列車主動懸掛預測控制算法研究
2016-08-04 08:12:00曹青松王明翔
噪聲與振動控制 2016年1期
曹青松,王明翔,陶 晶
(華東交通大學 機電工程學院,南昌 330013)
?
列車主動懸掛預測控制算法研究
曹青松,王明翔,陶晶
(華東交通大學 機電工程學院,南昌 330013)
摘要:為有效抑制列車車體的振動,針對列車在運行時受到的不確定軌道干擾激勵等影響因素,開展一種基于標準正交基函數Laguerre的主動懸掛預測控制算法研究。首先建立列車主動懸掛系統的狀態空間模型,再以此作為預測控制模型,結合預測控制中的滾動優化等基本原理,為高速列車連續時域主動懸掛系統設計相應的預測控制器。仿真結果表明:設計的預測控制器能夠優化高速列車在運行時的振動主動控制性能,改善列車的乘坐舒適性。
關鍵詞:振動與波;軌道干擾激勵;主動懸掛;正交基函數;狀態空間模型;預測控制器
隨著列車速度不斷提升,導致振動量也隨之增加[1,2]。這不僅影響了乘客乘坐舒適性,也會對列車上使用的一些精密儀器設備性能產生較大的影響。懸掛系統的減振性能是保證列車的舒適性、安全性和運行平穩性的重要指標,因此,人們對其提出了更高的要求。被動、半主動和(全)主動等三種懸掛方式,是當前鐵道車輛采用的主要懸掛形式。被動懸掛系統只是按照人們一些相關經驗和簡單的優化方法進行參數設定,對外界環境變化適應性能較差,不能夠對實際情況進行參數實時調節,已經難以適用于現代各項性能指標要求更高的高速列車[3,4]。半主動懸掛系統具備結構簡易、造價較低、不需要大功率能源裝置的優點,是Kamopp等提出的,根據既定的阻尼控制規律,可以實現阻尼力的實時調節[5]。懸掛系統對于改善車輛行駛平順性和提高操縱穩定性起著重要作用。相對于被動懸掛,主動懸掛可以明顯改善車輛的乘坐舒適性[6,7],并且能較好地解決高速列車較為突出的橫向振動控制問題[8],已經越來越受到學者們的關注。
近些年來,基于狀態空間模型的預測控制[9]算法的研究已日趨成熟。本文開展高速列車主動懸掛預測控制算法的研究,利用軌道垂向不平順隨機激擾模型,將其作為列車軌道干擾激勵,采用標準正交基函數(Laguerre函數)的方法進行預測控制算法研究[10],為連續時域系統設計預測控制器。
1 列車主動懸掛模型
研究對象為單節車輛動力學模型,因此僅考慮車輛的橫向側滾振動與垂向點頭、浮沉等振動。此外,對車輛動力學模型來說,研究車輛對各種軌道不平順的系統響應特性僅需建立車輛的橫向和垂向動力學模型[11]。為精確反映實際情況,避開傳統的簡單建模方式,以單節四軸車輛為研究對象,建立包含車體以及前后轉向架的側滾、沉浮和點頭等九自由度的橫向-垂向耦合列車主動懸掛系統動力學模型,見圖1。
其中M為車體質量;m為前、后轉向架質量;IΦ為車體點頭轉動慣量;Iθ為車體側滾轉動慣量;IΦ1、IΦ2為前后轉向架點頭轉動慣量;Iθ1、Iθ2為前后轉向架側滾轉動慣量;kl、k2為一、二系懸掛彈簧垂向剛度;c1、c2為垂向減振器阻尼;l、l1為懸掛到構架質心的縱向距離;zb為車體沉浮位移;z1為前轉向架沉浮位移;z2為后轉向架沉浮位移;Φ為車體點頭角位移;θ為車體側滾角位移;θ1、θ2為轉向架側滾角位移;a、b為一、二系懸掛彈簧的橫向距離之半;v為列車運行速度;zv1、z′v1、zv2、z′v2、zv3、z′v3、zv4、z′v4為輪對處軌道面輸入位移;u1、u′1、u2、u′2、u3、u′3u4、u′4為前轉向架一系作動器控制力;u5、u′5、u6、u′6為后轉向架一系作動器控制力。取狀態變量為
X=[Zbφ θ Z2φ2θ1Z1φ1θ2Zbφ?θ?Z?2φ?2θ?1Z?1φ?1θ?2]T
控制變量為
uc=[u1u′1u2u′2u3u′3u4u′4u5u′5u6u′6]T輸出變量為
y=[Z?bφ?θ?]T
設軌道干擾輸入變量為w(t),干擾輸入矩陣為Ec,可得系統的狀態空間方程如式(1)所示
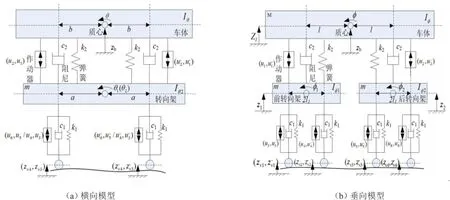
圖1 車輛主動懸掛系統動力學模型

