基于離散多目標優化粒子群算法的多移動代理協作規劃
2016-07-18 11:50:52史霄波張引趙杉肖登明
通信學報 2016年6期
史霄波,張引,趙杉,肖登明
?
基于離散多目標優化粒子群算法的多移動代理協作規劃
史霄波1,2,3,張引4,趙杉2,肖登明2
(1. 河南師范大學計算機與信息工程學院,河南新鄉 453007;2. 華中科技大學計算機科學與技術學院,湖北武漢 430074; 3. 智慧商務與物聯網技術河南省工程實驗室,河南新鄉 453007;4. 中南財經政法大學信息與安全工程學院,湖北武漢 430073)
無線傳感器網絡中多移動代理協作能快速高效地完成感知數據匯聚任務,但是隨著移動代理訪問數據源節點數的增加,移動代理攜帶的數據分組會逐漸增大,導致傳感器節點能量負載不均衡,部分數據源節點能耗過快,網絡生存期縮短。目前,針對該問題所設計的能耗均衡算法,多以降低多移動代理總能耗為目標,卻未充分考慮部分數據源節點能量消耗過快對網絡生存期造成的影響。提出離散多目標優化粒子群算法,以網絡的總能耗和移動代理負載均衡作為適應度函數,在多移動代理協作路徑規劃中尋求近似最優解。通過仿真實驗驗證,所提出的多移動代理協作路徑規劃,在網絡總能耗和網絡生存期方面的性能優于同類其他算法。
移動代理;無線傳感器網絡;負載均衡;網絡生存期
1 引言
無線傳感器網絡(WSN, wireless sensor network)可以將大規模的傳感器部署在各種各樣的地形甚至危險地區。WSN多采用自組網的方式進行通信,若和無人機等其他無人操控設備共同構建網絡,可用于天氣預測、災情監測、軍事、交通管理、野外火災監測等[1,2]。由于傳感器節點能量有限,因此,如何最大限度利用有限的能量,盡可能延長網絡生存期,是無線傳感器網絡的研究熱點之一[3]。Konstantopoulos等[4]將無線傳感器網絡中的數據融合技術歸結為4類:簇式、鏈式、樹狀和移動代理(MA, mobile agent)的方法。文獻[5]提出,地面傳感器網絡采用簇式結構,簇頭與無人機進行通信,但是在監測點分布分散,簇頭與感知數據的傳感器之間距離已經超出傳輸范圍的情況下,地面傳感器網絡適合使用移動代理數據融合技術代替簇式結構[6]。圖1使用移動代理融合技術的WSN(MAWSN, mobile agent wireless sensor network)中部署數據匯聚節點Sink與無人機進行通信,數據收集包括2部分:無人機與Sink通信,Sink派出移動代理收集數據源傳感器數據。此外,移動代理技術應用于物聯網領域可以增強系統的智能性,如智慧城市[7]、RFID[8]等。
MAWSN中隨著MA訪問數據源傳感器數量增多,攜帶的數據量增大,經過傳感器節點的能耗逐漸增大,路徑遠端的數據源節點能耗遠遠大于路徑近端的數據源節點能耗。在單代理路徑規劃(SIP,single agent itinerary planning)中,由Sink派出單個移動代理訪問所有的數據源傳感器節點,將傳感器感知的數據匯聚到Sink節點。在SIP算法中(如LCF/GCF[9]、IEMF/IEMA[10]等算法),單個MA需要訪問所有的數據源節點,帶來較嚴重的能耗不均衡和較大的數據延遲問題。多代理路徑協作規劃(MIP, multi agent itinerary planning)[11]將傳感器節點進行分組,每組由Sink派出一個移動代理進行訪問,分別將傳感器感知的數據匯聚到Sink節點,如GA-MIP[12]算法、DSG-MIP[13]算法、TBID[14]算法、NOID[15]算法、BST/MST[16]算法等。MIP算法可以看作是SIP算法的迭代。
