基于GSL科學計算庫的主動定向浮標信號處理算法實現*
2016-08-10 03:23:21楊緒峰凌震瑩
艦船電子工程 2016年7期
楊緒峰 喬 斌 凌震瑩 張 雷
(中國船舶重工集團公司第七一五研究所 杭州 310023)
?
基于GSL科學計算庫的主動定向浮標信號處理算法實現*
楊緒峰喬斌凌震瑩張雷
(中國船舶重工集團公司第七一五研究所杭州310023)
摘要利用GSL開源科學計算庫的強大計算功能,實現了主動定向浮標信號處理的編碼。采用互譜法求CW回波信號目標方位,依據目標多普勒頻移來測速。并做了距離方位可視化顯示,使得目標方位顯示直觀明了。
關鍵詞GSL科學計算庫; 聲納浮標; 矢量水聽器; 互譜法
Class NumberTN219
1引言
浮標系統[1~3]按照作用功能,分為溫深浮標、海洋環境噪聲浮標、全向浮標[4]、定向浮標[5];按照工作方式,分為被動浮標[6]和主動浮標。其中,主動全向浮標的換能器只能得到質點聲壓信息,一枚主動全向浮標只能確定一個目標距離圓和一個徑向速度,單枚浮標不具備測向功能。主動定向浮標采用矢量水聽器,單枚浮標不僅能精確測定目標距離和徑向速度,還實現了目標方位測量,提高了單枚浮標的使用效率。
2原理
2.1主動定向浮標[7]信號處理
主動定向浮標采用矢量水聽器,不僅能得到聲壓信息,還能測量質點振速信息,這使得單枚主動定向浮標便具備測向功能。采用互譜法進行方位計算,能抵抗各向同性噪聲干擾。互譜法由東西、南北互相垂直方向的互功率譜經過反正切計算得到,而目標速度信息則依靠目標多普勒頻移來計算。
2.2距離-方位可視化原理
互譜法求得的是距離-頻率維下的振幅-方位值,直接用來顯示不能直觀明了地觀測到目標方位。有必要轉化為距離-方位維下的振幅值可視化顯示。
如圖1所示,首先建立距離-角度(R-θ)坐標系下的振幅(A)三維空間, 對距離-方位空間(R-B)上的每一點(ri,bk)∈[R,B],取最大振幅:
