電動公交客車雙電機驅動系統設計匹配及仿真研究*
2016-07-18 03:07:29蔣盛飛王哲孫晨樂章桐同濟大學新能源汽車工程中心上海201804
汽車技術 2016年6期
蔣盛飛 王哲 孫晨樂 章桐(同濟大學 新能源汽車工程中心,上海 201804)
?
電動公交客車雙電機驅動系統設計匹配及仿真研究*
蔣盛飛王哲孫晨樂章桐
(同濟大學 新能源汽車工程中心,上海 201804)
【摘要】針對目前大型電動公交客車驅動系統存在的不足,設計匹配一種雙電機驅動系統。以某城市電動公交客車為研究對象,對電驅動系統進行參數選型匹配,并基于AVL-Cruise軟件平臺,搭建整車仿真模型,制定雙電機驅動系統轉矩分配控制策略,對車輛動力性和經濟性進行仿真計算分析。結果表明,該雙電機驅動系統參數匹配合理,使車輛具有良好的動力性;該雙電機驅動系統可通過轉矩優化分配控制策略有效改善車輛的經濟性。
主題詞:電動公交客車雙電機驅動系統動力性經濟性
1 前言
電動公交客車作為一種新型的公共交通運輸工具,具有節能環保的優點,是公共交通領域未來的發展趨勢[1、2]。城市公交客車固定速比的單電機驅動系統很難同時兼顧車輛低速爬坡時的大轉矩需求以及高速行駛時的高轉速需求,目前的一種解決方案是在電機與驅動輪之間增加變速器,而目前國內變速器技術仍不成熟,車輛動力系統的故障率較高。另外,AMT會存在換擋沖擊及動力中斷問題,AT則有效率低的缺陷[4]。
另一種方案是采取2個大功率的電機進行動力耦合來完成驅動。這種方案的缺點為:兩個大電機增加了驅動系統的成本及空間布置難度;在道路擁堵的城市工況下,車輛行駛車速低,功率需求小,驅動系統長時間處于功率冗余的狀態,造成浪費。同時也由于低轉速、低負荷狀態下電機的效率較低而影響車輛的經濟性。所以,僅僅為滿足少數極限工況而選取兩個大功率電機的方案值得商榷。
但雙電機驅動相對單電機的明顯優勢在于動力系統的可靠性得到提高,即當其中一個驅動電機發生故障后,車輛仍可由另一個電機完成驅動,故雙電機方案的安全系數較高,其對公共交通車輛尤為重要。因此,本文針對目前電動公交客車驅動系統的特點及不足,研究一種兼顧動力性和經濟性以及可靠性高的雙電機耦合驅動方案。
2 雙電機耦合驅動系統結構特點
動力耦合方式大體上可分為轉速耦合、轉矩耦合以及功率耦合3大類。轉矩耦合一般采用定軸齒輪式,耦合傳動結構簡單,可靠性高。轉速耦合和功率耦合主要采用行星齒輪機構,利用行星齒輪可擁有兩個自由度的結構特性,在沒有無極變速器的情況下可實現車輛的無極變速[5~7],豐田Prius就是典型的功率分流耦合結構。
針對電動公交客車驅動系統設計一種基于行星齒輪變速機構的雙電機轉矩耦合方案,其結構示意如圖1所示。在此耦合系統中,電機1、2分別布置在行星齒輪兩側,電機1的一端與行星架相連,另一端與耦合系統的輸出軸相連,電機2與太陽輪相連,也可通過離合器2與行星架相連,此時行星齒輪耦合機構相當于一根傳動軸,傳動比為1,兩個電機之間通過行星齒輪變速機構來完成動力耦合。齒圈通過離合器1的接合與分離來改變運動自由度。耦合機構通過離合器1、2的接合與分離來改變傳動速比。
行星齒輪各部件之間的轉矩、轉速特性滿足:
式中,k為齒圈和太陽輪的齒數比;nt、Tt分別為太陽輪的轉速和轉矩;nq、Tq分別為齒圈的轉速和轉矩;nj、Tj分別為行星架的轉速和轉矩。
針對此雙電機耦合系統的結構特點,提出3種工作模式。
a.模式1
車輛在起步加速或低速爬坡時,離合器1接合,離合器2分離,行星齒輪完成減速增扭,以保證車輛的大扭矩需求,則有
式中,T、n分別為耦合機構輸出軸的轉矩和轉速;T1、n1分別為電機1的輸出轉矩和轉速;T2和n2分別為電機2的輸出轉矩和轉速。
b.模式2
當電機2的轉速達到一定值后,離合器1分離,電機2轉速降低至與電機1相近時,離合器2接合,此時行星齒輪以固定軸式傳動,其傳動比為1,以確保車輛高速行駛時電機2能繼續提供動力輸出,此時有