MIP算法在一定程度上緩解了數據源節點能耗不均衡和數據延遲的問題,但是現有的MIP算法仍存在局限性。如MST/BST算法、NOID算法、TBID算法考慮總能耗最小構建生成樹,但會因為數據源節點分布密度不均衡而造成單個移動代理訪問數據源節點過多,延遲大,部分數據源節點能耗過高,移動代理能量負載不均衡。GA-MIP算法使用遺傳算法進行移動代理的路徑規劃,通過若干次迭代尋找優化的路徑規劃方案,但由于評價函數僅考慮總能耗,也會因為能量負載不均衡影響網絡的生存期。DSG-MIP算法根據設定的半徑尋找Sink的鄰居節點,以每個鄰居節點為起點規劃一條能耗最小的MA路徑訪問指定扇形區域內的數據源節點。當數據源節點分布均勻時,DSG-MIP算法可以規劃出能量效率高的路徑,但是當數據源節點密集分布在少數以Sink節點鄰居節點為圓心的扇形區域時,單個MA訪問數據源節點數量過多,部分數據源節點能量消耗過快。
綜上所述,現有多移動代理的算法規劃MA協作路徑時只考慮總的能量消耗,會因為數據源節點分布密度的不均衡造成單個移動代理訪問的節點數過多,部分數據源節點能耗過高,移動代理能量負載不均衡,影響網絡的生存期。
針對多MA協作路徑規劃存在的問題,考慮WSN中MIP的特性,本文設計離散多目標優化粒子群算法(DMP-MIP, discrete multi-objectives optimization particle swarm optimizer for MIP),用粒子表示移動代理訪問數據源傳感器的分組和訪問順序,通過每次迭代更新粒子得到移動代理新的路徑,以總能耗和移動代理的負載均衡為優化目標評價粒子,尋找近似最優解。文中用到的主要符號定義如表1所示。
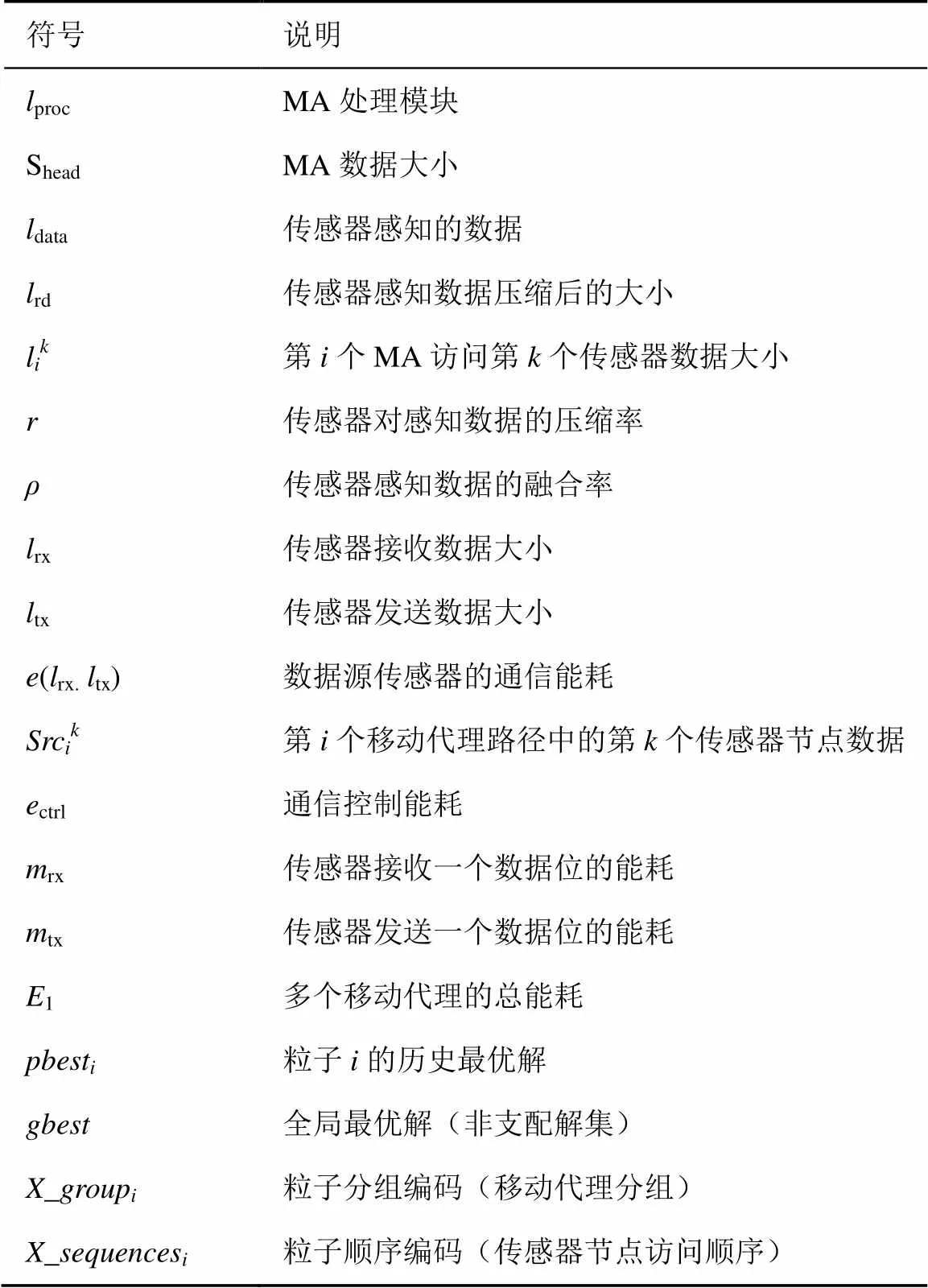
表1 主要符號說明
2 問題描述
假設在MAWSN中隨機密集部署無線傳感器,傳感器節點的能量有限,個監測點作為數據源節點,所有傳感器節點初始能量已知,網絡中設置一個匯聚節點(Sink),且能量不受限制。當異常情況發生時,無人機向地面無線傳感器網絡中Sink發出命令,Sink派出MA按照規劃好的路徑以無線多跳的方式訪問所有個監測點的數據源傳感器節點,將數據源傳感器節點執行監測任務感知數據帶回Sink節點。
2.1 數據融合模型
本文采用與文獻[10]相同的數據融合模型,Sink派出MA時包括固定的數據大小,l0表示第個MA的初始大小,l0=proc+head,其中,proc和head分別表示MA中處理模塊和MA自身數據。假設所有數據源傳感器感知的數據大小相同為data,第個MA訪問路徑中第個數據源傳感器節點后的大小用l表示。MA訪問第1個數據源節點后的大小為l1= l0+rd,其中,rd=(1?)data表示壓縮后的感知數據,表示壓縮率。MA訪問路徑中第2個到第個數據源傳感器節點時為了減少數據冗余,將當前傳感器節點感知的數據和MA傳遞的數據進行融合。(0≤≤1)表示數據的融合率,1表示數據完全融合,0表示數據沒有融合,假設所有數據源節點的融合率相同。MA訪問第個數據源節點后的大小為

MA訪問所有的個數據源節點后,l的值在內,取值時表示個傳感器感知的數據完全融合成一個數據,取值時表示個傳感器的數據完全沒有融合。
2.2 能耗模型
