基于二維Renyi熵與自適應人工魚群算法的紅外圖像分割*
2016-08-10 03:32:22李曉峰
艦船電子工程 2016年7期
李曉峰 方 龍
(裝甲兵學院 蚌埠 233050)
?
基于二維Renyi熵與自適應人工魚群算法的紅外圖像分割*
李曉峰方龍
(裝甲兵學院蚌埠233050)
摘要針對基于分解的二維renyi熵閾值分割算法中參數α的取值問題,根據均勻性測度評價指標,利用自適應人工魚群搜索方法,提出一種α參數自適應選取方法。實驗結果表明,本文所提出算法,針對不同紅外圖像均可以獲得理想的圖像分割效果,具有良好的通用性。同時還可以將算法計算復雜度由O(L6)降為O(L2)。
關鍵詞紅外圖像; 分割; Renyi灰度熵; 自適應人工魚群算法
Class NumberTP18
1引言
由于紅外系統成像波長較長,目前又受限于制作工藝,導致產生的紅外圖像具有對比度低、非均勻性大、分辨率差、噪聲大等缺陷。針對以上缺陷很多學者都進行了有針對性的研究:針對紅外圖像信噪比和對比度低的問題進行了圖像增強研究;針對圖像非均勻性問題進行了非均勻性校正研究;針對分辨率差進行了邊緣檢測研究。但以上方法對于復雜和多目標紅外圖像,存在著運算量大、處理效果不明顯等缺陷,而采用圖像分割可以較好地解決以上問題:它是將圖像中感興趣的目標提取出來的技術和過程,其作為圖像分析、目標識別和圖像理解的基礎,可簡化或改變圖像表達形式,使圖像更易被分析和理解。
本文針對紅外圖像對比度低、噪聲大等特性,鑒于二維Renyi熵閾值分割法良好的分割效果和人工魚群算法的全局搜索能力,提出一種基于自適應人工魚群算法與二維Renyi熵相結合的紅外圖像分割算法,利用人工魚群算法自適應地選取二維Renyi熵最佳閾值對應的參數α,并有效地將計算復雜度由O(L6)降至O(L2)。實驗結果表明,針對紅外圖像特性,該算法在不增加運算時間的基礎上,顯示了良好的分割效果和抗噪性。