c.模式3
車輛低速行駛或定速巡航工況時,需求功率較小,此時可采用單電機驅動,離合器1、2都處于分離狀態,電機1單獨驅動車輛,電機2則變成自由狀態。此時耦合系統的動力輸出為:
3 雙電機耦合驅動系統參數匹配
驅動系統的參數匹配針對給定車型、目標工況以及基本控制策略,在保證車輛動力性要求的前提下進行設計計算[8]。參數匹配主要包括兩臺工作電機的性能指標設計以及行星齒輪耦合機構的傳動比設計。
驅動電機的選型包括電機的峰值功率、額定功率、最高轉速、額定轉速、峰值轉矩以及額定轉矩等參數[9]。其中,電機的額定功率原則上要滿足車輛以最高車速行駛時的功率需求,因此對于該雙電機耦合驅動系統兩臺電機耦合后的額定輸出功率應滿足最高車速行駛時車輛的需求功率,即
式中,Pe為耦合驅動系統的額定輸出功率;P1e為電機1的額定輸出功率;P2e為電機2的額定輸出功率;vmax為最高車速;η為耦合驅動系統到車輪的效率;m為整車滿載質量;f為滾動阻力系數;Cd為空氣阻力系數;Af為迎風面積。
電機最高轉速由車輛最高車速的設計指標即耦合驅動系統的最高輸出轉速來確定,則有
式中,nmax為耦合系統的最高輸出轉速;n1max為電機1的最高輸出轉速;n2max為電機2的最高輸出轉速;i0為主減速器傳動比;r為車輪滾動半徑。
驅動系統還要滿足車輛低速(10 km∕h)爬坡時的動力需求。對于該耦合機構,當離合器1接合、離合器2分離時,驅動系統達到最大轉矩輸出。
式中,Tmax為耦合系統的最大輸出轉矩;T1max為電機1的峰值輸出轉矩;T2max為電機2的峰值輸出轉矩;α為道路坡度;n2_0為電機2的基速;v1為爬坡車速。
基于以上理論分析,針對某款城市公交客車進行實例匹配計算。目標車輛的基本參數以及相關動力性指標如表1所列。

表1 整車基本參數與動力性能指標
由于雙電機耦合系統中行星齒輪機構的速比參數k存在一定的可調范圍,故兩個電機的匹配選型可存在多種組合方案。從降低成本及減小控制難度等方面考慮,選擇兩款相同性能的電機,最終選型結果如表2所列。
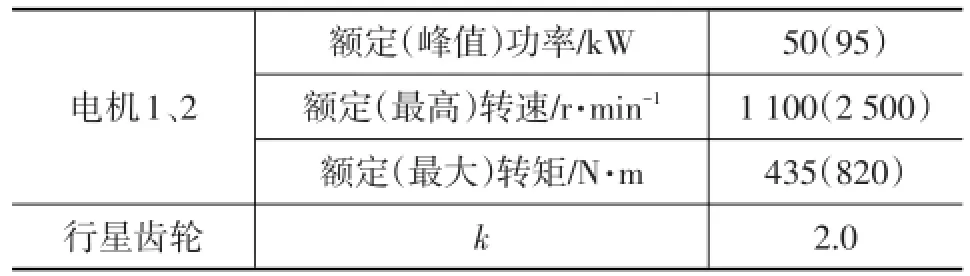
表2 驅動耦合系統選型匹配結果
4 車輛動力性仿真
為了驗證匹配計算結果的合理性,根據所設計雙電機耦合驅動系統的結構形式,基于AVL-Cruise仿真平臺搭建整車仿真模型,如圖2所示。
在整車仿真模型搭建過程中需要輸入驅動電機的性能參數。根據電機基本參數選取某公司一款性能相近的車用永磁同步電機作為參考樣機來進行仿真研究,該電機的相關參數如表3所列。

表3 參考電機的基本性能參數
該電機的試驗測試性能曲線如圖3所示。
由表3及圖3可知,該電機與前面匹配計算的電機性能基本一致,可作為電機模型進行仿真計算。由此,根據目標車輛設計的動力性指標進行仿真分析驗證,主要驗證的參數有最高車速、最大爬坡度以及0-50 km∕h的加速時間。仿真結果如圖4~圖7所示。
由圖4可知,所選電機最高轉速滿足車輛最高車速的要求。由圖5可知,驅動系統滿足車輛最高車速下的動力需求。圖6顯示車輛在滿載狀態下最大爬坡度超過20%,滿足設計要求。由圖7可以看出,車輛滿載下的0-50 km∕h加速時間較短,車輛具有良好的起步加速性能。由以上仿真結果可知,雙電機耦合驅動系統的選型匹配結果滿足車輛的動力性要求。
5 車輛經濟性仿真
5.1雙電機耦合系統控制策略
車用電機性能的優劣對車輛的經濟性有至關重要的影響。所選電機為永磁同步電機,其具有結構簡單、運行效率高的特點。圖8所示為該電機系統(電機及其控制器系統)在電動狀態下的效率MAP圖。
從圖8中可以看出,該電機系統的高效區(>90%)集中于中高速工況下,在低速區以及低負荷狀態下系統的工作效率低。由于電機的負荷及轉速直接受制于車輛的行駛工況,對于一般的單電機驅動系統無法避免這些低效區間。由于采用行星齒輪耦合機構,該雙電機驅動系統不僅具有傳動平穩、傳動效率高的特點,而且擁有靈活多變的工作模式,一方面可以使耦合系統發揮極大的轉矩性能,滿足車輛的動力性要求,另一方面則可以根據電機的效率特性來制定相應的控制策略,從而提高驅動系統的工作效率,改善車輛的經濟性。