2 主動懸掛系統預測控制器設計
根據上文建立的高速列車連續時域主動懸掛系統動力學模型,將其作為預測模型。由于預測模型屬于多輸入-多輸出系統,故而針對此系統設計預測控制器。假設系統中有p個輸入,q個輸出,狀態空間維數為n。為保證系統穩定性,設系統的輸出個數小于或等于系統的輸入個數即q≤p。
為了設計模型的預測控制器,需要將模型進行轉換。令 z(t)=x?(t),取一個新的狀態變向量,通過這個輔助變量,結合式(1),主動懸掛連續時域系統模型即可擴展成為
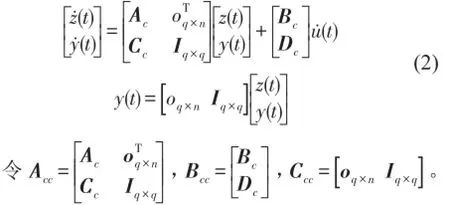
于是上式可化為

經過擴展,式(3)狀態空間方程描述的是控制信號的1階導數,而系統的輸入輸出仍保持不變。其中:oq×n為q×n維零矩陣,Iq×q為q×q維單位矩陣,由于狀態空間的擴展,在式(3)中Acc,Bcc和Ccc分別擴展成為(n+q)×(n+q),(n+q)×p和q×(n+q)維矩陣。
考慮到連續時域系統模型的控制軌跡是在一個時間從ti變化到ti+Tp的移動時間窗口,在這個窗口中的時間變量用ε表示,和t以示區別。那么這個窗口中的控制變量則是u?(ε)。設0≤ε≤Tp,狀態反饋控制增益矩陣為Kcmpc。那么

為了解決該多輸入—多輸出系統的預測控制問題,獲得連續時域主動懸掛系統模型的未來最優的控制軌跡,需要在控制器設計中引入一種標準正交基函數-Laguerre函數,下面就Laguerre函數進行簡單介紹。函數可以定義如下
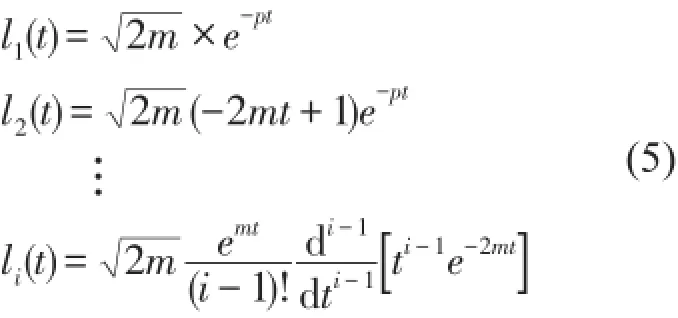
其中參數m是時間比例因子,在Laguerre函數的應用中是可以決定指數衰減率的一個重要設計參數,需根據設計需要靈活選擇,系統中每個輸入都有一個對應的m,且m>0。
式(5)所示的Laguerre函數在進行拉普拉斯變換之后,可以得到Laguerre網絡 Li(s)(i=1,2,…,)如下

