GA-BP網絡在鑿巖防卡閥推進壓力預測中的應用
2016-07-19 07:09:24馬威馬飛郭榮耿曉光
工礦自動化 2016年7期
馬威, 馬飛, 郭榮, 耿曉光
(北京科技大學 機械工程學院, 北京 100083)
?
GA-BP網絡在鑿巖防卡閥推進壓力預測中的應用
馬威,馬飛,郭榮,耿曉光
(北京科技大學 機械工程學院, 北京100083)
摘要:分析了鑿巖鉆車防卡閥的結構和工作原理,利用某采石場原始卡釬數據,建立了防卡閥BP神經網絡模型。基于遺傳算法理論對BP神經網絡模型進行了結構拓撲優化和訓練,建立了GA-BP網絡模型。分析結果表明,BP神經網絡模型和GA-BP網絡模型均可以較好地預測卡釬時防卡閥的推進壓力,但GA-BP網絡模型具有更高的預測精度、非線性映射和網絡性能。
關鍵詞:鑿巖; 防卡閥; 推進壓力; BP神經網絡; 遺傳算法
網絡出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160705.1500.011.html
0引言
鑿巖鉆車在高速鑿巖時,常有卡釬事故發生,卡釬現象是影響鑿巖效率和鑿巖質量的重要因素。所以,有效的防卡釬裝置對液壓鑿巖鉆車具有非常重要的意義。為此,一些學者對鑿巖鉆車的防卡釬系統展開了研究。吳萬榮等[1]通過對鉆孔偏斜的影響因素及力學特征的分析,建立了鉆頭偏載的力學模型,揭示了鑿巖過程鉆孔偏斜的機理,提出了控制鉆孔偏斜的推進力控制方案。羅生梅等[2]針對3種不同的卡釬現象,提出了基于參數變化率和絕對變化量的綜合卡釬判定方法。趙宏強等[3]利用模糊控制理論,通過AMEsim與Simulink聯合仿真,驗證了根據回轉壓力信號的變化自動控制推進力大小的可行性。
綜上,目前防卡釬研究主要側重于防卡釬系統的整體動態響應特性研究,在一定程度上解決了鑿巖卡釬問題,但由于防卡閥為涉及機械、流體、控制等多個學科領域的復雜物理系統,其可靠性取決于多個物理場的耦合作用,并且非線性較強。因此,建立防卡閥模型,確定影響其性能的關鍵因素及其影響規律,對防卡閥設計至關重要。
針對鑿巖系統中防卡閥相關研究的不足,筆者首先現場實測回轉和推進壓力曲線,在復雜多變的巖石工況下捕捉卡釬現象,并獲取相應的壓力信號;然后建立了防卡閥BP神經網絡模型和遺傳算法優化BP(GA-BP)神經網絡模型,分析了影響防卡閥性能的因素,對實驗數據進行了訓練和測試;最后,對2種模型的實驗結果對比分析,驗證了GA-BP網絡比BP神經網絡具有更高的預測精度、非線性映射和網絡性能。
1防卡閥結構和防卡釬系統原理
防卡釬系統原理[4]如圖1所示,防卡閥的結構及原理如圖2所示。

1-低壓推進溢流閥;2-高壓推進溢流閥;3-發動機;

1-閥座;2-閥芯;3-頂桿;4-簧座;5-擋圈;
在鉆孔時,如果回轉壓力P1超過防卡閥的設定值,則防卡閥的閥芯、頂桿和簧座將會克服彈簧預緊力而被推動,閥芯移動的最大距離由擋圈來限制,此時,控制推進的油壓P就會部分通過防卡閥的節流腔從低壓推進溢流閥流出,推進壓力和速度相應降低,正常情況下就會使回轉壓力下降,并保持在一個相對穩定的數值。根據回轉壓力超過設定值的程度不同,防卡閥的閥芯在關閉和全開位置變動,從而使推進壓力在高壓推進和低壓推進之間平穩變動。根據巖石的具體情況,可通過旋轉調節螺釘來改變彈簧的預壓縮量,設定防卡閥的臨界回轉壓力。
2樣本數據采集和訓練
現場實驗主要考察推進器的推進壓力隨孔內因素變化時的反應特性。由于BP神經網絡模型是建立在大量訓練樣本基礎之上,因此,訓練樣本應該足夠大。將防卡閥應用在某國產露天鑿巖鉆車上,現場實驗時, 在推進油缸的進出油口、鑿巖機回轉發動機的進出油口分別安裝壓力傳感器,經采集模塊連接至計算機測試軟件,測量在鉆孔工作過程中各處壓力的變化情況。
實驗在某采石場進行,測試了鉆孔過程中多個炮孔的有關數據。圖3、圖4為捕捉到卡釬跡象時的推進和回轉壓力訓練和測試曲線。通過局部放大圖可以看到,推進壓力隨回轉壓力的增大而減小,當卡釬現象解除后,推進和回轉即以正常壓力值進行。