2二維Renyi熵閾值選取與參數優劣評估
2.1二維Renyi熵閾值選取
設圖像具有L級灰度,則圖像像素灰度集合Gx={0,1,…,L-1},設窗口寬度為k,圖像像素在k×k鄰域內的平均灰度值也在L級內,圖像的鄰域平均灰度集合Gy={0,1,…,L-1}。對應一幅大小為M×N圖像,f(x,y)表示圖像中點(x,y)像素的灰度值,g(x,y)表示點(x,y)像素的鄰域平均灰度值,則g(x,y)定義如下:
下面以標準圖庫中Lena圖為例,如圖1所示。圖像所有像素中,目標區域和背景區域所占比例最大,且分布均勻。高峰主要出現在對角線附近,遠離對角線區域峰值很小。
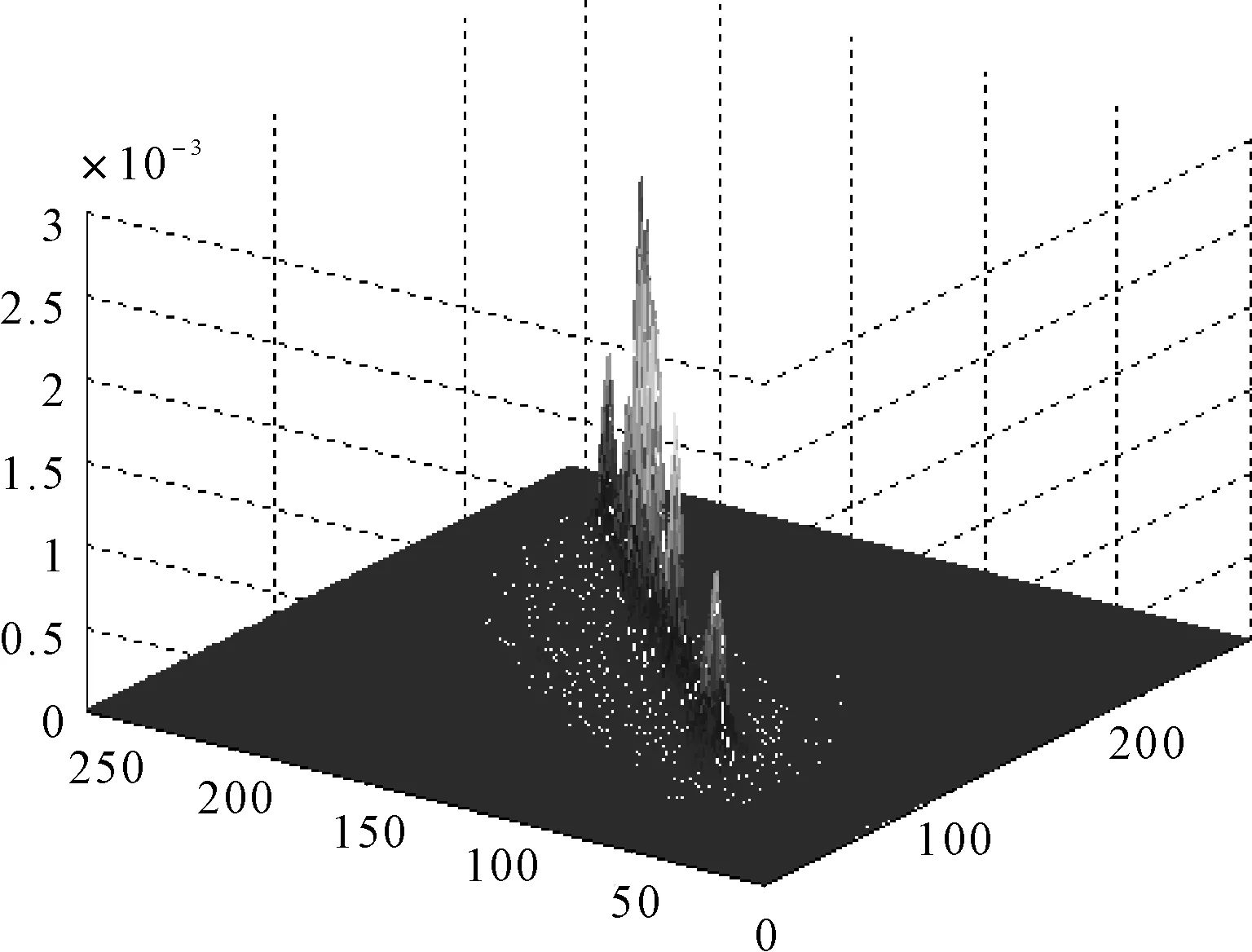
圖1 Lena二維直方圖
這時可設閾值元組(s,t)將二維直方圖分割為四個區域,其中1區對應目標域,2區對應背景域,3區和4區分別對應邊緣和噪聲。根據Sahoo等提出的二維Renyi熵定義[1],圖像的總體二維Renyi熵為
根據最大熵分割原理,當Hα(s,t)取得最大值的二元組(s,t)就是所求最佳閾值,這時最佳閾值向量(s*,t*)為
2.2均勻度測試參數評估
為了確定較優的參數值,本文采取基于圖像分割評價準則的方法來自適應地獲取較好的參數值,均勻性測度是用來評價分割方法性能的一個指標。對于一個區域,區域內的均勻性越好,其灰度分布越集中。假設在閾值(T,S)處對圖像進行閾值分割,其均勻性測度可以按以下公式[2]表示:
式中i=1,2,Ri表示分割后的第i個區域,F(x,y)表示圖像上坐標為(x,y)的像素點的灰度值,Ai表示區域Ri中的像素總個數,C是歸一化參數。
則參數α的最優解可以表示為
α*=argmax{UM(α)},α>0
3自適應的人工魚群算法
3.1基本人工魚群算法
