獵雷ROV定位精度試驗方法研究*
2016-08-10 03:23:23李踐飛
艦船電子工程 2016年7期
高 峰 李踐飛
(1.91439部隊96分隊 大連 116041)(2.海軍潛艇學院 青島 266042)
?
獵雷ROV定位精度試驗方法研究*
高峰1李踐飛2
(1.91439部隊96分隊大連116041)(2.海軍潛艇學院青島266042)
摘要根據獵雷ROV組合導航系統工作原理,提出了以網絡RTK GPS定位輸出作為真值,與被試品定位輸出進行比對的方法來驗證獵雷ROV導航定位精度。在分析戰術技術指標的基礎上,提出了利用χ2檢驗法設計出試驗樣本量。結合作戰使用,設計出接近實際使用條件的海上試驗實施方案。最后給出了利用坐標轉換進行誤差解算和χ2假設檢驗的數據處理和結果評定方法。
關鍵詞獵雷; 定位精度; 試驗方法
Class NumberTJ61+7
1引言
獵雷(ROV Remotely-Operated Vehicle)是新型反水雷裝備,由潛航體、綜合控制系統、布放回收裝置、滅雷戰斗部、導航定位系統等組成。主要遂行對水雷的探測和定位,并引導艦船規避通過雷區,必要時攜帶滅雷炸彈和爆破割刀對水雷進行清除[1]。導航定位系統是獵雷ROV重要組成部分,裝配于潛航體上,功能是確定潛航體相對工作母船的位置以及大地坐標位置。獵雷ROV定位精度試驗的目的是在接近實戰使用條件下考核導航定位系統定位精度是否達規定的指標要求。
關于慣性導航系統定位精度試驗方面研究有:姚興太研究了慣性導航系統定位精度與試驗路徑的關系[2],董忠臣對潛航體定位精度考核方法進行了探討[3],李琳給出慣導系統最大定位誤差的極值分析方法[4],李壯給出了基于短基線的ROV實時高精度定位方法[5],刁中凱給出了使用差分GPS檢測火炮慣性導航定位精度的方法[6]。這些研究取得了許多成果,但這些研究只針對慣性導航定位精度試驗某一環節,未從整體對定位試驗進行研究。其次,對于獵雷ROV為平臺的慣性導航定位精度試驗缺乏針對性研究。
根據獵雷ROV慣性導航定位系統特點,立足于海上試驗實施,從樣本量設計、海上試驗航路設計和試驗保障方案等方面入手,給出了獵雷ROV定位精度試驗方法。研究對于考核獵雷ROV作戰使用性能,使裝備盡快形成戰斗力具有一定指導意義。
2獵雷ROV導航定位原理
獵雷ROV導航定位系統采用以捷聯式慣性導航系統為主的組合導航系統。單一采用捷聯式慣導系統,所提供的精度會隨著時間而漂移。在長時間內,導航定位誤差增長的速度主要由初始對準精度、系統所使用的慣性敏感器件缺陷和運載體運動軌跡的動態特性決定的[7]。雖然采用更高精度的敏感器件可以提高精度,但成本會大幅增加。獵雷ROV采用的是組合導航技術。運用外部導航信息來提高導航定位系統精度。
