車輛半主動懸掛模型跟蹤滑模控制系統仿真
2016-07-21 06:11:54盧權
現代機械 2016年3期
盧 權
(中國中車唐山機車車輛有限公司,河北唐山063030)
?
車輛半主動懸掛模型跟蹤滑模控制系統仿真
盧權
(中國中車唐山機車車輛有限公司,河北唐山063030)
摘要:針對鐵路車輛橫向振動穩定性控制問題,對安裝有磁流變減振器的鐵路車輛,設計了一種基于跟蹤理論的滑模變結構控制器。運用數值仿真軟件,對以天棚阻尼控制器為參考模型的模型跟蹤滑模控制器系統進行數學仿真,數學仿真結果表明: 模型跟蹤滑模控制器具有良好的振動控制效果。
關鍵詞:半主動懸架天棚阻尼控制模型跟蹤變結構控制
0引言
隨著我國鐵路的不斷提速,尤其是近年來高速動車組車輛的普遍運用,車輛的橫向平穩性振動控制更加顯得尤為重要。
針對鐵路車輛橫向振動平穩性問題,本文設計了一種基于跟蹤理論的滑模控制器,選用天棚阻尼控制器為參考模型,模型與被控系統的約束條件相同,因此具有理想的狀態匹配。通過進行數學仿真驗證,驗證結果表明該控制器有效抑制了車體的橫向振動。

圖1 車輛模型
1半主動懸掛系統車輛模型
本文研究對象如圖1所示,是以鐵路車輛橫向擺動為對象模型的半主動控制懸掛系統。模型主要有車體橫移(x2)、轉向架橫移(x1)2個方向位移。
磁流變減振器采用修正Bouc-Wen模型,減振器阻尼力為Bouc-Wen滯變阻尼力與粘滯阻尼力之和,減振器阻尼力表達式[1-2]:
(1)

磁流變減振器半主動懸掛車輛系統動力學方程為:
(2)
天棚阻尼控制車輛系統動力學方程為:
(3)
其中:k1為每臺轉向架二系彈簧的橫向剛度;k2為每臺轉向架一系彈簧的橫向剛度;m1為轉向架質量;m2為車體質量;h1為二系彈簧中心到車體重心的高度;h2為磁流變減振器到車體重心的高度;2b為二系彈簧的橫向間距;xr為軌道橫向不平順;csky為天棚阻尼系數。
由式(2),得系統狀態方程為:

(4)
y=Cx
(5)

2半主動懸掛模型跟蹤滑模控制器
2.1模型跟蹤控制的匹配條件
考慮線性控制系統[3-4]:
