低壓微網孤島模式下改進的下垂控制策略
2016-07-28 06:44:51龍軍,羅群,覃龍
廣西大學學報(自然科學版) 2016年3期
龍 軍,羅 群,覃 龍
(1.廣西大學電氣工程學院, 廣西南寧530004;2.廣西大學先進測控與智能電力研究中心, 廣西南寧530004)
?
低壓微網孤島模式下改進的下垂控制策略
龍軍1,2,羅群1,2,覃龍1,2
(1.廣西大學電氣工程學院, 廣西南寧530004;2.廣西大學先進測控與智能電力研究中心, 廣西南寧530004)
摘要:針對多臺分布式電源并聯孤島運行時,使用傳統的下垂控制策略存在功率振蕩以及受負荷波動影響較大等問題,提出了一種基于簡化情感智能控制器的低壓微網P-V下垂控制策略,功率控制中引入自調節下垂系數環節,電壓外環控制中引入具有參數自學習能力的簡化情感控制器。結果表明,與傳統下垂控制方式相比,基于簡化情感智能控制器的低壓微網P-V下垂控制策略可以更好地實現系統功率的準確均分,抑制功率振蕩和減少負荷變化帶來的電壓波動,提高系統的動穩態性能。
關鍵詞:微網;下垂控制;孤島模式;功率均分;情感控制器
在日益嚴重的能源緊缺與環境危機的雙重壓力下,新能源技術已成為全球各國的研究熱點。傳統的主從控制需要強通信,不適用于逆變器并聯運行的獨立系統,而微電網下垂控制使用弱通信,能夠實現多分布式電源的功率分配和“即插即用”功能,其冗余性和可靠性較高[1],因而成為微網研究的重點。
下垂控制方法是在線路阻抗呈感性的前提下,借鑒發電機的下垂特性控制逆變器的輸出功率和電壓[2-3]。傳統的下垂控制策略會因負荷的大幅度變化導致電壓和頻率的偏移。文獻[4]采用PR控制器實現了靜止α/β坐標系下的無靜差跟蹤,且抑制了電網電壓特定次諧波影響,但PR控制器的階數高,增加系統設計的復雜度。文獻[5]提出一種基于自抗擾技術的微電網下垂控制策略,具有較強的抗干擾能力,但電壓幅值波動較大。文獻[6]提出一種改進的下垂控制策略,在電壓外環控制環節引入輔助控制信號,提高了系統的動態性能。文獻[7]分析單電壓環控制和雙閉環控制的優缺點,針對運行場合的不同來選擇控制策略。文獻[8]對比兩種重復控制與PI控制相結合的復合控制方法的優缺點,提出引入重復控制的復合控制策略。文獻[9]提出了一種動態調節下垂系數的改進下垂控制策略,實現了運行模式的平滑過渡和恒功率輸出。
20世紀末,情感被證實在人類的認知過程中有著重要的促進作用。Lucas在2004年設計出了基于BEL的智能控制器,稱為基于大腦情感學習的智能控制器(BEL-Based Intelligent Controller,BELBIC)[10]。隨著微處理器運行速度的不斷提高,BELBIC的實時性問題得到有效解決[11],并在各種工業領域得到了廣泛應用[12-13],但情感控制器不足之處在于參數過多且難于整定,而簡化情感控制器在保留參數自學習能力的基礎上簡化了BEL模型,克服了多參數和難整定的缺點。
本文針對傳統下垂控制策略功率振蕩以及受負荷波動影響較大等問題,進行了微電網下垂系統建模,將簡化情感控制器應用于其中,使系統具有參數自學習能力。仿真結果表明所設計的改進下垂控制策略能抑制功率振蕩和減少負荷變化帶來的電壓波動,提高了系統的動穩態性能。
1簡化情感控制器
1.1情感控制器

圖1 情感控制器的模型Fig.1 Structure of BELBIC
情感控制器的結構如圖1所示,它包括杏仁體、眶額皮質、丘腦以及感官皮質[14]。杏仁體發揮主要控制作用,它與眶額皮質、丘腦以及感官皮質在處理情緒的過程中保持協調一致。眶額皮質協助杏仁體的學習過程,避免出現過學習和欠學習。
在情感控制器模型中,丘腦接收感官輸入信號的最大值,并將其傳輸至杏仁體。杏仁體和眶額皮質的輸出分別為:
Ath=VthSImax,
(1)
Aj=SIjVj,
(2)
Oj=SIjWj,
(3)其中,SImax為所有感官輸入信號中的最大值,Ath為杏仁體接受的丘腦刺激信號,SIj是第j個感官輸入信號,Aj和Oj分別為第j個刺激信號的杏仁體和眶額皮質的輸出值,Vth、Vj和Wj為相應節點的權值。
情感控制器模型輸出為:

