純電動汽車與無級變速器匹配控制策略的建模與仿真
2016-07-15 03:28:15楊寶成趙海新張真忠
承德石油高等專科學校學報 2016年3期
楊寶成,趙海新,張真忠
(承德石油高等專科學校 汽車工程系,河北 承德 067000)
?
純電動汽車與無級變速器匹配控制策略的建模與仿真
楊寶成,趙海新,張真忠
(承德石油高等專科學校 汽車工程系,河北承德067000)
摘要:為了更好地節約電動汽車電池能量、增加其續航里程及滿足電動汽車在不同工況下的行駛要求。通過對機械電子式無級變速器的速比控制目標與要求進行分析,將駕駛員加速踏板的變化解釋為瞬時的功率需求。利用MATLAB/Simulink和Cruise兩種軟件的各自優勢,在MATLAB/Simulink環境中設計了一種經濟性和動力性折衷的速比PID控制器以實現速比控制;在Cruise中搭建了整車模型,將Simulink中的模型以API形式導入并進行聯合仿真分析。最后得出搭載EMCVT應用本文速比控制策略的電動汽車比搭載固定速比減速器的電動汽車加速時間短,爬坡能力更強,節約電池能量,續駛里程更長。
關鍵詞:電動汽車;無級變速器;匹配控制;MATLAB與Cruise;建模與仿真
電動汽車以良好的環保效果、噪音低、熱效率高、使用多種能源、機械結構和控制多樣化等特點得到了廣泛的關注和發展。傳動系統及控制是電動汽車行駛中的主要執行結構,其傳動效率及特性決定了汽車行駛的主要性能指標,它是電動汽車的重要部件。因此研發或完善能同時滿足車輛行駛過程中的各種工況要求,并具有良好的耐用性、經濟性、高效性等特點的傳動方式顯得尤為重要。而搭載無級變速器的純電動汽車,由于無級變速器的傳動比可以連續變化,從而使電動機在其最佳效率區工作,減少了蓄電池的電能消耗,增加了車輛的續航里程。然而要達到上述的目的,就需要對無級變速器的傳動比進行合理的控制。
1電動汽車與EMCVT匹配控制策略
無級變速器控制系統就是要根據駕駛員對加速踏板和制動踏板等操作,使電動機與變速器之間達到設計的工作狀態,使車輛的電動機輸出功率和行駛阻力之間實現動態的最佳匹配,從而使車輛具有良好的經濟性和動力性。裝有EMCVT電動汽車的續航里程和動力性主要取決于下面兩個條件[1]:
1)駕駛員采取動力性或者經濟性的駕駛意圖時,無級變速器的目標速比應滿足電動機對傳動比的要求。
2)在確定了目標傳動比之后,需選擇合適的速比控制算法使無級變速器的變化能夠跟隨目標傳動比而改變,而且要相應迅速,穩定性好。
為了很好地解決這兩個問題,就需要確定無級變速器的速比控制策略,它是無級變速器控制的核心,對整車的動力性和經濟性有很大的影響。
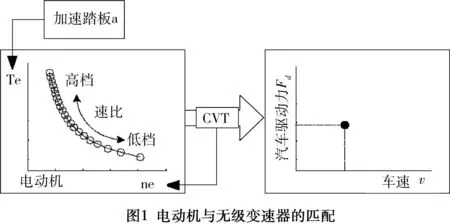
與傳統內燃機動力汽車搭載有級變速傳動系統的區別是,無級變速傳動系統和電動汽車匹配是面工況。當汽車車速和負荷一定時,對于裝有無級變速的車輛,由于速比可以連續變化,結合模型實現各自獨立的目標控制。無級變速器的速比控制策略就是選擇合適的速比,使電機的輸出轉速維持在給定的目標點,如圖1所示。
速比控制比較容易達到的控制策略在假設驅動電機的任意轉速和轉矩都可以在瞬時達到的前提下,使驅動電機的工作點根據駕駛意圖保持在最佳經濟性曲線或最佳動力性曲線上。如果使用這種速比控制策略,當駕駛員改變加速踏板的開度時,增加扭矩提升動力時,驅動電機控制器首先控制電機輸出轉矩,使其盡可能工作在最佳動力曲線上,然后再改變無級變速器的速比使電機的轉速帶到其目標的工作點上[2]。