(6)
參考模型系統:
(7)
當系統系數矩陣滿足:
rank{Bp(Am-An)}=rank(BpBm)=rank(Bn)
(8)
存在up=K1Xp+K2um+K2Kme使得方程有解。同時由于(AmBm)可控,因此存在一個矩陣Km使得(Am-BmKm)有負實部的特征根。
2.2模型跟蹤滑模控制器設計
當半主動懸掛系統和天棚阻尼系統的系數矩陣滿足式(8)條件時,可以求解得出up從而使得跟蹤問題有解。將方程(2)及方程(3)的狀態方程系數矩陣代入跟蹤條件(8)中,求得半主動懸掛系統和天棚阻尼系統的系數矩陣滿足跟蹤條件(8)。故半主動懸掛系統和天棚阻尼滿足模型跟蹤匹配條件。
在控制模型和參考模型滿足模型跟蹤匹配條件下,假設[5-7]:
切換函數S=Gy
將半主動懸掛系統和天棚阻尼系統狀態方程系數矩陣代入方程:
得誤差的狀態方程:
將半主動懸掛系統和天棚阻尼系統狀態方程系數矩陣代入誤差的模態方程:
得到誤差的滑動模態方程為:
經驗證各系數矩陣均滿足滑動模態關于干擾的不變性及匹配性。因此跟蹤條件(8)下的誤差滑動模態方程可簡化為:
用極點配置法可求得滑模面系數矩陣G,即可求得切換面S=Gy。

=-ks-εsign(s)
解得:
Fd=(GBp)-1{G[Ame+(Am-Ap)Xp+Bmu(t)]+ks+εsign(s)}
通過調整式中的參數k和ε,將式中ε變小即可以減小慣性作用從而削弱系統抖振,但當系統趨近模態(s≠0)動態品質時,數值可能變大,這時可以通過增大式中k值來保證狀態快速到達切換面。
3半主動模型跟蹤滑模控制系統仿真
仿真選用MATLAB/SIMULINK軟件,對以天棚阻尼控制系統為參考的跟蹤滑模控制器進行數值仿真,仿真參數如下[8-9]:
m1=30 kg,k2=230 kN/m,m2=30.2 kg
k1=18.0 kN,b=0.2 m,h1=0.196
h2=0.2 m,csky=200 N·s/m
取軌道方向不平順激勵為正弦掃頻信號,振幅為3 mm。
以天棚控制作為參考模型的滑模變結構控制器的仿真模塊圖如圖2所示[10]。