(a) 完整鑿巖過程

(b) 卡釬瞬間
實驗測量的訓練和測試樣本分別見表1和表2。
3防卡閥BP神經網絡模型
將卡釬影響因素作為網絡輸入層,卡釬反饋參數作為網絡輸出層,在網絡的輸入層與輸出層之間確定合理的隱含層與連接權,就可以建立起防卡釬系統的BP神經網絡模型。

(a) 完整鑿巖過程

(b) 卡釬瞬間

時間/s回轉壓力/MPa推進壓力/MPa80.404.78557.197380.454.83867.168980.505.09687.233180.556.36397.034280.607.14855.908780.657.94054.800280.708.26374.732180.757.87915.003280.807.68785.9412時間/s回轉壓力/MPa推進壓力/MPa80.857.10466.805680.906.01637.193980.954.90727.152681.004.73047.141681.054.79057.137481.104.71097.140481.154.72557.141481.204.71757.168681.254.74507.1117
3.1BP算法
BP算法將學習過程劃分為2個階段,即信號的正向通信階段和誤差的反向傳播階段。在正向通信階段,信息從輸入層通過隱含層到達輸出層[5]。輸出信號在輸出側形成,網絡的權值在信息傳遞過程中為定值,每一層的神經元狀態只影響下一層的神經元狀態。如果不能在輸出層得到期望輸出值,那么誤差信號將會反向傳播。在反向傳播階段,不能滿足精度要求的誤差信號被每一層共享。根據誤差信號動態地調整連接權值,通過正反向循環調整,使神經元之間權值保持連接。當輸出信號的誤差值滿足精度要求時學習停止[6]。
kolmogorov定理:對于任意連續函數f:Un→Rm,f(X)=Y,假如U處于單位間隔[0,1],那么f可以通過一個3層BP神經網絡精確模擬。

表2 BP神經網絡測試樣本
根據kolmogorov定理,在一定范圍內,用含有一個隱含層的BP網絡可以完成任意n維到m維的映射[7-9]。圖5為具有1個隱含層的BP神經網絡模型[10]。R為輸入層,S1為隱含層,S2為輸出層,IW1.1為輸入層的權值矩陣,LW2.1為從隱含層到輸出層的權值矩陣,n1和n2為神經網絡層數,b1和b2分別為隱含層和輸出層的閾值,f1和f2分別為隱含層和輸出層的神經元傳遞函數。
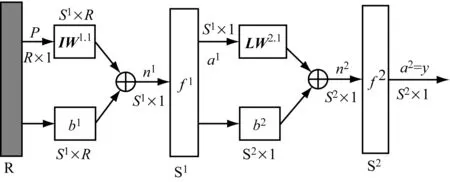
圖5 具有1個隱含層的BP神經網絡
假設輸出層神經元j在時刻t的實際輸出值為yj(t),期望輸出值為dj(t),則網絡的誤差函數E(t)定義如下:
(1)
式中:S2為輸出層S2的神經元個數;ε為預設誤差允許值,當E(t)小于ε時,訓練所得的模型就是所需的網絡模型。
3.2BP網絡結構
BP網絡包含以下3層:
(1) 輸入層神經元。根據防卡閥結構和防卡釬系統原理,將回轉壓力作為模型的輸入層。
(2) 輸出層神經元。盡管大直徑深孔鑿巖過程中引起卡釬的因素十分復雜,但其客觀因素主要是鉆頭推進壓力和鉆孔過程中巖體構造及巖石性質的變化。因此,在建立BP網絡模型時,設模型的輸出層為推進壓力。
(3) 隱含層神經元。隱含層神經元個數沒有理論上的計算公式,只能根據經驗公式來計算[5]:
(2)
式中:S1,R分別為隱含層、輸入層神經元個數,S1=3,4,…,11;a為1~10的常數。
隱含層神經元個數越多,網絡的預測效果越好,但是隱含層神經元個數過多,就會大大增加模型的計算量,嚴重影響網絡的收斂速度。隱含層神經元個數為8時誤差最小,因此本文建構1-8-1的BP神經網絡預測模型。
3.3BP網絡訓練和測試
因為傳統的BP算法為梯度下降法,線性收斂速度比較慢,而LM(Levenberg-Marquardt)算法對傳統BP算法進行了改進,具有全局二階收斂性(只有當Hesse矩陣的二階項趨于零時,才能應用LM算法),運算速度更快。因此,選擇TRAINLM作為網絡的訓練函數。
訓練過程的均方差(Mean Squared Error,MSE)曲線如圖6所示。在訓練次數為535次時,均方差達到10-3。均方差越小,預測值就越接近期望值,但相應的訓練次數會增加,影響網絡訓練的速度,甚至陷入死循環。結合預測結果進行綜合考慮,均方差選為10-3,既可保證預測結果的準確性,又不會影響訓練過程的快速性,具有較高的靈敏度。