A(ri,bk)=max{Aj1(ri,bk,fj1),…,Aj2(ri,bk,fjN)}
(12)
A(ri,bk)映射到距離-角度(R,θ)空間
(13)
得到了距離-角度(R,θ)空間的振幅值A(ri,θk)顯示結果。
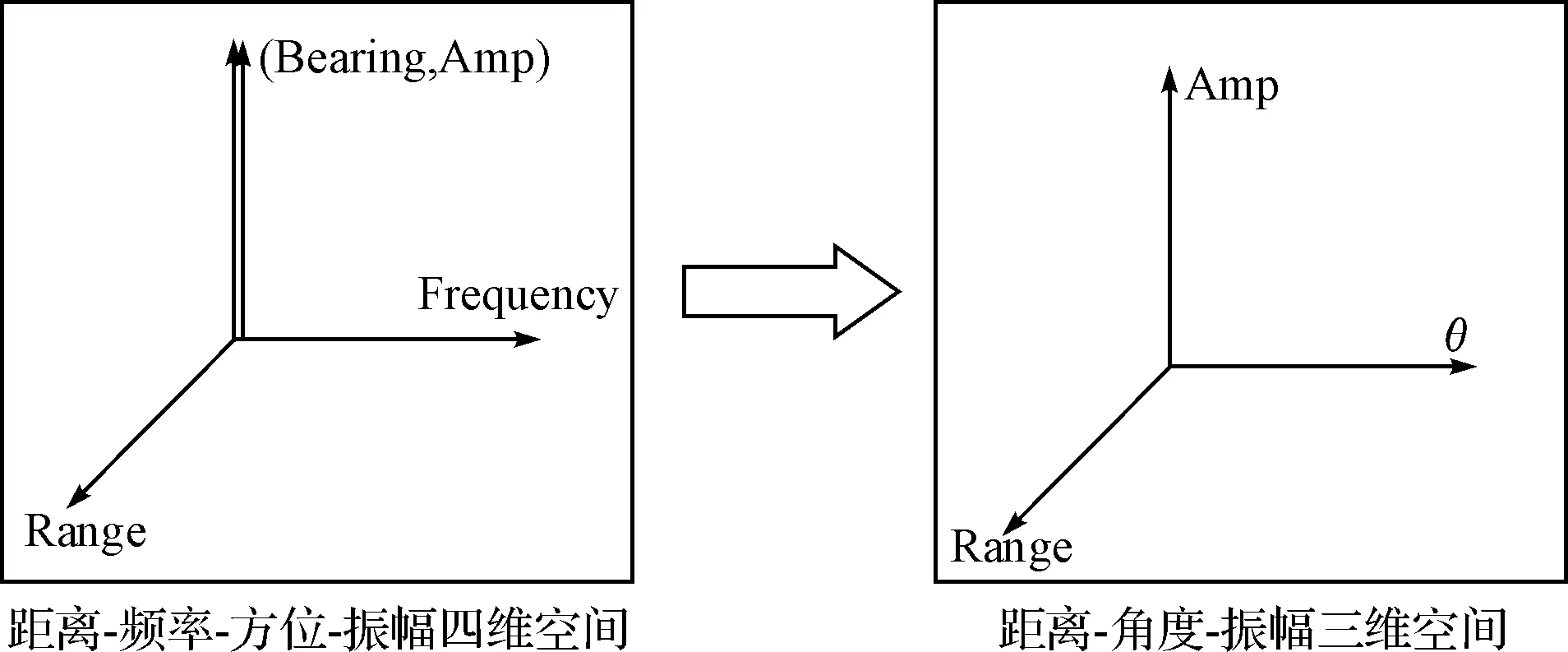
圖1 (R-F-B-A)四維空間到(R-θ-A)三維空間的變換
2.3GSL開源科學計算庫介紹
GNU科學計算庫(GNU Scientific Library)[8]是一個跨平臺的科學計算庫。它以C語言為底層開發語言,開發出向量、矩陣運算、數值計算、傅里葉分析、小波分析、統計分析等科學計算庫,并封裝成API接口,方便編程人員直接調用并做進一步的高層次開發。GSL開源庫節省了編程人員從最底層編寫科學計算代碼的過程,提高了編程效率。由于GSL科學計算庫是一個開源計算庫,可以方便編程人員直接使用,擴大了編程用戶群體。
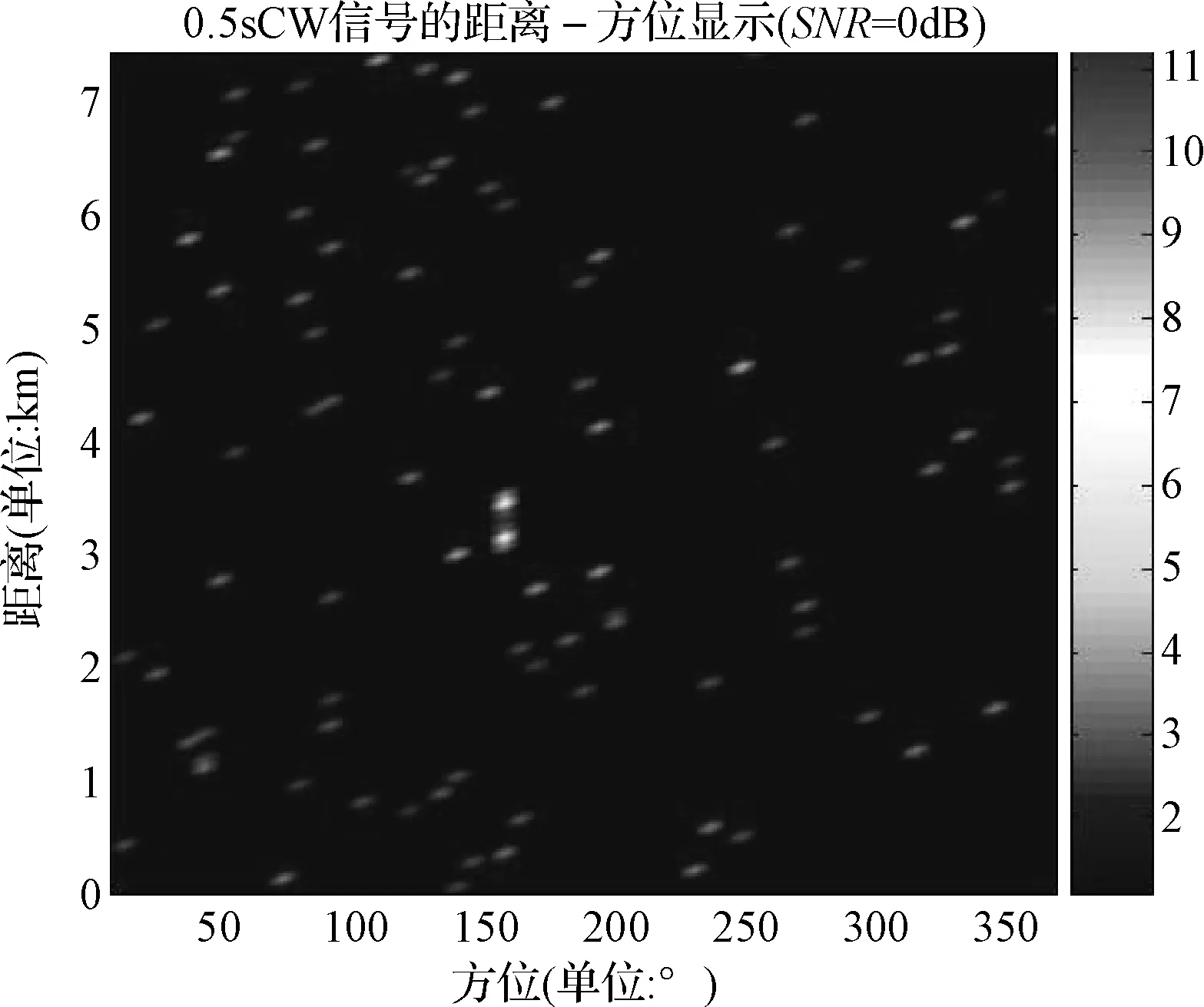
3算法設計與軟件實現
3.1三路信號預處理
經矢量水聽器接收的全向信號是由矢量水聽器的聲壓信息得到,兩路正交的東西、南北信號由質點振速信息得到。假設目標方位為θ,全向、東西、南北三路CW時域信號分別為XOm、XEW和XNS,則三路信號有如下關系:

圖2 信號預處理流程
(1)
(2)
經矢量水聽器接收的全向、東西、南北三路CW時域信號,都要做預處理。首先經過復解調將信號的中心頻率搬移到零頻;然后對時域信號做FFT得到信號的頻譜;經過譜線選擇,得到了全向、東西、南北三路CW信號的譜數據。
全向、東西、南北三路CW時域信號經FFT變換為頻譜數據的公式為
(3)
=YOm(k)·sin(θ)
(4)
=YOm(k)·cos(θ)
(5)
經過3.1節的預處理,得到三路信號的頻譜,對全向頻譜數據進行求模運算,便得到距離-頻率維下的振幅值。公式為
