UPFC抑制系統區域間低頻振蕩研究
2016-08-06 08:28:56范子愷
電力工程技術 2016年1期
范子愷,吳 熙,馮 雙
(東南大學電氣工程學院,江蘇南京210096)
統一潮流控制器技術應用
UPFC抑制系統區域間低頻振蕩研究
范子愷,吳 熙,馮 雙
(東南大學電氣工程學院,江蘇南京210096)
文中從負阻尼機理的角度出發,著重分析了統一潮流控制器(UPFC)對于區域間低頻振蕩的影響,指出穩定控制器(PSS)在區域間低頻振蕩抑制作用上的不足,并由此引出利用UPFC抑制低頻振蕩的必要性和優勢,在此基礎上提出了通過UPFC抑制區域間低頻振蕩的方法。通過數學分析探討了在未引入附加阻尼控制器狀態下UPFC控制系統對線路阻尼的貢獻,并利用功率注入法建立UPFC的PI控制模型,采用特征值法分析UPFC在小干擾下對于系統動態穩定性能的改善,通過算例分析證實UPFC抑制低頻振蕩方法的效果。
低頻振蕩;柔性輸電技術(FACTS);UPFC;PI控制
自上世紀60年代美國在線路互聯過程中發生功率增幅振蕩起,低頻振蕩成為電力系統穩定運行的重要課題之一。系統發生低頻振蕩時,如果振蕩不能得到有效抑制,則有可能帶來事故擴大,系統解列等危害[1]。目前已有的抑制低頻振蕩的方法主要有利用電力系統穩定控制器(PSS)進行抑制,通過調節柔性輸電技術(FACTS)設備進行抑制以及加裝直流小信號調制的方法。FACTS設備在調節系統設計上具有類PSS的特點[2],可以采用類似于PSS的方式對系統阻尼進行調控,而FACTS設備本身往往用于系統的潮流控制,因此可安裝于系統聯絡線處,從而得以抑制系統聯絡線處的低頻振蕩。統一潮流控制器(UPFC)是一種綜合了電壓控制與潮流控制的串并聯FACTS器件,是第三代FACTS裝置的典型代表。UPFC具有尺寸小,安裝方便以及成本低等優勢[3]。
文中給出UPFC控制方法的設計,并通過PSASP搭建UD模型,在IEEE四機兩區系統中實現了對UPFC抑制區域間低頻振蕩的小干擾法分析及時域仿真,證實了方法的有效性。
1 區域間低頻振蕩問題
1.1區域間低頻振蕩分析
低頻振蕩是由電力系統擾動引起的功率振蕩,負阻尼機理認為低頻振蕩是因為系統在調節過程中會產生與原阻尼相抵消的取值為負的阻尼而引起的。電力系統低頻振蕩按振蕩涉及的范圍大致分為局部振蕩模式、和區域間振蕩模式兩類[4],前者是指廠站內的機組之間或電氣距離較近的廠站機組之間的振蕩,這種振蕩局限于區域內,其影響范圍較小且易于消除。這種振蕩頻率較高,一般在0.7~2.5 Hz。后者是指一部分機群相對于另一部分機群的振蕩,在聯系較薄弱的互聯系統中,耦合的兩個或多個發電機群間常發生這種振蕩。由于電氣距離較大,同時發電機群的等值發電機的慣性時間常數較大,其振蕩頻率較低,一般在0.1~0.7 Hz。一個兩區域系統的示意圖如圖1所示。