圖6 訓練過程的均方差曲線
訓練過程存在一定的隨機性,需要對訓練結果進行檢測以保證其準確性,網絡訓練輸出值和期望值的線性回歸分析如圖7所示,相關系數為0.999 36,擬合度越接近1,表明網絡輸出值對期望值的追蹤效果越好。
4GA-BP網絡
遺傳算法是一種隨機搜尋算法,參考自然選擇、生物進化的遺傳機制,解決非線性搜尋的優化問題[11-12]。

圖7 網絡訓練輸出值和期望值的線性回歸分析
4.1GA-BP網絡實現步驟
GA-BP網絡分為2部分:第1部分是將遺傳算法嵌入神經網絡,在網絡的權值范圍內搜尋最優個體;第2部分把GA搜尋到的最優個體作為網絡的初始權值和閾值,然后直接利用BP算法訓練網絡。具體實現步驟如下:
(1) 編碼和初始化。GA-BP神經網絡的主要目標是優化神經元之間的連接權值和閾值。每個權值和閾值直接用實數表示,相比于二進制編碼,實數編碼方式更加直觀和精確。設種群規模為N,每個個體包含S個基因(連接權重):S=RS1+S1S2+S1+S2。每個實數的范圍設置為[-1,1],得到初始種群P(t)。
(2) 計算種群個體的適應度值。分配初始種群的權值和閾值S到BP網絡,輸入信號向前傳播,計算輸出值和期望值之間的和方差(Sum of Squared Errors,SSE),適應度函數可以表示為SSE的倒數:
(3)
式中:sol為種群的任意個體;oi為第i個輸出神經元的實際輸出;yi為第i個輸出神經元的期望輸出;no為輸出神經元的個數。
實際輸出和期望輸出之間的差異越小,適應度函數的值越大。
(3) 選擇策略。通過計算種群中每個個體的適應度,將個體分類。根據適應度大小順序,決定個體被選擇的可能性,也就是比例選擇法:
(4)
式中:n為神經網絡層數;fi為第i個神經元的傳遞函數。
比例選擇法保證了擁有較大適應度值的個體優先被選擇,但還是有一些小適應度值的個體被選擇。