基于上述,Laguerre函數可以通過狀態空間模型描述出來,定義一個狀態變量,設狀態變量的初始條件為,此時 i=1,2,…,N 。N為 Laguerre函數的設定參數,系統中每個輸入都有一個對應的N。那么Laguerre函數可以滿足如下狀態空間方程
式(7)微分方程的解為

其中
基于此,連續時域主動懸掛系統的預測狀態變量可以描述為

對于此多輸入—多輸出系統,控制信號和輸入信號矩陣分別為

控制信號也可以寫成如下標準正交形式

那么,可以預測系統未來在ε時的狀態

根據狀態變量的預測信息,便可以預測出系統在ε時的輸出
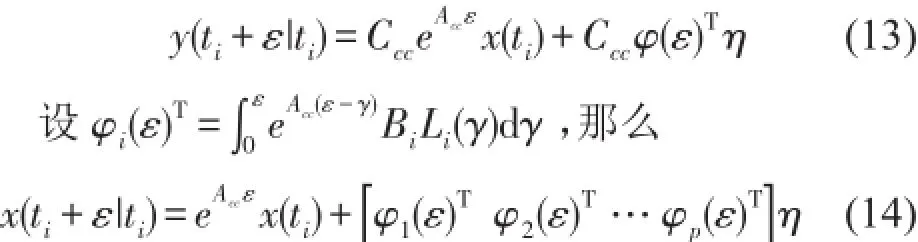
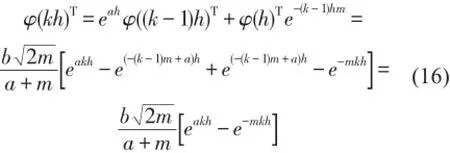
對于p個輸入的連續時域主動懸掛系統,φi(ε)T中包含p個φ(ε)T,而對于φ(ε)T,滿足下列方程

如果系統狀態的預測可以按照ε=0,h,2h,…,Tp計算,Tp為系統的預測時域,那么設h>0,Acc=a,Bcc=b,可得
對于連續時域主動懸掛系統模型,其目標函數如下
當目標函數滿足下式(18)時,J得到最小值,即得到最優化解

根據滾動優化控制原理可知
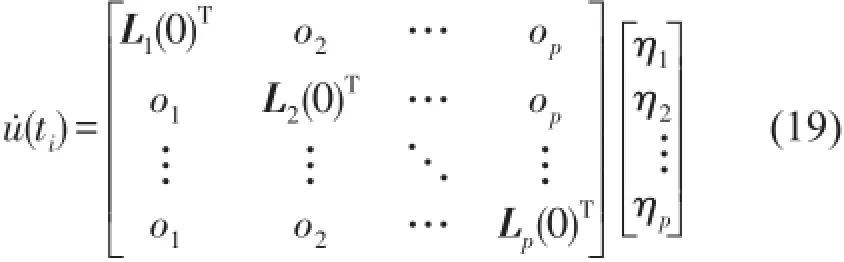
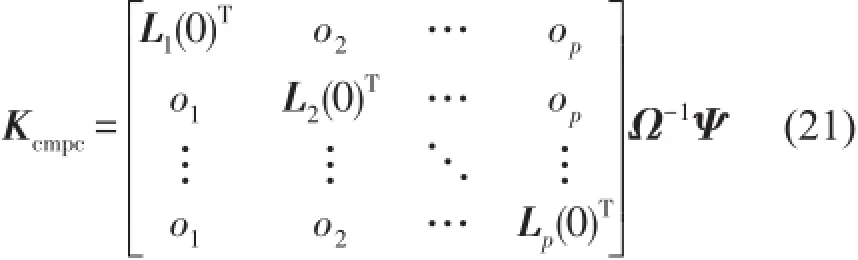
式中ok(k=1,2,…,p)是和Lk(ε)T維數相同、大小為零的行向量。設未來的參考軌跡在預測時域之內,那么系統的狀態反饋控制變量為

