基于粒子濾波的RFID傳感器網絡中不確定數據清洗算法
2016-08-18 07:37:25南楠
黑龍江生態工程職業學院學報 2016年4期
南 楠
(三門峽職業技術學院,河南 三門峽 472000)
?
基于粒子濾波的RFID傳感器網絡中不確定數據清洗算法
南 楠
(三門峽職業技術學院,河南 三門峽 472000)
RFID技術利用互聯網將無線射頻識別系統與軟件連接可實現物品對象的跟蹤,具有可追溯性能力,廣泛地應用在供應鏈管理、資產跟蹤、假冒檢測等方面。然而,RFID閱讀器在大規模的數據識別網絡中由于環境和物理特性等所采集原始數據具有不確定性,嚴重影響其應用結果,為獲取更準確數據提出一種可追溯性框架處理不確定性數據,應用粒子濾波技術采集本地數據,有效解決原始數據漏讀、誤讀問題。實驗結果表明,該算法可有效提高在大規模網絡中采樣的精確度與效率。
RFID;物聯網;不確定數據;粒子濾波
0 引言
新一代產品信息網絡的建立如物聯網的形成,使RFID技術得到了廣泛的應用,如供應鏈管理、制造業、分銷物流、訪問控制和防偽等。基于互聯網有效的追蹤產品獲取相關信息,追溯其位置變化可以檢索歷史信息、存儲位置、時間、改變過程,提高對周圍事物的檢測能力,在無法到達現場的情況下為決策提供關鍵性支持。但RFID技術帶來利益的同時,仍然存在很多問題,由于環境因素和物理干預導致RFID讀取數據通常是不完整、不準確,甚至是誤讀[1]。
不確定性數據一般分為:多讀、漏讀和重復讀。通常處理的方法有兩種:一種是從數據庫中刪除不確定性數據,對剩余數據進行分析處理,但這種方法將導致分析結果的不準確與不完整;另一種方法是采用過濾器的方法,基本思想是使用一個滑動窗口預先設定閾值,讀數低于閾值讀數為假舍棄不用,但這種方法基本以實際經驗為基礎,缺乏理論基礎,不能得到廣泛應用[2]。
本文提出了一種基于采樣的粒子濾波技術來捕獲原始射頻識別數據,以概率分布為基礎降低識別對象的噪聲和等級,對對象識別數據建立節點獲取數據。通過實驗驗證所提出的技術原型具有較高的有效性。
1 問題描述
RFID系統的工作主要是將讀寫器采集數據存入后臺關系數據庫中,處理系統直接獲取數據進行處理分析。但是很多RFID在應用中都希望在海量的數據中發現異常數據給出提示,傳統的RFID系統只適合于處理已存在于數據庫的數據,不適合對流動的、實時數據進行查詢。在供應鏈管理、生產監控等領域,流動性數據的處理是目前最廣泛的應用,時間和事件發生位置將成為主要獲取目標,這就造成了數據的不確定性。
