基于模糊RBF網(wǎng)絡(luò)的自適應(yīng)變結(jié)構(gòu)制導(dǎo)律設(shè)計(jì)
2016-08-30 07:14:04周德云楊振張堃
飛行力學(xué) 2016年4期
關(guān)鍵詞:結(jié)構(gòu)
周德云, 楊振, 張堃
(西北工業(yè)大學(xué) 電子信息學(xué)院, 陜西 西安 710129)
?
基于模糊RBF網(wǎng)絡(luò)的自適應(yīng)變結(jié)構(gòu)制導(dǎo)律設(shè)計(jì)
周德云, 楊振, 張堃
(西北工業(yè)大學(xué) 電子信息學(xué)院, 陜西 西安 710129)
針對(duì)空中高速、大機(jī)動(dòng)目標(biāo)的攔截問(wèn)題,傳統(tǒng)的滑模變結(jié)構(gòu)制導(dǎo)律雖然對(duì)外界干擾和參數(shù)攝動(dòng)具有較好的魯棒性,但是存在視線角速率抖振及參數(shù)不易確定等缺點(diǎn)。對(duì)此,在變結(jié)構(gòu)控制理論的基礎(chǔ)上,提出了三維自適應(yīng)變結(jié)構(gòu)制導(dǎo)律,將目標(biāo)加速度視為外界干擾,設(shè)計(jì)了一種快速趨近律,并利用模糊RBF網(wǎng)絡(luò)的高效自學(xué)習(xí)能力對(duì)變結(jié)構(gòu)項(xiàng)的增益進(jìn)行了在線自適應(yīng)調(diào)節(jié)。仿真結(jié)果表明,該制導(dǎo)律能夠有效削弱系統(tǒng)抖振,提高制導(dǎo)精度,并對(duì)攔截大機(jī)動(dòng)目標(biāo)具有很強(qiáng)的自適應(yīng)性。
導(dǎo)彈攔截; 三維制導(dǎo)律; 變結(jié)構(gòu); 模糊RBF網(wǎng)絡(luò); 自適應(yīng)
0 引言
制導(dǎo)律是影響導(dǎo)彈綜合性能最重要、最直接的因素之一,而且決定著制導(dǎo)體制的采用。經(jīng)典的比例導(dǎo)引律用于攔截機(jī)動(dòng)目標(biāo)時(shí),在彈道末端存在著視線不穩(wěn)定和需用過(guò)載大等缺陷,導(dǎo)致脫靶量大。基于現(xiàn)代控制理論的最優(yōu)制導(dǎo)律形式復(fù)雜,而且對(duì)信息誤差相當(dāng)敏感,當(dāng)信息測(cè)量或估計(jì)誤差較大時(shí),其制導(dǎo)性能反而低于比例導(dǎo)引律[1]。
變結(jié)構(gòu)控制系統(tǒng)因具有很好的抗干擾和抗參數(shù)攝動(dòng)的特性,在制導(dǎo)律設(shè)計(jì)中得到了廣泛應(yīng)用[2-6],但不足之處是,會(huì)存在視線角速率抖振的問(wèn)題。如何削弱抖振一直是研究的熱點(diǎn)。用飽和函數(shù)或高增益連續(xù)函數(shù)替代滑模制導(dǎo)律中的符號(hào)函數(shù)[4]是常用的去抖振方法,但對(duì)于加速度未知的機(jī)動(dòng)目標(biāo),仍存在函數(shù)參數(shù)難以確定的問(wèn)題。文獻(xiàn)[5]根據(jù)制導(dǎo)系統(tǒng)的離散方程,設(shè)計(jì)了一種能顯著降低系統(tǒng)抖振的離散滑模制導(dǎo)律,并探討了該系統(tǒng)的收斂性,但該方法需要對(duì)目標(biāo)機(jī)動(dòng)和飛行時(shí)間進(jìn)行估計(jì),從而使制導(dǎo)律對(duì)目標(biāo)機(jī)動(dòng)較為敏感。利用觀測(cè)器來(lái)估計(jì)外界干擾及不確定性并加以補(bǔ)償,也是一種解決抖振問(wèn)題的有效方法。