人工魚群算法(Artificial Fish-Swarm Algorithm,AFSA)是一種模擬魚群來尋求全局最優的新思路。它研究模擬魚群的覓食、聚群和追尾等行為,通過每條人工魚的局部尋優達到全局尋優[3]。作為一種新型尋優策略,該算法具有魯棒性強、全局收斂性好、對初值敏感度小等優勢。人工魚群算法描述如下:
1) 覓食行為:指魚循食物多的方向游動的一種行為,設人工魚的當前狀態為Ya,在其視野范圍內隨機選擇一個狀態Yb,數學表達式為
Yb=Ya+Visual.Rand()
其中函數Rand()產生0到1之間的隨機數,Visual為視野范圍。當食物濃度Xa>Xb時,向該方向前進一步,數學表達式為
其中,Step為移動步長,如不滿足前進條件,在其視野范圍內再重新選擇狀態Yb,試探一定次數后,如仍不滿足前進條件,則隨機移動一步使得Ya到達一個新的狀態。
2) 聚群行為:指每條魚在游動過程中盡量向鄰近魚的中心移動以避免過分擁擠的一種尋優行為[4]。設人工魚的當前狀態為Ya,其鄰域的伙伴數目nf,如果nf/N<δ,(0<δ<1),表明伙伴中心有較多食物且不擁擠,則向中心位置Yc前進一步,這時Xa>Xc,數學表達式為

否則,執行其它行為。
3) 追尾行為:指魚向其可視范圍內的最優方向游動的一種行為。設人工魚當前狀態為Yi,探測其鄰域內狀態最優的鄰居Ymax,如果Xa>Xmax,并且Ymax的鄰域內伙伴數量nf滿足nf/N<δ,(0<δ<1),則表明Ymax附近有較多食物且不擁擠,則向Ymax方向前進一步,數學表達式為
否則,執行覓食行為。
3.2改進的人工魚群算法
通過對該算法深入分析后發現:雖然人工魚群算法對初值要求不高、全局收斂性好、簡單實現、在優化初期具有較快的收斂性等優點[5],但其最大移動步長對該算法的收斂速度和求解精度會產生關鍵影響,隨著步長的增大、移動速度的加快,算法初期收斂速度也隨之加快,但當個體逐漸靠近最優點時,該算法存在著尋優精度變低、后期收斂速度變慢且不易跳出局部極值等不足;當步長變小時,雖然求解精度提高,但算法收斂也變得極其緩慢。