根據2.1節數據融合模型MA訪問節點后的大小對MA訪問傳感器的能耗進行估算,主要包括數據感知、接收、發送、數據壓縮、數據融合等能耗[10]。表示第個MA的路徑,MA從Sink節點出發訪問所有的個傳感器節點后返回。每一個節點的通信能耗包括接收數據分組的能耗、控制能耗和發送能耗。定義ctrl為節點數據通信的控制能耗,rx和tx分別是接收和發送一個數據位的能耗。一個數據源節點的通信能耗表示為

(3)
個MA的總能耗為

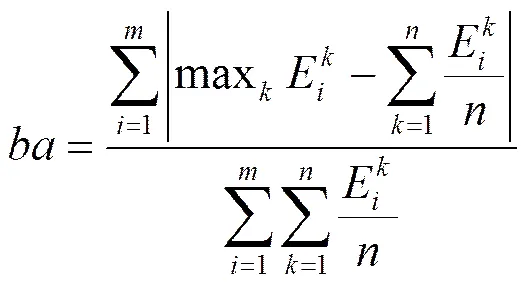
2.3 移動代理負載均衡
移動代理負載均衡表示移動代理訪問的所有數據源節點之間的能耗均衡性,定義如下
2.4 多移動代理協作路徑規劃
將MAWSN抽象為圖(,),將數據源傳感器節點的集合分成個子集1~V,=1∪2…∪V,是移動代理的數量,對于每一個V(1≤≤)找出一個Sink出發,連接所有數據源節點,返回Sink的回路,作為一條MA訪問傳感器節點的路徑。多MA協作路徑規劃的目標是為尋找到評價函數值最優的MA路徑,評價函數如下

評價函數中包括總能量消耗和負載均衡2個目標,多目標優化算法尋找最優解就是建立非支配解集,類似于單目標優化問題尋找最優解[17]。
定義1 設1和2是多MA協作路徑規劃的2個可行解,如果,稱1支配2,否則,稱1、2互相非支配。
定義2 非支配解是不被可行解集中的任何解支配的解,非支配解集是所有非支配解的集合[18]。
3 DMP-MIP算法
3.1 MOCLPSO算法
粒子群算法(PSO, particle swarm optimization)是仿生進化算法,模仿自然界鳥群覓食的行為,粒子群中每個粒子通過向粒子歷史最優解,以及當前群內最優解學習改變粒子的速度和位置,最終接近最優解。MOCLPSO算法[17]是用于解決多目標優化問題的PSO算法,結構簡單,收斂迅速,在解決優化問題時具有較好的優勢,算法在每一代更新粒子速度和位置時選擇使用粒子歷史最優解、其他粒子歷史最優解、全局最優解,保證了粒子群的多樣性有效地避免早熟收斂的出現。
MOCLPSO算法中粒子速度的更新分3種情況,使用粒子群最優解更新速度用式(7),使用其他粒子歷史最優解用式(8),使用粒子歷史最優解更新速度用式(9)。粒子位置的更新使用式(10)。

(8)
(9)

其中,X和V分別代表第個粒子的位置和速度,pbest是第個粒子位置的歷史最優解,是整個粒子群中粒子位置的當前最優解,pbest是第f個粒子位置的歷史最優解是慣性權值,()是[0,1]的隨機數。
粒子位置和速度更新后,尋找當前粒子和所有粒子的非支配解更新歷史最優解pbest和全局最優解。最終得到非支配解的集合是全局最優解,等價于單目標優化算法尋找到最優解。MOCLPSO在非支配解集合中隨機選擇一個解作為算法的解。
3.2 DMP-MIP算法研究
PSO算法和MOCLPSO算法用于解決連續的問題,經過離散化處理后可以用于解決TSP問題[19]。多移動代理協作路徑規劃問題是離散化問題,本文根據多移動代理協作路徑規劃的特點,設計離散多目標優化粒子群算法用于多移動代理協作路徑規劃。
3.2.1 編碼
每一個多代理協作路徑規劃作為一個粒子,采用整數編碼的方式,分為2個部分:數據源分組編碼和數據源順序編碼[12]。數據源分組編碼表示派出移動代理的分組情況,以及每個移動代理訪問數據源節點數,個數據源節點最多分為組派出個移動代理。數據源順序編碼表示每個移動代理訪問數據源節點的順序。
如圖2所示,共有8個數據源節點,分為3組:第1個移動代理訪問4個數據源節點{6,3,2,4},第2個移動代理訪問3個數據源節點{8,1,7},第3個移動代理訪問1個數據源節點{5}。
數據源分組編碼按照訪問節點的數量降序排列,如果不按分組節點數降序排列,就會出現不同編碼表示相同的多代理路徑規劃。
