門座起重機(jī)臂架系統(tǒng)剛?cè)狁詈蟿恿W(xué)仿真分析
2016-07-19 07:40:16王云哲胡浩亮寧波市特種設(shè)備檢驗(yàn)研究院浙江寧波315600
港工技術(shù) 2016年2期
王云哲,胡浩亮(寧波市特種設(shè)備檢驗(yàn)研究院,浙江 寧波 315600)
?
門座起重機(jī)臂架系統(tǒng)剛?cè)狁詈蟿恿W(xué)仿真分析
王云哲,胡浩亮
(寧波市特種設(shè)備檢驗(yàn)研究院,浙江 寧波 315600)
摘要:面向港口運(yùn)輸業(yè)等領(lǐng)域?qū)﹂T座起重機(jī)的重大需求,本文擬對門座起重機(jī)臂架系統(tǒng)動力學(xué)特性開展研究。針對起重機(jī)臂架系統(tǒng)的變形復(fù)雜性,借助 SolidWorks、ADAMS、ANSYS軟件平臺,運(yùn)用剛?cè)狁詈辖7椒▽﹂T座起重機(jī)臂架系統(tǒng)在不同工況下進(jìn)行動力學(xué)仿真,得到相關(guān)的仿真分析數(shù)據(jù),為實(shí)現(xiàn)門座起重機(jī)臂架系統(tǒng)動態(tài)設(shè)計及優(yōu)化奠定理論基礎(chǔ)。
關(guān)鍵詞:門座起重機(jī);臂架系統(tǒng);剛?cè)狁詈希粍恿W(xué)仿真
引 言
現(xiàn)有的文獻(xiàn)[1~4]表明,門座起重機(jī)臂架系統(tǒng)的設(shè)計大多依靠經(jīng)驗(yàn)法和經(jīng)典靜態(tài)設(shè)計方法,將臂架系統(tǒng)中所有的部件假定為剛體,導(dǎo)致起重機(jī)結(jié)構(gòu)強(qiáng)度具有很大的富裕。此外,組成臂架系統(tǒng)的部件尺寸一般較大,柔性較大,部件的彈性變形對臂架系統(tǒng)動態(tài)性能的影響也不容忽視[5~6],致使如何處理部件位移運(yùn)動和彈性變形二者之間的耦合成為優(yōu)化起重機(jī)設(shè)計所亟待解決的關(guān)鍵問題[7~8]。
針對上述問題,本文以40 t/33 m門座起重機(jī)臂架系統(tǒng)為典型對象,對起重機(jī)臂架系統(tǒng)動力學(xué)特性開展研究。首先,借助三維軟件建立起重機(jī)臂架系統(tǒng)虛擬樣機(jī)。進(jìn)而,運(yùn)用剛?cè)狁詈系慕7椒▽ζ鹬貦C(jī)臂架系統(tǒng)在變幅和變幅+回轉(zhuǎn)這兩種工況下進(jìn)行動力學(xué)仿真。最后,提取所得參數(shù)變化曲線,以此來分析臂架系統(tǒng)運(yùn)動過程中部件間鉸點(diǎn)力的變化情況,并找出鉸點(diǎn)力的最大值和其所對應(yīng)的時間與工況,為將來實(shí)現(xiàn)門座起重機(jī)臂架系統(tǒng)動態(tài)設(shè)計提供理論基礎(chǔ)。
1 臂架系統(tǒng)剛體模型建立
起重機(jī)臂架系統(tǒng)結(jié)構(gòu)型式一般可分為四連桿組合臂架和單臂架式兩類。其中前者應(yīng)用相對廣泛,本文主要研究40 t/33 m門座起重機(jī)四連桿組合臂架系統(tǒng)。整機(jī)性能參數(shù)如表1所示。

表1 門座起重機(jī)性能參數(shù)
由于ADAMS軟件的三維建模功能相對較弱,借助 SolidWorks軟件建立臂架系統(tǒng)各部件剛體模型并裝配,以.x_t為后綴的Parasolid格式將模型導(dǎo)入ADAMS中,建立門起重機(jī)臂架系統(tǒng)在ADAMS中的多剛體虛擬樣機(jī)如圖1所示。