(4)
情感學習過程是通過動態調節權值來實現,將情感控制器應用到下垂系統的雙環控制的電壓環中,杏仁體權值調節率為:
(5)
其中,i=1,2,3,αd和αq為杏仁體學習率。
眶額皮質權值調節率為:
(6)
其中,j=1,2,3,βd和βq為眶額皮質學習率。
下垂系統的情感控制器的輸出為:
(7)
式中,sd1,sd2,sq1和sq2為可調參數;υd1,υd2,υdm,υq1,υq2,υqm為杏仁體權值;ωd1,ωd2,ωq1,ωq1為眶額皮質權值;ed,eq為d軸和q軸的電壓誤差。

圖2 簡化情感控制器的結構Fig.2 Structure of simplified emotional intelligent controller
1.2簡化情感控制器
情感控制器的比例、積分參數會同時影響杏仁體和眶額皮質的權值。簡化情感控制器是在情感控制器模型的基礎上去除眶額皮質,并隱藏獎勵信號,達到了簡化結構和減少參數的目的。簡化情感控制器的結構如圖2所示[15]。
本文通過去除獎勵信號REWd和REWq的方式,達到了減少情感控制器參數的目的。因系統中各層的輸出都具有PI結構,故情感控制器中存在使下面等式成立的相應參數:
(8)
將上式代入式(5)中,杏仁體權值調節率為:
(9)
其中,i=1,2。
(10)
由上式可看出,簡化情感控制器具有PI結構,因保留了杏仁體,參數具有自校正能力。sd1vd1、sq1vq1相當于PI控制器的比例參數,sd2vd2、sq2vq2相當于積分參數。
在一定范圍內,sd1、sq1越小,其靜差相對較小,調整時間較長,sd1、sq1越大,其靜差相對較大,系統振蕩加劇,相對調整時間縮短;sd2、sq2越小,其靜差越大,調整時間較短,而sd2、sq2越大,則靜差越小,但是調整時間變大。比例和積分參數的調整方向和步長取決于雙環控制中電壓誤差的大小,學習率為參數調整的步長,α過小,系統達到穩定的時間變慢;α過大,比例、積分系數變化過快,易造成系統振蕩。當下垂控制系統到達穩態或者過跟蹤后,調節器參數將不再變化,而是依靠PI控制器進行系統調節。
2改進的微網下垂控制策略
在低壓微電網中,線路阻抗呈阻性,系統常采用P-V下垂控制。另外,不一致的傳輸線路阻抗和本地負荷會影響功率均分的精確性。通常情況下,采用虛擬阻抗方法[16]或調節下垂系數方法[17]解決該問題。
根據傳輸線呈阻性推導出來的P-V下垂控制方程為:
fref=f0-kQ(Qav-Q0),
(11)
uref=U0-[kP-(DP+Di/s)(P*-Pav)]P0,
(12)
其中,

(13)

(14)

(15)