由此可得,列車連續時域主動懸掛系統模型預測控制的狀態反饋控制增益矩陣Kcmpc為
3 實例仿真分析
列車懸掛系統模型的主要參數如表1所示。
根據研究對象,選取對列車橫向振動和垂向振動影響較大的方向不平順和高低不平順作為系統的擾動輸入,模擬列車運行的實際情況。選用由美國軌道AAR 6級譜修正后獲得的高速譜[12],根據軌道不平順功率譜密度函數,離散采樣得出頻譜,然后采用Fourier逆變換的方法求解激擾函數,模擬出軌道不平順時域波形圖。如圖2為模擬高速列車運行時速為300 km/h時的軌道方向不平順和高低不平順的仿真結果。
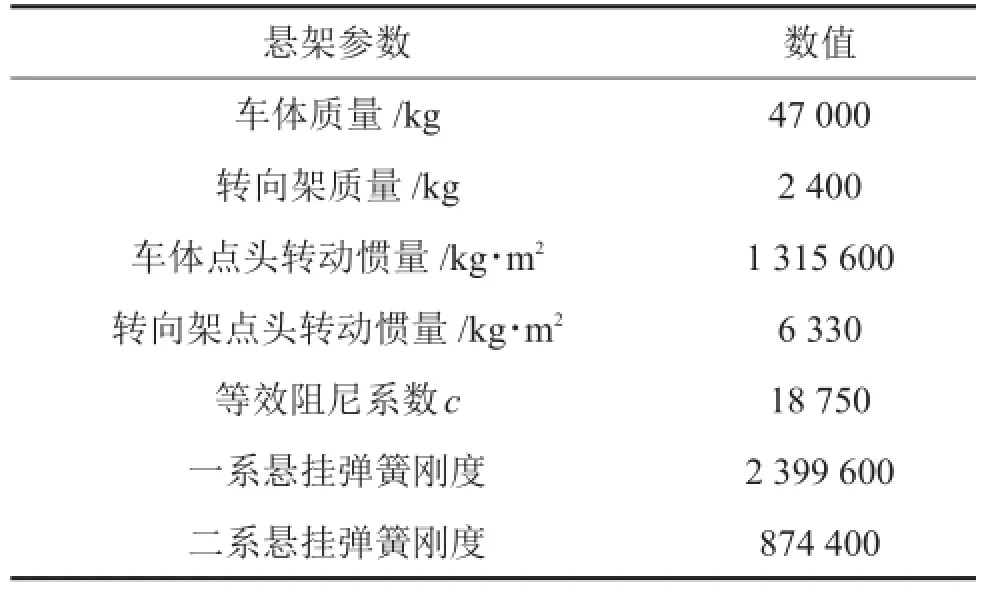
表1 懸架系統主要參數
通過分析圖3至圖5可知,對于連續時域主動懸掛系統,列車垂向振動輸出信號(車體質心垂向加速度和點頭角加速度)的振幅及峰-峰值等性能指標要略大于側滾角加速度等橫向振動輸出信號。采用預測控制后車體質心垂向加速度、點頭角加速度和側滾角加速度等輸出信號的振動幅度均得到有效抑制,由此可以驗證主動懸掛系統預測控制算法的有效性,控制后各系統輸出性能都有不同程度的提高。
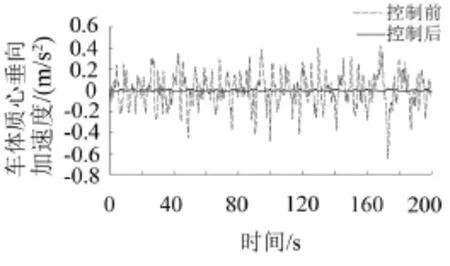
圖3 主動懸掛預測控制系統車體質心垂向加速度
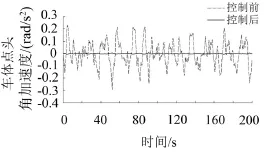
圖4 主動懸掛預測控制系統車體點頭角加速度
4結 語
通過建立高速列車主動懸掛系統模型,開展一種基于標準正交基函數Laguerre函數的預測控制算法研究。將懸掛系統的狀態空間模型作為預測控制模型,結合預測控制中的滾動優化等基本原理,考慮到列車在運行時受到的不確定軌道干擾激勵等影響因素,為高速列車連續時域主動懸掛系統設計相應的預測控制器。通過實例驗證控制器能使系統達到良好的控制效果,優化了列車在運行時的振動主動控制性能,提高了操作穩定度,確保了列車運行安全和搭乘舒適。
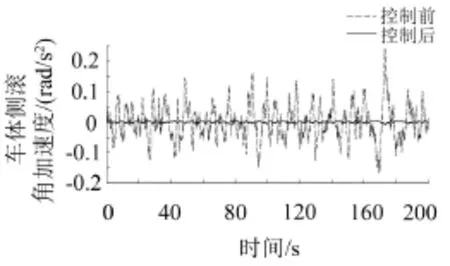
圖5 主動懸掛預測控制系統車體側滾角加速度
由于將預測控制算法和高速列車主動懸掛系統結合起來,考慮的結果是預測控制算法能否有效的抑制列車振動,使得本文控制前后差異太大,沒有對控制力進行評估和限值分析。因此,今后將開展評估控制力及其限值理論進行試驗研究。
參考文獻:
[1]陳春俊,王開云.高速列車橫向半主動懸掛系統建模研究及分析[J].振動與沖擊,2006,25(4):151-154.
[2]丁問司,卜繼玲.鐵道車輛橫向開關半主動懸架系統研究[J].機械工程學報,2004,40(9):161-164.
[3]Stribersky A,Kienberger A&Muiller H.Design and evaluation of a semi-active damping system for rail vehicles[J].Vehicle System Dynamics,1998,29(1):669-681.
[4]Bruni S,Goodall R&Mei T X.Control and monitoring forrailwayvehicledynamics[J].VehicleSystem Dynamics,2007,45(7):743-779.
[5]Karnopp D,Coby M J&Harwood R A.Vibration control usingsemi-activeforcegenerators[J].Journalof Engineering for Industry,1974,96(2):619-626.
[6]李翔晟.電磁阻尼懸架的主動控制與仿真[J].農業機械學報,2004,35(2):13-16+20.
[7]Kim Y B,Hwang W G&Kee C D.Active vibration control of a suspension system using an electromagnetic damper[J].Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engneering, 2001,215,(8):865-872.