為解決以上問題,提出自適應的人工魚群算法(Adaptive Artificial Fish-Swarm Algorithm,AAFSA),主要是增加守候行為和重生機制以提高全體的協調性;伴隨尋優從而動態地、自適應地調整魚群參數和求解域。通過以上策略提高全局搜索能力、收斂速度和全局極值求解精度的目標。
4基于自適應的人工魚群算法求解二維Renyi熵
為提高人工魚群算法的收斂速度和求解精度,提出一種自適應人工魚群算法AAFSA。具體作法:在算法初期,賦予每條人工魚較大的步長,加快尋優速度,隨著算法的進行,自適應地減小人工魚的步長,從而加大算法的收斂速度,本文引入迭代函數Stepk+1=r*Stepk來自適應地減小人工魚的步長。其中,k為當前迭代的代數,r∈(0,1)為衰減因子。
將自適應人工魚群算法和基于分割的二維Renyi熵圖像分割算法結合,自適應選取較優的參數值α。將圖像經二維Renyi熵分割后的UM均勻度測試值作為目標函數。
具體算法步驟:
1) 初始化人工魚群算法參數:初始化人工魚群條數N,人工魚群的初始位置,感知范圍Visual,初始步長Step,擁擠度因子&,衰減因子r,最大嘗試次數tryNumber,最大迭代次數T等參數[8]。
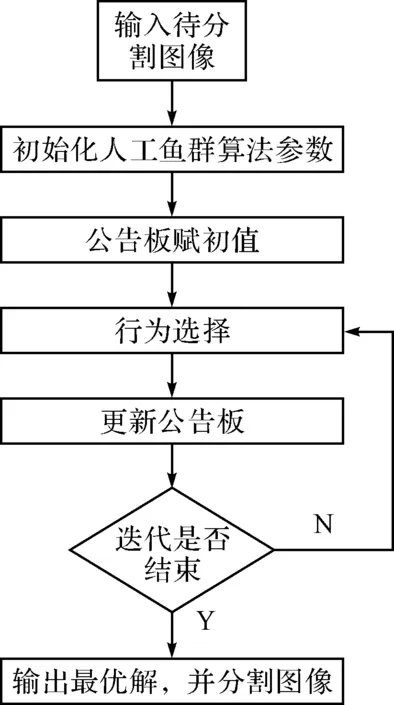
圖2 算法流程圖
2) 公告板賦初值:計算初始魚群各條人工魚的目標函數值并比較大小,取最優的人工魚狀態及其值賦給公告板。
3) 行為選擇:各個人工魚分別模擬追尾和聚群行為,通過比較目標函數值選擇最佳行為來執行,缺省行為為覓食行為。
4) 更新公告板:每條人工魚對自身的函數值和公告板的值進行比較,如優于公告板的值則取代之,否則公告板的值不變。