圖1 起重機(jī)臂架系統(tǒng)剛體模型
2 臂架系統(tǒng)剛?cè)狁詈夏P徒?/h2>
剛性體和柔性體并沒有絕對的界限,一般的劃分原則是:變形小、剛度強(qiáng)的構(gòu)件假定為剛體,變形大、剛度差的構(gòu)件假定為柔性體。結(jié)合本文研究所關(guān)心的問題和實(shí)際的工程情況,相對于其他構(gòu)件,象鼻梁受力比較復(fù)雜、變形比較大,故選擇將臂架系統(tǒng)中象鼻梁設(shè)定為柔性體,其他組成構(gòu)件假定為剛體。這樣方便觀察象鼻梁結(jié)構(gòu)件的剛度和動態(tài)特性。
2.1 象鼻梁模態(tài)分析
為生成象鼻梁柔性體,將SolidWorks中象鼻梁的剛體模型通過轉(zhuǎn)化成.x_t文件并導(dǎo)入ANSYS中建立有限元模型,根據(jù)模態(tài)分析的有限元法,利用ANSYS軟件對象鼻梁進(jìn)行模態(tài)分析。由振動理論可知,較低階固有頻率所對應(yīng)的振型對系統(tǒng)的振動過程起主要作用。此外,由于結(jié)構(gòu)中存在阻尼等因素,高頻所對應(yīng)的振型將迅速衰減,所以沒有必要求解太高階的頻率。本文求解象鼻梁前四階模態(tài)參數(shù),并提取固有頻率和對應(yīng)的振型如圖2所示。

圖2 象鼻梁模態(tài)分析
由圖2可知,前三階固有頻率對應(yīng)的振型在變幅平面和回轉(zhuǎn)平面內(nèi)擺動;第四階固有頻率對應(yīng)的振型開始出現(xiàn)扭擺。因此,可認(rèn)為前三階動態(tài)特性是象鼻梁的基頻,對整機(jī)的起升、變幅和回轉(zhuǎn)運(yùn)動產(chǎn)生較大的影響。
2.2 剛?cè)狁詈辖?/p>
根據(jù)上述分析,導(dǎo)出ADAMS所需的前三階模態(tài)的中性文件MNF,替換ADAMS中象鼻梁剛性體,生成臂架系統(tǒng)剛?cè)狁詈夏P腿鐖D3所示。

圖3 門座起重機(jī)剛?cè)狁詈夏P?/p>
3 門座起重機(jī)動力學(xué)仿真分析
在軟件ADAMS環(huán)境中,對40 t/33 m型門座起重機(jī)臂架系統(tǒng)剛?cè)狁詈夏P吞砑域?qū)動、約束和力。臂架系統(tǒng)中各構(gòu)件主要以相對轉(zhuǎn)動為主,因此添加旋轉(zhuǎn)副約束。具體情況如下:臂架和小拉桿、臂架和轉(zhuǎn)臺、臂架和象鼻梁之間各添加一個旋轉(zhuǎn)副;大拉桿和平衡梁、大拉桿和象鼻梁之間各添加一個旋轉(zhuǎn)副。分別在變幅和變幅+回轉(zhuǎn)兩種工況進(jìn)行動力學(xué)仿真,提取象鼻梁鉸點(diǎn)處受力曲線。
3.1 變幅過程
起重機(jī)變幅過程是通過齒輪齒條驅(qū)動實(shí)現(xiàn)的。如圖4所示,在ADAMS中通過對臂架施加轉(zhuǎn)速驅(qū)動,具體加載函數(shù)表達(dá)式為:
step(time,0,0d,2,-90d)+step(time,40,0d,17,90d)