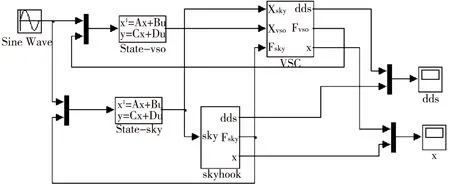
圖2 以天棚阻尼控制為參考模型的滑模跟蹤控制系統仿真圖
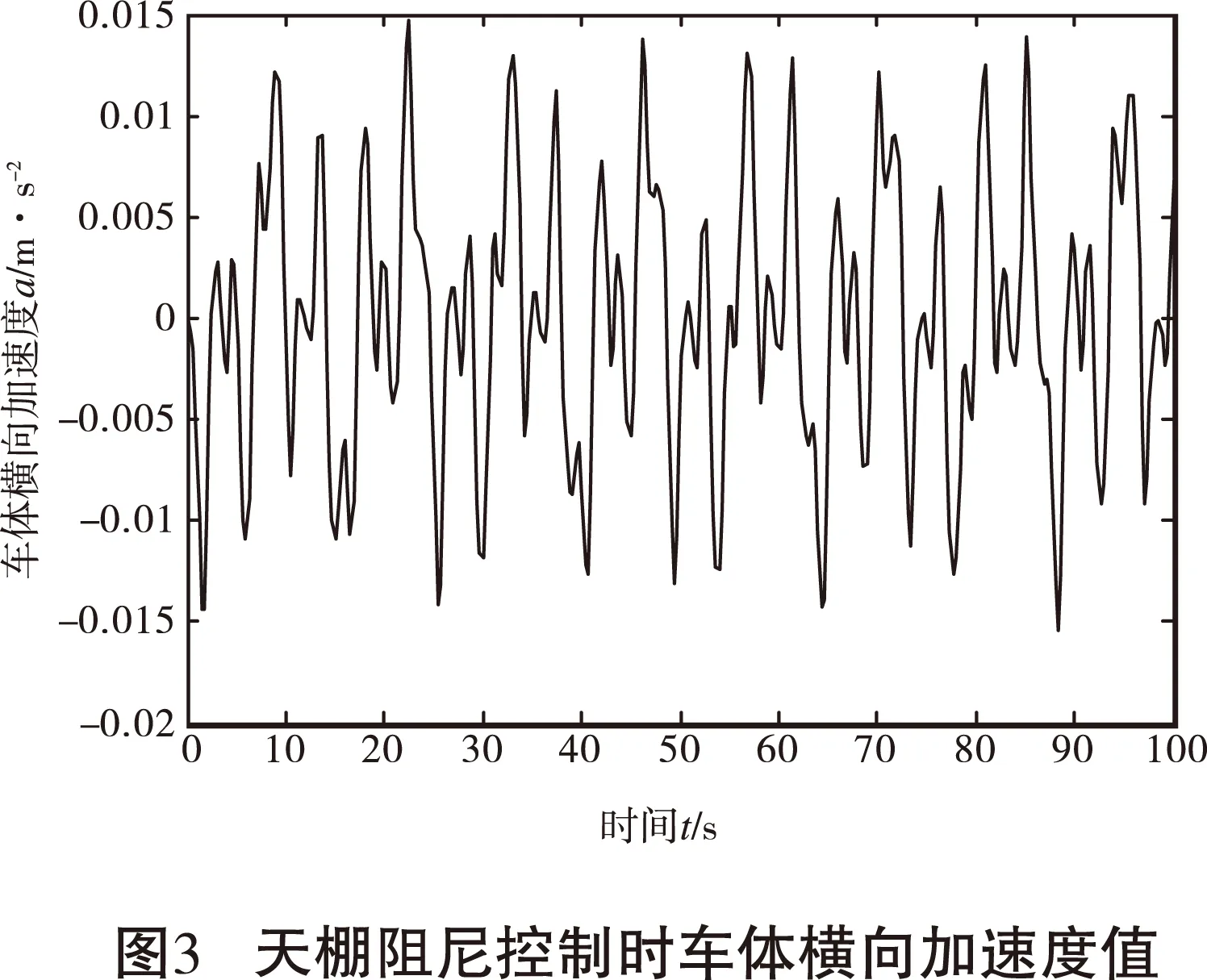
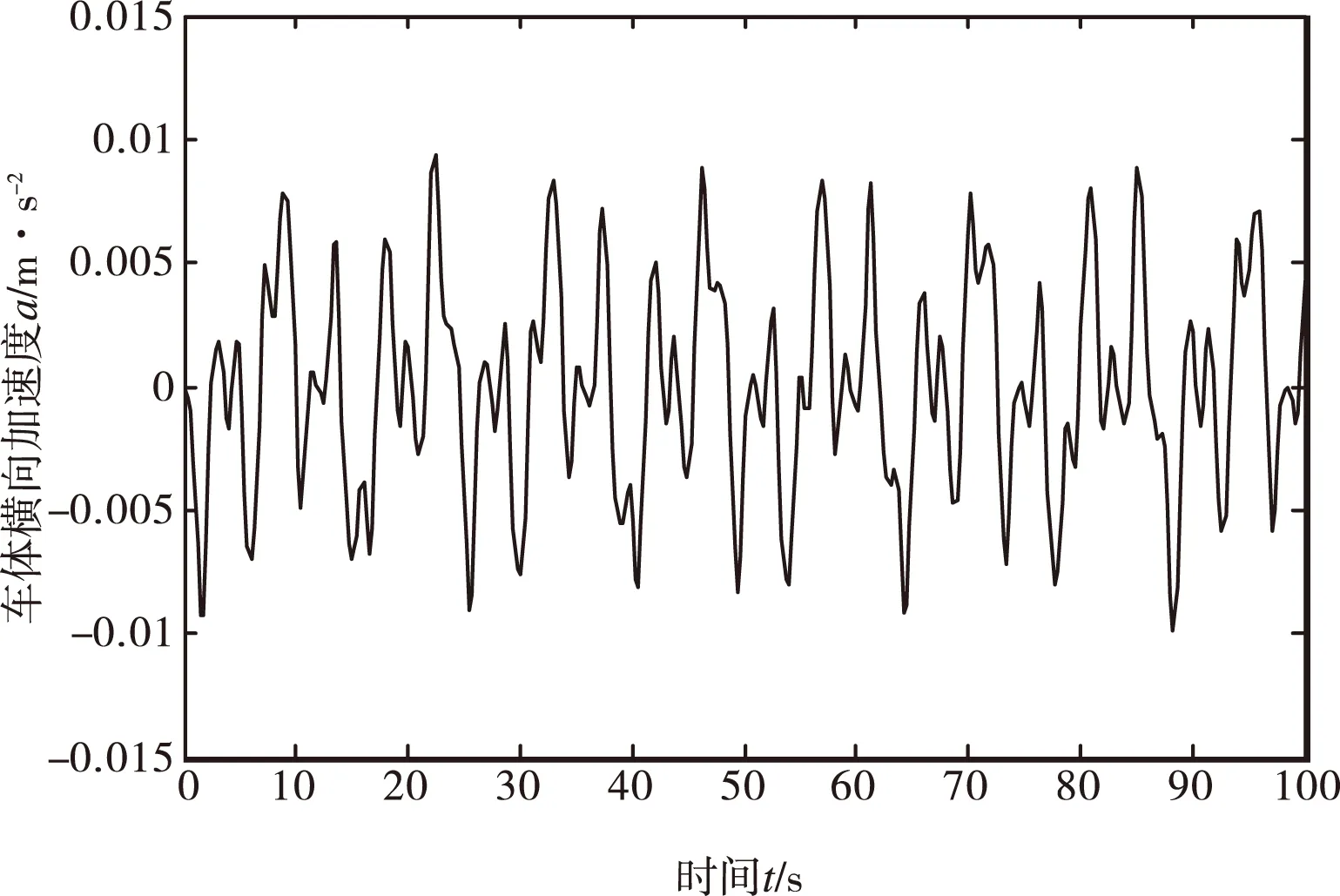
圖4 模型跟蹤滑模控制時車體橫向加速度值
由圖3、圖4的仿真結果我們可以得出:由于對誤差進行了控制,被控模型能夠有效地跟蹤參考模型,使得兩模型之間的誤差始終保持在一個比較小的范圍內,因此可以得出控制是有效的。
4結論
對帶有磁流變減振器的鐵路車輛橫向半主動懸掛系統設計了一個跟蹤天棚阻尼器的滑模變結構跟蹤控制器,通過仿真得出模型跟蹤滑模變結構控制器具有較高的魯棒性,對車輛具有良好的振動控制效果。
參考文獻
[1]高國生,楊紹普,等. 基于磁流變阻尼器的機車橫向懸掛半主動控制研究[J]. 功能材料,2006(37)802-804.
[2]倪建華,張智謙,張可,等.一種新型的磁流變阻尼器及其在半主動控制車輛懸架中的應用[J].機械科學與技術,2004,23(1):4-6.
[3]高為炳.變結構控制理論與應用[M].北京:中國科學出版社,1990.
[4]黃忠霖.控制系統MATLAB計算及仿真[M].北京:國防工業出版社,2001.
[5]趙成,胡增榮,陳大躍.半主動懸架的滑模變結構控制[J].中國公路學報,2007,20(3):109-114.
[6]趙成,陳大躍.電流變智能半主動懸架的輸出反饋變結構控制[J].農業機械學報,2007,38(8):5-10.
[7]王亮,任傳波,趙真,孫林. 車輛主動懸架的模型跟蹤變結構控制研究[J].山東理工大學學報,2009,23(2):19-23.
[8]楊金霞,陳寧,姚嘉伶,蔡偉義. 車輛非線性半主動懸架的模型跟蹤變結構控制[J].南京林業大學學報,2007(1)42-46.
[9]鄭玲,鄧兆祥,李以農.汽車半主動懸架的滑模變結構控制[J].振動工程學報,2003,04(2):457-462.
[10]胡躍明.變結構控制理論與應用[M].北京:科學出版社,2003.
中圖分類號:U463.33
文獻標識碼:A
文章編號:1002-6886(2016)03-0021-04
作者簡介:盧權(1983-),男,江西高安人,碩士研究生,工程師,研究方向:車輛系統動力學。
收稿日期:2015-10-26
Simulation of the model-following slip form control system for semiactive suspension in vehicles
LU Quan
Abstract:In order to solve the problem of lateral stability control of railway vehicles, we designed a model-following-based slip form variable structure controller for the railway vehicle with magnetorheological damper. Using MATLAB/SIMULINK software, we carried out mathematical simulation of the model-following slip form controller with the ceiling damping controller as reference model. The results showed that the model-following slip form controller had good control effect.
Keywords:semiactive suspension; ceiling damping control; model-following variable structure control
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