5) 判斷迭代是否結束[9]:判斷是否達到最大迭代次數T,達到則轉至6),否則重復步驟3)~5)。
6) 輸出最優解[10]。計算最優解α對應的圖像I最佳劃分閾值(s,t)max,并根據對應(s,t)max對圖像I進行分割,得到分割后圖像I′。
實驗結果與分析:
經過多次實驗,將人工魚群算法的參數設計如下:人工魚群條數N=20,人工魚感知范圍Visual=2.5,初始步長為Step=0.1, 衰減因子為r=0.95。擁擠度因子&=0.618,最大嘗試次數tryNumber=6。
5仿真實驗與結果分析
本文實驗在系統配置:CPU 主頻為i7-4770 3.4GHz,內存為4GB,Matlab 7.1下進行。為充分驗證算法的有效性和魯棒性,本文選取大量具有不同灰度分布的紅外圖像進行實驗。實驗包括:本文算法、基于分解的二維Renyi灰度熵[6](由文獻[7]知,Renyi熵參數α的經驗值為0.7,故實驗中取α=0.7)、二維Renyi熵自適應閾值分割[7]的圖像閾值分割在分割效果及時間上的比較。表1為閾值比較結果。
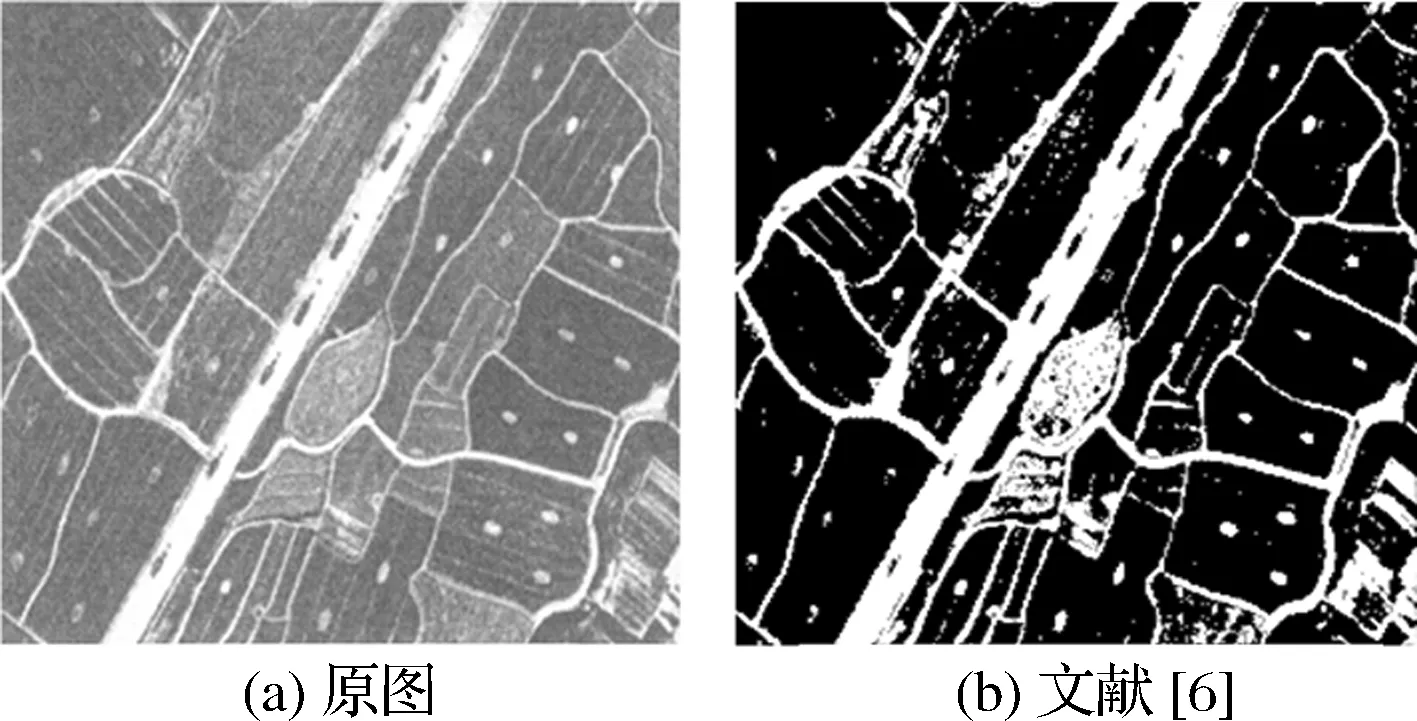
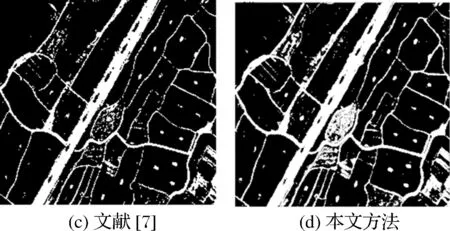
圖3 車隊公路行進圖的分割效果
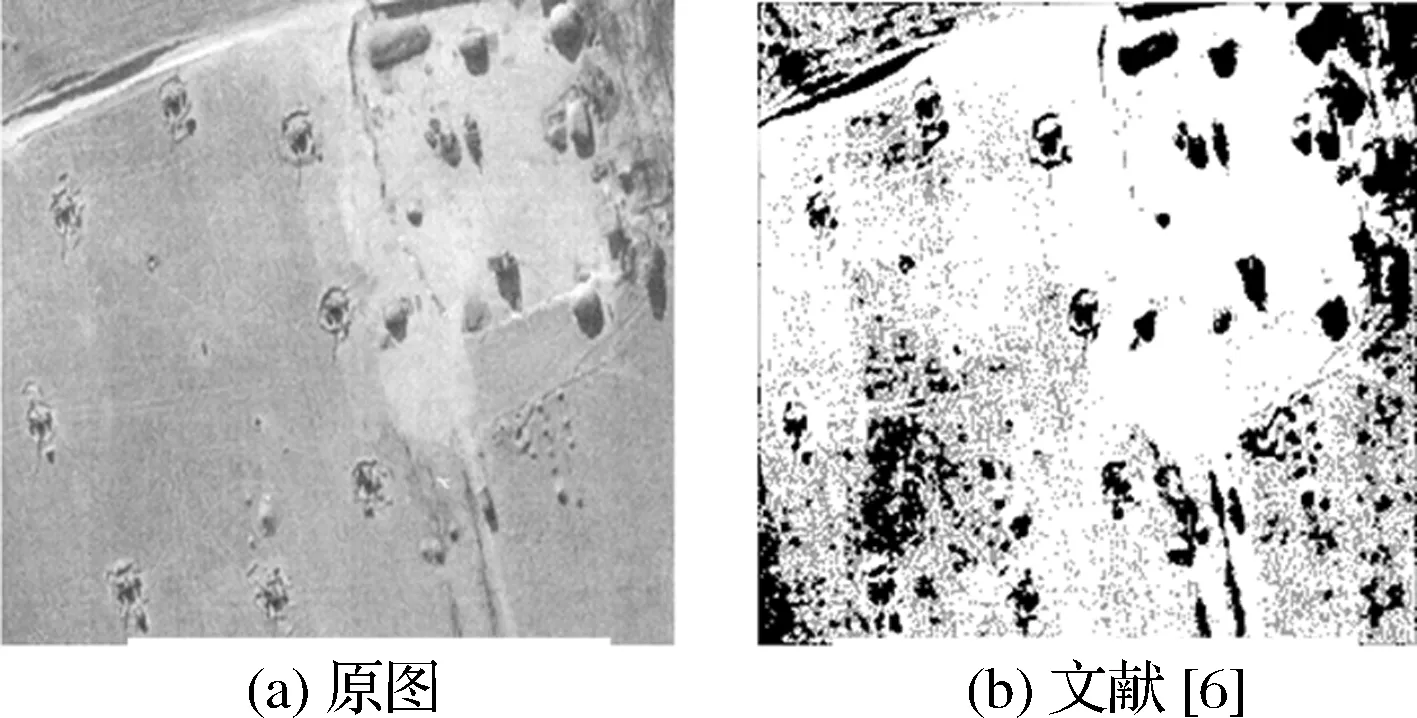
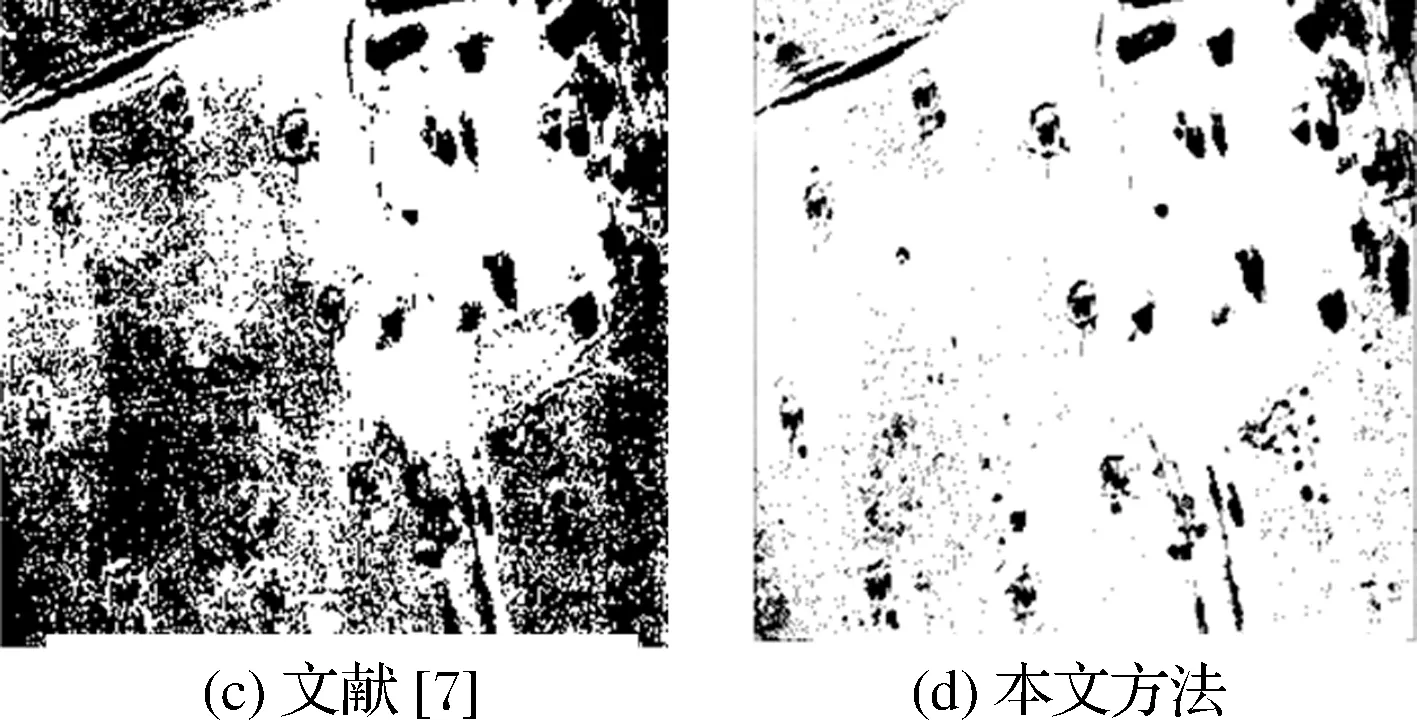
圖4 地面建筑分布圖的分割效果
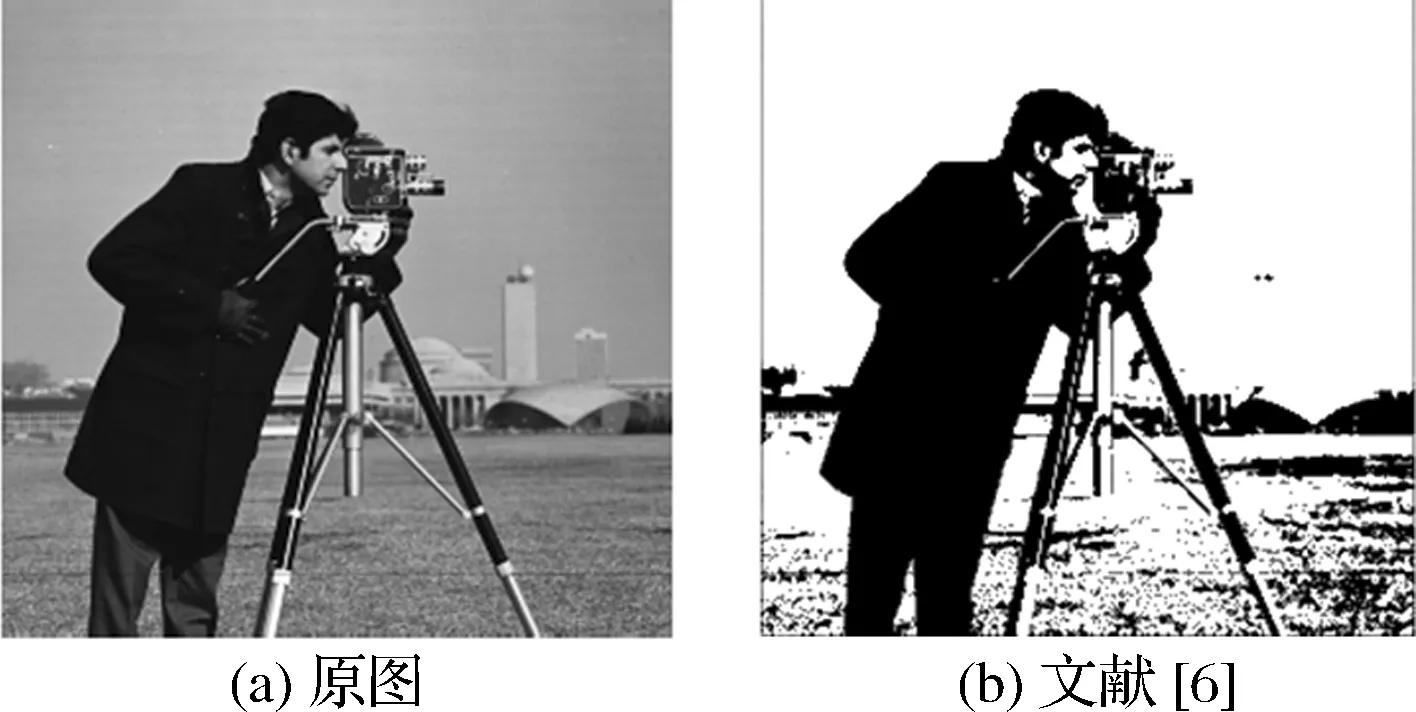
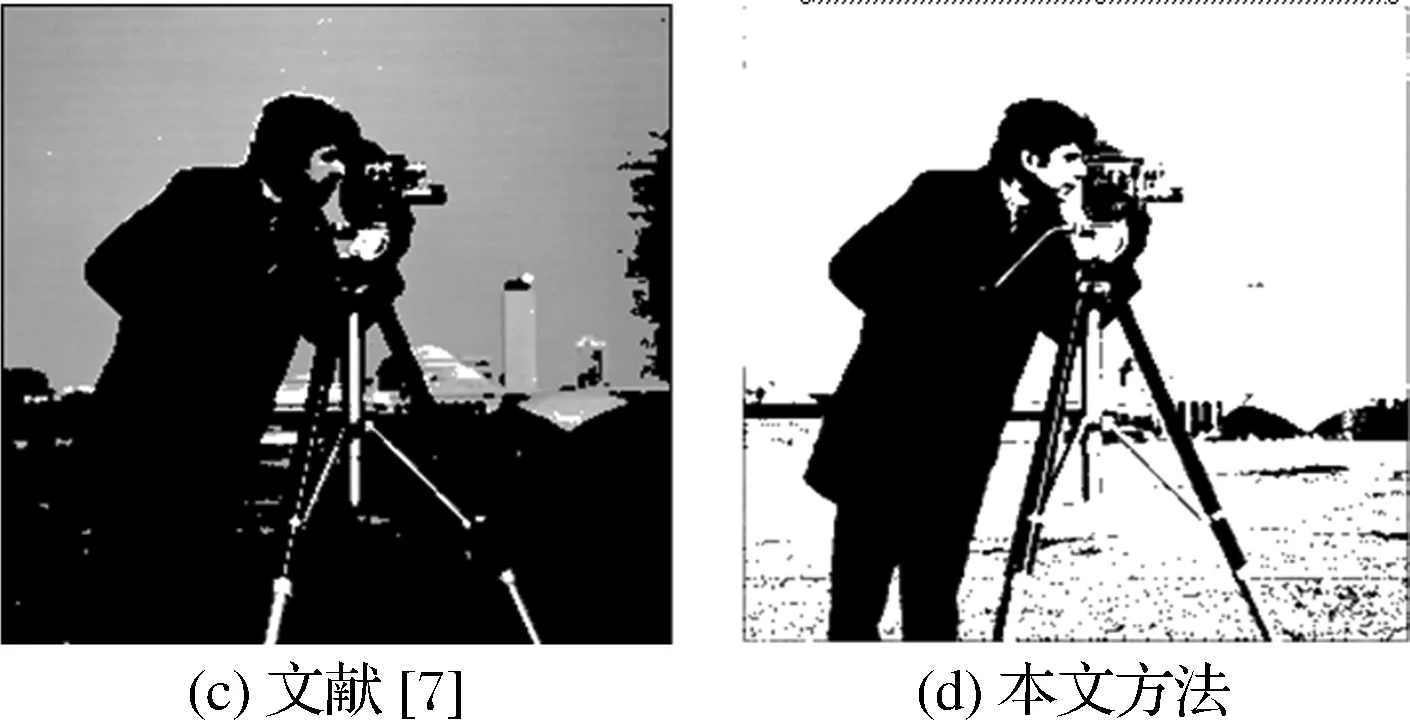
圖5 Camera圖的分割效果
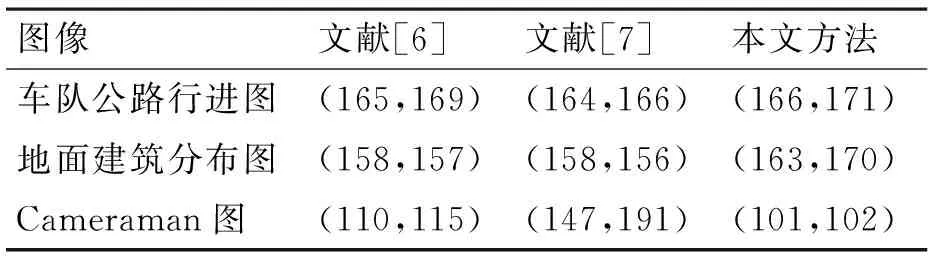