本文改進的下垂控制結構示意圖如圖3所示。圖中,Udc為直流測電壓;Li、Ci分別為三相濾波器的電感和電容;u0i、ici分別為濾波電容電壓和電流;i0i為DG輸出電流;ZLi為線路阻抗;ZLDi為本地負載,其中,i=a,b,c。
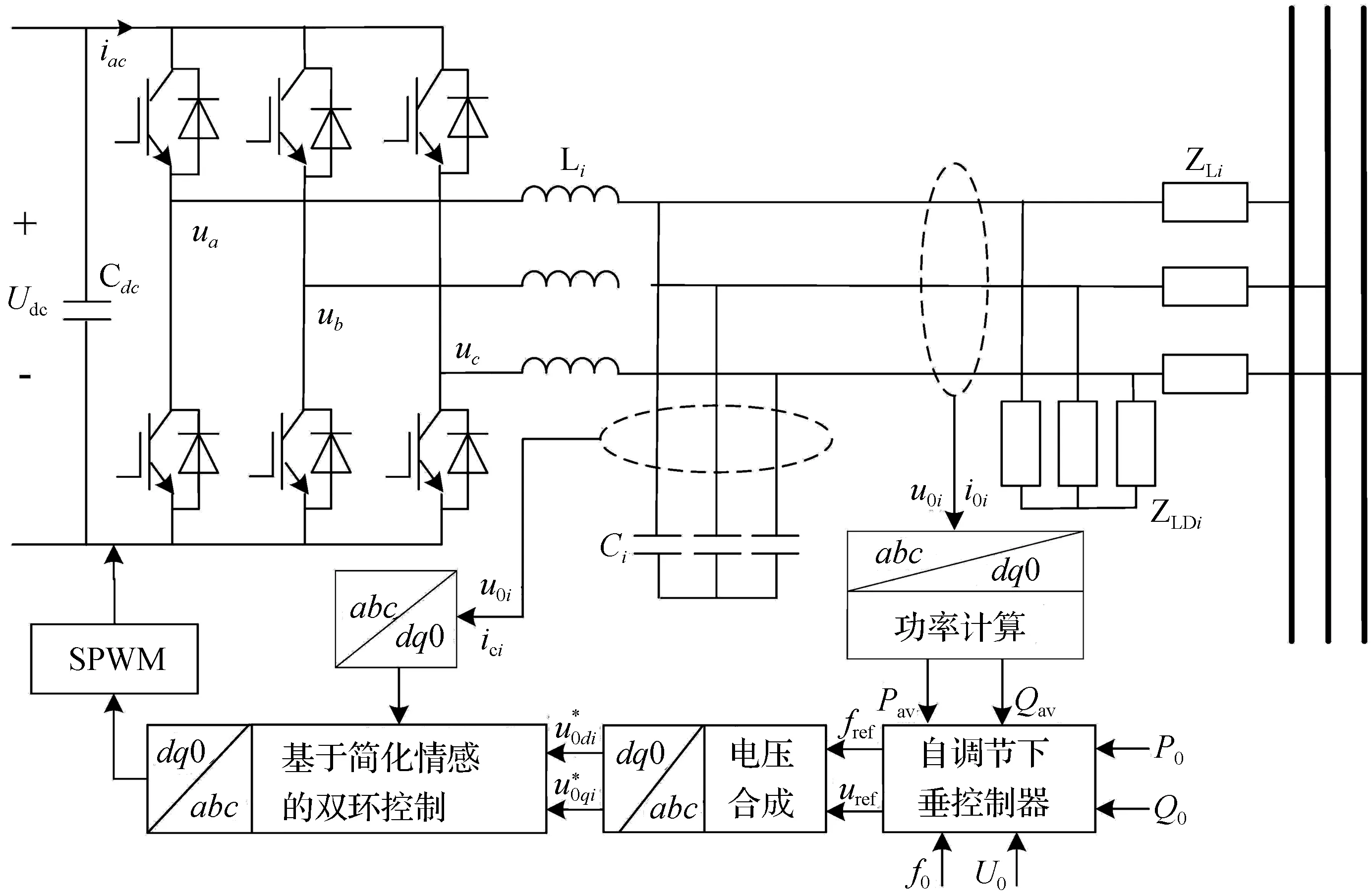
圖3 改進的下垂控制結構
功率控制環節引入自調節下垂系數,其結構框圖如圖4所示。功率控制環節的下垂系數經過PI控制器的調節,使之隨著系統功率的變化而小幅波動,從而達到合理分配有功功率的目的。

圖4 自調節下垂系數功率控制環節

圖5 基于簡化情感的電壓電流雙環控制環節Fig.5 Voltage and current double-loop control section based on simplified emotion