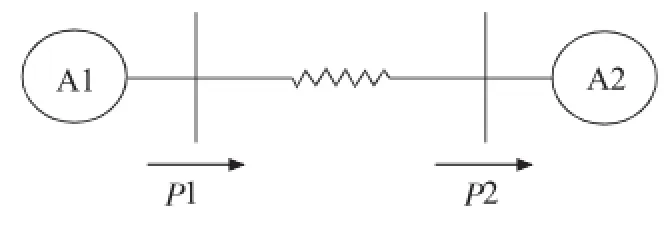
圖1兩區域系統示意
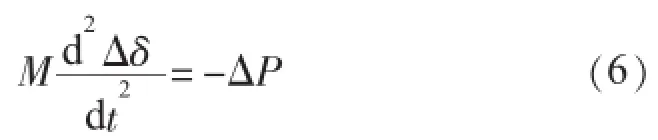
假設發生區間功率振蕩,區域1和區域2的慣性中心之間的角轉速差和角度差分別為ω12和δ12,并且為了方便討論,假設系統自身阻尼為0,則其表達式:
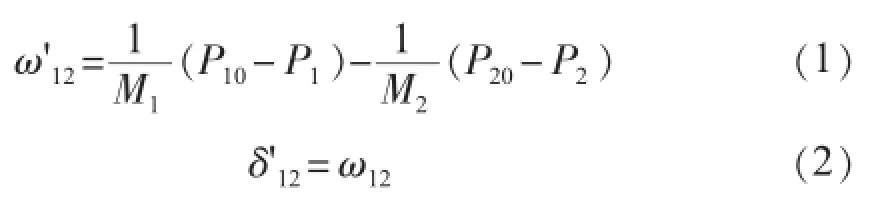
式(1,2)中P10和P20分別為所在區域的發電機在減去損耗后所發出的有功功率;M1和M2分別為2個區域的等效慣性系數。
則在系統零阻尼情形下,假設初始角度差為一定值,初始功角差為0,則由式(1)可得:

則對于零阻尼系統易得:

給出以下定義:
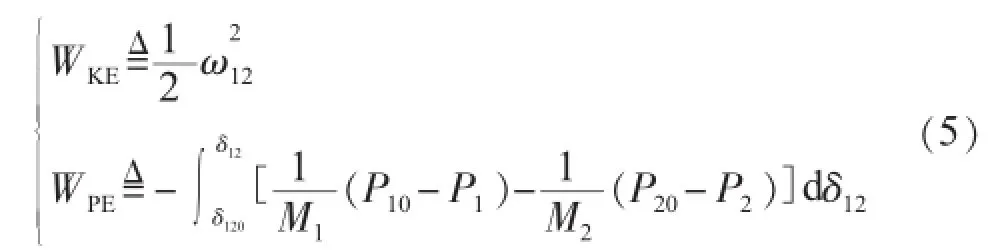
由式(5)可以看出,區域間振蕩具有動能和勢能2種形式,在零阻尼狀態下振蕩能量不衰減,因此也可通過增加聯絡線阻尼的方法,加速振蕩能量的消耗,從而達到抑制低頻振蕩的目的。
1.2 PSS抑制區域間低頻振蕩的不足
傳統的PSS是通過引入發電機功率ΔP、轉子頻率Δ f或角速度Δω信號,通過PSS的超前滯后補償,引入附加電磁轉矩ΔTs與Δω同相位,從而產生了附加的阻尼力矩,使得發電機所安裝線路的阻尼比提高。PSS安裝于發電機上,可以利用發電機提供的功率本身作為穩定系統的信號。FACTS安裝于線路上,可以在聯絡線上對系統阻尼進行控制,同時完成對于系統潮流的調節,相比PSS的使用更為靈活。另外,由于PSS的安裝地點受到限制,PSS對遠離發電機的線路阻尼優化較小,對于如圖1所示的2個區域系統而言,PSS可能無法抑制聯絡線上的低頻振蕩,即PSS對于區域間低頻振蕩抑制能力不理想,這時采用FACTS設備抑制低頻振蕩的方法就具有必要性了。
由以上分析可知,低頻振蕩的負阻尼機理認為低頻振蕩是由于系統阻尼為負值或者系統阻尼過低而產生的功率振蕩現象。對于區域內振蕩,其振蕩過程發生在電氣距離接近的設備之間,可以利用PSS抑制低頻振蕩。但對于區域間振蕩,PSS的抑制方能不能滿足系統的要求,從而需要采用UPFC來抑制低頻振蕩。
2 UPFC抑制低頻振蕩分析
2.1 UPFC提供阻尼的原理
分析UPFC抑制低頻振蕩的原理,且采用如圖2所示的單機無窮大系統來進行數學推導。
