一種基于STD的Buck變換器滑模控制
2016-07-25 02:44:52皇甫宜耿卓生榮王小飛蔣康博
西北工業(yè)大學(xué)學(xué)報 2016年4期
皇甫宜耿, 卓生榮, 王小飛, 蔣康博
?
一種基于STD的Buck變換器滑模控制
皇甫宜耿1, 卓生榮1, 王小飛2, 蔣康博3

摘要:針對新能源用DC-DC Buck變換器常規(guī)滑模控制需要同時檢測變換器輸出電壓和濾波電容電流,提出一種基于super-twisting微分器(STD)的滑模控制器。與常規(guī)滑模控制器相比,所提出的控制方法只需檢測變換器輸出電壓,無需測量電容電流,因此可以將電流傳感器從控制環(huán)路中移除,從而簡化控制系統(tǒng)。仿真實驗結(jié)果表明,與常規(guī)滑模控制器相比,所提出的STD滑模控制具有更小的穩(wěn)態(tài)誤差,同時保留了對輸入電壓擾動和輸出負載擾動的強魯棒性。
關(guān)鍵詞:DC-DC Buck變換器;super-twisting控制器;滑模微分器
在交通電氣和新能源發(fā)電領(lǐng)域,DC-DC變換器發(fā)揮著越來越重要的作用。在這些應(yīng)用中,負載需求和電源輸入往往具有隨機性和不確定性特征。這對DC-DC變換器的控制提出了要求:在輸入電壓和負載擾動的情況下也要實現(xiàn)電壓平滑輸出。傳統(tǒng)PI控制算法簡單,穩(wěn)定可靠,廣泛應(yīng)用于工程實際中。但其動態(tài)響應(yīng)較慢,不能很好地解決這個問題。因此有必要采用先進的非線性控制策略。最早用于變結(jié)構(gòu)系統(tǒng)(VSS)的非線性滑模控制[1],具有結(jié)構(gòu)簡單、對內(nèi)部參數(shù)和外部擾動均不敏感的強魯棒性等優(yōu)點。功率器件的開關(guān)特性使得電力電子變換器可被視為VSS,因此使用滑模控制擾動下的DC-DC變換器是可行的[2]。
近年來,很多文獻對DC-DC變換器的滑模控制進行了研究。文獻[2-3]針對基本DC-DC變換器(包括Buck、Boost和Buck-Boost)滑模控制進行了研究,提出了簡單可行的設(shè)計步驟,并使用模擬器件實現(xiàn)控制器。通常來說,滑模控制可分為到達階段和滑模階段。文獻[4-5]提出一種全局滑模控制器,消除了到達階段,使得從初始位置就進入滑模階段,提高了變換器全局魯棒性。文獻[6]針對Buck-Boost變換器提出一種基于super-twisting算法的數(shù)字式滑模控制器。擾動下的實驗結(jié)果表明,與PI控制相比,滑模控制具有更強的魯棒性。文獻[7]針對Buck變換器提出了一種PCL(prescribed convergence loaw)滑模控制器,可以改善傳統(tǒng)滑模控制非零穩(wěn)態(tài)誤差的問題。
一般來說,相對階數(shù)為2的系統(tǒng)滑模控制需要2個測量量。以Buck變換器為例,以輸出電壓為滑模變量時,需要同時測量輸出電壓和輸出側(cè)濾波電容電流[7]。注意到對于DC-DC變換器來說,輸出電容電流與輸出電壓對時間的導(dǎo)數(shù)相關(guān)。因此當以輸出電壓為滑模變量時,輸出電容電流可用微分器觀測得到。這樣,電流傳感器就可以從控制環(huán)路中移除。為獲得更好的變換器輸出性能,使用的微分器應(yīng)該是越準確越好。實際應(yīng)用中,微分器輸入側(cè)通常含有測量噪聲,因此不能使用傳統(tǒng)的線性高增益觀測器。
