大下視場飛行模擬器視景系統的設計與實現
2016-08-10 08:00:44鄧晴鶯李國翬王寶奇姚建銓
系統仿真技術 2016年2期
鄧晴鶯, 李國翬, 王寶奇, 姚建銓
(1.天津大學 天津開發區奧金高新技術有限公司,天津 300072; 2.北京摩詰創新科技股份有限公司,北京 100029)
?
大下視場飛行模擬器視景系統的設計與實現
鄧晴鶯1,2,李國翬1,2,王寶奇1,2,姚建銓1,2
(1.天津大學 天津開發區奧金高新技術有限公司,天津300072; 2.北京摩詰創新科技股份有限公司,北京100029)
摘要:飛行模擬器視景系統是飛行模擬器的重要組成部分。針對飛行模擬器視景系統實時性要求高、視場角較大、場景覆蓋范圍較大、逼真度高等特點,基于某直升機飛行模擬器研制對下視場要求較大的特定需求,對大下視場模擬器視景系統的顯示系統、多通道網絡結構、視景仿真軟件以及視景數據庫進行了設計和實現,并對其中的關鍵技術如成像球幕加工技術、多通道同步和融合技術進行了深入研究。實際效果表明,該系統能夠實現大下視場視景系統研制任務的需求,達到了國內領先水平。
關鍵詞:視景系統; 飛行模擬; 球幕; 大下視場
1引言
隨著計算機性能大幅度提高,地景圖像技術、圖形繪制技術、投影等相關技術的發展,虛擬現實漸漸成為建模與仿真技術的關鍵[1]。
飛行模擬器作為虛擬現實應用之一,可以讓飛行員的訓練不受氣候、地形地域和環境的限制,可以針對飛行特情進行訓練,大大提高了訓練的安全性并降低了訓練費用。以我軍某型號的飛機為例,該機購置費2.5億元,飛行小時訓練費用為23萬元左右。飛行模擬器購置費5000萬元,每小時訓練飛行費用為3200元。只有實際飛行小時訓練費用的1/70。各國在飛行模擬器上的投入都是非常大,我國也逐步加大了對飛行模擬器的研制投入力度[2]。
飛行模擬器能夠把飛行員在空中操作真實飛機時所能看到的、聽到的、感覺到的飛機姿態、飛機運動、儀表指示、環境變化、周圍聲音以及駕駛力感等逼真地反映給飛行員,給飛行員提供視聽觸動的感覺[3]。視景系統是飛行模擬器的重要組成部分,給飛行員提供有效的視覺信息。它隨著計算機硬件、顯示技術、圖形圖像技術的發展而不斷發展,其中如光學成像技術、非線性失真校正技術、圖形加速繪制、特效模擬、同步技術、碰撞檢測等都是相關領域的研究熱點[4-8]。本文針對某直升機飛行模擬器的研制任務,結合其視景系統要求大下視場的特點,論述了大下視場飛行模擬器視景系統的設計和實現,并對其中相關關鍵技術進行了介紹。實踐證明該系統能滿足直升機飛行員訓練的要求,顯示效果逼真,該大下視場視景系統結構達到了國內領先水平。
2視景系統設計與實現
飛行模擬器視景系統主要用來模擬飛行仿真時座艙外的真實景象,為飛行員提供飛行視覺環境,結合運動系統的動感、操縱負荷的觸感以及音響系統的聽覺,從而營造一個逼真的虛擬飛行環境。
