改進最小二乘法雙目視覺位姿測量技術研究與測試
2016-08-13 21:41:56徐昌源全燕鳴郭清達
中國測試 2016年9期
徐昌源 全燕鳴 郭清達
摘 要:由于工件表面油污、光照等因素干擾導致工件圖像提取的特征點偏離實際位置,對工業機器人的抓取定位帶來較大誤差。該文以視覺引導工業機器人抓取氣缸蓋為應用對象,對雙目視覺高準確度位姿測量技術進行分析。首先探討特定條件下的雙目視覺定位引導機器人技術以及粗差點產生原因與解決方法情況;其次介紹視覺系統視覺坐標系和目標坐標系,然后在位姿測量數學模型的基礎上提出改進最小二乘法的準確計算方法,并搭建雙目視覺引導的工業機器人抓取氣缸蓋系統進行測試分析。測試表明:改進最小二乘法的位姿計算方法可實現雙目視覺對目標物的全自由度位姿測量,滿足工業機器人高準確度抓取操作。
關鍵詞:改進最小二乘法;雙目視覺;位姿測量;工業機器人;氣缸蓋抓取
文獻標志碼:A 文章編號:1674-5124(2016)09-0027-04
0 引 言
目前,特定條件下的工業機器人雙目視覺定位引導技術已經得到了一定研究與應用。這些研究與應用往往將作業目標簡化成一個點,然后使用雙目視覺對點進行定位;或者對于一些特定形狀的目標(比如長方體、圓柱體),利用目標的特征點和幾何特征獲得目標的空間坐標[1-2]。這些應用場合的操作對象比較理想,往往不需要末端執行器高精度定位,或者不需要機器人6個自由度操作[3]。
機器人末端執行器抓取指定工件時,需要工件多個不共線特征點來建立工件坐標系。工件圖像特征點的正確匹配,是求解工件坐標系相對世界坐標系位姿的關鍵,然而工件表面由于受油污、環境光等因素干擾導致圖像提取的特征點往往偏離實際位置[4-6]。在求解過程中,經典最小二乘法對粗差點影響時獲得求解矩陣偏離真實結果。目前去除粗差點解決方法是,在半自動化測量場合由人工剔除粗差點,或者采用RANSAC方法用部分點求解并用剩余點檢驗[7-8]。