文獻(xiàn)[6]即采用了帶有濾波器的擴(kuò)張觀測(cè)器來(lái)估計(jì)所需制導(dǎo)信息的方法來(lái)設(shè)計(jì)制導(dǎo)律。通過(guò)調(diào)節(jié)趨近律參數(shù)亦可以有效地削弱變結(jié)構(gòu)控制系統(tǒng)的抖振[7-9];文獻(xiàn)[7-8]研究了基于模糊控制技術(shù)確定增益變化的滑模制導(dǎo)律,但該方法同樣需要對(duì)目標(biāo)機(jī)動(dòng)進(jìn)行預(yù)估,并且模糊器的設(shè)計(jì)也給制導(dǎo)律的設(shè)計(jì)增加了難度。
本文以零化視線角速率為出發(fā)點(diǎn),將目標(biāo)加速度視為外界干擾,同時(shí)為改善系統(tǒng)狀態(tài)趨近過(guò)程的動(dòng)態(tài)品質(zhì),對(duì)傳統(tǒng)趨近律[9]進(jìn)行了改進(jìn),并引入了模糊RBF網(wǎng)絡(luò),在線自適應(yīng)調(diào)節(jié)變結(jié)構(gòu)項(xiàng)的增益。仿真結(jié)果表明,該制導(dǎo)律能夠有效地削弱系統(tǒng)的抖振,提高制導(dǎo)精度,并且對(duì)目標(biāo)機(jī)動(dòng)具有很好的自適應(yīng)性。
1 三維空間攔截模型
首先建立三維空間的攔截模型,如圖1所示。圖1中:M和VM為導(dǎo)彈及其速度;T和VT為目標(biāo)及其速度;Oxgygzg為慣性坐標(biāo)系;Oxhyhzh為彈道坐標(biāo)系;Oxlylzl為視線坐標(biāo)系;θM,φM,θT,φT分別為導(dǎo)彈和目標(biāo)的彈道傾角和彈道偏角;qε,qβ分別為視線傾角和視線偏角。
1.1導(dǎo)彈的數(shù)學(xué)模型
導(dǎo)彈的運(yùn)動(dòng)由質(zhì)心運(yùn)動(dòng)和繞質(zhì)心的轉(zhuǎn)動(dòng)所組成。本文在研究攔截問(wèn)題時(shí),將導(dǎo)彈視為可操縱的質(zhì)點(diǎn),不考慮其繞質(zhì)心的轉(zhuǎn)動(dòng),從而得到簡(jiǎn)化后的導(dǎo)彈三自由度運(yùn)動(dòng)模型[10]為:
(1)
式中:gxh,gyh,gzh為重力加速度在導(dǎo)彈彈道系上的分量;amxh,amyh,amzh為導(dǎo)彈機(jī)動(dòng)加速度在彈道坐標(biāo)系上的分量;xM,yM,zM為導(dǎo)彈在地面坐標(biāo)系中的位置。目標(biāo)的數(shù)學(xué)模型與導(dǎo)彈類似,這里不再贅述。
1.2彈目相對(duì)運(yùn)動(dòng)數(shù)學(xué)模型
選取某一時(shí)間段Δt起始時(shí)刻的視線坐標(biāo)系作為制導(dǎo)過(guò)程中的參考系,在Δt內(nèi)此參考系隨彈體平動(dòng)。這樣,彈目相對(duì)運(yùn)動(dòng)可解耦到視線坐標(biāo)系上的縱向通道和側(cè)向通道內(nèi)[1]。
(2)
(3)
式中:amyl(t),amzl(t),atyl(t),atzl(t)分別為導(dǎo)彈和目標(biāo)機(jī)動(dòng)加速度在Oyl和Ozl上的分量。
2 改進(jìn)的三維變結(jié)構(gòu)制導(dǎo)律
(4)
下面采用趨近律來(lái)推導(dǎo)控制器。文獻(xiàn)[9]中提出的指數(shù)趨近律雖然在快速趨近的同時(shí)可以使運(yùn)動(dòng)點(diǎn)到達(dá)滑模面的速度較小,但是其切換帶為帶狀,會(huì)使系統(tǒng)在滑模面附近產(chǎn)生高頻抖振。為了保證滑模良好的趨近特性,根據(jù)導(dǎo)彈控制系統(tǒng)的時(shí)變性來(lái)改進(jìn)趨近律,即:
(5)