3.2.2 粒子速度和位置更新
每一次迭代進化操作對粒子的位置和速度進行更新操作,這里為粒子設計更新操作。粒子速度式參照式(7)~式(9)修改為式(11),粒子位置的更新參照式(10)修改為式(12)。

(12)
1) 粒子自學習更新速度
粒子速度更新式(11)中的第一項分別使用式(13)和式(14)實現。

(14)
其中,(X_group)表示粒子數據源分組編碼變異操作[12],隨機數()<時執行更新操作。更新時從第個粒子的數據源分組編碼X_group中隨機選擇2組分別進行減1和加1操作,然后降序排列,得到更新后的分組編碼。(X_sequences)表示粒子數據源順序編碼變異操作[12],隨機數()<時執行更新操作。變異時隨機選擇第個粒子的數據源順序編碼X_sequences中一定數量的數據源節點,兩兩進行交換,得到更新之后的數據源順序編碼。
2) 粒子學習最優解更新速度
粒子速度更新式(11)中的第2項使用式(15)實現。
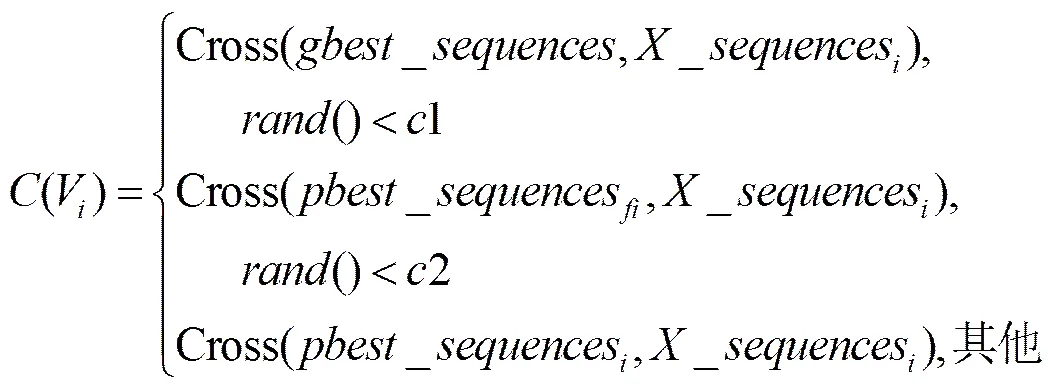
其中,Cross表示粒子數據源順序編碼更新操作,更新時考慮到編碼由數據源分組編碼和數據源順序編碼2部分組成,更新操作選擇一組數據源節點,整組進行交換操作。Cross操作和文獻[12]中交叉操作相似,但文獻[12]中只有分組完全相同的兩組編碼才能將對應的源順序編碼進行交叉操作,Cross操作對分組沒有限制。
粒子學習最優解更新速度時,判斷隨機數()滿足的條件,第個粒子的數據源順序編碼_sequences中的一組數據源節點分別和其歷史最優解_sequences、全局最優解_sequences或第f個粒子的歷史最優解中的一組數據源節點進行更新操作。Cross操作分3步完成:①在2個待更新粒子的數據源分組編碼中分別選擇一組;②在一個粒子選定組的位置添加另一個粒子選定組的對應編碼;③刪除重復的數據源節點編碼。
3) 粒子位置更新
粒子位置更新使用式(12),隨機數()<時粒子位置用更新后的粒子速度更新;否則,保持當前的粒子位置。
3.2.3 更新最優解
適應度函數中包含網絡負載均衡和總能耗I這2個目標,對每一個粒子計算其負載均衡值和能耗I值。
使用文獻[17]更新粒子歷史最優解算法更新pbest,根據適應度函數中網絡負載均衡和總能耗I這2個目標值判斷當前的粒子X是否滿足更新其歷史最優解pbest條件,設置常量б(值根據具體情況選擇),當粒子的歷史最優解超過б代都沒更新時拋棄原有的粒子,產生新的第個粒子。
全局最優解是一個集合,也就是非支配解的集合。更新全局最優解算法[17]使用粒子歷史最優解pbest對全局最優解進行更新。根據pbest和中所有粒子的網絡負載均衡和總能耗I進行判斷,如果pbest被支配全局最優解不變;如果pbest支配中的部分粒子,被支配的粒子刪除掉,pbest加入;如果pbest和互相非支配,pbest加入。
3.2.4 算法實施
算法的執行分為3個步驟:①初始化粒子群,計算每一個粒子適應度函數值,初始化粒子最優解和全局最優解集合;②迭代更新粒子速度和位置,更新粒子歷史最優解pbest和全局最優解集合;③滿足迭代結束條件時從全局最優解集合中選擇能耗最小的粒子作為算法最優解輸出。算法流程如圖3所示。
3.2.5 算法復雜度分析
定理1 設表示粒子群空間大小,表示粒子群維度(數據源順序編碼維度+數據源分組編碼維度),表示迭代次數,算法時間復雜度是()。
證明 從算法的流程可以看到每一次迭代執行更新粒子位置和速度操作的時間復雜度為(),更新粒子全局最優解和粒子最優解操作的時間復雜度為(),所以算法的時間復雜度為()。