YABS=abs|YOm(k)|
(6)
CW信號預處理程序代碼如下:
// inData輸入時域數據
//index numPerbich輸入數據批次與點數
//nfft ndft fft與dft點數
//sel_out selnum譜線選擇輸出結果與點數
_LOCAL_ void CWPreProc(double *inData, int index, gsl_complex *sel_out, int numPerbich, int ndft, int nfft, int selnum)
{
int i;
//復解調
// cwppReal復解調輸出實部
// cwppImag復解調輸出虛部
//FC FS 信號中心頻率與采樣率
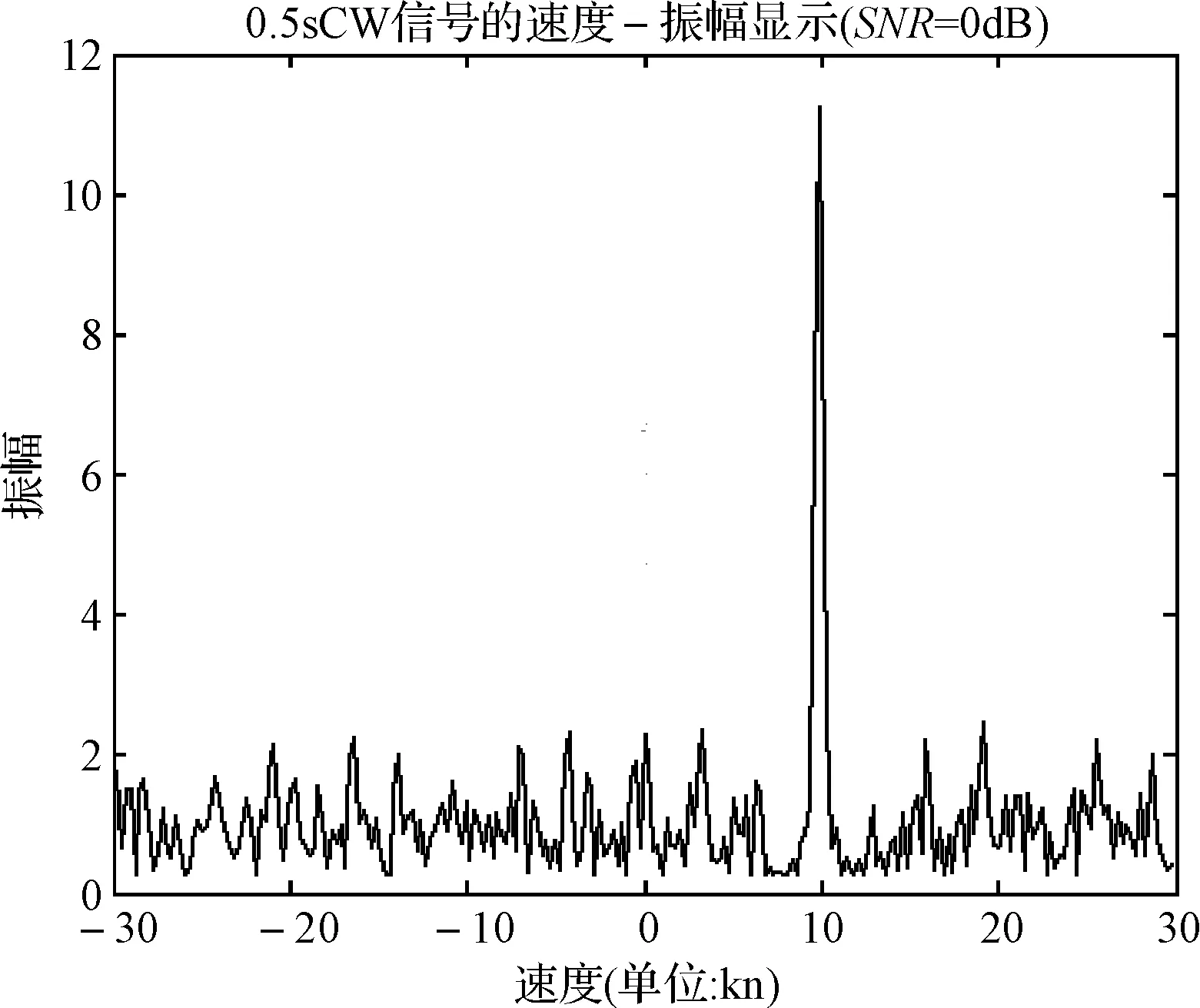
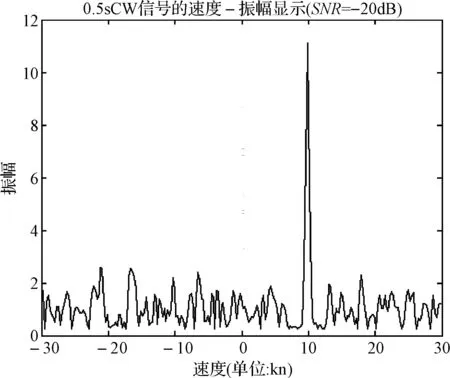
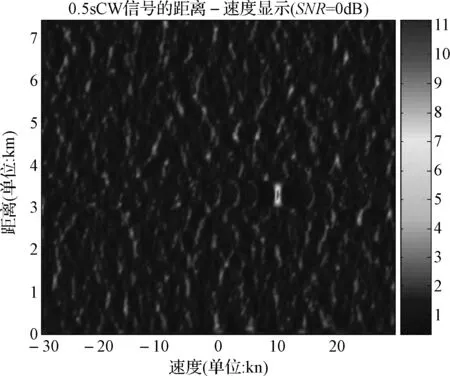
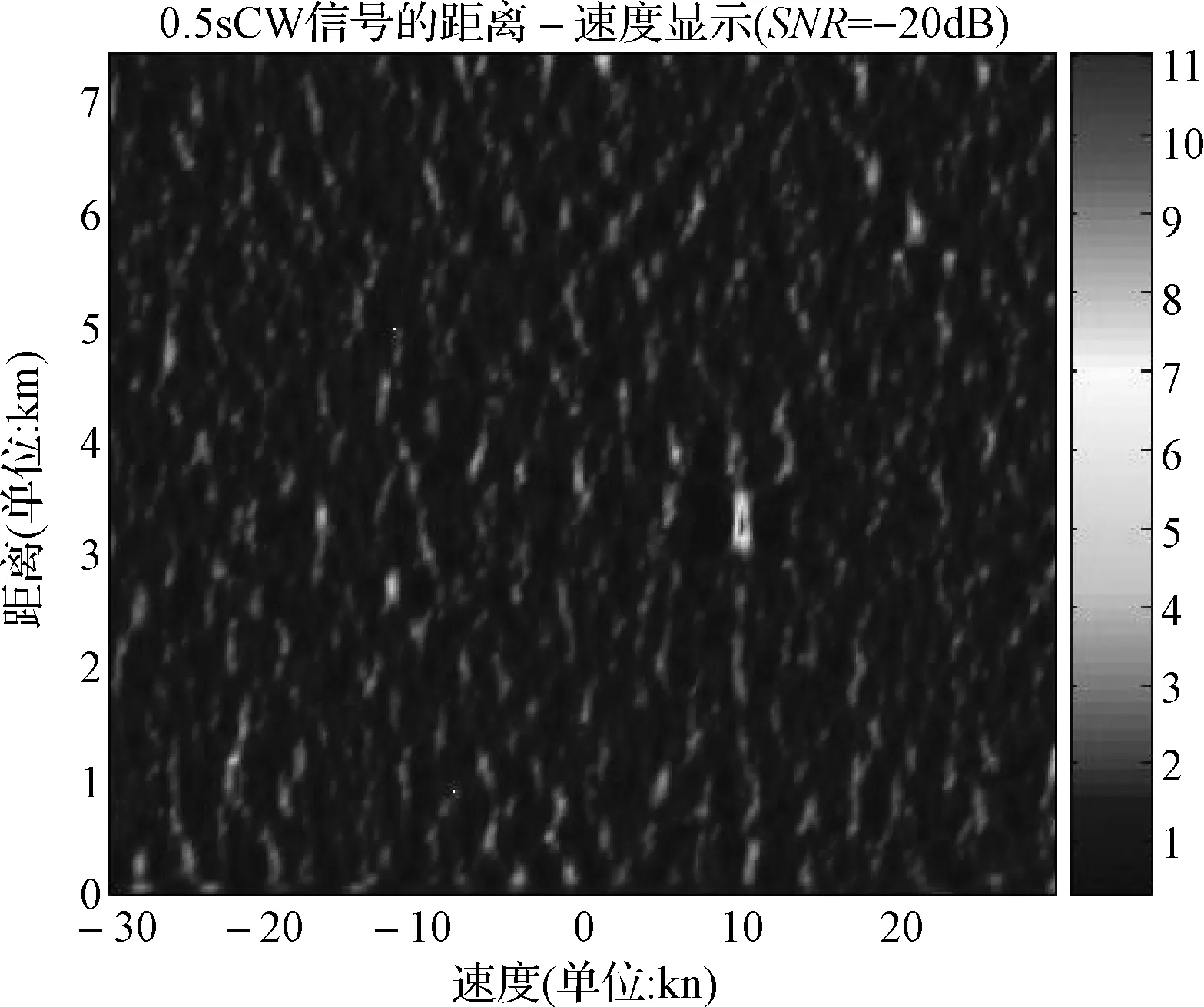
for(i=0;i { cwppReal[i] = *(inData+i) *cos(2*pi*(index*numPerbich+i)*FC/FS); cwppImag[i] = *(inData+i) *sin(2*pi*(index*numPerbich+i)*FC/FS); } //重疊FFT //DFT舊矩陣右移 // cwppDFT_real cwppDFT_ imag DFT數據實虛部 GslVectorCpy(cwppDFT_real, 1, cwppDFT_real+numPerbich, 1, ndft-numPerbich, 1); GslVectorCpy(cwppDFT_imag, 1, cwppDFT_imag+numPerbich, 