圖像文獻[6]文獻[7]本文方法車隊公路行進圖(165,169)(164,166)(166,171)地面建筑分布圖(158,157)(158,156)(163,170)Cameraman圖(110,115)(147,191)(101,102)
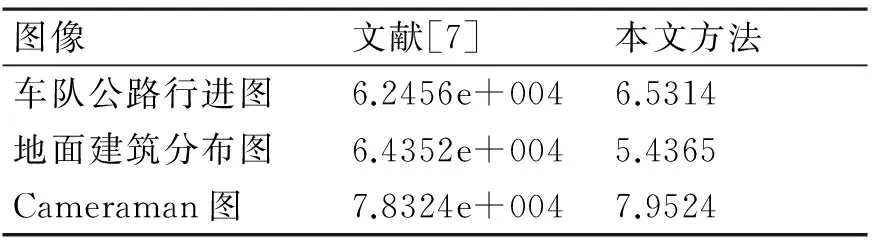
表2 各算法運行時間比較(單位:s)
6結語
由仿真實驗結果可以看出,不管是背景簡單還是相對復雜的紅外圖像,本文所提方法都可以取得較好的分割效果,分割后的圖像輪廓形狀清晰明確、內部分布均勻。由于參數α的取值對Renyi熵閾值分割效果至關重要[11],這時可由實驗結果看出,文獻[6]提出的基于分解的二維Renyi熵的分割方法,是把參數α取為0.7時對某些圖像有較好的風格效果,但對其它圖像還需要大量的實驗才能找到合適的參數值;文獻[7]提出的二維renyi熵中參數自適應選取的方法,雖然可以解決文獻[6]中α需提前選取的問題,但運算時間長,且從實驗結果看,分割效果不如文獻[6]的分割方法;本文算法不僅解決了文獻[6]中參數選擇的問題,而且相比文獻[7],運算時間大幅縮短,分割效果也優于以上兩種方法。
參 考 文 獻
[1] Prasann Sahoo, Gurdial Arora. A Thresholding Method Based on Two-dinmensional Renyi’s Entropy [J]. Pattern Recognition,2004,37:1149-1160.
[2] LUXBURG U V. A tutorial on spectral clustering [J]. Statistics and Computing,2007,17(4):395-416.
[3] 李曉磊.一種新型的智能優化方法—人工魚群算法[D].杭州:浙江大學,2003:20-53.