電壓電流雙環控制的外環采用簡化情感控制器,參數能夠根據被控對象的變化而變化,增強下垂控制系統的抗干擾能力;內環為電流控制環,采用比例控制器,以增加系統帶寬,提高響應速度。
3算例與仿真實驗
基于Matlab/Simulink仿真平臺,對所提出的微電網下垂控制策略進行動態仿真驗證,其基本示意圖如圖6所示。微網由3個分布式電源并聯組成,且均采用下垂控制,交流側母線電壓為380 V,負荷1、2、3為本地負荷,負荷4為可變負荷。
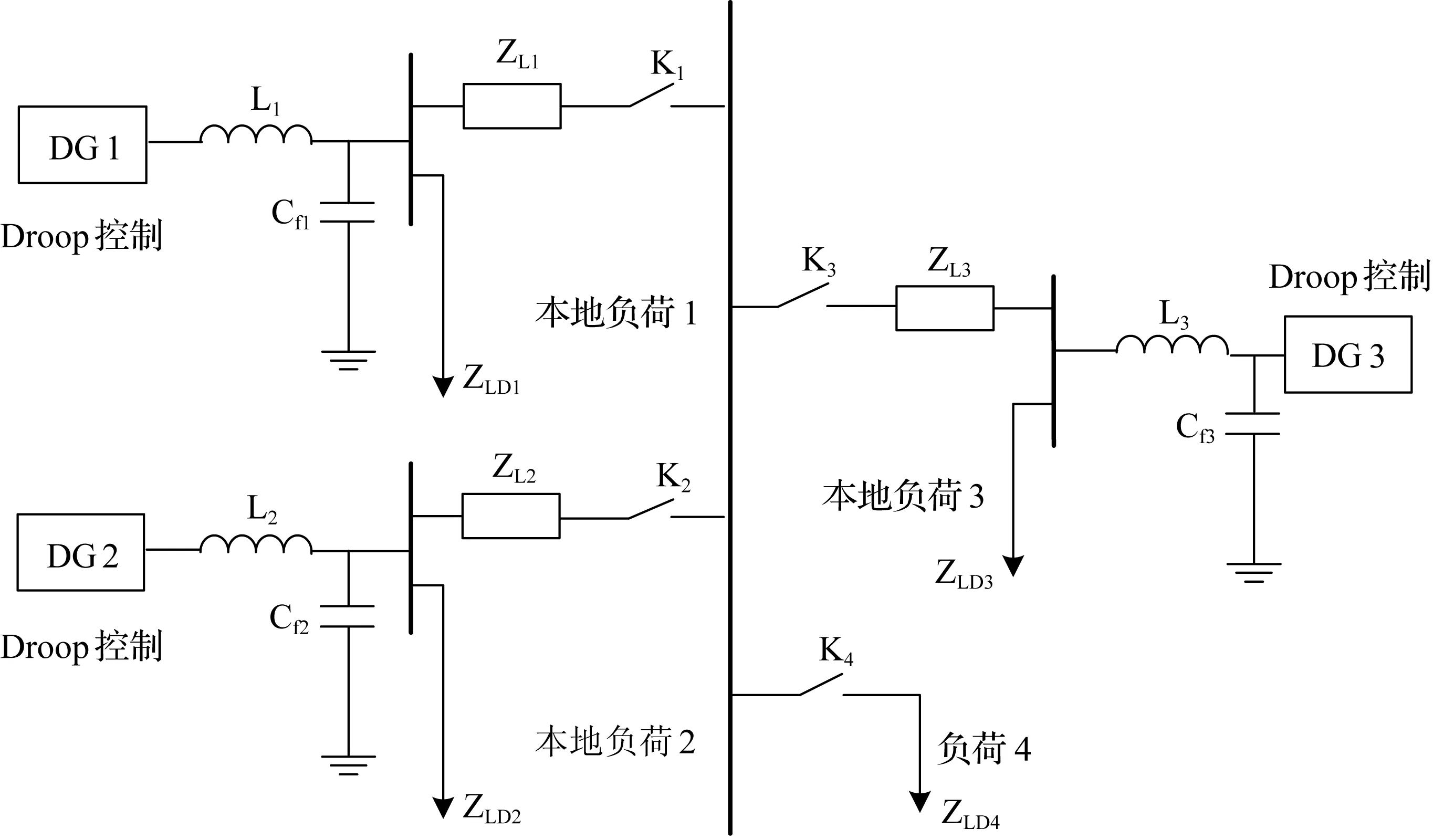
圖6 微網結構圖
分布式電源的逆變器容量比為2∶1∶1;微網的線路參數為R=0.641 Ω/km,X=0.101 Ω/km,可變負荷4的功率為16 kW,12 kvar;PI控制器參數:ki=5,kp=100;簡化情感智能控制器參數:sd1=sq1=0.5,sd2=sq2=6,αd=αq=0.1;分布式電源的仿真參數如表1所示。
微網處于孤島模式下,其仿真過程為:0~0.2 s,K1、K2、K3、K4均斷開,分布式電源DG各自帶本地負載運行;0.2~0.35 s,K1、K2、K3閉合,3個DG并聯運行;0.35 s,K4閉合,投入可變負荷4;K4斷開,0.65 s切除負荷4;0.9 s,K1斷開,切除DG1,DG2、DG3并聯運行。