針對電壓平滑輸出的DC-DC Buck變換器,提出一種基于Super-Twisting微分器(super-twisting differentiator,STD[8])的滑模控制器。與典型滑模控制器相比,所提出的控制方法只需檢測變換器輸出電壓,不需要電流傳感器,同時保留了滑模控制的魯棒性。
1Buck變換器建模
Buck變換器的基本結(jié)構(gòu)如圖1所示,其中S是功率開關(guān)器件(MOSFTET),D是功率二極管,L、C分別是濾波電感和濾波電容,R是負載。vin和vo分別代表變換器輸入和輸出電壓,Vref是輸出參考電壓;iL、iC和io分別表示流過電感、電容和負載的電流。注意在滑模控制下,圖中開關(guān)器件控制信號u的頻率是變化的。Buck變換器的平均模型可表示為[9]
(1)
令x1=vo-Vref,則(1)可改寫為
(2)

圖1 Buck變換器滑模控制基本結(jié)構(gòu)
2基于super-twisting的微分器
super-twisting滑模控制率形式如(3)式所示[10]
(3)
式中,u為控制率,u1為中間變量,σ為滑模變量,λ0和λ1為常數(shù),sign(·)為符號函數(shù),定義如下

(4)
根據(jù)(4)式,輔助系統(tǒng)可以重新寫為
(5)
式中,z1為中間變量。根據(jù)(4)式、(5)式,輸入信號的微分可表示為
(6)

(7)
3滑模控制器設(shè)計
文獻[2]給出了簡單可行的DC-DC變換器滑模控制設(shè)計步驟,首先控制率要滿足到達條件;其次要滿足存在條件和穩(wěn)定條件。到達條件可以確保系統(tǒng)軌跡最終會趨向滑模面,但不能保證可以一直保持在滑模面上,所以還需要滿足存在條件。
(8)
為確保系統(tǒng)相頻面軌跡保持在滑動面上,系統(tǒng)必須滿足由李雅普諾夫第二方法推導(dǎo)出的存在條件,它決定了系統(tǒng)的漸進穩(wěn)定性。系統(tǒng)的存在條件為
(9)
(10)
式中,R為負載電阻,L和C分別為濾波電感和濾波電容,Vi為輸入電壓,Vref為輸出參考電壓。
根據(jù)文獻[3],為獲得最大的滑模存在區(qū)域,同時又不出現(xiàn)電壓超調(diào)現(xiàn)象,α最大取值為1/RC。
當系統(tǒng)軌跡在滑模面上運動時,有S=0成立。此時
(11)
解出x1,有
(12)
式中,t0為任意時刻,x1(t0)為t0時刻的電壓偏差。
從(11)式可以看出,為使得x1(t)→0(即vo→Vref),α取值必須為正數(shù)。且時間常數(shù)α越大,x1(t)→0速度越快。
根據(jù)以上分析,最終α取值為1/RC。滑模面可表示為
(13)
式中,iC為流過輸出電容電流。
(8)式控制率可表示為
(14)
式中,S為滑模面,sign(·)為符號函數(shù),u為控制量。
注意到(13)式中因子1/C不會影響滑模面S的符號特性,因此為避免S值過大,在實際應(yīng)用中可以將滑模面簡化為
(15)
4基于STD的滑模控制
根據(jù)(13)式、(14)式,滑模控制可表示為
(16)

根據(jù)(6)式,基于STD估計的滑模變量σ的一階導(dǎo)數(shù)可表示為
(17)
式中上標(~)表示估計值,z1為中間變量。

由于STD的估計值能夠有限時間收斂到真實值,滿足分離定律[12],因此可以分別設(shè)計STD微分器和滑模控制器。最終基于STD的滑模控制的控制率可表示為