獵雷ROV組合導航系統以高精度激光捷聯慣性導航系統為基礎,組合多普勒計程儀和GPS接收機等外部輔助傳感器信息,利用卡爾曼濾波算法進行誤差估計,確保在動態環境下輸出高精度導航信息和姿態信息。導航定位系統組成原理圖見圖1。這種組合導航系統提供兩種具有互補特性的獨立信息源:GPS提供時間短精度高的數據,以位置信息的形式給出,對導航位置進行修正;多普勒計程儀提供時間長穩定性高的數據,主要對潛航體速度進行修正。
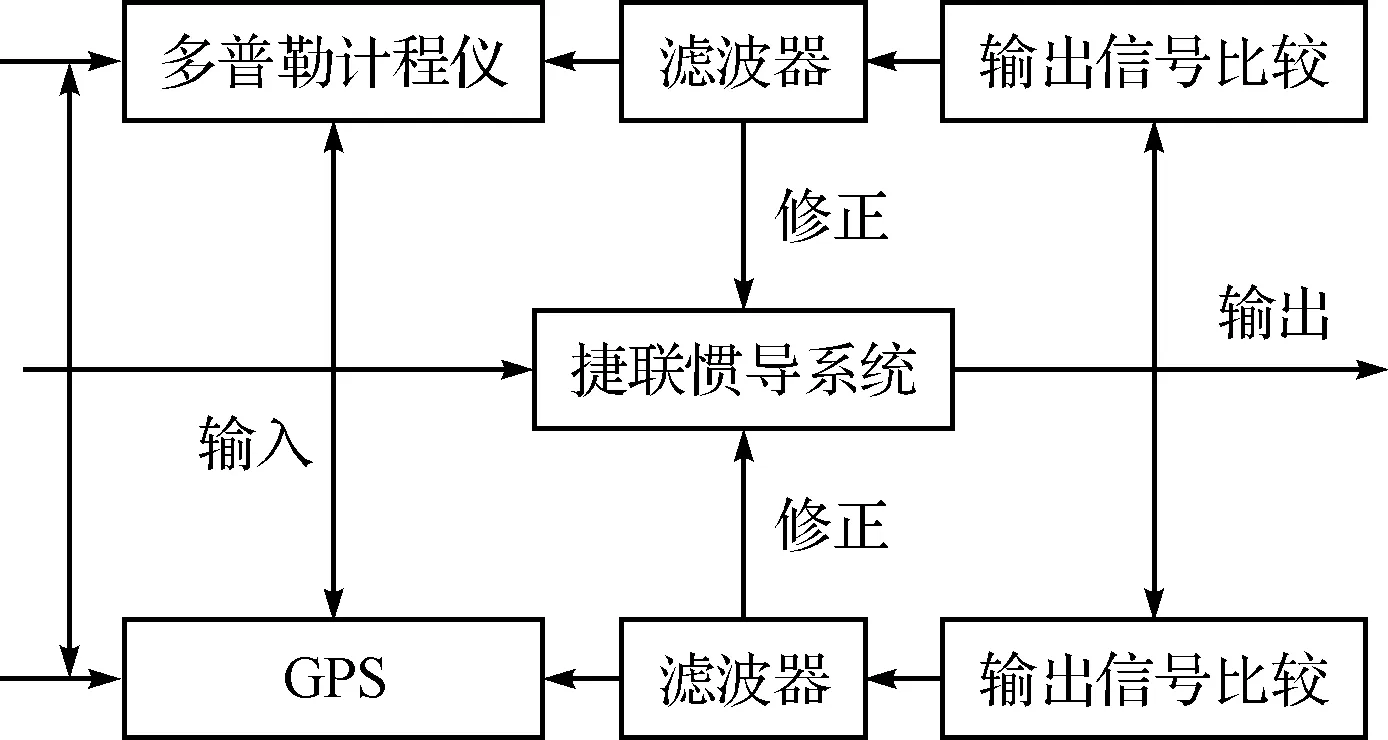
圖1 組合導航系統組成原理圖
3試驗方法選擇
對于以捷聯慣導為主體的組合導航系統精度試驗,以精度更高的慣導系統提供輸出作為真值作為比對,是一種常用方法,但這種方法要求提供比對的系統至少比被試品精度高一個數量級。慣導系統精度提高一倍,成本會成倍增長。另外考慮到安裝在潛航體也存在問題。綜合考慮,這種方法在試驗中實現起來存在困難。這里采用網絡RTK GPS輸出位置信息作為真值,比對組合導航系統輸出,來進行獵雷ROV定位精度評定。
網絡RTK GPS是一種集衛星大地測量技術、通信技術和計算機技術于一體空間信息實時服務技術。該技術利用CORS(Continuous Operational Reference System)建立連續觀測網絡,由于參考站坐標已知,即可精確地估計CORS間的空間相關誤差,并建立網絡范圍內的空間相關誤差區域模型,經此生成差分改正信息,并通過現代通信手段為用戶提供實時高精度定位,網絡RTK GPS水平定位精度可達1cm~3cm[8]。對比獵雷ROV組合導航系統定位精度,使用網絡RTK GPS作為真值進行比對能夠滿足試驗要求。
4試驗航次數確定
組合導航系統的誤差特性基本符合正態分布,航次越少,則與正態分布的差異越大。慣導系統試驗周期長,試驗的航次數應預控制。試驗的航次設計,可依據子樣標準偏差為χ2分布,建立置信度,置信區間和試驗航次之間的關系為

經查χ2分布表并計算得到航次數與置信區間關系如表1。
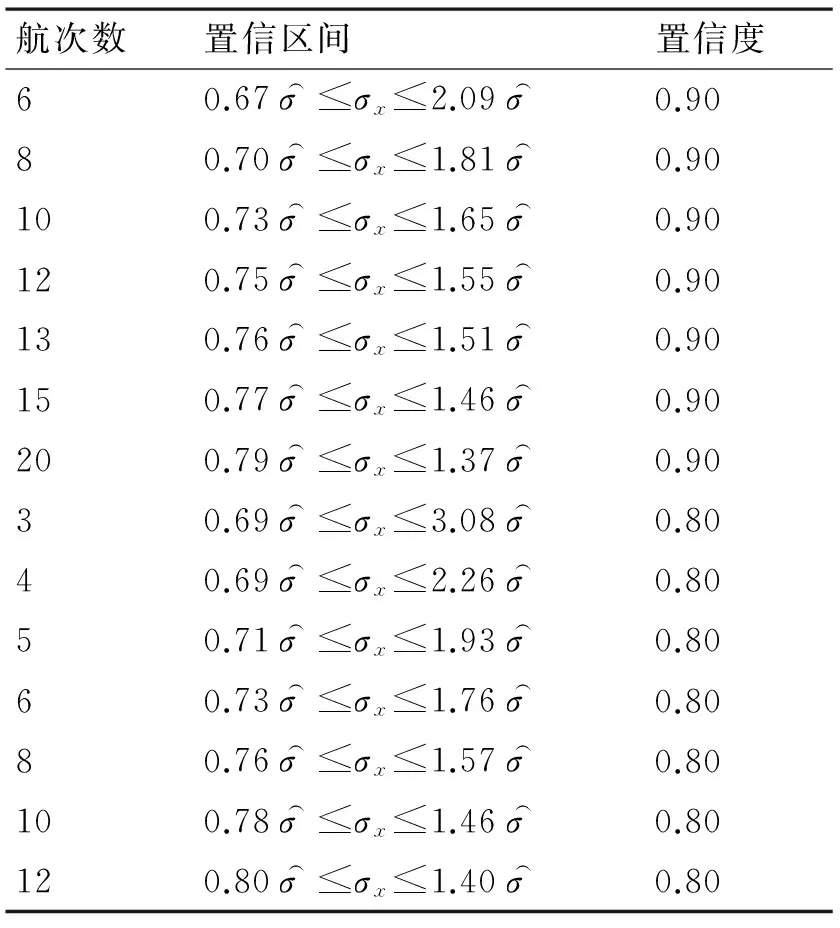
表1 試驗航次與置信區間關系表
5海上實施方案