表1 分布式電源的仿真參數
采用傳統PI控制器和簡化情感控制器的下垂控制仿真波形如圖7~圖10所示。

(a) PI控制器DG單元輸出的有功功率

(b) 簡化情感控制器DG單元輸出的有功功率

(c) PI控制器DG單元輸出的無功功率

(d) 簡化情感控制器DG單元輸出的無功功率

(e) PI控制器DG單元輸出的頻率

(f) 簡化情感控制器DG單元輸出的頻率
圖7采用PI控制器與簡化情感控制器的DG單元仿真結果
Fig.7Simulation results of DG using PI controller and simplified emotional intelligent controller

(a) 基于PI控制器的下垂系統中DG1單元的輸出電壓

(b) 基于簡化情感控制器的下垂系統中DG1單元的輸出電壓

(a) 基于PI控制器的下垂系統中DG1單元的輸出電流

(b) 基于簡化情感控制器的下垂系統中DG1單元的輸出電流

(a) 基于PI控制器的下垂系統中DG2單元的輸出電壓

(b) 基于簡化情感控制器的下垂系統中DG2單元的輸出電壓

(c) 基于PI控制器的下垂系統中DG2單元的輸出電流

(d) 基于簡化情感控制器的下垂系統中DG2單元的輸出電流

(a) 基于PI控制器的下垂系統中DG3單元的輸出電壓

(b) 基于簡化情感控制器的下垂系統中DG3單元的輸出電壓

(c) 基于PI控制器的下垂系統中DG3單元的輸出電流

(d) 基于簡化情感控制器的下垂系統中DG3單元的輸出電流
由圖7~圖11可得,基于PI控制的下垂控制系統存在功率振蕩以及受負荷波動影響較大等問題。經過波形對比可知,采用簡化情感智能控制器的微網下垂控制系統有3個優點:
①由圖7~圖11可看出,在0~1 s時,在微網下垂控制系統中,采用簡化情感智能控制器的超調量比采用傳統PI控制器小。以圖8(a)為例,電壓超調量由10.5%減小至無超調。
②比較圖7~圖11在開關動作前后的功率穩態波形,可見采用簡化情感控制器的波形振蕩程度更小,具有良好的穩態性能。
③仿真中參考電壓幅值為311 V。在0.65 s切除可變負荷4時,圖8(a)、圖10(a)、圖11(a)中的電壓幅值增加至365 V左右,圖7(c)中無功功率突增了2 000 var、1 200 var、1 200 var,需要0.01 s的調節時間。而采用簡化情感控制器的圖8(b)、圖10(b)、圖11(b)中的電壓幅值僅增加至345 V左右,圖7(d)中無功功率突增1 000 var、600 var、600 var,僅需要0.004 s便達到穩態,表明采用簡化情感控制器的微網下垂系統的抗干擾能力明顯增強,調節時間更短。
4結論
本文針對傳統下垂控制中功率振蕩以及輸出電壓與頻率易受負荷波動影響等問題,提出了一種孤島模式下改進的下垂控制策略。簡化情感控制器是BEL模型的改進,參數較少且具有參數自學習能力。將簡化情感智能控制器應用于微電網下垂控制策略中,其參數易于整定,方法簡單易行。仿真實驗結果表明,該策略能保證系統功率分配的精確性,且在負荷波動和投切DG時表現出來的抗干擾能力、動態性能和穩態精度均優于傳統PI控制器。
參考文獻:
[1]王成山,武震,李鵬.微電網關鍵技術研究[J]. 電工技術學報,2014,29(2):1-12.
[2]郜登科,姜建國,張宇華.使用電壓-相角下垂控制的微電網控制策略設計[J]. 電力系統自動化,2012,36(5):29-34.
[3]張純,陳民鈾,王振存.微網運行模式平滑切換的控制策略研究[J]. 電力系統保護與控制,2011,39(20):25-34.
[4]呂永燦,林樺,楊化承,等.基于多諧振控制器和電容電流反饋有源阻尼的PWM變換器電流環參數解耦設計[J]. 中國電機工程學報,2013,33(27):44-51.
[5]朱昊,韋鋼,吳萬祿,等.自抗擾技術在微電網下垂控制策略中的應用[J]. 電力系統保護與控制,2014,42(9):61-67.
[6]張潔,劉天琪,劉建華,等.提高微電網孤島運行下垂控制動態性能的策略[J]. 電力系統及其自動化學報,2015,27(5):75-80,91.
[7]黃偉煌,付勛波,林資旭,等.LC濾波電壓源型逆變器閉環控制策略綜合對比與設計[J]. 電力系統自動化,2013,37(19):110-115.
[8]王斯然,呂征宇.LCL型并網逆變器中重復控制方法研究[J]. 中國電機工程學報,2010,30(27):69-75.
[9]徐瑞林,徐鑫,鄭永偉,等.基于改進下垂控制的微網運行控制策略[J]. 電力系統及其自動化學報,2012,24(6):14-19.
[10]LUCAS C,SHAHMIRZADI D,SHEIKHOLESLAMI N.Introducing BELBIC:brain emotional learning based intelligent controller[J]. International Journal of Intelligent Automation and Soft Computing,2004,10(1):11-12.
[11]JAMALI M R,DEHYADEGARI M,ARAMI A,et al.Real-time embedded emotional controller[J]. Neural Computing and Applications,2010,19(1):13-19.