(18)
5仿真結(jié)果與分析
為驗證算法的可行性和魯棒性,基于圖1a)、圖1b)在Simulink上搭建了2個仿真模型,常規(guī)滑模控制(SMC)和基于STD的滑模控制(STD-SMC)。SMC要同時測量變換器輸出電壓和電容電流,而STD-SMC僅需測量變換器輸出電壓。Buck變換器輸入電壓Vin為8~15 V,輸出參考電壓Vref為5 V,電感L取值2 mH,輸出電容C取值4 700 uF,負載R取值2.5~10 Ω;STD的參數(shù)λ0和λ1分別取值-2×106,-2×103;滑模控制器α取值為85。設(shè)置求解器為Euler法,仿真步長為1×10-5。為詳細對比SMC和STD-SMC的控制效果,分別在穩(wěn)態(tài)、動態(tài)響應(yīng)、輸入電壓擾動和輸出負載擾動4種情況進行分析。
5.1穩(wěn)態(tài)性能測試
在不同輸入電壓和負載電阻下,變換器輸出的平均電壓分別如圖2、圖3所示。從中可以看出本文所提出的STD-SMC與SMC相比,電壓調(diào)整能力和負載調(diào)整能力更強,且具有更小的輸出電壓穩(wěn)態(tài)誤差。
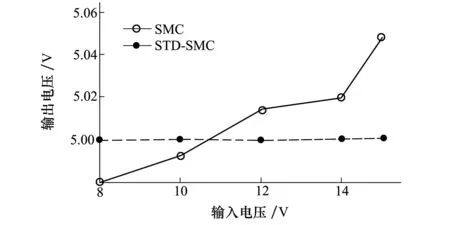
圖2 Buck變換器電壓調(diào)節(jié)(負載R=2.5 Ω)
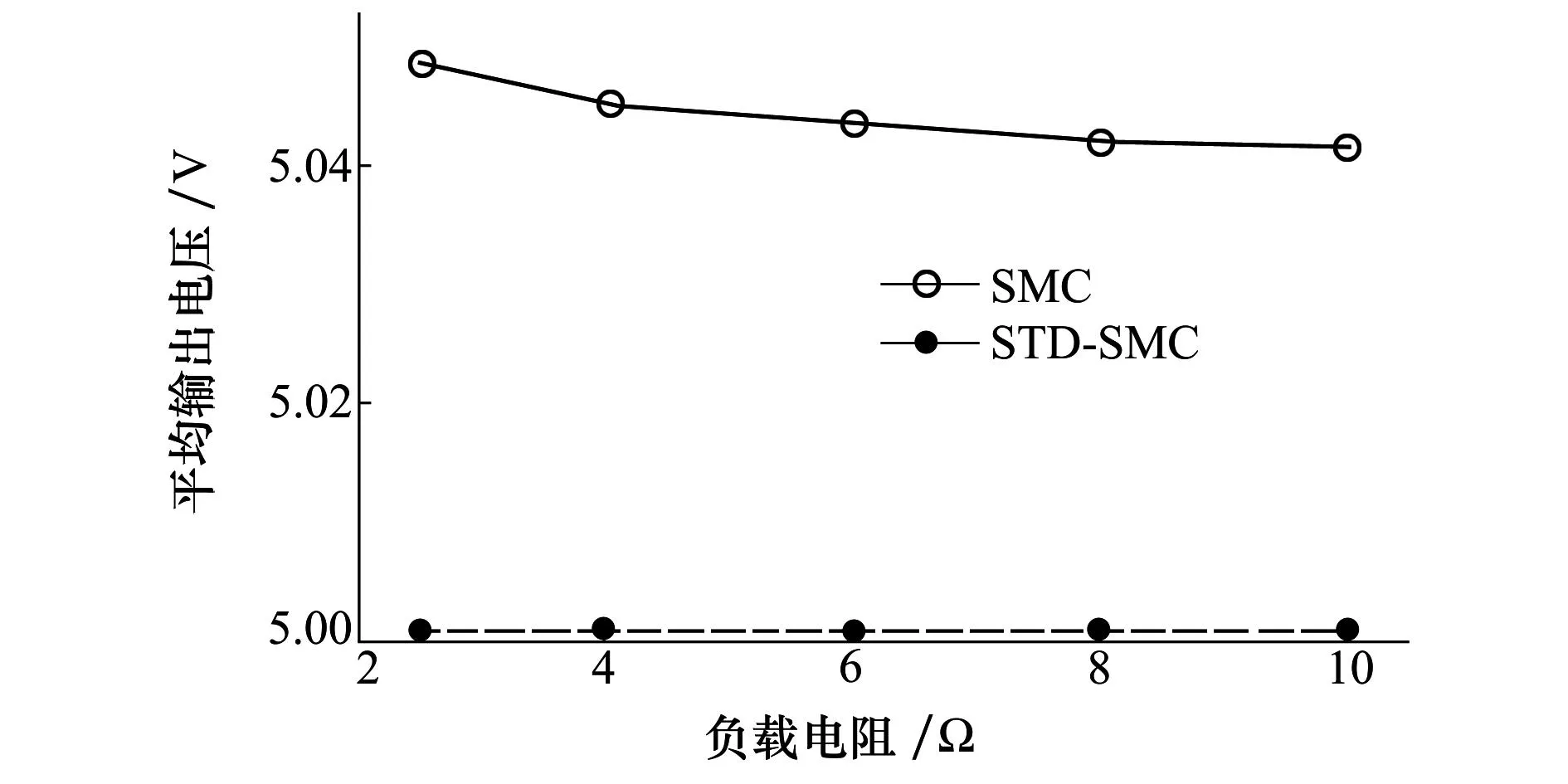
圖3 Buck變換器負載調(diào)節(jié)(輸入電壓Vin=15 V)
5.2動態(tài)性能測試
額定工況下,變換器輸入電壓為15 V,輸出側(cè)負載電阻為2.5 Ω,2種控制器的動態(tài)響應(yīng)波形如圖4所示。圖4的分析結(jié)果見表1。常規(guī)滑模控制上升時間為57.5 ms,STD滑模控制上升時間為47.1 ms,2種控制器的上升時間大致相等。SMC穩(wěn)態(tài)誤差為48.2 mV,STD-SMC穩(wěn)態(tài)誤差較小,為0.7 mV。圖5是滑模變量一階導(dǎo)數(shù)STD估計值與測量值對比,從圖中可以看出,自系統(tǒng)啟動開始,STD估計值能夠較準確地收斂到真實值。
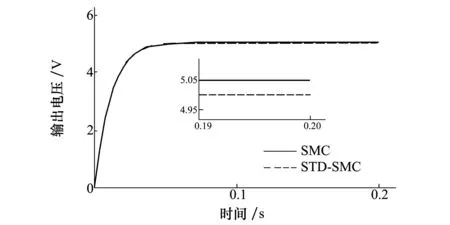
圖4 Buck變換器動態(tài)響應(yīng)波形
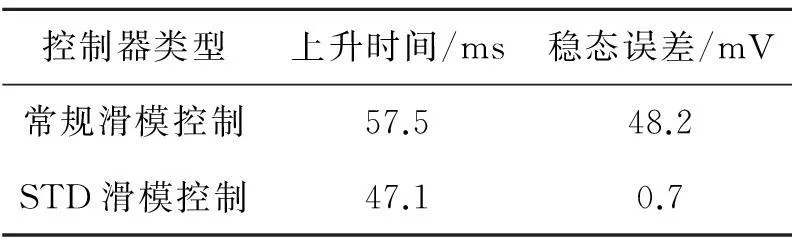
控制器類型上升時間/ms穩(wěn)態(tài)誤差/mV常規(guī)滑模控制57.548.2STD滑模控制47.10.7
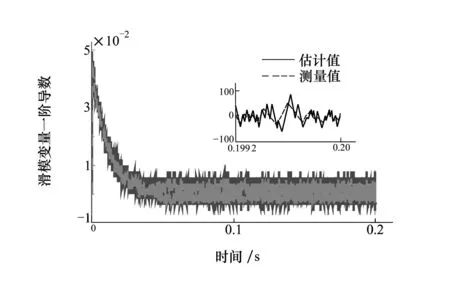
圖5 滑模變量一階導(dǎo)數(shù)STD估計值與測量值
5.3輸入電壓擾動測試
為測試所設(shè)計控制器對輸入電壓擾動的魯棒性,在0.25 s時刻施加電壓階躍擾動,輸入電壓由15 V變?yōu)? V,負載電阻為2.5 Ω,測試結(jié)果如圖6所示。圖6b)的分析結(jié)果見表2。在輸入電壓擾動下,SMC電壓跌落為67.9 mV,需要73.2 ms恢復(fù)時間,而STD-SMC電壓跌落僅為8.2 mV,恢復(fù)過程耗時0.14 ms。
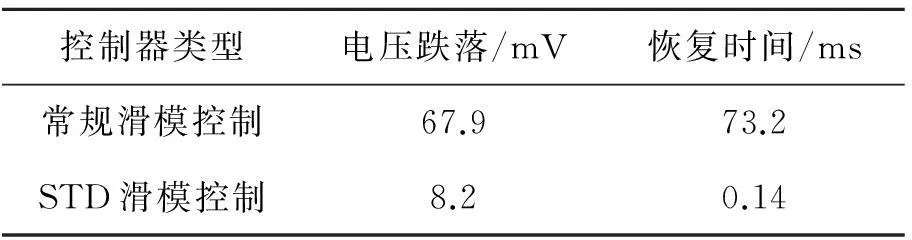
表2 輸入電壓擾動測試結(jié)果