若按照這種速比控制方式,在加速或減速過程的任一時刻,都要使電機工作在最佳動力或經濟曲線上。但是,驅動電機按這種方式運行時,由于在汽車急加速過程中電動機的后備功率不足,將會出現汽車的加速不良的現象。在這種情況下,就必須要求驅動電機的轉速在短時間內迅速提高,使電動機的輸出功率與加速踏板要求的目標功率相適應。而當驅動電機轉速迅速增大時,其大部分轉矩用來提高驅動電機和無級變速器輸入軸的轉速,從而導致汽車的速度減小,造成沖擊。
需要選擇一種對經濟性和動力性折衷的速比控制方法,充分利用電動機的轉矩余量,提高車輛瞬時的動力性能,在改善汽車驅動能力的同時,還可以減少電池的能量消耗,這樣既保證了電動汽車的動力性又兼顧了其行駛的經濟性,延長電動汽車的續駛里程。
這種對經濟性和動力性折衷的速比控制策略以驅動電機的最佳工作曲線作為穩態時電機的工作點,而瞬時工況卻與驅動電機沿著最佳經濟性或最佳動力性工作軌跡不同。為了充分利用驅動電機的儲備的后備轉矩,這種速比控制方式是控制驅動電機的轉速沿著加速踏板開度確定的目標功率的等功率曲線工作。如圖2所示,通過控制電機的轉矩和無級變速器的速比來調節驅動電機的轉速,如果電動機原來在工作點P1,加速踏板的位置改變后,控制器應該使其沿著目標功率的等功率曲線移動,直到與最佳功率線相交的目標工作點P2。顯然,這有時會受到電機最大轉矩曲線的限制。在這種情況下,控制電機的工作點沿著最大扭矩曲線移動,直到達到目標功率曲線[3]。
2EMCVT與整車模型的建立與仿真
MATLAB/Simulink是一個用以進行動態建模、仿真和分析的軟件包。系統提供了標準的模型庫,能夠幫助用戶在此基礎上創建新的模型庫,描述、模擬、評價和細化系統的行為,從而達到系統分析的目的。在Matlab中建立一個整車模型對使用者來說是十分困難,且精度難以得到保證。Cruise是由奧地利著名的AVL公司開發,用于研究汽車動力性、經濟性、排放性能及制動性能的高級模擬分析軟件,其靈活的模塊化理念使其可以對任意結構形式的汽車傳動系統進行建模和仿真[4]。本文采用這兩種軟件的優勢,利用Cruise搭建了整車模型,在MATLAB/Simulink中設計了EMCVT的PID速比控制策略,并通過與Matlab(API)的接口,便捷地對速比控制策略和整車性能進行研究分析。
2.1EMCVT PID控制器模型的建立
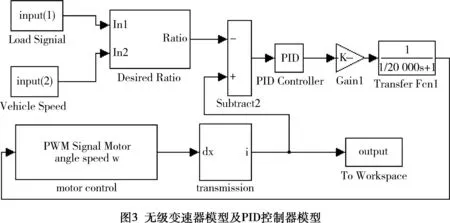
應用MATLAB軟件建立電控式無級變速器速比控制器模型如圖3所示,模型中的兩個輸入分別連接到Cruise軟件用戶桌面的信號輸入端,與其對應的輸出端分別為駕駛艙的加速踏板信號和車速信號。輸出端對應的是傳動比信號輸出給無級變速器效率模塊的信號輸入端。Matlab/Simulink的輸入速比PID控制器為目標速比和實際速比之差,經過負反饋的PID控制器控制無級變速器的速比,模型輸出為無級變速器的實際速比。
2.2整車模型
在分析EMCVT速比控制原理的基礎上,在MATLAB環境中設計了速比PID控制器,在Cruise中搭建了整車模型,將Simulink中模型以API形式導入并進行聯合仿真。在選定各子系統模塊后,根據汽車整車的配置方案和各部件之間的連接關系,用connect建立模塊之間的機械連接和電氣連接,如圖4所示。

3仿真結果分析
為了能夠比較EMCVT的控制策略的優劣,這里將固定速比減速器(FGR)和搭載EMCVT的電動汽車的動力性和經濟性進行了比較。對純電動汽車建立的經濟性能任務Cycle Run和動力性能任務Full Load Acceleration和Climbing Performance三個計算任務進行仿真。
3.1循環工況仿真結果分析