[12]ROUHANI H,JALILI M,ARAABI B N,et al.Brain emotional learning based intelligent controller applied to neurofuzzy model of micro-heat exchanger[J]. Expert Systems with Applications,2007,32(3):911-918.
[13]LUCASC,MILASI R M,ARAABI B N.Intelligent modeling and control of washing machine using locally linear neuro-fuzzy (LLNF) modeling and modified brain emotional learning based intelligent controller (BELBIC)[J]. Asian Journal of Control,2006,8(4):393-400.
[14]宮萍萍,盧子廣,盧泉.光伏并網系統的大腦情感控制器設計方法[J]. 廣西大學學報(自然科學版),2013,38(5):1187-1195.
[15]盧子廣,盛洋波,楊達亮,等.基于簡化情感的D-STATCOM控制器設計[J]. 電機與控制學報,2014,18(3):101-106.
[16]王瑞琪,程艷,孫樹敏,等.基于坐標旋轉虛擬阻抗的微電網控制與性能分析[J]. 電力系統保護與控制,2014,42(12):78-86.
[17]孫孝峰,楊雅麟,趙巍,等.微電網逆變器自適應下垂控制策略[J]. 電網技術,2014,38(9):2386-2391.
(責任編輯裴潤梅)
收稿日期:2016-01-06;
修訂日期:2016-02-02
基金項目:國家自然科學基金資助項目(51567002)
通訊作者:龍軍(1956—),男,廣西南寧人,廣西大學教授;E-mail:gxnnlj161@163.com。
doi:10.13624/j.cnki.issn.1001-7445.2016.0754
中圖分類號:TM71
文獻標識碼:A
文章編號:1001-7445(2016)03-0754-10
Improved droop control strategy for island low-voltage microgrid
LONG Jun1,2, LUO Qun1,2, QIN Long1,2
(1.College of Electrical Engineering,Guangxi University, Nanning 530004, China;2.Advanced Control and Intelligent Power Research Center, Guangxi University, Nanning 530004, China)
Abstract:When parallel-connected DGs run in islanding mode the problems of power oscillation and voltage fluctuation arise by using the traditional droop control strategy. A P-V droop control strategy based on the simplified emotional intelligent controller which used in the low-voltage microgrid is proposed. The simplified emotional intelligent controller which had the ability of parameter self-learning is applied in outer voltage loop while droop coefficient self-regulating section is introduced into the part of power control. In the simulation, comparing with the traditional droop control strategy, the proposed control strategy can make load distribution more accurate and can restrain power oscillation and voltage fluctuation which give a better dynamic and static performance of system.
Key words:microgrid; droop control; islanding mode; power sharing; emotion controller
引文格式:龍軍,羅群,覃龍.低壓微網孤島模式下改進的下垂控制策略[J].廣西大學學報(自然科學版),2016,41(3):754-763.