4 仿真
文獻[12]中多移動代理算法GA-MIP算法和本文提出的算法都屬于仿生進化算法,文獻[13]中DSG-MIP算法是解決MA路徑規劃問題的新方法融合了多種方法的優勢,文獻[9]中單移動代理LCF算法是單移動代理的經典算法,所以用本文提出的DMP-MIP算法和以上3種方法進行仿真實驗對比。使用OPNET[20]在1 000 m×500 m的范圍內隨機部署800個傳感器節點,Sink節點部署在網絡的中心,隨機選取一定數量的數據源傳感器節點。
如圖4所示,隨機選擇10個數據源節點,Sink節點派出2個移動代理訪問數據源節點。
移動代理從Sink節點派出,以無線多跳的方式到達規劃路徑中的每個傳感器節點,將數據源傳感器節點感知的數據匯聚,傳遞給Sink節點。網絡仿真參數設置如表2所示。
4.1 評價指標
為了評價移動代理路徑規劃的時間和能量效率,這里使用以下的幾個評價指標。
總能耗:包括移動代理中從Sink節點出發到返回Sink節點經過的所有數據源節點和中間節點的數據感知能耗、數據壓縮能耗、數據融合能耗、數據接收能耗、數據發送能耗、監聽能耗、串擾能耗等。
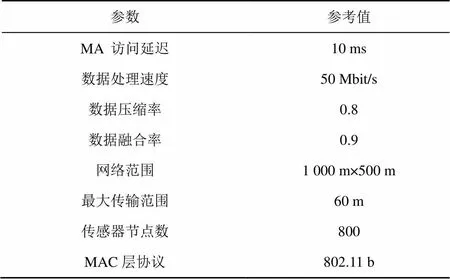
表2 移動代理WSN仿真參數
生存期:數據源節點是數據感知任務的關鍵節點,數據源節點的生存期定義為現有能量可以執行任務的次數,以WSN中所有數據源節點中最短生存期作為WSN的生存期。
任務延遲:SIP算法中延遲指MA從Sink出發到返回Sink的時間,MIP算法同時派出多個MA,以最后返回Sink節點MA的時間作為其延遲時間。
EDP:總能耗和延遲的乘積,總能耗和時間綜合評價性能,值越小表示算法的整體性能越好。
4.2 DMP-MIP算法參數設置
粒子群空間大小和迭代次數對算法的性能有影響,下面對群空間和迭代次數對總能耗的影響進行分析。仿真結果顯示大的粒子群搜索空間和較多的迭代次數搜索到的路徑解具有較小的能耗,但是計算量大。實驗在迭代次數達到300時總能耗的變化趨于平穩,粒子群空間80時總能能耗接近最小,所以選擇粒子群空間大小80、迭代300代,如圖5和圖6所示。
4.3 仿真結果
數據源傳感器節點數設置為5~40,步長5,數據源傳感器節點的位置隨機分布,設置200個不同的隨機數種子運行仿真,對DMP-MIP算法和文獻[12]中GA-MIP算法、文獻[9]中LCF算法、文獻[13]中DSG-MIP算法性能取平均值進行比較。
如圖7所示,3種MIP算法在數據源節點數較少的情況下總能耗和LCF基本相同,隨著節點數的增加雖然總能耗高于LCF算法,因為MIP算法派出多個移動代理,每個移動代理自身的數據增加了額外的能耗,DMP-MIP算法在能耗上明顯低于同類的GA-MIP算法和DSG-MIP算法。
圖8為數據源節點數對生存期的影響,DMP-MIP、GA-MIP、DSG-MIP算法生存期超出LCF算法多倍,因為SIP算法用一個MA訪問所有數據源節點,MA最后訪問的數據源傳感器節點能耗過高,而MIP算法派出多個MA訪問數據源節點,每個MA訪問數據源節點數相對SIP少,數據源傳感器節點的能耗相對均衡,從而延長網絡的生存期。數據源傳感器節點數增大時LCF算法生存期急劇下降。DMP-MIP、DSG-MIP和GA-MIP生存期隨著數據源節點數的增加也呈現緩慢下降的趨勢,DMP-MIP算法在路徑規劃時考慮移動代理負載均衡,生存期比GA-MIP和DSG-MIP算法長。