在整個RFID構成的網絡中,涉及到多個數據源,例如射頻識別器、傳感器和其他分布式數據源等,這些數據源產生大量的數據集包含與標記對象相關聯的運動信息。標簽和讀寫器之間的距離,或標簽和讀寫器天線間的方向都會使傳感器獲取信息不準確和不可靠[3]。這些都意味著對象的位置、時間、跟蹤信息成為推斷和估計原始射頻識別數據的關鍵基礎。基于上述情況總結出的射頻識別基本特性如下:
有序數據序列:原始的RFID讀取數據是以時間點進行記錄的,表現形式為r={EPC,ID,Ti},其中EPC為電子產品代碼,ID為讀寫器ID,Ti為標簽被檢測獲取數據的時間點。這些數據流記錄了檢測對象運動中所有信息的時間點。
不確定性數據:RFID觀察到的數據是非常雜亂的,受到環境和標簽與讀寫器距離的影響,RFID讀取準確率往往無法達到100%,其中有些重要的數據都是不精確和不可靠的。
漏讀數據:當被標記對象在一個讀寫器的檢測范圍內時,若讀寫器無法檢測到標記對象則會出現漏讀現象。在這種情況下,讀寫器誤認為標簽的對象是不存在的,導致射頻識別數據的丟失。
誤讀數據:當標記的對象超出了讀寫器的檢測范圍時,可能會讀取到一個不可識別的錯誤數據,這種被稱為假陽性讀數,對確定標簽的實際位置影響很大,導致最終分析結果錯誤。
2 可追溯性清洗框架
基于上述分析出的RFID數據不確定問題,本文提出一種采用構建可追溯性框架來處理不確定數據的方法。
2.1整體框架模型
對于RFID在供應鏈中的追蹤應用,本地應用程序管理主要包括數據處理、粒子濾波和數據模型。在應用程序中為了處理大量的原始射頻識別數據,采用一個以采樣為基礎的推理技術——粒子濾波技術,它可以捕捉到不確定的原始射頻識別數據,從動態和雜亂的原始數據中計算對象位置的概率分布情況。采樣計算和位置預測后,使用一種新的模式數據模型生成射頻識別的數據,一旦所有原始數據處理、建模和存儲完成,高層次的追蹤應用程序即可從數據庫中提取事件,實現數據查詢和挖掘。通過整個過程可以完成在可追溯網絡中對各個節點的數據采集,如圖1即可追溯網絡內部結構和功能圖。

2.2不確定數據概率模型
基于RFID技術的跟蹤產品應用中獲取的數據往往具有不確定和不可靠性,例如產品被盜、被偽造、損壞等。由于捕捉數據的不確定性,這里選取一個連續的隨機變量來描述數據,使用概率密度函數f(x)進行描述隨機變量。對于RFID讀寫去獲取的不確定對象定義為變量x,它的位置信息應該遵循設定的概率密度函數f(x)。
得出在所有射頻識別數據隨機變量x下的條件密度函數為[5]:
其中hn=∫Γ(x)f(x)dx是標準化常數。在這種情況下,位置變量x=(x1,……,xk)由邊緣驗后密度函數計算而得[6]:
