GPS一機(jī)多天線技術(shù)及其在邊坡形變監(jiān)測(cè)中的應(yīng)用
2016-08-10 03:08:05劉得永
大科技 2016年28期
劉得永
(湖南省第一測(cè)繪院湖南衡陽421000)
GPS一機(jī)多天線技術(shù)及其在邊坡形變監(jiān)測(cè)中的應(yīng)用
劉得永
(湖南省第一測(cè)繪院湖南衡陽421000)
GPS測(cè)量是目前最具發(fā)展?jié)摿Φ囊环N形變監(jiān)測(cè)手段。但購(gòu)買接收機(jī)的費(fèi)用高。基于GPS技術(shù)的優(yōu)、缺點(diǎn),我們提出GPS一機(jī)多天線技術(shù)。它不僅具有GPS全部的優(yōu)點(diǎn),而且它克服了常規(guī)GPS費(fèi)用高的缺點(diǎn)。大量實(shí)際應(yīng)用表明,只要操作得當(dāng),解算合理,一機(jī)多天線的精度完全能達(dá)到常規(guī)GPS的精度。所以GPS一機(jī)多在形變監(jiān)測(cè)中的應(yīng)用前景非常廣闊。
全球定位系統(tǒng);一機(jī)多天線;邊坡形變;變形監(jiān)測(cè)
1 GPS一機(jī)多天線系統(tǒng)的組成
整個(gè)一機(jī)多天線系統(tǒng)是一個(gè)復(fù)雜的、功能強(qiáng)大的監(jiān)控管理系統(tǒng),它集視頻監(jiān)控、GPS形變監(jiān)測(cè)、遠(yuǎn)程數(shù)據(jù)傳輸、信息管理平臺(tái)于一體。從結(jié)構(gòu)上劃分,它由數(shù)據(jù)采集、信息傳輸、信息處理這三個(gè)主要部分組成。這三部分又可分為以下六個(gè)部分:
(1)天線陣;
(2)數(shù)據(jù)傳輸部分;
(3)多天線控制器;
(4)基準(zhǔn)站;
(5)數(shù)據(jù)處理中心;
(6)野外供電系統(tǒng)。
一機(jī)多天線變形監(jiān)測(cè)系統(tǒng)結(jié)構(gòu)示意圖。

圖1
2 GPS一機(jī)多天線的精度分析
2.1 影響GPS一機(jī)多天線精度的因素
影響GPS一機(jī)多天線精度主要包括GPS一機(jī)多天線與常規(guī)GPS定位相同的誤差源以及GPS一機(jī)多天線的附加誤差源。
與常規(guī)GPS定位相同的誤差源各種誤差按其來源大致可分為三種類型:
(1)與衛(wèi)星有關(guān)的誤差;
(2)信號(hào)傳播誤差;
(3)觀測(cè)誤差和接收設(shè)備誤差。
GPS一機(jī)多天線的附加誤差源包括以下兩種:
(1)信號(hào)衰減誤差:常規(guī)GPS的天線和接收機(jī)是連在一起的一個(gè)整體,而GPS一機(jī)多天線的天線和接收機(jī)是分開的,它們之間的距離有的多達(dá)10km。這么遠(yuǎn)的距離信號(hào)通過各種方式傳過來,在傳的過程中就會(huì)產(chǎn)生衰減。這種衰減會(huì)使信號(hào)的噪聲增大,進(jìn)而影響一機(jī)多天線的精度。
(2)不同時(shí)誤差:常規(guī)GPS測(cè)量可以每個(gè)點(diǎn)放一臺(tái)GPS接收機(jī),很容易實(shí)施同時(shí)觀測(cè)。我們知道現(xiàn)在的一機(jī)多天線的觀測(cè)方式是序列性連續(xù)觀測(cè),也就是說各觀測(cè)值不是同時(shí)觀測(cè)的,這就可能產(chǎn)生誤差。通常一個(gè)點(diǎn)的觀測(cè)(要保證較高精度的情況下)就需要30min,一個(gè)多天線子系統(tǒng)8個(gè)天線總共就須觀測(cè)4h。也就是說第一個(gè)觀測(cè)值和第八個(gè)觀測(cè)值可能至少相差4h左右。4h前的點(diǎn)位可能發(fā)生了變化,這樣就可能產(chǎn)生誤差。比如在洪峰來臨時(shí)大壩受到的壓力很大,幾分鐘之內(nèi)大壩的位移就可能達(dá)到10多厘米,4h提供一次數(shù)據(jù)遠(yuǎn)不能達(dá)到變形監(jiān)測(cè)的要求。由于變形監(jiān)測(cè)環(huán)境的復(fù)雜性和特殊性,實(shí)時(shí)觀測(cè)變得越來越重要,減少觀測(cè)時(shí)間,提高觀測(cè)效率是變形監(jiān)測(cè)發(fā)展的一種趨勢(shì)。
2.2 提高GPS一機(jī)多天線定位精度的方法
2.2.1 對(duì)常規(guī)誤差的處理
(1)衛(wèi)星鐘差:采用二項(xiàng)式模擬改正。