圖9為數據源節點數對任務延遲的影響,MIP算法任務延遲明顯小于LCF算法。LCF算法Sink派出一個MA訪問分布在WSN中的所有傳感器節點延遲較大,而MIP算法Sink派出多個MA訪問傳感器節點,節省較多的時間。GA-MIP、DMP-MIP、DSG-MIP 3種算法在數據源節點數增加時,因為單個移動代理要訪問的數據源節點數增加,任務延遲呈增加趨勢。
EDP在衡量路徑規劃算法的效率是一項非常重要的參數,圖10顯示3種MIP算法的EDP明顯低于LCF算法,DMP-MIP算法的EDP低于GA-MIP和DSG-MIP。
5 結束語
移動代理的使用可以促進WSN智能化,多移動代理協作是優化移動代理能耗的關鍵問題。本文首先介紹了現有SIP算法和MIP算法,這些算法在規劃路徑時考慮總能耗,忽略單個傳感器節點的能耗均衡問題,影響網絡的生存期。為了解決這個問題,本文設計了基于總能耗和移動代理負載均衡2個約束目標的DMP-MIP算法,通過大量的仿真對比實驗,仿真結果顯示該算法在各項評價指標上均優于同類算法。
WSN中使用多移動代理協作規劃下一步研究,可以將固定的Sink改變為移動的Sink,更適應于真實的應用,路徑規劃仿真假設所有的傳感器節點都是可用的,真實的環境中可能有些傳感器無法使用,設計動態的路徑規劃才能滿足需要。
[1] VARAKLIOTIS S, HAILES S, DENARIDI R, et al. UAV and cognitive radio technologies in the emergency services arena[J/OL]. British Association of Public Safety Communications Officials, http://eprints. ucl.ac.uk.
[2] ZAJKOWSKI T, DUNAGAN S, EILERS J. Small UAS communications mission[C]//Eleventh Biennial USDA Forest Service Remote Sensing Applications. Salt Lake City, UT, c2006.
[3] SALEEM F, MOEEN Y, BEHZAD M, et al. IDDR: Improved density controlled divide-and-rule scheme for energy efficient routing in wireless sensor networks[J]. Procedia Computer Science, 2014, 34: 212-219.
[4] KONSTANTOPOULOS C, MPITZIOPOULOS A, GAVALAS D, et al. Effective determination of mobile agent itineraries for data aggregation on sensor networks[J]. IEEE Transactions on Knowledge and Data Engineering, 2010, 22(12): 1679-1693.
[5] ABDULLA A E A A, FADLULLAH Z M, NISHIYAMA H, et al. An optimal data collection technique for improved utility in UAS-aided networks[C]//INFOCOM 2014. Toronto, Canada, c2014: 736-744.