獵雷ROV定位精度試驗海上實施方案的制定,主要依據定位指標要求和獵雷ROV作戰使用。獵雷ROV海上作戰使用時有兩種工作模式,即母艦區域定位作業和前置作業。母艦區域工作方式中,母艦錨泊,獵雷ROV在母艦錨泊區域內對水雷進行探測定位,必要時采用滅雷方法清除水雷。在前置工作模式中,獵雷ROV在前方引導母艦規避水雷航行。獵雷ROV定位精度指標為航程Xkm時相對誤差小于xm。在精度試驗中,獵雷ROV工作模式應為前置工作方式,海上實施的主要過程有初始對準、綜合校準、海上母船與獵雷ROV同步航行、GPS測量等過程。
5.1試驗保障條件
試驗海區的選取應結合獵雷ROV的實際使用需求和定位精度試驗需求,試驗海區可選底質平坦,最好為泥沙底或沙貝底,水深在Hm海域進行,海況滿足使用要求。
需要的測控設備為聲速梯度儀、水聲定位系統、流速剖面儀。網絡RTK GPS接收機。試驗艦船保障為:試驗母船一艘,能夠提供潛航體工作所需動力。警戒艇一艘,主要是處理意外和警戒使用。
5.2組合慣導初始對準與綜合校準
獵雷ROV組合慣導初始對準階段主要完成條件輸入初始條件,調整平臺到預定的坐標系,對陀進行陀螺進行測漂[10]。在試驗時,將潛航體布放入水,在水面漂浮Xmin,完成組合慣導的初始對準。
綜合校準,在導航工作中利用外部基準信息對慣導進行校準的過程。由于潛航體在水中機動,而捷聯式慣導又直接安裝在潛航體上,沒有物理平臺隔離,受環境影響大。導航過程中采用人工操控潛航體與母船水面同步航行模式,沿直線往返航行完成潛航體慣導綜合校準。慣導綜合校準航路圖見圖2。
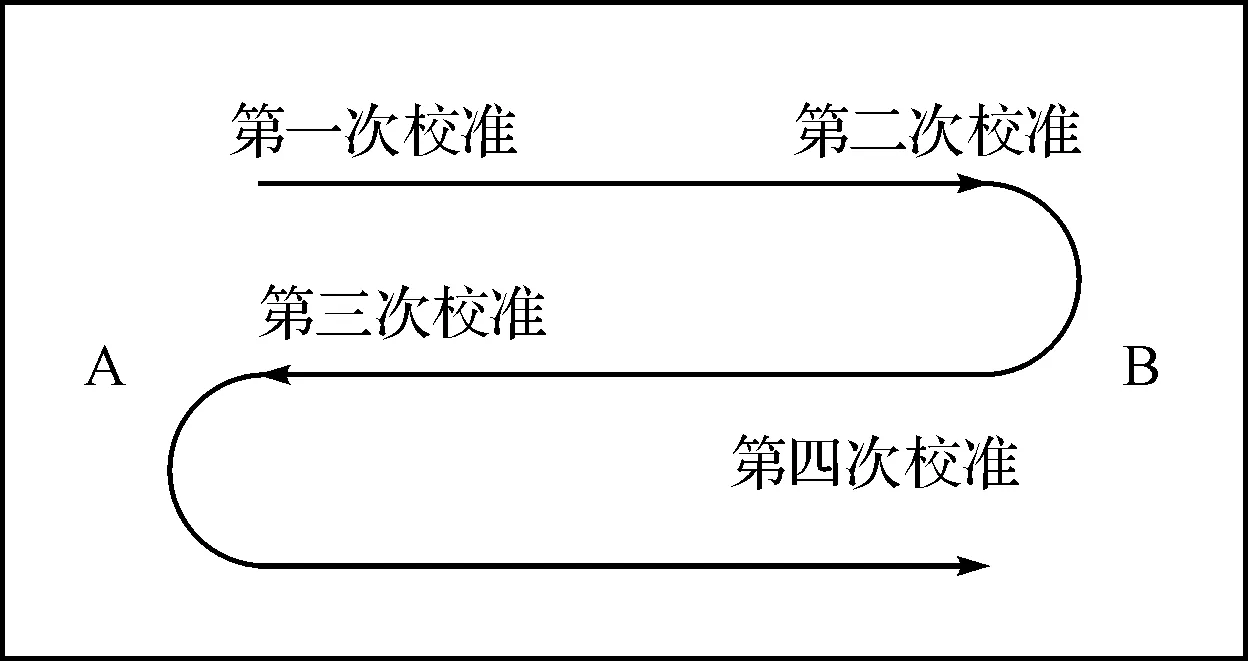
圖2 組合慣導綜合校準試驗航路圖
母船在A點布放潛航體,下達導航系統標定指令到潛航體,潛航體在水面漂浮15min,完成第一次校準。人工操控潛航體沿航線向B點方向以一定速度與母船進行水面同步航行,航程略大于Xkm后,開始第二次校準。校準完畢后調頭向A點方向航行略大于Xkm,開始第三次校準。校準完畢后調頭向B點方向航行略大于Xkm,進行第四次校準。第四次校準后完成綜合校準試驗。
5.3母船與獵雷ROV同步航行
在試驗海區設定起始點,規劃試驗航路。潛航體采用人工操控模式,母船保持與潛航體后方100m~200m、橫距5 m~30m進行同步航行,航速由慢到快逐步上升,同時在綜合顯控臺監控母船和獵雷ROV航行態勢。航程結束后,讀取慣導和GPS輸出位置信息。
6數據處理方法
在獵雷ROV定位精度試驗中,主要的數據處理及結果評定過程是:通過坐標轉換,來求解每航次定位誤差,然后在異常值檢驗的基礎上,得用χ2假設檢驗進行試驗結果評定。
6.1定位誤差解算