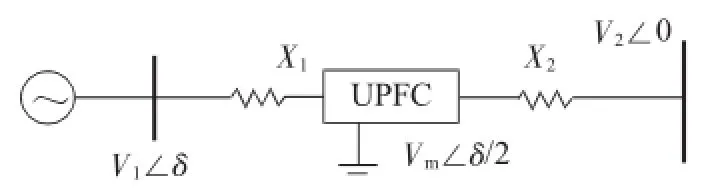
圖2單機無窮大系統
圖2的單機無窮大系統中已經安裝UPFC,系統在恒機械功率輸入下的線性化微分方程為:
輸電線路輸送的電功率為:

將式(7)線性化,進一步假設送端電壓保持恒定,即ΔV=0,得:

若保持Vm=c,ΔVm=0,ΔX2=0,,式(8)可化為:

式(9)特征值落在復平面的虛軸上,導致轉子角δ以頻率ωn作等幅振蕩,系統處于臨界穩定狀態。從方程可以看出,如果對UPFC進行恒定電壓或阻抗的控制,UPFC不能向線路提供任何阻尼,如果終點電壓和線路阻抗可以進行調制,則UPFC便可以發揮增加系統阻尼的作用。不妨假設電壓或線路阻抗按調制,則有那么相應地式(9)變為:
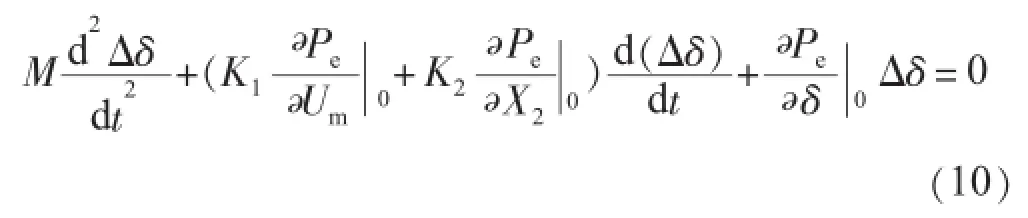
式(10)刻畫了系統阻尼振蕩的模式。
由上述內容可知,在合理的控制策略下,UPFC控制系統可提供一個正阻尼,改變特征根的形式,從而改變系統振蕩衰減的形式。以上推導盡管是以單機無窮大系統為例的,但是在多機系統中也同樣適用。
2.2 UPFC抑制振蕩策略
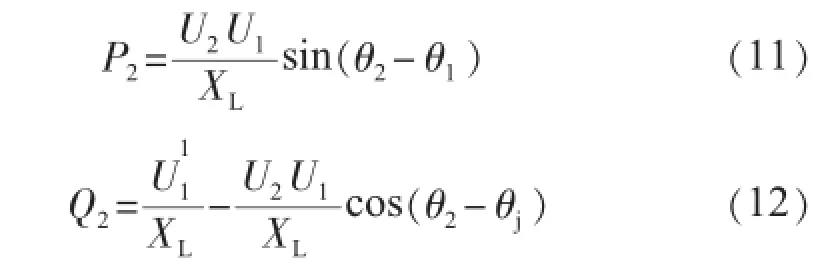
線路中的UPFC由2個共用直流側電容的電壓源型換流器組成,換流器I通過一個并聯變壓器接入系統,向換流器II提供有功功率外,同時通過并聯變壓器向系統吸收或注入無功功率。變換器II通過串聯變壓器接入系統,向線路注入一個幅值和相角可調的串聯電壓,控制線路的潮流。可以在不同的模式下實現對無功、有功功率以及電壓的多個變量的調控。采用功率注入模型等效UPFC電路。圖3(a)為UPFC串聯側等效電路,UPFC的作用主要體現在串聯側電壓經過串聯變壓器漏抗Xse接入到系統中,如果忽略線路電阻的影響,易得線路的有功功率和無功功率為:
若以U1方向為基準,相應的電壓電流相量圖如圖3(b)所示。
由有功功率、無功功率的形式可得:
通過式(13,14)可知,線路潮流受到串聯側電壓Use的控制。

圖3串聯側等效電路及電壓電流相量
根據以上分析,設δ=θ2-θj,代入式(13,14)易得:

通過分析可知,電壓U2,Uj的相位差主要影響線路傳輸的有功功率,而U2的幅值主要影響線路傳輸的無功功率,因此通過δ和U2就可以實現對系統有功功率和無功功率的控制。將串聯側的輸出電壓Use以U1為基準正交分解為Usep和Useq,則Usep主要通過U2影響無功功率,Useq則可實現對有功功率的控制。基于這一原理,可設計如下PI控制器,如圖4所示。以有功功率和無功功率偏差量作為反饋,實現對串聯側控制。