基于雙電機耦合結構的特點,制定兩種不同的控制策略。
a.策略1:基于單一模式的平均轉矩分配控制策略。車輛在行駛時,雙電機機構始終以工作模式2來完成耦合驅動,其中電機1和電機2以相同轉速和轉矩輸出動力,此時雙電機系統可類比為固定速比的單個大功率電機驅動結構。
b.策略2:基于多種模式的轉矩優化分配控制策略。車輛起步時,離合器1接合,離合器2分離,驅動系統以工作模式1完成驅動。當電機2的轉速達到一定數值后,離合器1分離,離合器2接合,兩個電機以相同轉速工作,驅動系統切換至工作模式2。其中,兩個電機的轉矩分配策略如圖9所示。
5.2不同控制策略下的經濟性仿真
針對上述兩種控制策略,基于中國典型城市公交工況和日本城市工況對整車經濟型進行仿真計算,得出相應能耗。兩種城市工況如圖10和圖11所示。
基于AVL-Cruise仿真平臺,完成車輛在不同載荷、不同工況以及不同控制策略下的經濟性仿真。仿真計算中默認關閉車輛空調附件等耗能部件,而且耦合系統中電機均沒有進行回饋制動。仿真結果見表4。
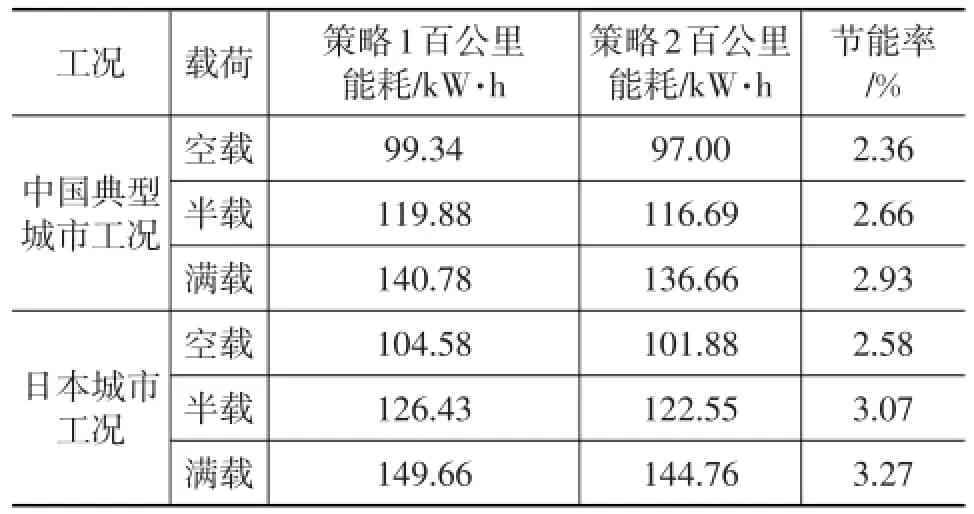
表4 兩種控制策略下車輛的百公里能耗
由表4可知,基于多種模式的轉矩優化分配控制策略相對平均轉矩分配控制策略可使車輛的能耗得到有效改善,其節能率達到3%。由此可以看出,雙電機耦合驅動系統可根據自身結構特點,制定合理的控制策略來改善車輛的經濟性。同時也表明,雙電機驅動比單電機驅動方式在經濟性上更具優勢。
6 結束語
a.提出雙電機耦合驅動系統的參數匹配計算方法,并基于某款12 m城市公交客車的原車參數完成系統的參數匹配選型,最終選取兩款峰值功率為95 kW的驅動電機。
b.基于AVL-Cruise軟件搭建系統的仿真模型,對整車的動力性進行仿真驗證,仿真結果表明,雙電機驅動系統參數匹配合理,車輛具有良好的動力性能。
c.針對雙電機驅動系統特點提出兩種控制策略,并對車輛在不同城市工況下的能耗進行仿真對比,結果表明擁有多種工作模式的雙電機耦合驅動系統可有效改善車輛的經濟性,其節能率達到3%。
參考文獻
1任保寬,任秀蘋,李曉霞.國內新能源公交車發展狀況及問題探析.交通節能與環保,2013,04:28~32.
2時洪功.我國新能源客車產業化發展路徑.客車技術與研究,2011(5):1~4.
3Komori S,Kagiyama T,Utsugi M,et al.Two-dimensional resistivity structure of Unzen Volcano revealed by AMT and MT surveys.Earth,Planets and Space,2013,65(7):759~766.
4李川.雙電機混合動力客車換擋無動力中斷的研究:[學位論文].長春:吉林大學,2009.
5Zhang X,Li C T,Kum D,et al.Configuration Analysis of Power-Split Hybrid Vehicles With a Single Planetary Gear. IEEE Transactions on Vehicular Technology,2012,61(8):3544~3552.
6Abdul A,Shafqat M S,Qureshi M A,et al.Performance Analysis of Power Split Hybrid Electric Vehicles Using Autonomie.IEEE Student Conference on Research and Development,2011,144~147.