視景系統接收飛行仿真軟件傳來的位姿數據和教員臺的控制指令,實時更新視點位置,同時渲染出顯示的場景,與模擬器其他系統的接口關系如圖1所示。
針對直升機飛行模擬器的視景系統,除了能逼真模擬直升機姿態和真實自然環境、場景、燈光,有較低的系統響應延遲,對系統的下視場的要求,由原來的正投實像的40度提高到了55度甚至更大,這對系統的設計和實現提出了更高的要求。
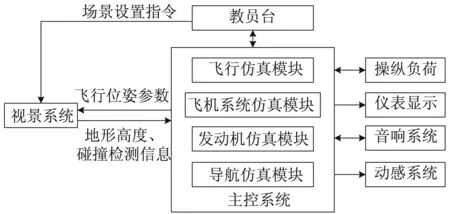
圖1 視景系統與模擬器各分系統接口關系圖Fig.1 Interface of visual system and other sub-systems in Simulator
3系統設計和實現
為了完成某直升機模擬器視景系統大下視場的研制要求,對其進行詳細設計和實現,下面分別針對顯示系統、多通道網絡結構、視景仿真軟件以及視景數據庫四個方面進行描述,其中重點對顯示系統設計進行描述。
3.1顯示系統
飛行模擬器主要有實像和虛像兩種不同的顯示方式,實像是由實際光線匯合在一起所成的影像。針對直升機對垂直視場要求較大的特點,考慮采用實像球幕顯示的方式。
對于飛行模擬器而言,如果多觀察點,則在眼點的定位方面,需要認真考慮。一般直升機模擬器為雙觀察點,為避免產生較大的失真,一般選擇兩飛行員中間為眼點。但由于直升機對大的下視場的要求,以及對于全運動模擬器降低重心高度的考慮,眼點的選擇通常位于球幕中心的下方,而飛行員眼位如與球心的位置較遠,則在觀察同一幅場景時,必然會產生較大的失真。在我們研制的飛行模擬器中,需要通過相應算法對其進行非線性失真的校正。具體分析如下:
假設坐標系為(x,y),原眼點的位置位于球心(0,0),眼點在地面的投影為G,移動后的新眼點O′在該坐標系中的坐標為(x0,y0),球心位置距地高度為H。假設球心與球幕上任意一點連線的與水平軸線夾角為α。
如圖2中所示,O′點與球幕水平相交于A點,O點與A點連線與地平線相交于G′,OA與水平軸夾角為
(1)
則從OA連線看到實際距離為
(2)
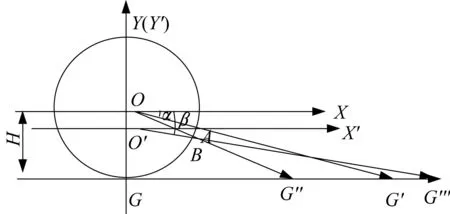
圖2 不同眼點的觀測示意圖Fig.2 Schematic drawing of observing from different eye-points
對于球幕上任意一點B,OB與地平線交于G″點,O′B與地平線交于G?。
二維坐標系xy中球截面,有表達式:x2+y2=R2,在x′y′坐標系中的表達式為
(3)
β為OB與水平軸的夾角,B點在xy坐標系中的坐標為(R·cosβ,R·sinβ),B點在x′y′坐標系中為(R·cosβ-x0,R·sinβ-y0)。