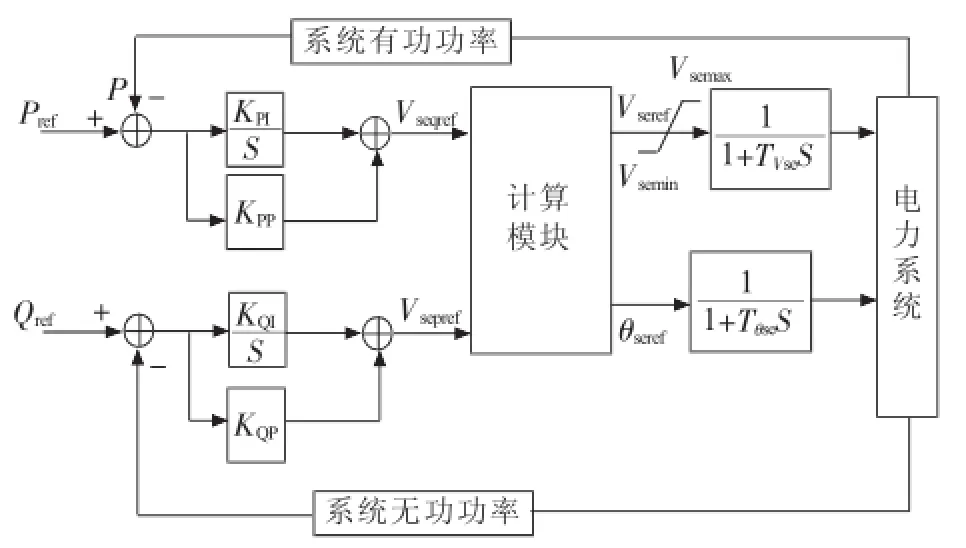
圖4 UPFC串聯側控制
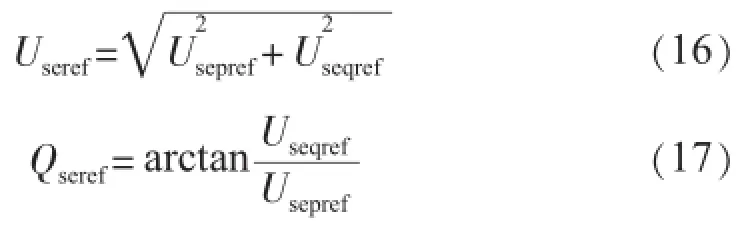
其中計算環節的參考量計算方法為:
采用類似的分析方法,分析并聯側功率控制的特點,當并聯側電壓Ushq小于輸入端電壓U1,并聯側電流Ishq按規定正方向為負值,此時并聯側換流器吸收感性無功功率,反之,并聯側換流器吸收容性無功功率。因此通過控制Ushq的大小,可從系統吸收或發出無功功率,并調節無功功率的大小,可以得到并聯側控制策略,如圖5所示。
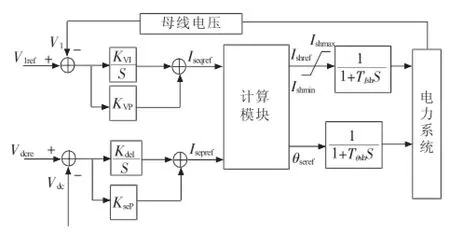
圖5 UPFC并聯側控制框圖
其中計算模塊的參考值計算方法為:
結合前文推導過程,由式(10)可知,將反饋信號引入控制信號輸入節點,即可對系統產生一個正阻尼,這種阻尼控制方法可以不增加線路容量,利用本身安裝在線路中的UPFC,靈活方便,性能良好。
3 算例分析
3.1四機兩區系統振蕩模態分析
在PSASP軟件中對IEEE的四機兩區系統標準模型做具體的算例分析,系統接線如圖6所示,系統參數已轉換成100 MV·A的標幺值[5]。
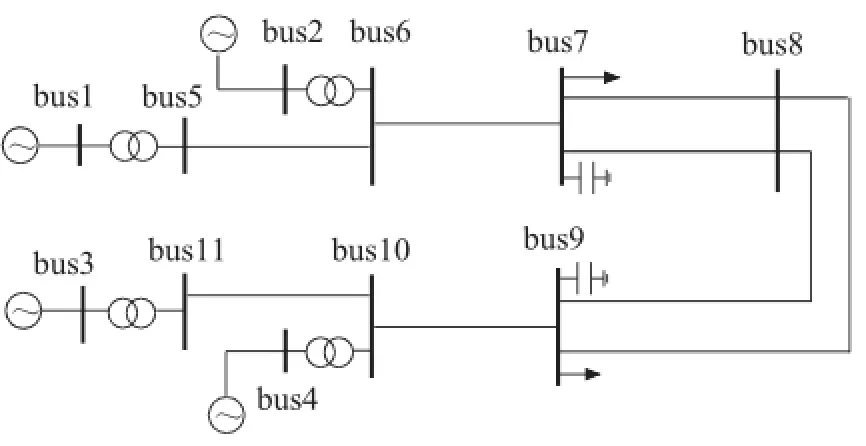
圖6四機兩區系統結構
在PSASP中搭建四機兩區模型,先對該系統進行潮流分析,得出穩定的潮流結果,然后對該系統進行小干擾分析,得出該系統振蕩模式,如表1所示。系統中存在3低頻振蕩模式,其中特征根1為聯絡線上的低頻振蕩,而特征根2,3分別為區域左側以及區域右側機電振蕩的振蕩模式。
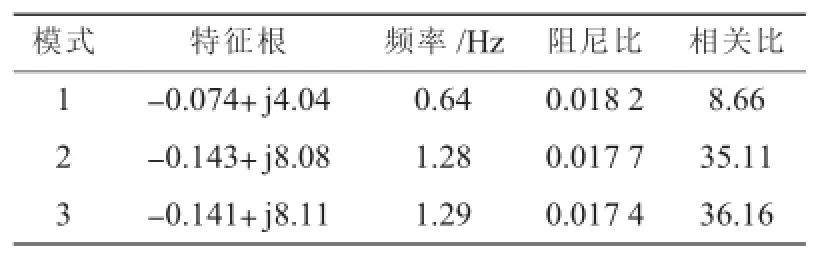
表1原始系統模態分析結果
3.2 PSS抑制低頻振蕩效果分析
在發電機端安裝PSS裝置,對該系統進行小干擾分析,得出該系統振蕩模式,如表2所示。從表2中可以看到,線路兩側的阻尼比分別為3.7%和5.6%,系統兩側振蕩模式為強阻尼模式。但是系統聯絡線的阻尼比僅為1.8%,聯絡線屬于弱阻尼振蕩,不能滿足系統穩定性的要求。
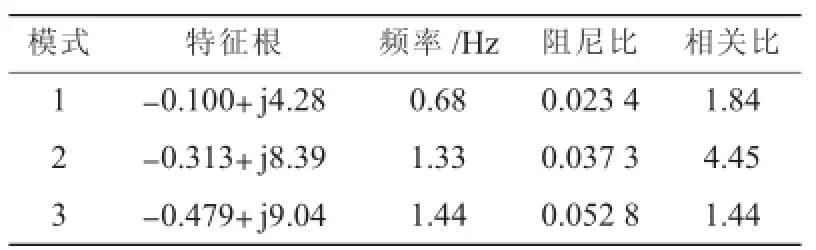
表2含PSS系統模態分析結果
由此可以發現系統兩側低頻振蕩得到抑制,但系統聯絡線仍未得到有效改善。說明僅通過PSS是不能滿足系統要求的,PSS受到各種因素的限制,對區域間低頻振蕩的抑制效果不佳。
