基于北斗授時的太陽能跟蹤匯集裝置
2016-08-07 16:15:34劉奧龍帥宇杰沙鑫寬李奇恩金永星
大科技 2016年1期
劉奧龍 帥宇杰 沙鑫寬 李奇恩 金永星
(上海電機學院 上海市浦東新區 201306)
基于北斗授時的太陽能跟蹤匯集裝置
劉奧龍 帥宇杰 沙鑫寬 李奇恩 金永星
(上海電機學院 上海市浦東新區 201306)
隨著硅晶技術的發展與日漸成熟,太陽能發電被廣泛的應用在商業、農業、生活等各個方面。給我們的生活帶來了極大的便利。本文提供了一種基于北斗授時的太陽能跟蹤匯集裝置,通過北斗的授時定位,控制電機的驅動,讓太陽能發電裝置能夠較好的跟蹤太陽光照的方向,從而達到對太陽能的有效利用[1]。
太陽能;北斗授時定位
1 引言
隨著近年來硅晶技術的發展與日漸成熟,太陽能發電被廣泛的應用于商業、生活等各個方面。但相對于國外來說,國內的太陽能跟蹤裝置發展相對薄弱。隨著將來太陽能發電的大力發展。太陽能的利用率也將會成為一個至關重要的作用。而基于北斗授時的太陽能跟蹤匯集裝置將在一定程度上較好的提高太陽能的利用率,有著很大的發展空間。
2 系統功能
本文所述基于北斗授時定位的太陽能跟蹤匯集裝置總體思路是通過嵌入式硬件與北斗模塊通訊獲取太陽能板所在位置和當前時間,北斗導航系統擁有更高的授時定位精度和更短的授時定位時間且更加安全,再通過太陽定位算法實時計算出太陽方位角和高度角,最終由步進電機驅動器來驅動雙軸電機調整太陽能電池板以最大角度接受太陽能,實現追光。
3 系統框架設計
本設計控制方式通過MCU控制模塊作為核心,由北斗通訊模塊作為方向指揮來控制電動機的轉向,就是由北斗模塊定位太陽的位置,信號傳遞給MCU控制模塊后,經過計算來將下一步信號分別傳遞給高度角步進電動機驅動器和方向角步進電動機驅動器,通過驅動電動機完成時刻跟蹤太陽位置,達到任何時刻都能接受最大太陽能的目的。北斗授時的太陽能跟蹤匯集裝置工作流程圖如圖1所示。
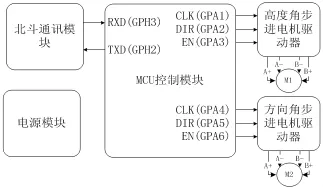
圖1 北斗授時的太陽能跟蹤匯集裝置工作流程圖
4 硬件電路設計
本系統以嵌入式系統作為硬件平臺,按功能分為電源模塊、MCU控制模塊、北斗通訊模塊及步進電動機驅動模塊。
4.1 電源模塊
本裝置使用交流220V電源供電,經變壓器得到18V交流電源供電動機使用,再通過穩流和三端穩壓集成電路,LM7805穩壓后得到5V供電電壓。
4.2 MCU控制模塊
MCU控制模塊采用天嵌科技公司的TQ2440嵌入式系統,其主要外圍電路包括復位電路、時鐘電路、JTAJ電路及供電電路。MCU控制模塊分別通過UART口和通用I/O端口與北斗通訊模塊、步進電動機驅動模塊連接。
4.3 北斗通訊模塊
本裝置使用和芯星通公司UM220芯片[2],接收北斗衛星的數據信息,獲取地理位置和時間信息。采用UM220芯片有以下優點:
(1)同時能支持BD2 B1,GPS L1兩個頻點;
(2)芯片集成度高,功耗小;
(3)通過芯片內部算法優化,定位精度為3m左右,時間精度為20nm,測速精度為0.1m/s,完全滿足系統使用要求。
4.4 步進電動機驅動模塊
本裝置使用86BYC250A步進電動機。S3C2440通過提供兩路脈沖(CLK)、方向(DIR)和使能(EN)信號為配套的86型步進電動機驅動器驅動。
5 結語
本裝置使太陽能發電跟蹤裝置能夠較好跟蹤太陽光照的方向,讓太陽能更加有效、便捷的被利用。使用相同的太陽能追光算法基礎上,基于北斗授時的太陽能跟蹤匯集裝置比較于傳統的GPS定位而言,有著更快的響應速度。同時作為中國自主研發的定位系統,核心技術讓北斗芯片比GPS擁有更安全、更低價的前景[3]。
課題項目:2015年度上海大學生創新活動計劃課題(A1-5701-15-012-01-005)。
[1]趙爭鳴,陳劍,孫曉瑛.太陽能光伏發電最大功率點跟蹤技術[J].電子工業出版社,2012(4).
[2]和芯星通科技有限公司.UM220用戶手冊[EB/OL].[2014-01-13].
[3]楊元喜.北斗衛星導航系統的進展、貢獻與挑戰[J].測繪報,2010,39(1):1~6.
TM914.4
A
1004-7344(2016)01-0302-01
2015-12-20