5.4輸出負載擾動測試
為測試所設(shè)計控制器對輸出負載擾動的魯棒性,在0.25 s時刻施加負載擾動,負載電阻由5 Ω突變?yōu)?.5 Ω,輸入電壓為15 V,測試結(jié)果如圖7所示。圖7b)的分析結(jié)果見表3。在輸出負載擾動下,常規(guī)滑模控制變換器輸出電壓瞬時壓降為24 mV,需要32.6ms恢復(fù)時間,而STD滑模控制輸出電壓瞬時壓降為27.2 mV,僅需要2.2 ms時間重新達到穩(wěn)態(tài)。

表3 輸出負載擾動測試結(jié)果
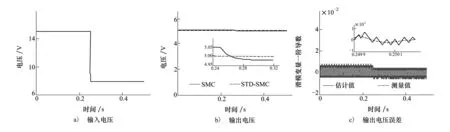
圖6 Buck變換器輸入電壓擾動測試結(jié)果
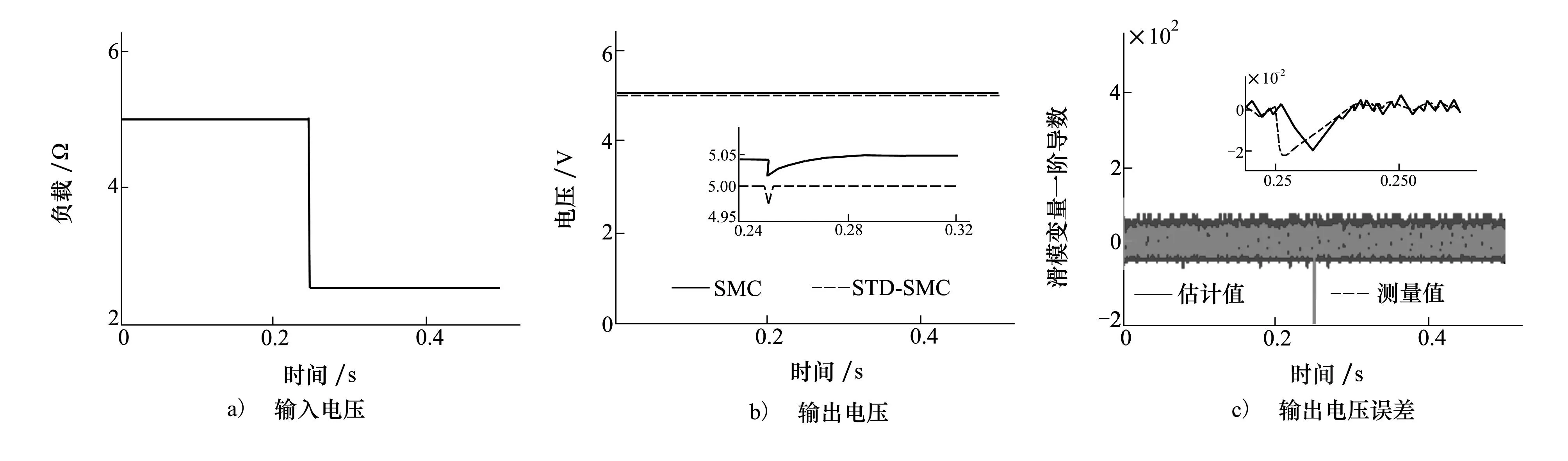
圖7 Buck變換器輸出負載擾動測試結(jié)果
6結(jié)論
針對Buck變換器常規(guī)滑模控制需要同時測量變換器輸出電壓和濾波電容電流,提出一種基于STD的滑模控制器。STD滑模控制僅需檢測變換器輸出電壓,因此可以將電流傳感器從控制環(huán)路中移除,從而簡化控制系統(tǒng)。仿真結(jié)果表明:(1)基于STD得到的滑模變量一階導(dǎo)數(shù)估計值能夠較為迅速地收斂到真實值;(2)基于STD的滑模控制具有與常規(guī)滑模控制基本一致的動態(tài)響應(yīng)特性;(3)與常規(guī)滑模控制相比,基于STD的滑模控制穩(wěn)態(tài)誤差更小;(4)基于STD的滑模控制保留了常規(guī)滑模控制對輸入電壓和輸出負載擾動的強魯棒性。
本文所提出的基于STD的Buck變換器滑模控制得到了仿真驗證,為新能源發(fā)電用電源變換器控制設(shè)計提供了新的思路。
參考文獻:
[1]Vadim I U. Survey Paper Variable Structure Systems with Sliding Modes[J]. IEEE Trans on Automatic control, 1977, 22(2): 212-222
[2]Tan S C, Lai Y M, Tse C K. General Design Issues of Sliding-Mode Controllers in DC-DC Converters[J]. IEEE Trans on Industrial Electronics, 2008, 55(3): 1160-1174
[3]Tan S C, Lai Y M, Cheung M K, et al. On the Practical Design of a Sliding Mode Voltage Controlled Buck Converter[J]. IEEE Trans on Power Electronics, 2005, 20(2): 425-437
[4]Wai R J, Shih L C. Design of Voltage Tracking Control for DC-DC Boost Converter via Total Sliding-Mode Technique[J]. IEEE Transactions on Industrial Electronics, 2011, 58(6): 2502-2511
[5]倪雨, 許建平, 王金平, 等. 滯環(huán)調(diào)制全局滑模控制Buck變換器設(shè)計[J]. 中國電機工程學(xué)報, 2010, 30(21): 1-6