[6] 蘇金樹, 郭文忠, 余朝龍, 等. 負載均衡感知的無線傳感器網絡容錯分簇算法[J]. 計算機學報, 2014, 37(2): 445-456.
SU J S, GUO W Z, YU C L, et al. Fault-tolerance clustering algorithm with load-balance aware in wireless sensor network[J]. Chinese Journal of Computers,2014,37(2): 445-456.
[7] CHEN M. Towards smart city: M2M communications with software agent intelligence[J]. Multimedia Tools and Applications, 2013, 67(1):167-178.
[8] CHEN M, GONZALEZ S, ZHANG Q, et al. Code-centric RFID systems based on software agent intelligence[J]. IEEE Intelligent Systems, 2010,25(2):12-19.
[9] QI H R, WANG F Y. Optimal itinerary analysis for mobile agents in ad hoc wireless sensor networks[C]//Proceedings of the IEEE, c2001: 147-153.
[10] CHEN M, YANG L T, KWON T, et al. Itinerary planning for energy-efficient agent communications in wireless sensor networks[J]. IEEE Transactions on Vehicular Technology, 2011, 60(7): 3290-3299.
[11] CHEN M, LEUNG V, MAO S.W, et al. Energy-efficient itinerary planning for mobile agents in wireless sensor networks[C]//IEEE International Conference on Communications (ICC'09). Dresden, Germany, c2009: 1-5.
[12] CAI W, CHEN M, HARA T, et al. A genetic algorithm approach to multi-agent itinerary planning in wireless sensor networks[J]. Mobile Networks and Applications, 2011, 16(6): 782-793.
[13] WANG J F, ZHANG Y, CHENG Z L, et al. EMIP: energy-efficient itinerary planning for multiple mobile agents in wireless sensor network[J/OL]. Telecommunication Systems, http://eprints.ucl.ac.uk.