1) 將潛航體慣導輸出坐標和實際測得GPS坐標從大地坐標系轉換至地球空間直角坐標系
在大地標系中,任意地面點P的坐標為(B,L,H)。該坐標系的定義是:地球橢球的中心與地球的質心重合,橢球短軸與地球自轉軸重合,大地緯度B為過地面步的橢球法線與橢球赤道面的夾角,大地經度L為過地面步的橢球子午面與格林尼治平子午面之間的夾角,大地高H為地面點沿橢球法線至橢球面的距離[11]。
在地球空間直角坐標中,任意地面點P的坐標為(X,Y,Z),該坐標系的定義是:以地球質心為坐標原點O,其Z軸指向地球北極,X軸指向格林尼治平子午面與地球赤道的交點E,Y軸垂直于XOZ平面并構成右手坐標系。
大地坐標系至空間直角坐標系的轉換公式為

2) 求定位誤差在站心坐標系下的坐標(xi,yi,zi)
為解算方便,常取測點為原點建立坐標系,這種坐標系稱為站心坐標系。站心坐標定義如下:以測點的法線方向為Z軸,大地平行圈(東方向)與大地地平面的交線為Y軸,構成左手坐標系。空間直
則在站心地平直角坐標系下,求潛航體定位誤差為di。

6.2定位誤差的假設檢驗χ2檢驗法[12]
設di是來自試驗的樣本,要求的假設檢驗(顯著性水平為α):
H0:σ2=σ02=182H1:σ2>182
7結語
定位精度是獵雷ROV重要指標,對作戰效能起決定因素。定位精度試驗方法研究,對于完成該試驗項目考核,從而為系統設計定型試驗,指導部隊訓練和作戰使用,使獵雷ROV快速形成戰斗力具有重要意義。
參 考 文 獻
[1] 劉成勝,符敏.反水雷UUV發展技術[J].水雷戰與艦船防,2014,22(2):69-72.
[2] 姚興太.慣性導航系統定位精度與試驗路徑的關系[J].火炮發射與控制學報,2007(4):27-30.
[3] 董忠臣.潛航體定位精度考核方法探討[C]//反水雷兵器技術與裝備發展研討會論文集,北京:兵器工業出版社,2012:242-244.
[4] 李琳,丁春蕾,白偉.慣導系統最大定誤差的極值分析[J].天津航海,2005(4):45-47.
[5] 李壯,喬鋼,孫宗鑫.基于短基線的ROV實時高精度定位系統[J].高技術通訊,2013,23(12):1230-1235.
[6] 刁中凱,周開志,孫寶巖.基于差分GPS檢測火炮慣性導航定位精度[J].四川兵工學報,2009,30(12):1230-1235.
[7] 張天光,王秀萍.捷聯式慣性導航技術[M].北京:國防工業出版社,2010:263-264.
[8] 黃丁發,熊永良.GPS衛星導航定位技術與方法[M].北京:科學出版社,2009:201-203.