Ni Yu, Xu Jianping, Wang Jinping, et al. Design of Global Sliding Mode Control Buck Converter with Hysteresis Modulation[J]. Proceedings of CSEE, 2010, 30(21): 1-6 (in Chinese)
[6]吳宇, 皇甫宜耿, 張琳, 等. 大擾動Buck-Boost變換器的魯棒高階滑模控制[J]. 中國電機工程學(xué)報, 2015, 35(7): 1740-1748
Wu Yu, Huangfu Yigeng, Zhang Lin, et al. A Robust High Order Sliding Mode for Buck-Boost Converters with Large Disturbances[J]. Proceedings of CSEE, 2015, 35(7): 1740-1748 (in Chinese)
[7]許佳妮, 皇甫宜耿, 卓生榮, 等. 大擾動下Buck電源變換PCL控制器設(shè)計[J]. 西北工業(yè)大學(xué)學(xué)報, 2016, 34(1): 73-78
Xu Jiani, Huangfu Yigeng, Zhuo Shengrong, et al. PCL Sliding Mode Controller Design for Buck Converter under Large Disturbances[J]. Journal of Northwestern Polytechnical University, 2016, 34(1): 73-78 (in Chinese)
[8]Levant A. Robust Exact Differentiation Via Sliding Mode Technique[J]. Automatica, 1998, 34(3): 379-384
[9]Erickson R W, Maksimovic D. Fundamentals of Power Electronics[M]. Springer Science & Business Media, 2007
[10] Shtessel Y, Edwards C, Fridman L, Levant A. Sliding Mode Control and Observation[M]. New York, NY, USA, Birkh?user, 2014
[11] Davila J, Fridman L, Levant A. Second-Order Sliding-Mode Observer for Mechanical Systems[J]. IEEE Trans on Automatic Control, 2005, 50(11): 1785-1789
[12] Atassi A N, Khalil H K. Separation Results for the Stabilization of Nonlinear Systems Using Different High-Gain Observer Designs[J]. Systems & Control Letters, 2000, 39(3): 183-191