1, ndft-numPerbich, 1); //左邊添加新進復解調點 GslVectorCpy(cwppReal, 1, cwppDFT_real, 1, numPerbich, 1); GslVectorCpy(cwppImag, 1, cwppDFT_imag, 1, numPerbich, 1); //實數向量化復數向量 //cwppDFT_compx DFT復數數據 GslVectorRect(cwppDFT_real, cwppDFT_imag, &cwppDFT_compx[0], nfft); //FFT GslVectorFFT((double *)cwppDFT_compx,cwppFFT_out,nfft); //譜線選擇 GslVectorCpy(cwppFFT_out+nfft-1-selnum, 1, sel_out,1, selnum, 1);//譜線選擇前半部分 GslVectorCpy(cwppFFT_out, 1,sel_out +selnum,1, selnum, 1);//譜線選擇后半部分 } 3.2互譜法計算目標方位并顯示 利用互譜法[9~10]計算目標方位的流程圖如圖3所示,東西、南北CW譜數據分別與全向譜數據共軛相乘,得到全向-東西互功率譜和全向-南北互功率譜,公式為 圖3 互譜法測向流程圖 IOm_EW(k)=YOm(k)YEW(k)* =YOm(k)YOm(k)*·sin(θ) (7) IOm_NS(k)=YOm(k)YNS(k)* =YOm(k)YOm(k)*·cos(θ) (8) (9) 4實驗仿真 仿真實驗中,設定目標距離為3km,目標方位為150°,速度為10節。在0dB、-20dB不同信噪比下,0.5s脈寬下的CW信號距離-速度、距離-方位探測結果見圖4~圖9。 