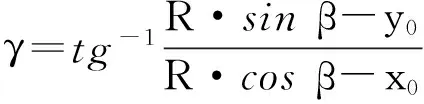
(4)
式中,忽略了O和O′垂直到地兩點之間的距離差別,則觀察的實際地速誤差百分比為
100%
(5)
球幕半徑為3米,x0=0米,Y0=0.45米,假設視景高度H為1 000米,則O′看出無窮遠情況下的初始角度,根據式(1),可計算出α為8.63度。當設計眼點偏離球心位置x0=0米,Y0=0.45米,假設球幕上的B的β角度為15度,可以計算得出從該點觀測的LGG″為3732,LGG?,為8 876,δ為138%。在不同的角度條件下可以求得其地速誤差。在飛行模擬器中,球心的主要觀測范圍為水平范圍,集中在視野前方,而對于設計眼點,因位于球心的下方,視野范圍主要集中在前下方。因此,為了保證設計眼點的視野范圍內的實際觀測效果,對球幕投影區域的下方,進行非線性縮放,從而對設計眼點,可得到滿意的效果。
圖像縮放指的是一幅圖像的重采樣。圖像放大和縮小的方法最典型的有幾何變換及離散數字圖像的連續表示兩種方法。
幾何變換是將目標圖像上的點(x,y)映射成源圖像上的點(u,v),將(x,y)處的顏色值取作(u,v)處的顏色值,當(u,v)不是格點時,可用(u,v)鄰近若干格點處的顏色值表示。離散數字圖像的連續表示法對原始的離散的數字圖像用連續函數進行刻劃,再根據圖像縮放的倍數要求對該連續表示的圖像進行重新采樣,得到新的離散的數字圖像。
線性縮放其變換表達式為
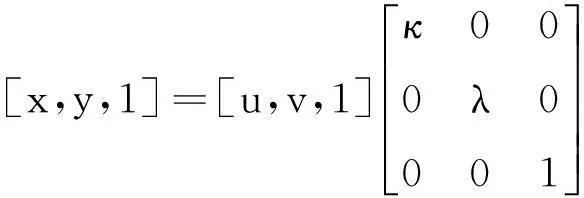
(6)
(7)
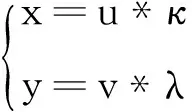
κ、λ為分別沿u、v坐標軸方向的縮放比例,
由于眼點低于球心,需要對相關通道的投影圖像進行非線性的縮放。采用離散數字圖像的連續表示法對圖像進行以圖像中心線為軸的對稱非線性壓縮,在水平方向上,保持原有的圖像比例,而在垂直方向上,對圖像進行非線性壓縮(壓縮函數見公式(7))。這里仍取x0=0米,Y0=0.45可得到較好的非線性壓縮效果。
3.1.1球幕結構
考慮到動感系統對系統重量和轉動慣量的限制,采用3米半徑實像球幕顯示系統,該系統由如下部分組成:成像球幕、球幕上蓋、球幕入口、投影儀平臺和支架,其外觀組成形式如圖3所示。
成像球幕的有效視場為水平180°(±90°),垂直:上18°,下60°。為保證有效視場的要求,將成像球幕設計成水平360°,并且在赤道位置按上18°,下60°時向心切下,以便于與上蓋及其它結構連接安裝。
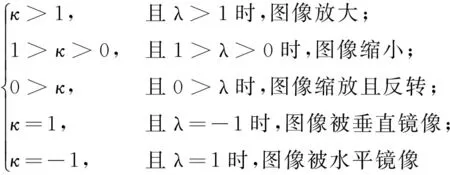