(2)衛(wèi)星星歷誤差:在多個(gè)測(cè)站上對(duì)同一衛(wèi)星進(jìn)行同步觀測(cè),然后求差。或直接采用相對(duì)定位。
(3)地球自轉(zhuǎn)影響:采用模型改正。
(4)相對(duì)論效應(yīng):統(tǒng)計(jì)模型改正。
(5)電離層折射:利用電離層模型改正,采用雙頻接收機(jī)減少電離層延遲,同步觀測(cè)求差。
(6)對(duì)流層折射:利用對(duì)流層模型改正,采用雙頻接收機(jī)減少電離層延遲,同步觀測(cè)求差。
(7)多路徑效應(yīng):安置天線時(shí)避開地面強(qiáng)反射物,采用防多路徑效應(yīng)天線。
(8)接收機(jī)方面的誤差:采用高精度的接收機(jī),定期對(duì)天線進(jìn)行校驗(yàn)。
2.2.2 對(duì)附加誤差的處理(1)信號(hào)衰弱誤差:采用信號(hào)放大器,用高質(zhì)量的傳輸方式。(2)不同時(shí)觀測(cè):對(duì)多天線控制器進(jìn)行改造。
3 常規(guī)GPS定位與GPS一機(jī)多天線定位精度的比較
為了對(duì)GPS一機(jī)多天線的精度有一個(gè)清楚的了解,我對(duì)二組數(shù)據(jù)分別進(jìn)行了解算:
數(shù)據(jù)1:采用雙頻Ashtech接收機(jī)對(duì)4個(gè)點(diǎn)進(jìn)行觀測(cè)所得的數(shù)據(jù);
數(shù)據(jù)2:采用一機(jī)多天線系統(tǒng)對(duì)其中4點(diǎn)的觀測(cè)所得的數(shù)據(jù)。
我分別對(duì)這兩種數(shù)據(jù)進(jìn)行基線解算的結(jié)果如下:
數(shù)據(jù)1解算的結(jié)果。
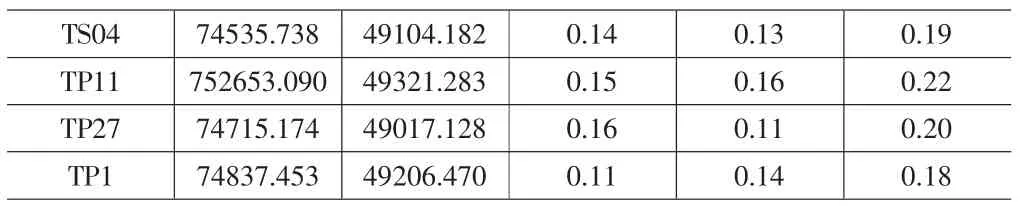
表1
數(shù)據(jù)2的解算結(jié)果。

表2
對(duì)比以上結(jié)果,可以看出常規(guī)GPS的精度為1~2個(gè)mm,一機(jī)多天線的精度為2~3個(gè)mm。精度均能滿足變形監(jiān)測(cè)的要求一機(jī)多天線與常規(guī)GPS的精度相比差不多。
4 應(yīng)用總結(jié)
(1)雙頻接收機(jī)的測(cè)量結(jié)果與單頻的相比,在觀測(cè)條件較好的測(cè)點(diǎn)上,兩種接收機(jī)的效果相當(dāng);但在觀測(cè)條件較差的測(cè)點(diǎn)上,雙頻比單頻的效果好。
(2)從觀測(cè)時(shí)間上看,在觀測(cè)時(shí)間達(dá)到45min時(shí),觀測(cè)精度基本能達(dá)到監(jiān)測(cè)要求,但觀測(cè)條件差時(shí),需延長(zhǎng)觀測(cè)時(shí)間才能取得達(dá)到精度要求的數(shù)據(jù)。
(3)采用GPS監(jiān)測(cè)網(wǎng),GPS觀測(cè)中誤差在3mm左右,但外符合精度差。這需要采用濾波算法。
采用一機(jī)多天線系統(tǒng),由于需要的高精度的GPS接收機(jī)的數(shù)量極大地減少,整個(gè)系統(tǒng)的造價(jià)隨之下降,但沒有影響系統(tǒng)的監(jiān)測(cè)精度。只要處理得當(dāng),解算合理,多天線系統(tǒng)測(cè)量結(jié)果完全可以與常規(guī)GPS測(cè)量結(jié)果的精度相當(dāng)。綜合考慮監(jiān)測(cè)系統(tǒng)的精度和成本,采用一機(jī)多天線技術(shù)的形變監(jiān)測(cè)系統(tǒng)擁有很好的應(yīng)用價(jià)值和廣闊的應(yīng)用前景。
[1]劉大杰,施一明,等.全球定位系統(tǒng)的原理與數(shù)據(jù)處理.
[2]徐紹銓,等.GPS在大壩和滑坡安全監(jiān)測(cè)中應(yīng)用的研究.水力發(fā)電,2003,29(1):61~64.
[3]何秀鳳,華錫生.“GPS一機(jī)多天線變形監(jiān)測(cè)系統(tǒng)”.水電自動(dòng)化與大壩監(jiān)測(cè),2002,26(3):34~37.
[4]何秀鳳,丁曉利.GPS一機(jī)多天線技術(shù)的研究及應(yīng)用研究報(bào)告.
P256
A
1004-7344(2016)28-0206-02
2016-8-13
劉得永(1985-),男,助理工程師,本科,主要從事測(cè)繪工程工作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00