圖4 臂架系統(tǒng)變幅運(yùn)動仿真過程
門座起重機(jī)變幅過程中,臂架系統(tǒng)中臂架與象鼻梁鉸點(diǎn)受力變化曲線如圖5所示。由圖5中可知,起重機(jī)象鼻梁鉸點(diǎn)力最小約為250 t。啟動時,由于重物具有水平慣性力,使鉸點(diǎn)力達(dá)到300 t。當(dāng)變幅結(jié)束時,鉸點(diǎn)力會繼續(xù)變化,直至重物擺動結(jié)束。
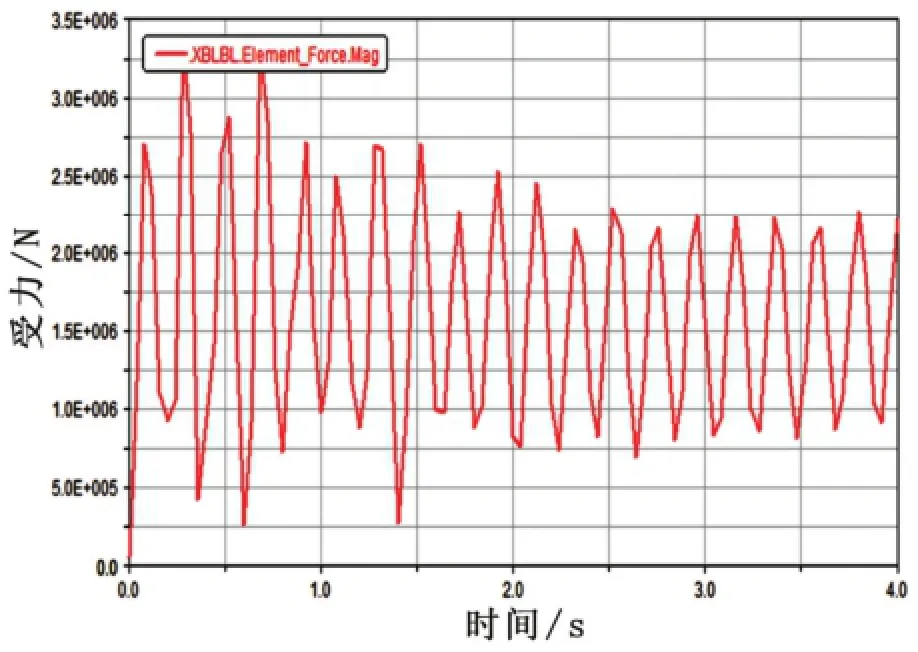
圖5 變幅過程中臂架與象鼻梁鉸點(diǎn)受力曲線
門座起重機(jī)變幅過程中,臂架系統(tǒng)中大拉桿與象鼻梁鉸點(diǎn)受力變化曲線如圖6所示,由圖6中可知,啟動時,鉸點(diǎn)力達(dá)到了最大值,隨著幅度變化,鉸點(diǎn)力會逐漸減小。當(dāng)變幅結(jié)束時,重物的偏擺使鉸點(diǎn)力在50~150 t之間變化。

圖6 變幅過程中大拉桿與象鼻梁鉸點(diǎn)受力曲線
3.2 變幅+回轉(zhuǎn)過程
回轉(zhuǎn)運(yùn)動是通過添加在機(jī)器房與大地的轉(zhuǎn)動副上驅(qū)動實(shí)現(xiàn)的。如圖7所示,起重機(jī)處于最大幅度33 m,回轉(zhuǎn)速度為1.25 r/min。通過一個step函數(shù),模擬回轉(zhuǎn)運(yùn)動的啟動、運(yùn)動、制動過程,同樣要控制鋼絲繩的偏擺角度。函數(shù)表達(dá)式為:
step(time,0,0d,4,-9d)+step(time,50,0d,8,9d)

圖7 臂架系統(tǒng)變幅+回轉(zhuǎn)運(yùn)動仿真過程
變幅+回轉(zhuǎn)過程中臂架與象鼻梁鉸點(diǎn)的受力變化曲線如圖8所示。由圖8可知,鉸點(diǎn)力在最大幅度時約為350 t;啟動時,由于物品的水平慣性力,會使鉸點(diǎn)力突變達(dá)到400 t;當(dāng)變幅結(jié)束時,由于重物的擺動,鉸點(diǎn)力會繼續(xù)變化。

圖8 變幅+回轉(zhuǎn)過程臂架上鉸點(diǎn)受力
變幅+回轉(zhuǎn)過程中大拉桿與象鼻梁鉸點(diǎn)的受力變化曲線如圖9所示。由圖9可知,鉸點(diǎn)的力在最大幅度時約為300 t,隨著幅度的減小,鉸點(diǎn)力很快衰減;當(dāng)變幅結(jié)束時,物品的偏擺使鉸點(diǎn)力在75 ~125 t之間變化。