通過貝葉斯規則可計算出位置變量x,但隨著無線射頻識別數據的增加,計算時間復雜度幾何倍數增長,這時可引入一個以采樣為基礎的粒子濾波技術降低時間復雜度。
2.3粒子濾波處理不確定數據
粒子濾波處理不確定數據的基本思想是使用一組有限的隨機樣本近似估算后驗概率密度,這些隨機樣本被稱為粒子。一個RFID的跟蹤應用程序主要任務有兩個:預測和更新。預測階段是構建候選粒子集,更新階段是構建合格的候選粒子集。粒子濾波技術可以有效地推斷出觀測數據的隱藏狀態(例如對象的位置)。
預測更新階段的具體算法描述如下:
輸出:預測對象樣本位置
步驟:
For?xi∈xdo
樣本xi位置+=運動軌跡;
樣本xi位置=擴散率*隨機數;
Endfor
測量概率p(樣本xi位置);
遞歸值計算;
For?xi∈xdo
xi測量概率p/=遞歸值;
計算xi的測量概率p;
Endfor
For?xi∈xdo
R=隨機數×給定系數;
如果第一次的p1>=r給G;
將G的值賦給xi;
Endfor
采樣階段算法描述如下:
If漏讀檢測對象數據
For?xi∈xdo
搜索最近讀數(xi);
將最近傳感器位置信息與xi比較并賦值;
將xi于讀寫器距離賦值給d;
Endfor
Else
For?xi∈xdo
計算(xi-讀寫器距離)并賦值給變量d;
Endfor
Endif
3 實驗及數據分析
實驗以評估捕捉到的不確定性原始射頻識別數據采樣為基礎,從動態和低噪聲的低級別射頻識別數據中產生符合馬爾科夫的概率分布模型。試驗中采用ST070-016全無源RFID芯片,該芯片工作范圍是860—960MHz,可適用于多種場合,系統主程序通過Java實現。實驗主要目的是檢驗基于粒子濾波方法的準確性,使跟蹤應用具有良好的精度。
實驗環境設計為在一個倉庫內,記錄和處理無線射頻識別數據流跟蹤貨物位置信息,初始原始射頻識別讀數不包括位置信息,針對漏讀、誤讀等現象通過采用粒子濾波方法推斷出真實數據信息。具體為模擬兩個不確定數據:位置不準確和數據不準確。模擬位置不準確使用一個隨機變量表示移動物體的運行軌跡,并在RFID數據接收上添加2個單位高斯白噪聲標準差;模擬數據不準確將隨機降低4%讀寫器的讀取數據。先將時鐘與數據接收系統時間同步,打開系統開始掃描對象標簽,實驗對象間隔均勻,設置每秒3個對象的掃描速度。將原始數據采集到系統中,進行系統分析、模型建立和查詢處理。整個階段所處理的數據以元組R={TR,DR,LRPR}形式存儲在一張表中。通過Java編寫的應用程序處理所有數據反饋結果。
實驗中輸入5組數據,每組100個數據記錄,設定漏讀率不同,每組數據運行5次取平均數,測試漏讀數據對位置準確性的影響,最終實驗結果如圖2所示。