[9] 鄭梓禎,劉德耀.船用慣性導航系統海上試驗[M].北京:國防工業出版社,2006:105-106.
[10] 朱家海.慣性導航[M].北京:國防工業出版社,2008:174-175.
[11] 李明峰,馮寶紅,劉三枝.GPS定位技術及其應用[M].北京:國防工業出版社,2007:23-28.
[12] 盛驟,謝式千,潘承毅.概率論與數理統計[M].北京:高等教育出版社,1989:202-204.
收稿日期:2016年1月9日,修回日期:2016年2月29日
作者簡介:高峰,男,工程師,研究方向:試驗技術。
中圖分類號TJ61+7
DOI:10.3969/j.issn.1672-9730.2016.07.015
Mine-hunting ROV Location Precision Test Method
GAO Feng1LI Jianfei2
(1. Unit 96, No.91439 Troops of PLA, Dalian116041)(2.Navy Submarine Academy, Qingdao266042)
AbstractAccording to the operational theory of ROV integrated navigation system, a network positioning output as the true value is proposed, the tested product is compared to verify navigation and positioning accuracy. In the analysis of tactical and technical indicators, χ2 test method is given to design sample size, And according to operational use, offshore experiment implementation is designed. Finally, the coordinates conversion method is given for error solve, and the χ2 hypothesis testing is given for data processing and evaluation of results.
Key Wordsmine-hunting, location precision, test method