7Jian L,Xu G,Wu Y,et al.A Novel Power-train Using Coaxial Magnetic Gear For Power-split Hybrid Electric Vehicles. International Conference on Electrical Machines and Systems,2011.
8Wu X,Zhang C,Wang Z,et al.System matching and simulation of dual-motor drive coupling for electric vehicles.International Conference on Consumer Electronics,Communications and Networks,2011:2699~2702.
9周飛鯤.純電動汽車動力系統參數匹配及整車控制策略研究:[學位論文].長春:吉林大學,2013.
(責任編輯晨曦)
修改稿收到日期為2015年12月1日。
中圖分類號:U469.7
文獻標識碼:A
文章編號:1000-3703(2016)06-0028-04
*基金項目:上海市科委項目(14DZ1202800)。
Dual-motor Propulsion System Design Match and Simulation Research for Electric City Bus
Jiang Shengfei,Wang Zhe,Sun Chenle,Zhang Tong
(Clean Energy Automotive Engineering Center,Tongji University,Shanghai 201804)
【Abstract】In view of the propulsion system′s shortcomings on the current large electric city bus,a dual-motor propulsion structure is designed and matched.This paper takes a city electric bus as research object to match the parameters for dual-motor propulsion system.Besides,the vehicle′s simulation model and the torque distribution control strategy of propulsion system are built in software platform AVL-Cruise,to simulate and analyze the vehicle′s dynamic property as well as the fuel economy.The results show that the parameter matching of the dual-motor propulsion system are rational,which enables the vehicle with good dynamic property,and it can improve vehicle′s fuel economy by the distribution of torque optimization control strategy.
Key words:Electric bus,Dual-motor propulsion system,Dynamic property,Economy
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