3.3 UPFC抑制低頻振蕩效果分析
將UPFC加裝在系統聯絡線上,根據潮流分析的結果,可定義UPFC PI控制參數,對該系統進行小干擾分析,得出該系統振蕩模式,如表3所示。可以看出聯絡線上阻尼比大幅度提升,其阻尼比最高可達23.9%,此時聯絡線上的區間振蕩將快速衰減,同時區域兩側的低頻振蕩阻尼比也達到指標要求,分別為3.6%和5.3%,系統內的振蕩模式均為強阻尼模式,不存在負阻尼模式與弱阻尼模式,因此系統振蕩均可在較短時間內衰減,避免造成事故的擴大化。

表3含UPFC與PSS系統模態分析結果
圖7為系統在非持續性小擾動下系統聯絡線的功率振蕩情況.其中功率單位為MV·A,其穩定潮流有功功率由參數設定可知為3.975 MW,在系統中加入小擾動,容易觀察到,對于不含UPFC的系統聯絡線,系統存在弱阻尼低頻振蕩,而安裝了UPFC的振蕩幅值快速衰減,系統聯絡線的穩定性顯著提高。證實了UPFC在抑制系統低頻振蕩方面的有效性。
圖7中同時包含了UPFC與PSS對聯絡線功率振蕩的影響的對比,不難發現UPFC對抑制聯絡線功率振蕩的效果明顯優于PSS,實際上PSS的抑制效果并不能滿足抑制低頻振蕩的要求。這也符合表中特征值分析的結果。
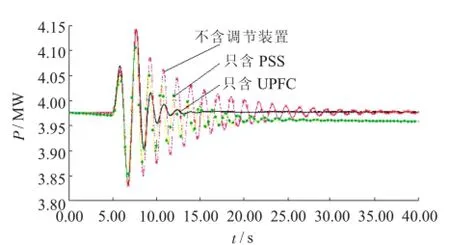
圖7聯絡線功率對比
4 結束語
在分析了低頻振蕩機理的基礎上,對UPFC抑制區域間低頻振蕩展開了研究。通過數學推導可知UPFC在合理的控制策略下可以向聯絡線路提供正阻尼,從而有效抑制區域間低頻振蕩,彌補PSS在區域間振蕩上的不足。文章建立了UPFC的數學模型,并在PSASP中根據該動態數學模型建立起UPFC用戶自定義模型,對其進行特征根分析和時域仿真。
[1]馬燕峰.電力系統低頻振蕩的協調阻尼控制研究[D].北京:華北電力大學,2010.
[2]張 芳,房大中,陳家榮,等.阻尼聯絡線低頻振蕩的UPFC兩階段控制方法研究[J].中國電力,2006(39):27-32.
[3]楊尚瑾.統一潮流控制器(UPFC)多目標協調控制及穩定控制策略研究[D].北京:中國電力科學研究院,2013.
[4]朱鵬程.用于UPFC的串、并聯雙變流器控制策略研究[D].武漢:華中科技大學,2005.
[5]EBERHART R C,SHI Y.Comparison Between Genetic Algorithms and Particle Swarm Optimization[M].EUolutionary Programming VII,Lecture Notes in Computer Science 1447,Springer,1998:611-616.
Study on the Restrain of Inter-area Low Frequency Oscillation by UPFC
FAN Zikai,WU Xi,FENG Shuang
(School of Electrical Engineering,Southeast University,Nanjing 210096,China)
The paper has a detailed analysis on the inter-area low frequency oscillation in aspects of negative-damping effect. Then it proposes the approach of utilizing UPFC to restrain low frequency oscillation after analyzing the disadvantage of PSS in the condition of inter-area oscillation.The paper studies how UPFC contributes to the damping of lines without an additional damping controller,and then proposes a PI control model based on power injection method.A small signal analysis of transient stability with UPFC is proposed.Simulations results show that UPFC is effective to improve transient stability.
low frequency oscillation;FACTS;UPFC;PI control
TM761
A
1009-0665(2016)01-0020-04
2015-10-19;
2015-11-30
范子愷(1993),男,江蘇徐州人,碩士研究生,從事電力系統運行控制方向的研究;
吳熙(1987),男,江蘇靖江人,副研究員,研究方向為電力系統運行控制;
馮雙(1990),女,江蘇南京人,博士研究生,從事電力系統運行與控制的研究工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44