(5)
(6)
式中:α為每對父本個體產生的隨機數,0<α<1,α≤Pc,Pc為每對父本個體的交叉速率。

(6) 產生新種群。在種群P(t)中插入新的個體,產生新的種群P(t+1)。將新種群個體的連接權值賦給神經網絡,計算新個體的適應度,如果達到預設值,就進入下一步驟,否則繼續進行遺傳操作。
(7) 給BP網絡分配初始權值。將GA搜尋到的最優個體解碼,分配給相應BP網絡的初始連接權值,然后繼續用BP算法訓練網絡,直到和方差達到設定精度或達到最大迭代數,算法終止。
4.2GA-BP網絡模型設計
4.2.1參數設置
為便于比較,設置GA-BP網絡模型的參數與BP網絡相同。初始學習率為0.08,輸入層到隱含層的傳遞函數為tansig,隱含層到輸出層的傳遞函數為purelin,訓練函數為trainlm。
GA-BP網絡的權值用實數表示,用實數編碼法編碼。由于變量本身是實數,所以可不通過解碼,直接計算目標值和適應度值,以加快搜索速度[13]。每一個連接權值通過一個實數直接表示,通過對所有權值和閾值編碼而獲得的位串稱為個體,sol=[s1,s2,…,sL]。對應于個體的每個權值和閾值被稱為基因。所有權值、閾值結合Matlab命令W1,B,W2,S形成實數編碼遺傳算法的染色體,其長度為L=nin+nno+n+no。本文有1個輸入層單元,3個隱含層單元,1個輸出層單元,加上隱含層和輸出層的閾值,每個個體長度為10,每個實數的范圍是[-1,1]。
遺傳算法在進化搜索過程中不用外部信息,只基于適應度函數,所以適應度函數的選擇很重要,直接影響著收斂速率和尋最優解的能力。目標函數是網絡的和方差,為了獲得它的最小值,適應度函數采用誤差函數的倒數。選擇函數采用基于正態分布的序列選擇函數,交叉函數采用算術交叉,變異函數采用非均勻變異。
如果最優個體對應的適應度函數的值滿足精度要求,或達到設置的迭代次數,或最后改變的平均適應度值的范圍小于某個特定值,就結束訓練;同時,設置擁有最大適應度值的個體作為最優解。否則,繼續循環,對現有父本和后代重新排序,選擇擁有最大適應度值的N個個體作為下一代;然后計算適應度并再次訓練,直到滿足終止條件。
4.2.2BP網絡訓練
解碼從遺傳算法中獲得的最優解,并分配到還未訓練的BP網絡中作為初始權值,然后根據BP算法,輸入訓練樣本進行網絡訓練和學習,計算輸出值和期望值之間的誤差。如果誤差大于精度要求,則轉為反向傳播進程,返回誤差信號。同時,根據每一層誤差的大小,調整權值和閾值,直到誤差小于設定值,或達到預設的訓練次數,終止BP算法。保存訓練好的隱含層權值和閾值,作為新的初始權值和閾值,然后對測試樣本進行仿真。
圖8為遺傳算法的適應度變化曲線,當遺傳算法收斂時,適應度值隨著遺傳代數的增加而增大。