因成像球幕下視場大,導致成像球幕底部向內收縮,為加強成像球幕的穩定性,在每個球瓣的下方加一基座以增強球幕的穩定性,共八個,基座采用5mm厚的鐵板加工制作。由于下視增大基于安全考慮,對基座為0.8米和1.3米兩種情況下的幾種工作狀態的主體結構剛度、強度進行了校核。
根據模擬器的結構特點,結合有限元軟件的功能,在solidworkssimulasion中,采用二階實體四面體單元對幾何模型進行網格劃分。在有限元計算模型中,垂向為Y向,橫向為Z向,縱向為X向。計算時,在底部支撐板部位施加固定約束。
依據GJB2021-94《飛行器模擬器六自由度運動系統設計要求》,六自由度運動系統在工作狀態的直線、轉動加速將對模擬器主體結構施加慣性力。計算載荷主要為慣性載荷,如表1所示。
考慮一定的安全系數,選取2g直線加速度,120°/s2角加速度。
綜合考慮球體縱向與側向相同,計算升降、縱向、俯仰、橫滾、偏航5個計算工況0.8mm和1.3mm升降工況模擬器整體變形計算結果如圖4、圖5所示,其他工況的計算結果由篇幅限制不再贅述,各載荷工況最大位移值見表2。
表2 各載荷工況最大位移值Tab.2 Max.displacement under differentworking payloads

圖4 0.8m升降工況模擬器整體變形圖Fig.4 Integral deformation of simulator with 8 m support structure under vertical working payload
校核結果表明采用1.3m的基座能達到較好的強度。
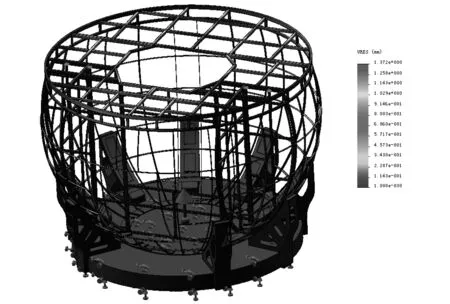
圖5 1.3m升降工況模擬器整體變形圖Fig.5 Integral deformation of Simulator with 1.5 m support structure under vertical working payload
對球幕頂蓋進行校核,如圖6所示。頂蓋最大變形量變形量0.4mm,可以滿足強度要求。

圖6 2G載荷下頂蓋變形圖Fig.6 Integral deformation of top cover under 2 g payload
3.1.2光路設計
為了達到系統視場的范圍的要求,需要多臺投影儀共同投影,且投影儀的投放距離要求相同。為了滿足系統對視場角、亮度、分辨率以及均勻性的指標要求,考慮球幕特點以及座艙對光路的遮擋,綜合設計球幕增益以及投影儀的擺放位置和投影儀性能指標,以使其最終能滿足系統總體指標要求。五臺投影器投影儀布局如圖7所示。
3.2多通道網絡結構
由于系統設計的水平視場角為180度,垂直視場角為80度,從保證投影圖像亮度和分辨率以及滿足場景運算實時性出發,將整個視景圖像分配到5個渲染通道來完成。
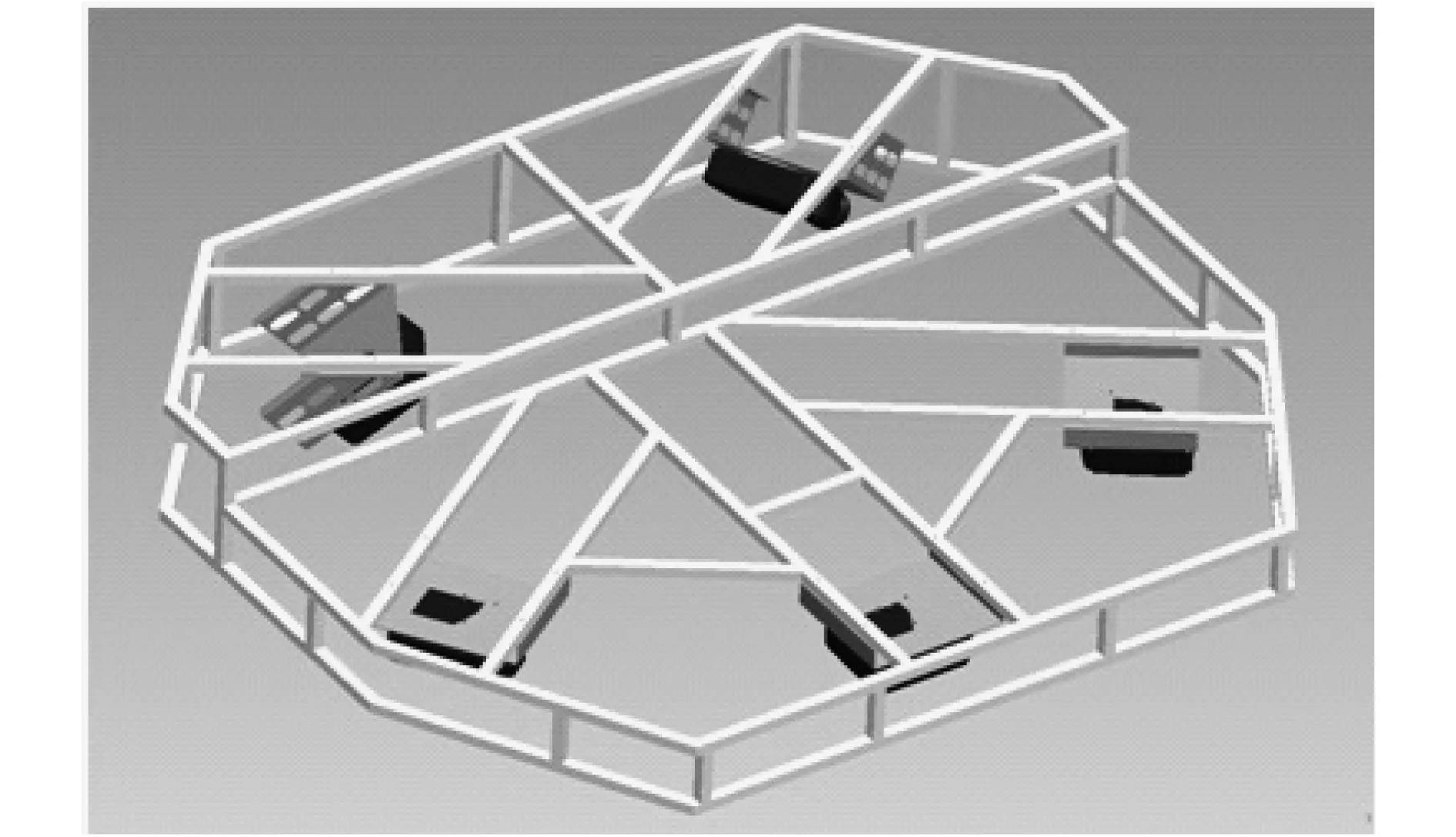