[4] NG A Y, JORDAN M I, WEISS Y. On spectral clustering: analysis and an algorithm[C]//Proceedings of the 14th Advances in Neural Information Processing Systems (NIPS 2001),Vancouver, British Columbia, Canada,2002:849-856.
[5] CRISTIANINI N, SHAWE-TAYLOR J, KANDOLA J. Spectral kernel methods for clustering[C]//Proceedings of the 13th Advances in Neural Information Processing Systems (NIPS 2001), Vancouver, British Columbia, Canada,2001:649-655.
[6] 龔劬,王菲菲.基于分解的二維Renyi灰度熵的圖像值分割[J].計算機工程與應用,2013,49(1):181-185.
[7] 雷博,范九倫.二維Renyi熵閾值分割方法中參數的自適應選取[J].計算機工程與應用,2010,46(22):16-19.
[8] 曲良東.基于自我調整高斯變異的人工魚群算法[J].計算機工程,2009,35(15):182-189.
[9] 范玉軍.改進的人工魚群算法[J].重慶師范大學學報:自然科學版,2007,24(3):23-26.
[10] 曲良東.混合變異算子的人工魚群算法[J].計算機工程與應用,2008,44(35):50-52.
[11] 段其昌.粒子群優化魚群算法仿真分析[J].控制與決策,2013,28(9):1436-1440.
收稿日期:2016年1月12日,修回日期:2016年2月22日
作者簡介:李曉峰,男,碩士,助教,研究方向:軍事情報學。方龍,男,碩士,副教授,研究方向:計算機工程。
中圖分類號TP18
DOI:10.3969/j.issn.1672-9730.2016.07.027
Infrared Image Segmentation Based on AAFSA and 2D-Renyi Entropy Threshold Selection
LI XiaofengFANG Long
(Armored Force Institute, Bengbu233050)
AbstractTo select optimal parameter a in decomposed 2D-renyi entropy image threshold segmentation method, a new adaptive method according to the uniformity measure which is an image segmentation evaluation criteria is proposed based on adaptive artificial fish-swarm algorithm. Experiment results show that the method can get desired segmentation result for each image. The algorithm is of universality and can also reduce the computational complexity from O(L6) to O(L2).
Key Wordsimage segmentation, decomposition, Renyi entropy, adaptive artificial fish-warm algorithm