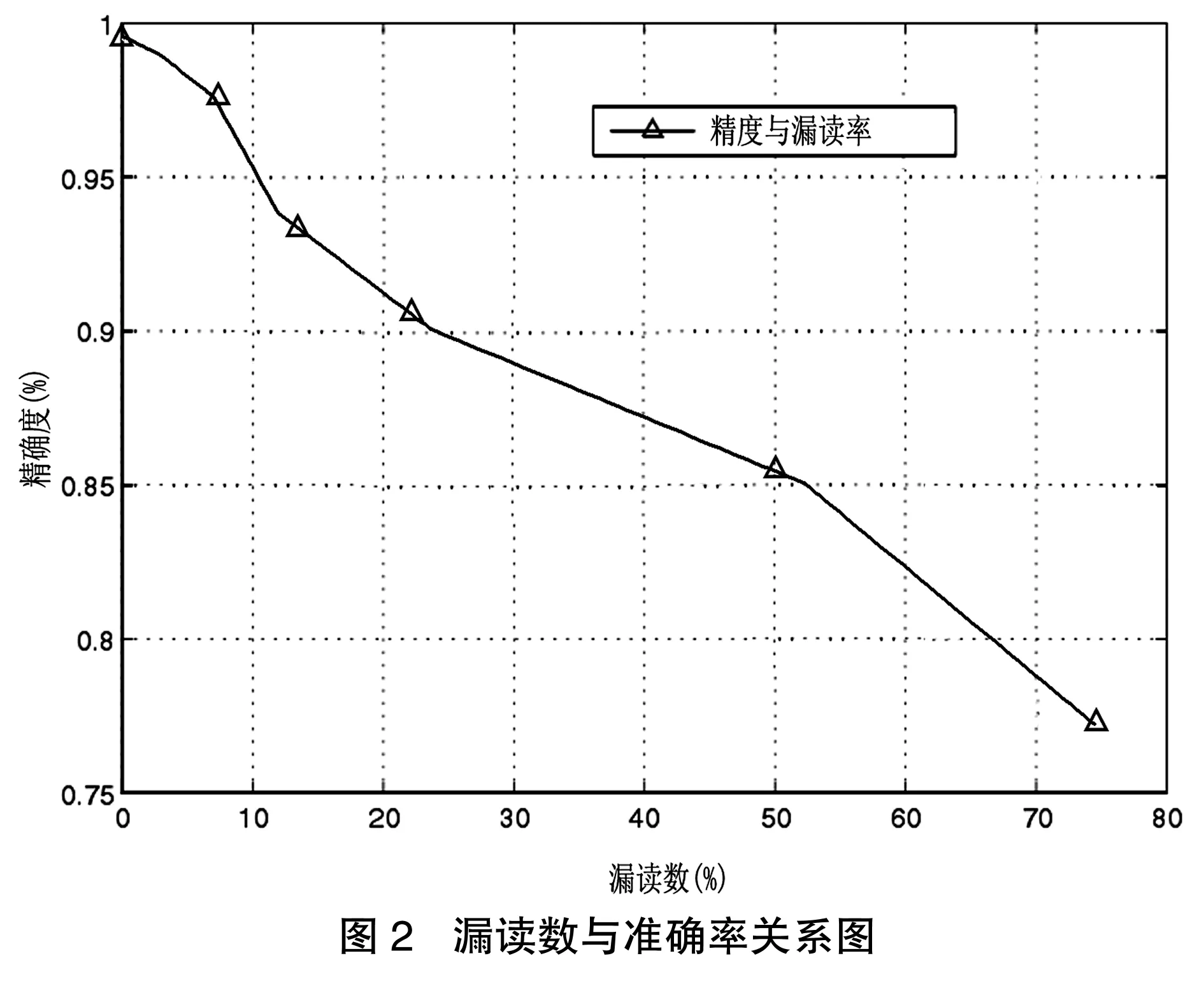
圖2中的實驗結果顯示,隨著漏讀數的增加位置精確度逐漸下降。當漏讀數目為0時,精確度接近100%;當70%的數據漏讀時,位置估測的精確度也能達到75%左右。這表明本文中所提出算法具有良好的預測效果。
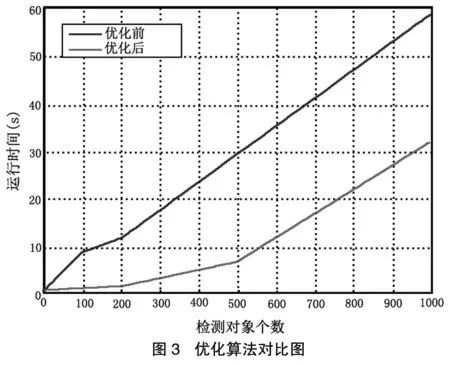
實驗過程中,還測試了優化算法對運行時間的影響,圖3給出的結果即為優化算法與傳統算法運行時間的對比。從圖中可以看出,當檢測對象數達到200以后,優化算法的運行時間明顯減緩,優化的算法可以減少接近總運行時間的一半,與未優化的算法相比,表現出卓越的時效性。
4 結語
在射頻識別跟蹤網絡對象中管理不確定數據仍然是目前拓寬其應用的挑戰。本文中,主要針對物聯網中獲取對象動態信息,特別是處理獲取不確定的射頻識別數據進行研究, 設計一個可追溯性清洗框架, 改進現有清洗射頻識別原始數據技術,提出一個基于采樣的推理技術即粒子濾波捕獲原始射頻識別不確定數據,計算從動態和雜亂底層RFID數據映射對象真實信息的概率分布,將RFID技術在無線傳感器網絡中的可追溯應用變得更加準確和高效。
[1]王霞,玄麗娟,夏秀峰.基于時序關系的RFID不確定數據清洗算法[J].遼寧大學學報,2012,39(2):174—177.
[2]王同磊,張進東.基于粒子濾波的RFID數據清洗方法研究[J].電子技術與軟件工程,2014,(4).
[3]夏秀峰,玄麗娟,李曉明.分流機制下的RFID不確定數據清洗策略[J].計算機科學,2011,38(10A):22—24.
[4]崔紅娟.基于粒子濾波的RFID事件概率計算方法研究[D].沈陽:遼寧大學,2012:58—79.
[5]王萬良,顧熙仁,趙燕偉.一種基于動態標簽的RFID不確定性數據清洗算法[J].計算機科學,2014,41(6A):383—386.
[6]王妍,宋寶燕,付菡,等.引入卡爾曼濾波的RFID數據清洗方法[J].小型微型計算機系統,2011,32(9):1 794—1 799.
[7]谷峪,于戈,李曉靜,等.基于動態概率路徑事件模型的RFID數據填補算法[J].軟件學報,2010,21(3):438—451.
責任編輯:柴造坡
10.3969/j.issn.1674-6341.2016.04.014
2016-03-30
南楠(1981—),女,河南洛陽人,碩士,講師。研究方向:計算機應用、自動化控制。
TP311
A
1674-6341(2016)04-0030-03