圖7 投影儀布局圖Fig.7 Layout of projectors
多通道視景系統網絡結構通常有內部廣播和管理節點調度兩種機制。結合總體設計要求,增加一臺作為視景控制節點,其他5臺作為渲染節點,該6臺計算機組成一個小的局域網的廣播機制。視景控制節點負責與模擬器其他分系統通信,并由其驅動和控制渲染節點,并實現渲染節點的畫面同步。圖形渲染計算機完成地形數據庫可視化渲染,亮度融合及邊緣變形等功能。其網絡結構如圖8所示。
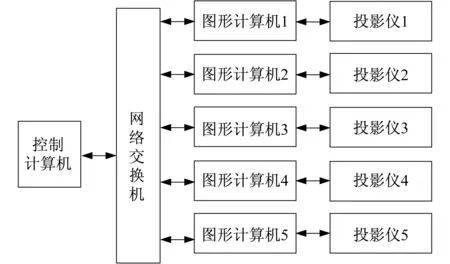
圖8 網絡結構圖Fig.8 Network structure diagram
考慮到系統的可靠性、可維護性以及高效性,系統計算機采用通用的貨架產品,并采用市場上成熟的高端圖形卡。
3.3視景仿真軟件
視景仿真軟件是視景系統的核心,主要實現指令的輸入和響應、場景驅動與渲染、地景庫的管理和動態調度、環境以及特效模擬、碰撞檢測等。
該系統軟件包含亮度融合及邊緣變形軟件、視景驅動軟件VegaPrime5.0等。基本實現參數如表3所示。

表3 視景計算機系統基本參數Tab.3 Parameters of imagine generator system
3.4視景數據庫
視景數據庫由專用的視景圖像建模工具creator和terravista制作。針對系統需求,先進行地形空間場景、三維目標和各種特殊效果的建模工作,然后將采集到的真實紋理照片和衛星照片進行數字化處理,最后輸入到計算機中進行紋理處理和紋理應用,形成具有真實紋理的全三維模型。然后在成像計算機上用VP實時圖像開發軟件進行場景組織,完成配置文件的生成,然后通過VegaPrime和OpenGL在VC環境下編程實現程序各模塊功能,完成視景仿真程序的開發。系統運行時,程序使用ACF配置文件,接收飛行仿真程序的信息和教員臺指令,實時構建視點相關場景,動態加載地景庫,提供系統所需的渲染圖像并輸出給顯示系統,從而實現系統的完整功能。其顯示效果如圖9所示。
圖9 視景顯示效果Fig.9 Airport in visual system
4關鍵技術
4.1成像球幕面形精度控制技術
此技術用于確保成像球幕面形符合高精度指標要求。由于實像顯示系統是投影設備直接將圖像投射到成像球幕上,若成像球幕的面形曲率不一致將會造成顯示圖象的扭曲變形。由于成像球幕是由模具糊制而成,要控制直徑達6m多,厚度達50mm的球帶的面形精度是非常困難的。為了解決這個問題,將每個單元成像球幕塊分解為內蒙皮(成像幕)、外蒙皮(外觀面)、中間夾層,三部分組成。外表面為4mm厚的玻璃鋼,內表面為6mm厚的玻璃鋼,中間使用4mm厚的帶鐵作為加強筋以500mm×500mm田字形排布,中空部分用紙蜂窩填充以便加強球幕強度。在貼敷玻璃鋼蜂窩前需先將玻璃鋼蜂窩做浸膠處理,待膠干玻璃鋼蜂窩結構固定后再貼敷在中間夾層田字筋骨中空區域。