[14] KONSTANTOPOULOS C, MPITZIOPOULOS A, GAVALAS D, et al. Effective determination of mobile agent itineraries for data aggregation on sensor networks[J]. IEEE Transactions on Knowledge and Data Engineering, 2010, 22(12): 1679-1693.
[15] GAVALAS D, MPITZIOPOULOS A, PANTZIOU G, et al. An approach for near-optimal distributed data fusion in wireless sensor networks[J]. Wireless Networks, 2010, 16(5): 1407-1425.
[16] CHEN M, CAI W, GONZALEZ S, et al. Balanced itinerary planning for multiple mobile agents in wireless sensor networks[M].Ad Hoc Networks. Springer Berlin Heidelberg, 2010: 416-428.
[17] HUANG V L, SUGANTHAN P N, LIANG J J. Comprehensive learning particle swarm optimizer for solving multiobjective optimization problems[J]. International Journal of Intelligent Systems, 2006, 21(2): 209-226.
[18] MAO W T, ZHAO S J, MU X X, et al. Multi-dimensional extreme learning machine[J]. Neurocomputing, 2015, 149(4): 160-170.
[19] CLERC M. Discrete particle swarm optimization, illustrated by the traveling salesman problem[M].New optimization techniques in engineering. Springer Berlin Heidelberg, 2004.
[20] 陳敏. OPNET物聯網仿真[M].武漢:華中科技大學出版社. 2015.
CHEN M. OPNET Internet of things simulation[M]. Wuhan: Huazhong University of Science and Technology Press, 2015.
Discrete multi-objective optimization of particle swarm optimizer algorithm for multi-agents collaborative planning
SHI Xiao-bo1,2,3, ZHANG Yin4, ZHAO Shan2, XIAO Deng-ming2
(1. College of Computer and Information Engineering, Henan Normal University, Xinxiang 453007, China; 2. School of Computer Science and Technology, Huazhong University of Science and Technology, Wuhan 430074, China; 3. Engineering Lab of Intelligence Business & Internet of Things, Henan Province, Xinxiang 453007, China; 4. School of Information and Safety Engineering, Zhongnan University of Economics and Law, Wuhan 430073, China)
Although multiple mobile agents (MA) collaboration can quickly and efficiently complete data aggregation in wireless sensor network, the MA carrying data packages extensively increase along with a raise in the number of data source nodes accessed by MA, which causes unbalanced energy load of sensor nodes, high energy consumption of partial source nodes, and shortened lifetime of networks. The existing related works mainly focus on the objective of decreasing total energy consumption of multiple MA, without considering that rapidly energy consumption of partial source nodes has a negative effect on networks lifetime. Therefore, discrete multi-objective optimization of particle swarm algorithm was proposed, which used the total network energy consumption and mobile agent load balancing as fitness function for the approximate optimal itinerary plan in multiple mobile agent collaboration. Furthermore, the simulation result of the proposed algorithm is better than the similar algorithm in total energy consumption and network lifetime.
mobile agent, wireless sensor network, load balancing, lifetime of WSN
TP393
A
10.11959/j.issn.1000-436x.2016113
2015-08-27;
2016-04-05
河南省重點科技攻關基金資助項目(No.132102210483, No.102102210178);河南省基礎與前沿技術研究
項目(No.122300410344);河南省教育廳自然科學研究計劃基金資助項目(No.2008A520013)
Key Science and Technology Program of Henan Province (No.132102210483, No.102102210178), The Foundation and Cutting-edge Technologies Research Program of Henan Province (No.122300410344), Natural Science Research Projects of Department of Education of Henan Province (No.2008A520013)
史霄波(1972-),女,河南焦作人,河南師范大學副教授,華中科技大學博士生,主要研究方向為無線傳感器網絡、機器學習、智能醫療等。
張引(1986-),男,江西九江人,中南財經政法大學講師,主要研究方向為數據挖掘、推薦系統、智能服務等。
趙杉(1993-),男,安徽宿州人,華中科技大學碩士生,主要研究方向為大數據、云平臺等。
肖登明(1989-),男,湖北仙桃人,華中科技大學碩士生,主要研究方向為云計算、大數據分析、數據挖掘。