目前國內研制開發的純電動汽車主要是用于城區和市郊的居民上下班使用。為此,本文選擇了歐洲測試工況NEDC(由4個市區循環和1個市郊循環程序組成)作為循環行駛工況。
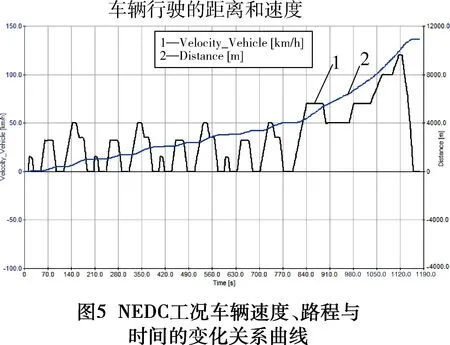
NEDC道路工況的速度、路程與時間的變化關系如圖5所示。圖6是該循環工況下搭載EMCVT和搭載FGR的電動汽車電池的SOC曲線與時間的關系。
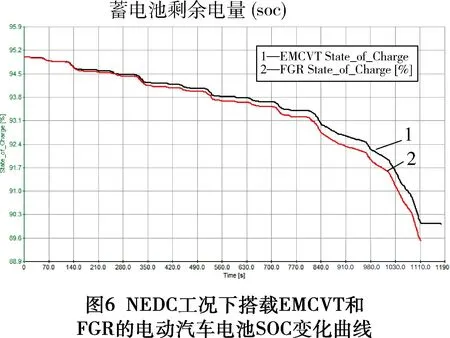
由圖6可以看出,在NEDC循環工況下,搭載EMCVT的電動汽車比搭載FGR的電動汽車的電池SOC節約能量為0.7%。
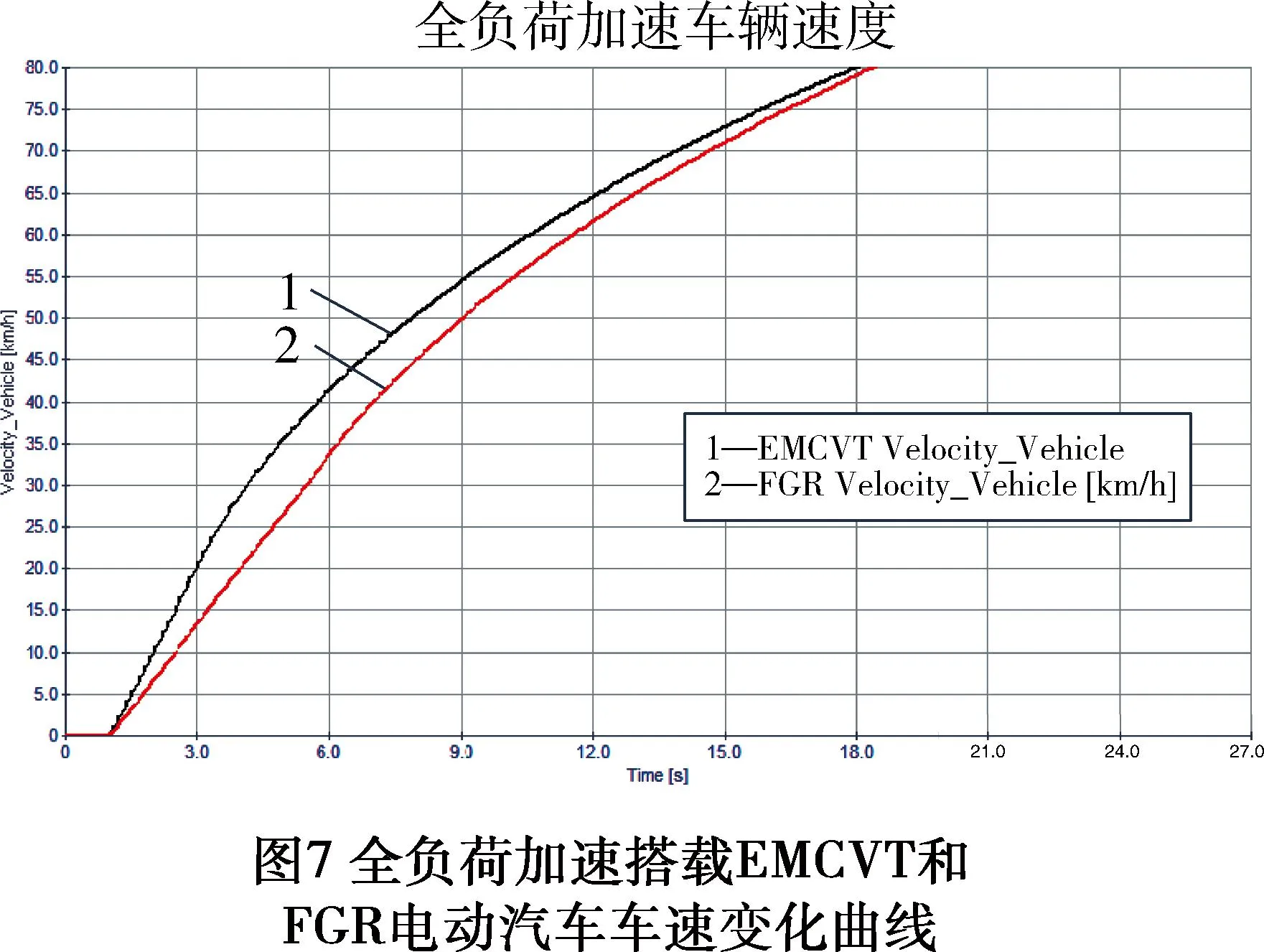
3.2全負荷加速性能仿真結果分析
在AVL CRUISE的Full Load Acceleration仿真任務中,忽略了坡道阻力,同時該計算任務必須在車輛滿載的條件下運算。
圖7表示車速變化曲線,搭載EMCVT的純電動汽車的加速性能為:0~50 km/h的加速時間7.9 s,50~80 km/h的加速時間9.36 s,搭載固定速比減速器的電動汽車加速性能為:0~50 km/h的加速時間9.0 s,50~80 km/h的加速時間10.0 s。EMCVT的傳動比連續變化,因此可以在PID控制器的控制下,隨著車速和加速踏板開度的改變獲得最佳的傳動比,各區段加速時間都要優于FGR。

3.3最大爬坡度性能仿真結果分析
在AVL CRUISE的Climbing Performance仿真任務中,設定車輛的載荷狀態為空載+100 kg的附加質量,得到的最大爬坡度仿真結果如圖8所示。
從圖8中可以看出,空載+100 kg的附加質量搭載EMCVT的純電動汽車在車速為20 km/h時,其最大爬坡度為27.9%,搭載FGR的純電動汽車在車速為20 km/h時,其最大爬坡度為24.4%,搭載EMCVT的電動汽車比搭載FGR的電動汽車的爬坡能力在車速超過34 km/h時兩者相差不多,而在車速小于 27 km/h 時提高了3.5%。
4結論
本文對EMCVT的速比控制目標和要求進行分析,采用一種經濟性和動力性折衷的速比控制策略。在MATLAB中建立PID的速比控制模型,在Cruise中建立整車模型,然后將Simulink中模型以API形式導入Cruise中進行聯合仿真。仿真得出搭載EMCVT的電動汽車比搭載固定速比減速器的電動汽車節約電池能量0.7%,全負荷時的加速性能0~50 km/h 的加速時間減少1.1s,50~80 km/h的加速時間減少0.64 s,車速小于27 km/h的時最大爬坡性能提高了3.5%。本文的數據得出搭載EMCVT應用本文的控制策略比搭載FGR的電動汽車續駛里程更長,加速時間更短,爬坡能力更強。本文的控制策略為電控無級變速器在電動汽車設計匹配上奠定了理論基礎。
參考文獻:
[1]周云山,鐘勇.汽車電子控制技術[M].北京:機械工業出版社,2004.
[2]安曉鵑,董秀國,彭彥宏.無級變速器傳動系綜合控制策略[J].吉林大學學報,2005,23(6):3-4.
[3]翟麗.電動轎車機電傳動系統的匹配與仿真[J],北京理工大學學報,2007,27(10):3-4.
[4]楊超. 基于Cruise純電動轎車動力學仿真研究[J],上海汽車,2006,20(10):2-3.
Modeling and Simulation of Match Control Strategy of Pure Electric Vehicle with Continuously Variable Transmission