內外蒙皮均使用模具制作而成,內外蒙皮從模具中取出到達到穩定狀態時,尺寸會發生收縮變化,其比值成為收縮率。為保證最終產品的精度,需將收縮率反向加到模具上,即將模具的型腔放大χ(1+收縮率)倍。這樣就可以減小產品因收縮而帶來的誤差。產品的材料、大小、形狀及加工環境對收縮率都有一定的影響。因為內外蒙皮采用的是復合材料所以其收縮率很難確
定,通過測量以前的實際生產中采用同樣配比的復合材料所生產出來的產品的實際尺寸,得出一個收縮率,以此作為參考收縮率。使用MOLDFLOW軟件模擬本次產品的成形過程,得出一個理論收縮率。通過對兩個產品的形狀、大小的對比,結合參考收縮率與理論收縮率最終得出一個較為可靠的實用收縮率的范圍。從而最大限度的減小內外蒙皮因收縮而帶來的誤差以確保其高精度要求。
4.2成像球幕噴涂光學涂料技術
實像顯示系統是通過投影設備直接將圖像投射到顯示幕上,其立體感和縱深感不強,為使成像球幕成像清晰且加大其立體感和縱深感,需在成像球幕上噴涂某種特殊的光學涂料。該涂料具有特定的增益,其配比較為關鍵。
4.3多通道同步技術
由于采用5個成像通道,多個通道畫面的同步顯得尤為重要,直接影響系統性能。本系統主要采用軟件來實現主從機之間的協調控制,從而保證幀同步。
渲染節點接收到控制節點的數據包,待數據渲染完成后,發送給控制節點渲染完成信息;控制節點在接到所有渲染節點回應信息后,才進行下一步工作,從而保證了幾個通道運行的同步。
4.4多通道融合軟件
當多通道投影到顯示介質時,多通道顯示拼接帶來通道間圖像重疊,必然會存在一個邊緣圖像融合問題。采用邊緣融合的技術,使得相鄰通道重疊部分亮度線性減弱,從而使得整幅畫面亮度一致。設計投影機位置時,優化了圖像的相互匹配位置;同時采用軟融合的方法,使得拼接區域平滑,提高圖像質量。融合軟件安裝于渲染計算機中,利用顯卡的渲染周期與屏幕刷新周期的時間間隙,進行自動幾何校正和自動生成融合區的計算,減少了硬件成本,做到0延時。
5結束語
本文介紹了某直升機飛行模擬器視景系統的設計和實現。研究了直升機模擬器視景系統大下視場要求的特點,對其顯示系統、多通道網絡結構、視景仿真軟件、視景數據庫等的設計進行了描述,對其中的關鍵技術進行了研究,并完成了產品的工程實現。該系統能充分滿足直升機模擬器對大下視場范圍要求,為飛行員產生身臨其境的交互式仿真環境,具有很高的逼真度和可信度,在飛行模擬器大下視場視景系統領域為國內領先水平。
參考文獻:
[1]李伯虎,柴旭東,朱文海,等.現代建模與仿真技術發展中的幾個焦點[J].系統仿真學報,2004,16(9):1871-1878.