[8]宋雨,陳衛東,張錦.高速列車半主動懸掛系統遺傳優化模糊控制[J].噪聲與振動控制,2012,32(6):158-164
[9]朱浩,劉少軍,黃中華,等.鐵道車輛垂向主動懸掛的預見控制[J].中國鐵道科學,2005(2):90-95.
[10]Muhammad Abdullah,Moumen Idres.Fuel cell starvation control using model predictive technique with Laguerre andexponentialweightfunctions[J].Journalof Mechanical Science and Technology,2014,28(5):1995-2002.
[11]鄧浩.列車橫向半主動懸掛系統廣義預測控制的研究[D].成都:西南交通大學,2013.
[12]王福天,周勁松,任利惠.用于高速列車動態仿真的軌道譜分析[J].鐵道學報,2002,24(5):21-27.
文獻標識碼:中文分類號:U270.1+.6;TP273A
DOI編碼:10.3969/j.issn.1006-1335.2016.01.005
文章編號:1006-1355(2016)01-0021-05
收稿日期:2015-05-20
基金項目:國家自然科學基金(51265009);華東交通大學研究生創新專項資金項目(YC2014-S265)
作者簡介:曹青松(1978-),男,安徽無為人,博士,副教授,研究方向:無損檢測、機電一體化以及振動控制E-mail:2000cqs@163.com
Study on the Predictive ControlAlgorithm for Train’sActive
Suspension Systems
CAO Qing-song,WANG Ming-xiang,TAOJing
(School of Mechanical and Electrical Engineering,East China Jiaotong University, Nanchang 330013,China)
Abstract:In order to effectively reduce the vibration of high-speed trains due to uncertain track interference incentives,an algorithm for active suspension prediction control based on a typical orthonormal base function,the Laguerre function,was proposed and studied.The state space model of the train’s active suspension system was set up.Regarding this model as a predictive control model and combined with the basic principle of rolling optimization in predictive control,the predictive controller for the active suspension system of the high-speed train in continuous time domain was designed.The simulation results show that the designed predictive controller can optimize the active vibration control performance of the high-speed train and improve the ride comfort of vehicles.
Keywords:vibration and wave;track interference incentive;active suspension;orthogonal base functions;state space model;predictive controller