本文采用剔除粗大誤差來提高最小二乘法求解精度的思想,在雙目視覺位姿計算的數學模型上,探討一種基于改進最小二乘法的雙目視覺位姿測量技術,并將其應用在工業機器人抓取氣缸蓋工業現場,使其測量精度和可靠性達到工業級應用的要求。
1 位姿計算的數學模型
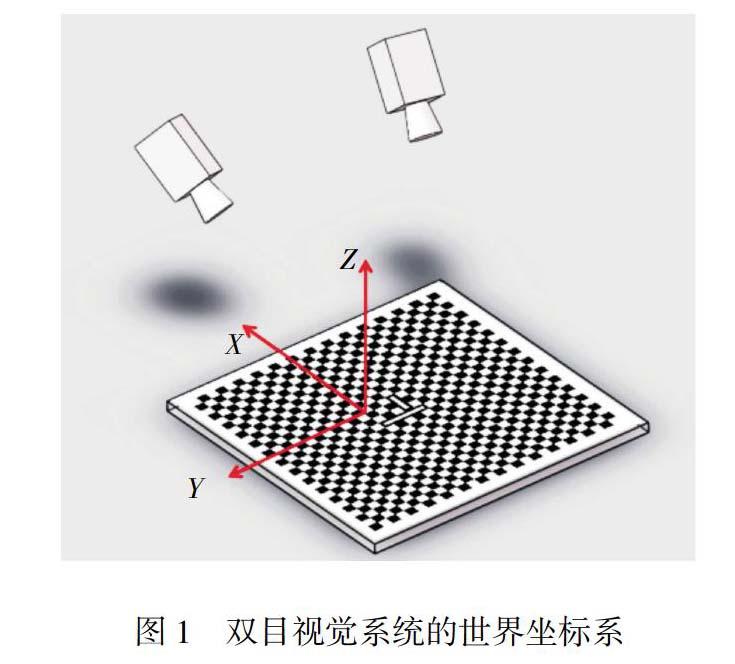
1.1 視覺系統的世界坐標系
在攝像機標定過程中,通過標定板上的特殊幾何形狀為攝像機指定一個世界坐標系,如圖1所示。兩臺攝像機首先在各自方位同步拍攝一次標定板的圖像,然后移動標定板獲得其不同方位的多組圖像用于標定各攝像機內外參數。其中根據第1組兩幅圖像所得到的外參數確定兩個攝像機的世界坐標系。兩個攝像機互相重合的世界坐標系作為雙目視覺系統的世界坐標系。
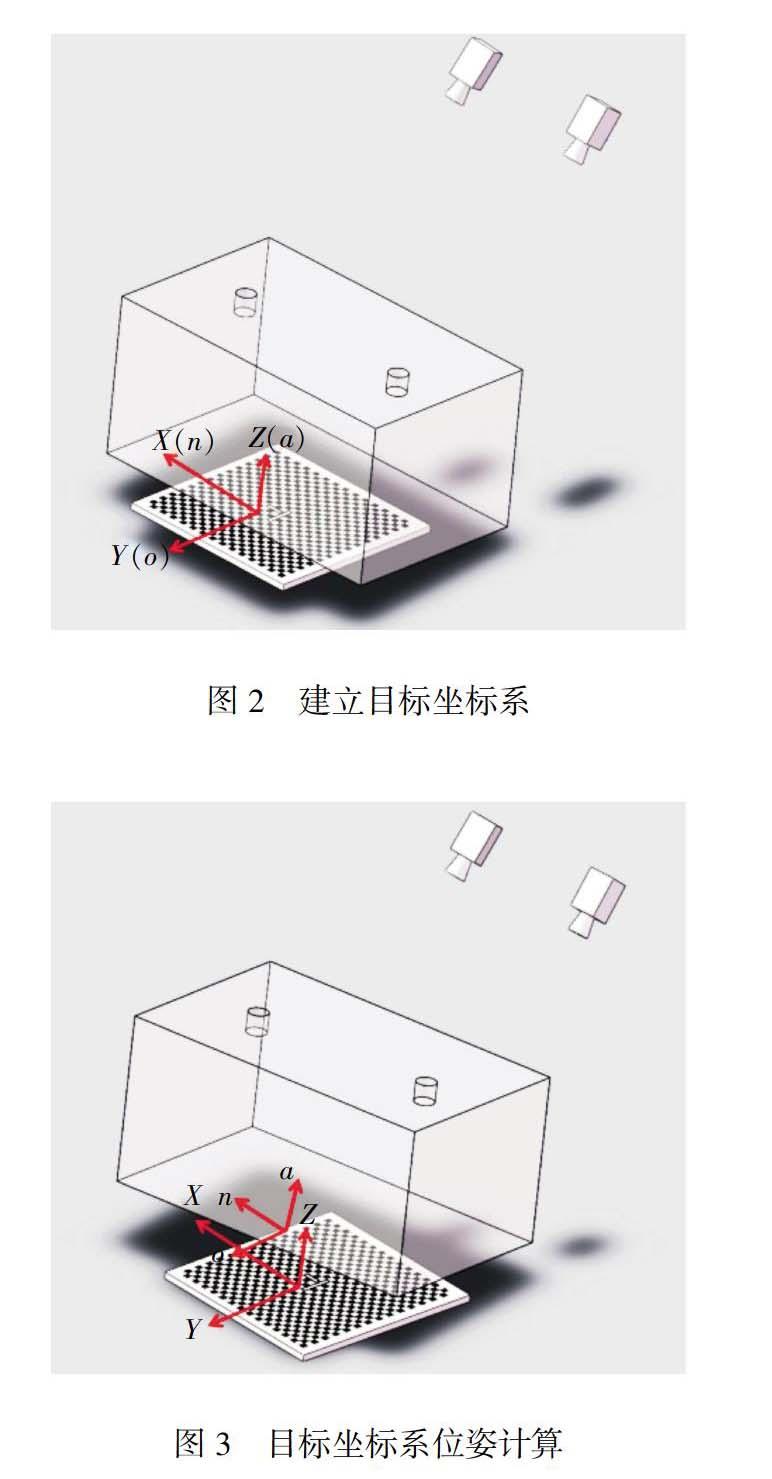
1.2 目標坐標系
目標坐標系是指1個固定在目標物上的坐標系,通過特征點提取來獲得目標上3個不共線的點在世界坐標系中的坐標,即可建立1個與雙目視覺系統世界坐標系XYZ完全重合的目標坐標系noa,如圖2所示。此時目標物各個特征點在目標坐標系中的坐標與其在世界坐標系中的坐標相同。
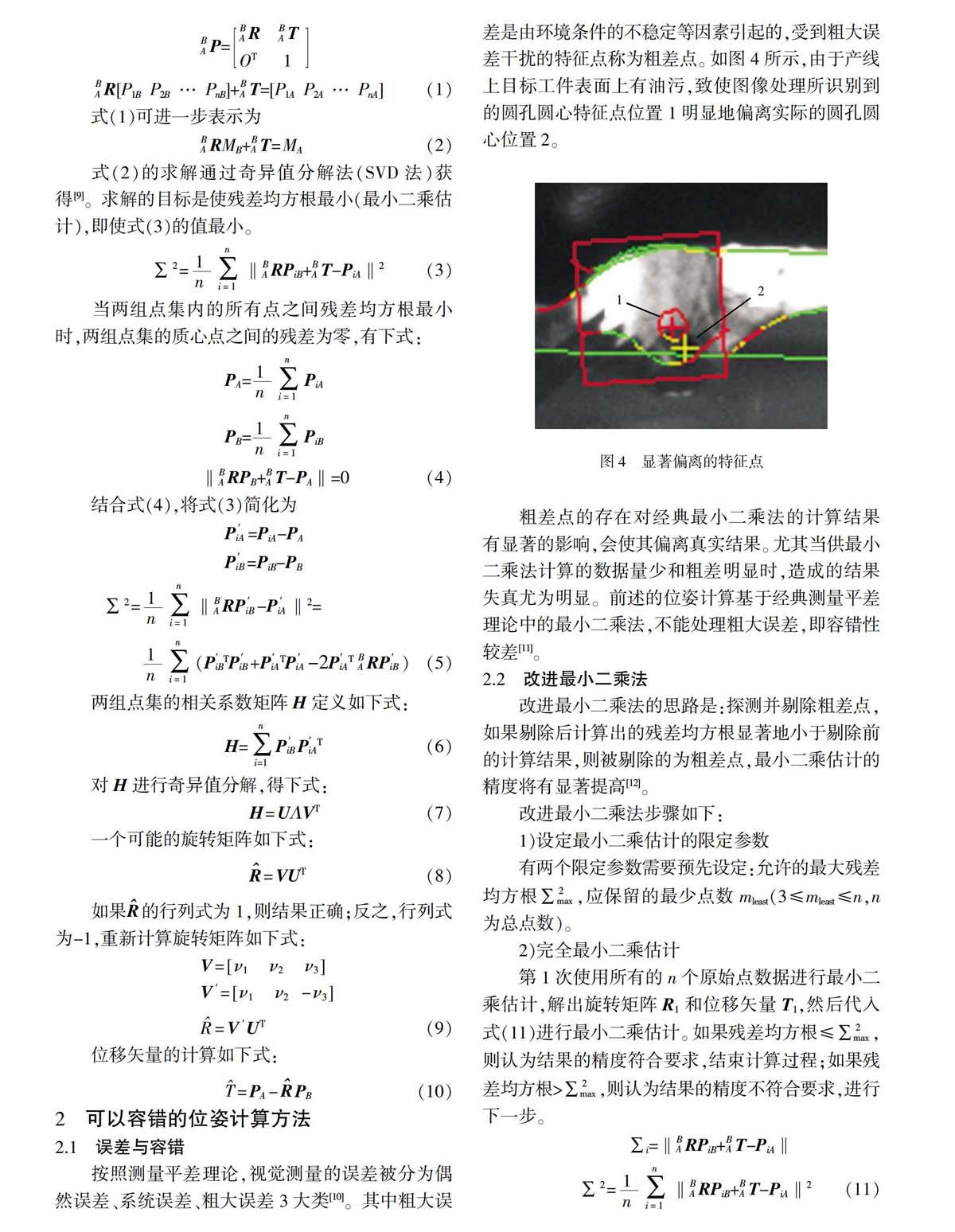
1.3 位姿計算