4.1速度-振幅顯示 圖4 速度-振幅顯示(SNR=0dB) 圖5 速度-振幅顯示(SNR=-20dB) 4.2距離-速度顯示 圖6 距離-速度顯示(SNR=0dB) 圖7 距離-速度顯示(SNR=-20dB) 4.3距離-方位顯示 圖8 距離-方位顯示(SNR=0dB) 圖9 距離-方位顯示(SNR=-20dB) 5結語 本文基于GSL科學計算庫進行主動定向浮標信號處理的軟件編碼。利用GSL科學計算庫中提供了大量的科學計算API接口,使得軟件編碼變得簡捷高效。同時,給出了距離-方位可視化顯示,使得圖形界面顯示更加直觀。 參 考 文 獻 [1] 潘勤升.聲吶浮標最新進展[J].聲學與電子工程,1991(24):45-48. [2] 尹曉東,劉清宇,徐江.國外航空聲學探潛裝備研究進展[J].聲艦船科學技術,2008(30):175-172. [3] 凌國民,王澤民.聲吶浮標技術及其發展方向[J].聲學與電子工程,2007(87):1-5. [4] 潘勤升.主動全向聲吶浮標系統簡介[J].聲學與電子工程,1994(33):41-39. [5] 潘勤升.被動定向聲吶浮標系統[J].聲學技術,1992(Z1):76-78. [6] 潘勤升.被動聲納系統在多干擾源場景下的探測性能分析[J].艦船電子工程,2016(36):133-138. [7] 潘勤升.主動定向的聲吶浮標及系統[J].聲學與電子工程,1988(1):28-30. [8] Mark Galassi, Jim Davies,etal. GNU Scientific Library Reference Manual,2010(3):1-504. [9] 陳濤,韓強強,劉魯濤等.改進的基于互譜的寬帶信號測向算法[J].系統工程與電子技術,2014(36):879-883. [10] 劉伯勝,田寶晶.矢量傳感器估計目標方位的誤差的仿真研究[J].哈爾濱工程大學學報,2003(24):491-494. 收稿日期:2016年1月7日,修回日期:2016年2月22日 作者簡介:楊緒峰,男,碩士,助理工程師,研究方向:水聲信號處理與編碼。喬斌,男,碩士,高級工程師,研究方向:水聲信號處理與編碼。凌震瑩,女,碩士,高級工程師,研究方向:軟件編碼與軟件體系。張雷,男,碩士,高級工程師,研究方向:顯示控制與編碼。 中圖分類號TN219 DOI:10.3969/j.issn.1672-9730.2016.07.011 Realization of Directional Sonobuoy Signal Process Algorithm Based on GNU Scientific Library YANG XufengQIAO BinLING ZhengyingZHANG Lei (No.715 Research Institute of CSIC, Hangzhou310023) AbstractUsing the strong computing ability of GSL, coding Directional Sonobuoy signal process is realized. In our algorithm, target bearing of CW signal is calculated by cross spectrum method and target speed is calculated by Doppler frequency shift. In order to make target display intuitire and clear, range to bearing display visualization is done in this paper. Key WordsGNU scientific library, sonobuoy, vector hydrophone, cross spectrum method