圖8 遺傳算法的適應度變化曲線
圖9為遺傳算法的和方差變化曲線,當遺傳算法收斂時,SSE隨著遺傳代數的增加而減小。
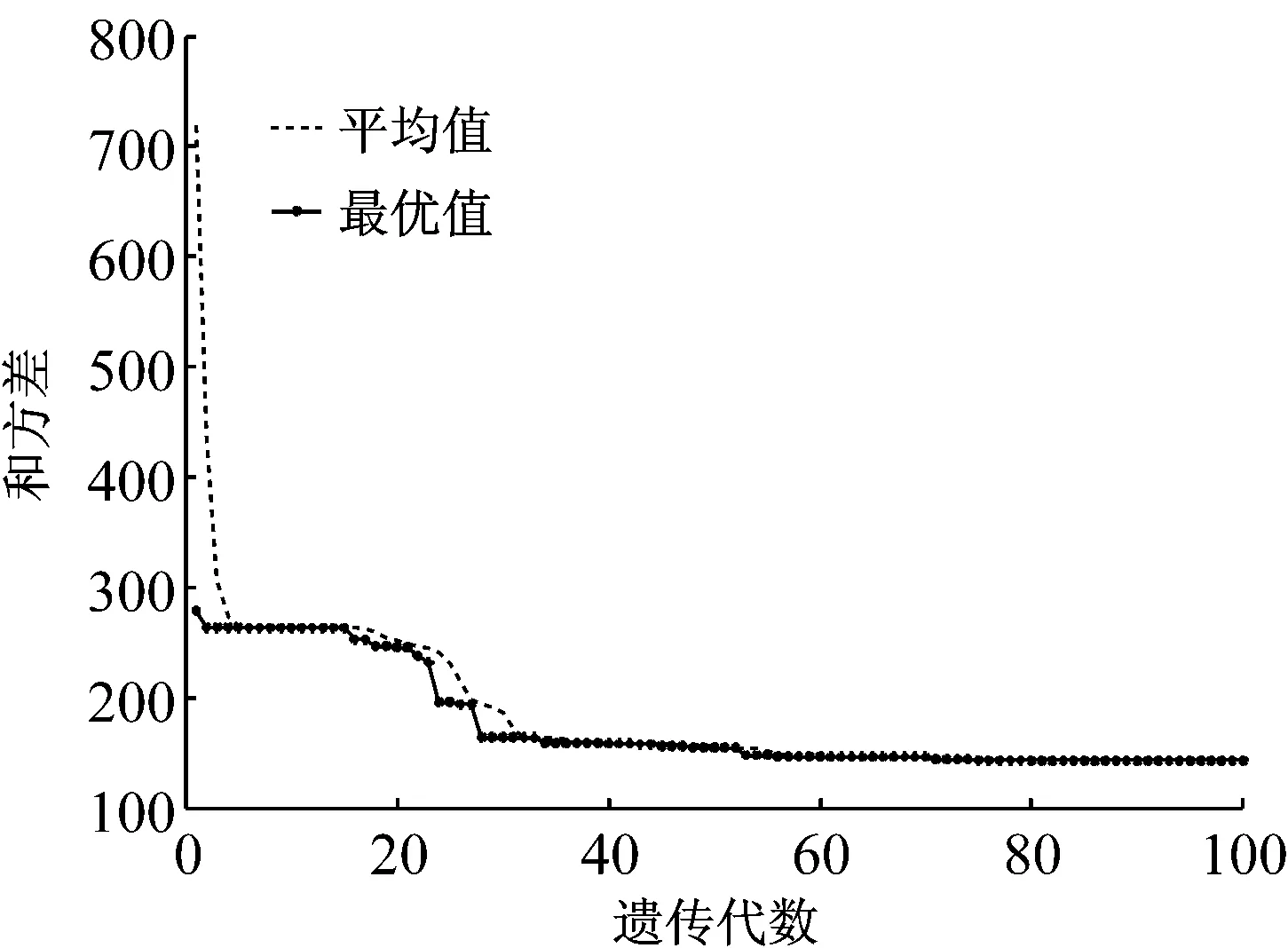
圖9 遺傳算法的和方差變化曲線
5性能分析
圖10為推進壓力的真實值、BP神經網絡模型預測值和GA-BP預測值。從圖10可以看出,BP神經網絡模型和GA-BP網絡模型均可以較好地預測卡釬時防卡閥的推進壓力。

圖10 真實值、BP預測值和GA-BP預測值
為了評價BP神經網絡模型和GA-BP網絡模型的預測精度,采用以下誤差公式[14]:
和方差公式:
(7)
均方差公式:
(8)
平均絕對誤差(Mean Absolute Error,MAE)公式:
(9)
均方根(Root Mean Squared Error, RMSE)公式:
(10)
確定系數公式:
(11)
式中:SST為真實數據和均值之差的平方和。
BP神經網絡和GA-BP網絡對防卡閥推進壓力的預測誤差見表3。可以看出,通過遺傳算法優化后,和方差從1.103 6減小到0.072 0,確定系數從0.945 0增大到0.996 4,說明GA-BP神經網絡的自學習能力要強于沒有經過優化的BP神經網絡,具有相對較高的預測精度、非線性映射和網絡性能。