圖9 變幅+回轉(zhuǎn)過程大拉桿與象鼻梁鉸點(diǎn)受力
通過ADAMS的后處理功能,可形象的展示出不同工況下、不同時刻鉸點(diǎn)力的變化情況。基于動力學(xué)仿真,可知在臂架系統(tǒng)運(yùn)動過程中,鉸點(diǎn)力的大小主要受起重機(jī)自重、貨物偏擺載荷、風(fēng)載荷和慣性載荷等因素的影響。變幅仿真過程中,臂架與象鼻梁鉸點(diǎn)、大拉桿與象鼻梁鉸點(diǎn)的最大值出現(xiàn)在最大幅度位置;而在變幅+回轉(zhuǎn)聯(lián)合仿真的過程中,最大力出現(xiàn)在啟制動、偏擺角最大時。
4 結(jié) 論
本文以40 t/33 m門座起重機(jī)臂架系統(tǒng)為研究對象,基于有限元素法和機(jī)械動力學(xué)理論,借助Solidworks、ANSYS軟件,完成了臂架系統(tǒng)中象鼻梁的模態(tài)分析。在此基礎(chǔ)上,建立臂架系統(tǒng)的剛?cè)狁詈咸摂M樣機(jī)模型,以ADAMS軟件為平臺,在變幅和變幅+回轉(zhuǎn)兩種工況下,對臂架系統(tǒng)進(jìn)行動力學(xué)仿真分析,提取臂架系統(tǒng)關(guān)鍵部件象鼻梁鉸點(diǎn)的瞬態(tài)動力學(xué)響應(yīng)曲線圖,并對曲線圖各個階段進(jìn)行了分析,其仿真結(jié)果與臂架系統(tǒng)的實(shí)際受力相比,吻合度較高。此研究方法可為門座起重機(jī)臂架系統(tǒng)設(shè)計提供借鑒,同時,也為起重機(jī)強(qiáng)度校核提供一種新的思路。
參考文獻(xiàn):
[1] 李平,吳愛京,郭煒.MQ1625門座起重機(jī)門架結(jié)構(gòu)動力學(xué)分析[J].裝備制造技術(shù),2015,13(2):112-116.
[2] 龔蘇生,徐長生.門座起重機(jī)剛?cè)狁詈蟿恿W(xué)仿真研究[J].武漢理工大學(xué)學(xué)報:交通與工程版,2012,36(2):419-423.
[3] 上海港機(jī)重工有限公司.港口起重機(jī)設(shè)計規(guī)范[M]北京:人民交通出版社,2003.
[4] 全國起重機(jī)械標(biāo)準(zhǔn)化技術(shù)委員會.B/T3811-2008起重機(jī)設(shè)計規(guī)范[S].北京:中國標(biāo)準(zhǔn)出版社,2008.
[5] 李文杰,楊艷芳.虛擬樣機(jī)技術(shù)在門座起重機(jī)設(shè)計中的應(yīng)用.武漢:湖北工業(yè)大學(xué)出版社,2009.
[6] 鄭見粹.港口多用途門座起重機(jī)綜述[J].港口裝卸,2000.
[7] 胡曉光,隋允康,丁克勤.基于虛擬樣機(jī)的門式起重機(jī)動力學(xué)仿真分析.北京:科學(xué)導(dǎo)報,2010.
[8] 李獻(xiàn)杰.門座起重機(jī)組合臂架系統(tǒng)強(qiáng)度和動力學(xué)分析[D].大連交通大學(xué),2008.
Dynamic Simulation Analysis on Rigid-flexible Coupling of Portal Crane Boom System
Wang Yunzhe,Hu Haoliang
(Ningbo Special Equipment Inspection Institute, Ningbo Zhejiang 315600, China)
Abstract:Portal crane is urgently required in the field of port transportation etc., now an analysis is made for the dynamic characteristic of boom system adopted by portal crane.For deformation complexity of the boom system,a rigid-flexible coupling model has been established by relying on Solid Works, ADAMS and ANSYS software to carry out dynamics simulation of portal crane boom system under different work conditions.Relevant simulation analysis data are obtained, which serve as a theoretical foundation for realizing the dynamic design and optimization of portal crane boom system.
Key words:portal crane; boom system; rigid-flexible coupling; dynamic simulation
中圖分類號:U653.921
文獻(xiàn)標(biāo)識碼:A
文章編號:1004-9592(2016)02-0020-04
DOI:10.16403/j.cnki.ggjs20160205
收稿日期:2015-05-06
作者簡介:王云哲(1988-),男,本科,主要從事特種設(shè)備檢驗(yàn)與研究等。