YANG Bao-cheng, ZHAO Hai-xin, ZHANG Zhen-zhong
(Department of Automotive Engineering, Chengde Petroleum College, Chengde 067000, Hebei, China)
Abstract:In order to better conserve battery energy of electric vehicle, increase its driving distance and meet with the requirements in different driving conditions of electric vehicle, the paper analyzes the speed ratio control objectives and requirements of the continuously variable transmission. The driver’s accelerator pedal will be interpreted as the instantaneous power requirements. Taking advantage of their respective strengths of both MATLAB/Simulink and Cruise software, in the MATLAB/Simulink environment we designed a compromise speed ratio control strategy between power and economic PID controller of speed ratio, taking into account their respective advantage of MATLAB and Cruise software, in Cruise environment built a vehicle model, put the Simulink model through API interface into Cruise to complete co-simulation. The result of simulation is the vehicle with continuously variable transmission has better performance in terms of better acceleration, climbing ability stronger, more battery power saving, longer driving distance than the vehicle with fixed gear reducer.
Key words:electric vehicle; continuously variable transmission; match control; Matlab & Cruise; modeling & simulation
收稿日期:2016-01-20
作者簡介:楊寶成(1961-),男,河北豐寧人,承德石油高等專科學校汽車工程系工程師,主要從事汽車檢測與維修方面的教學研究。
中圖分類號:U469.72
文獻標識碼:A
文章編號:1008-9446(2016)03-0028-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