表3 BP神經網絡模型和GA-BP網絡模型的預測誤差
6結語
介紹和分析了鑿巖防卡閥和防卡釬系統的工作原理,通過現場實測回轉和推進壓力曲線,在復雜多變的巖石工況下捕捉卡釬現象,并獲取相應的壓力信號,建立了防卡閥的BP神經網絡模型。訓練和測試結果表明,隱含層神經元個數取8時,BP神經網絡模型誤差最小,在訓練次數為535次時,均方差達到10-3的要求。建立了防卡閥的GA-BP網絡模型,與沒經過優化的BP網絡模型相比,和方差從1.103 6減小到0.072 0,確定系數從0.945 0增大到0.996 4。分析結果表明,BP神經網絡模型和GA-BP網絡模型均可以較好地預測卡釬時防卡閥的推進壓力,但GA-BP模型網絡具有更高的預測精度、非線性映射和網絡性能。
參考文獻:
[1]吳萬榮,魏建華,張永順,等.大直徑深孔鑿巖鉆孔偏斜的機理及其控制方案[J].中國有色金屬學報,2001,11(1):153-156.
[2]羅生梅,張宏林,斯建剛,等.液壓鑿巖機的自動防卡釬控制方案[J].蘭州理工大學學報,2009,35(3):33-38.
[3]趙宏強,郭艷,吳雙斌.基于模糊控制的潛孔鉆機推進回轉系統仿真[J].計算機仿真,2011,28(8):159-162.
[4]馬威,馬飛,周志鴻.基于AMESim的鑿巖鉆車防卡閥的建模與仿真分析[J].礦山機械,2014,42(11):17-21.
[5]XIE Z,DU Q,REN F,et al.Improving the forecast precision of river stage spatial and temporal distribution using drain pipeline knowledge coupled with BP artificial neural networks: a case study of Panlong River,Kunming,China[J]. Nat Hazards,2015,77(2):1081-1102.
[6]王書濤,陳東營,侯培國,等.基于熒光光譜技術和GA-BP神經網絡的對羥基苯甲酸甲酯鈉含量的測定[J].光譜學與光譜分析,2015,35(6):1606-1610.
[7]賀志勇,鄭偉.基于BP神經網絡的深基坑變形預測[J].華南理工大學學報(自然科學版),2008,36(10):92-96.
[8]王吉權.BP神經網絡的理論及其在農業機械化中的應用研究[D].沈陽:沈陽農業大學,2011.
[9]段寶福,張猛,李俊猛.逐孔起爆震動參數預報的BP神經網絡模型[J].爆炸與沖擊,2010,30(4):401-406.
[10]ZHAO Ying,NAN Jun,CUI Fuyi, et al. Water quality forecast through application of BP neural network at Yuqiao reservoir[J].Journal of Zhejiang University SCIENCE A,2007,8(9):1482-1487.
[11]LI C,YANG Z,YAN H,et al.The application and research of the GA-BP neural network algorithm in the MBR membrane fouling[J].Abstract and Applied Analysis,2014,2014(7):1-8.
[12]劉錦偉,謝雄剛,方井.基于遺傳算法-BP神經網絡的煤層注水效果分析[J].工礦自動化,2016,42(1):48-51.
[13]孟祥逢,魯漢榕,郭玲.基于遺傳神經網絡的相似重復記錄檢測方法[J].計算機工程與設計,2010,31(7):1550-1553.
[14]WANG H S,WANG Y N,WANG Y C.Cost estimation of plastic injection molding parts through integration of PSO and BP neural network[J].Expert Systems with Applications,2013,40(2):418-428.
Application of GA-BP neural network in boost pressure forecast of anti-jamming valve used in rock drilling
MA Wei,MA Fei,GUO Rong,GENG Xiaoguang
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract:Structure and working principle of anti-jamming valve on a drilling rig was analyzed, and BP neural network model of anti-jamming valve was established using original data of a quarry. The theory of genetic algorithm was utilized to optimize and analyze BP neural model, and the GA-BP model was established. The analysis results show that both BP neural network and GA-BP network model can be used to predict boost pressure of anti-jamming valve, and the GA-BP network model has higher prediction accuracy, nonlinear mapping and network performance.
Key words:rock drilling; anti-jamming valve; boost pressure; BP neural network; genetic algorithm
文章編號:1671-251X(2016)07-0044-07
DOI:10.13272/j.issn.1671-251x.2016.07.011
收稿日期:2016-01-27;修回日期:2016-05-20;責任編輯:胡嫻。
基金項目:國家自然科學基金資助項目(51274021)。
作者簡介:馬威(1987-),男,江蘇徐州人,博士研究生,主要研究方向為鑿巖鉆車控制系統等,E-mail:maweiustb@163.com。
中圖分類號:TD422
文獻標志碼:A網絡出版時間:2016-07-05 15:00
馬威,馬飛,郭榮,等.GA-BP網絡在鑿巖防卡閥推進壓力預測中的應用[J].工礦自動化,2016,42(7):44-50.