A STD Based Sliding Mode Control Design for DC-DC Buck Converter
Huangfu Yigeng1, Zhuo Shengrong1, Wang Xiaofei2, Jiang Kangbo3
1.School of Automation, Northwestern Polytechnical University, Xi′an 710072, China 2.AVIC The First Aircraft Institute, Xi′an 710089, China 3.Chinese Flight Test Establishment, Xi′an 710089, China
Abstract:The conventional sliding mode control design for DC-DC buck converter needs to measure the converter output voltage and the capacitor current simultaneously. In contrast to this, the paper proposes an innovative super-twisting differentiator (STD) based sliding mode control for DC-DC buck converter. The STD based sliding mode control only needs to measure the converter output voltage. There is no need to measure the capacitor current, such that the current sensor can be removed from the control loop, thus the control system is simplified. It has been demonstrated by simulation results that when compared with conventional sliding mode control, the proposed STD sliding mode control can achieve smaller steady state voltage error and at the same time, the strong robustness against the input voltage perturbation and load resistance disturbance can also be preserved.
Keywords:DC-DC converter, super-twisting controller, MATLAB, sliding mode differentiator
收稿日期:2016-03-17
基金項目:航空科學(xué)基金(2014ZC53037)及陜西省工業(yè)科技攻關(guān)項目(S2016YFGY0251)資助
作者簡介:皇甫宜耿(1981—),西北工業(yè)大學(xué)副教授,主要從事電源變換器、滑模控制技術(shù)及新能源發(fā)電的研究。
中圖分類號:TM423
文獻標志碼:A
文章編號:1000-2758(2016)04-0663-06