建立目標坐標系后,將圖2中目標物移置在雙目視覺系統中隨機的新位姿,目標坐標系noa與視覺系統視覺坐標系XYZ不再重合,如圖3所示。坐標系noa在坐標系XYZ中的方位將被用來表示目標物的位姿,求解目標物位姿就是計算這兩個坐標系之間的轉換關系。
設有坐標系A表示目標坐標系,坐標系B表示世界坐標系。點集{P1,P2,…,Pn}在坐標系A下的坐標值是{P1A,P2A,…,PnA},在坐標系B下的坐標值是{P1B,P2B,…,PnB}。BAP為目標坐標系在視覺系統的世界坐標系中的位姿,BAR為旋轉矩陣,BAT為位移向量,有:
4 結束語
本文采用雙目視覺位姿計算方法可以實現對工件上的目標坐標系全自由測量,應用改進最小二乘法可有效地抵抗粗大誤差干擾,剔除誤差點,得到精度較高的位姿測量結果,對目標工件圖像特征點有了相當大的容錯性。將獲得的位姿計算結果發送給工業機器人控制器,末端機構執行相應的位姿抓取氣缸蓋。測試表明,系統穩定可靠,可滿足工業級應用的準確度與要求。
參考文獻
[1] LI H, CHEN Y, CHANG T, et al. Binocular vision positioning for robot grasping[Z]. IEEE,2011:1522-1527.
[2] 王其軍. 六自由度機器人運動規劃及視覺定位技術的研究[D]. 哈爾濱:哈爾濱工業大學,2008.
[3] 林琳. 機器人雙目視覺定位技術研究[D]. 西安:西安電子科技大學,2009.
[4] 郭繼平,李阿蒙,于冀平,等. 雙目立體視覺動態角度測量方法[J]. 中國測試,2015,41(7):21-23.
[5] 鄧樺. 機械臂空間目標視覺抓取的研究[D]. 哈爾濱:哈爾濱工業大學,2013.
[6] 蘭太壽,李煒榮,劉向軍. 基于虛擬雙目視覺的電器電磁機構三維動態測試研究[J]. 電子測量與儀器學報,2014,
28(1):29-35.
[7] CORKE P. Robotics vision and control fundamental algorithms in matlab[M]. Berlin Heidelberg:Springer-Verlag,2011:402.
[8] FISCHLER M, BOLLES R. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. CACM,1981,24(6):381-395.
[9] ARUN K S, HUANG T S, BLOSTEIN S D. Least-squares fitting of two 3-D point sets[J]. Pattern Analysis and Machine Intelligence IEEE Transactions,1987(5):698-700.
[10] 武漢大學測繪學院. 誤差理論與測量平差基礎[M]. 武漢:武漢大學出版社,2003:213-217.
[11] 陳艷國. 回歸預測模型的穩健性分析(異常值處理)[J]. 工程地質計算機應用,2005(3):22-25.
[12] 王福源,葉英植. 線性回歸中粗差的特征值判別法及其應用[J]. 儀器儀表學報,1996(3):273-276.
[13] 顧立才. 基于雙目視覺的機器人柔性識別系統的研究[D].合肥:合肥工業大學,2012.
[14] 徐德,譚民,李原. 機器人視覺測量與控制[M]. 2版. 北京:國防工業出版社,2011:53-59.
(編輯:李妮)