LIBohu,CHAIXudong,ZHUWenhai,etal.Somefocusingpointsindevelopmentofmodernmodelingandsimulationtechnology[J].JournalofSystemSimulation,2004,16(9):1871-1878.
[2]王行仁.建模與仿真技術的若干問題探討[J].系統仿真學報,2004,16(9):1896-1897.
WANGXingren.Researchanddiscussionontechnologiesofmodelingandsimulation[J].JournalofSystemSimulation,2004,16(9):1896-1897.
[3]張立民,滕建輔.飛行模擬器視景仿真系統設計與關鍵技術[D].天津大學,2014.
ZHANGLimin,TENGJianfu.Designandimplementationofflightsimulatorvisualsimulationsystem[D].TianjinUnivoristy,2014.
[4]吳曉君,王昌金.基于Creator/Vega的戰場飛行視景系統的實時仿真[J].系統仿真學報,2005,17(9):2297-2300.
WUXiaojun,WANGChangjin.Realtimesimulationofbattlefieldflightscenesystembasedoncreator/vega[J].JournalofSystemSimulation(S1004-731X),2005,17(9):2297-2300.
[5]李京偉,張利萍.基于虛擬現實技術的飛行視景仿真[J].計算機工程與設計,2005,26(7):1935-1937.
LIJing-wei,ZHANGLi-ping.FlightscenesimulationbasedonVR[J].Computerengineeringanddesign,2005,26(7):1935-1937.
[6]龔少華,沈為群,宋子善.基于PC機的實時視景仿真系統的研究與實現[J].計算機工程與應用,2002,38(4):118-121.
GONGShaohua,SHENWeiqun,SONGZishan.TheresearchandimplementoftherealtimesystemofvisualsimulationbasingonPC[J].Computerengineeringandapplications,2002,38(4):118-121.
[7]謝廣輝,魏少寧.飛行模擬器視景系統發展現狀和趨勢[J].航天醫學與醫學工程,2003,16(3):223-226.
XIEGuanghui,WEIShaoning.Reviewofvisualdisplaysysteminflightsimulator[J].Spacemedicine&medicalengineering,2003,16(3):223-226.
[8]張燕燕,黃其濤,韓俊偉,等.飛行模擬器視景系統的設計與實現[J].系統仿真學報,2009,6:3662-3667.
ZHANGYanyan,HUANGQitao,HANJunwei,etal.Designandiplementationofvisualsimulationsysteminflightsimulator[J].JournalofSystemSimulation,2009,6:3662-3667.
鄧晴鶯女(1980-),湖南湘鄉人,博士研究生,主要研究領域為計算機系統結構、飛行模擬器設計。

李國翚男(1964-),天津人,教授,主要研究領域為計算機應用技術,生物醫學工程。
中圖分類號:T 391.9
文獻標識碼:A
基金項目:國家863項目(2014AA7052002)
Design and Implementation of a Large Down FOV Visual System in a Flight Simulator
DENG Qingyin1,2,LI Guohui1,2,WANG Baoqi1,2,YAO Jianquan1,2
(1.TianjingUniversity,TEDAOrKingHi-TechCO.LTD,Tianjin300072,China;2.BeijingMoregetCreativeTechnologyCO.LTD.,Beijing100029,China)
Abstract:The visual system is an important component of the flight simulator.Visual system of flight simulator requires high real-time ability,large field of view and realistic imaging effect.Based on requirement of a specific helicopter flight simulator,in which a large down FOV is needed.We designed its display system,multi-channel network,visual simulation software and scene database.Some key technology during the system implementation,including Dome processing,multi-channel communication synchronization and edge blending,was explored.The visual system used in the helicopter flight simulator achieves high-quality of visual effect and reachs the domestic leading level.
Key words:visual system; flight simulator; dome; large down FOV