將式(4)代入式(5)可得:
(6)
結(jié)合式(3),并且由于目標(biāo)加速度分量atyl(t)在實(shí)際中難以得到,故將其視為外部干擾,而在選取變結(jié)構(gòu)項(xiàng)增益ξ1時(shí)加以補(bǔ)償。于是得到:
(7)
(8)

(9)

(10)
同理可得側(cè)向通道的變結(jié)構(gòu)控制律為:
(11)

3 基于模糊RBF網(wǎng)絡(luò)的變結(jié)構(gòu)控制器
變結(jié)構(gòu)制導(dǎo)律式(10)和式(11)的第一項(xiàng)為比例導(dǎo)引項(xiàng),第二項(xiàng)為變結(jié)構(gòu)項(xiàng)。為了應(yīng)付大機(jī)動(dòng)目標(biāo),在變結(jié)構(gòu)制導(dǎo)中,ξ1和ξ2必須取得足夠大,但這樣會(huì)造成在目標(biāo)機(jī)動(dòng)程度較小時(shí)視線角速率出現(xiàn)抖振。為了保證制導(dǎo)律的魯棒性和達(dá)到消除抖振的目的,增益值應(yīng)為隨目標(biāo)機(jī)動(dòng)而變化的自適應(yīng)參數(shù)。對(duì)此,本文采用模糊RBF網(wǎng)絡(luò)對(duì)切換增益進(jìn)行在線自適應(yīng)調(diào)節(jié)。控制策略是將滑模面及其導(dǎo)數(shù)作為模糊RBF網(wǎng)絡(luò)的輸入變量,輸出即為變結(jié)構(gòu)項(xiàng)的增益ξ1和ξ2。下面僅以縱向通道為例進(jìn)行推導(dǎo)。
模糊RBF網(wǎng)絡(luò)本質(zhì)上是將常規(guī)的RBF網(wǎng)絡(luò)賦予模糊輸入信號(hào)和模糊權(quán)值,具有很強(qiáng)的非線性逼近和自學(xué)習(xí)能力[11]。其網(wǎng)絡(luò)結(jié)構(gòu)如下:

第4層:輸出層。實(shí)現(xiàn)結(jié)論及規(guī)則間的推理,即:
式中:l為輸出層節(jié)點(diǎn)的個(gè)數(shù);W為輸出層節(jié)點(diǎn)與第3層各節(jié)點(diǎn)的連接權(quán)矩陣。
模糊RBF網(wǎng)絡(luò)的學(xué)習(xí)算法設(shè)計(jì)如下:

輸出層權(quán)值通過(guò)如下方式調(diào)整:
(12)
式中:η∈(0,1)為學(xué)習(xí)速率。
(13)
式中:α∈(0,1)為動(dòng)量因子。
隸屬函數(shù)參數(shù)通過(guò)如下方式調(diào)整:
(14)
(15)
其中:
(16)
則隸屬函數(shù)參數(shù)學(xué)習(xí)算法為:
(17)
(18)
側(cè)向通道的模糊RBF網(wǎng)絡(luò)設(shè)計(jì)與縱向通道類似,在此不再贅述。
4 仿真結(jié)果及分析
設(shè)導(dǎo)彈初始速度為VM0=400 m/s,初始位置為(0,1,0) km。假設(shè)目標(biāo)在水平通道內(nèi)作破裂“S”形運(yùn)動(dòng),初始速度為VT0=300 m/s,初始位置為(10,2,10) km。模糊RBF網(wǎng)絡(luò)參數(shù)選取如下:i=2,j=5;權(quán)值元素均初始化為零;cij和bj的各元素值均初始化為1。將采用式(10)和式(11)的固定增益變結(jié)構(gòu)制導(dǎo)律(VSG)(參數(shù)設(shè)置為k1=k2=4,ξ1=ξ2=10)與文中基于模糊RBF網(wǎng)絡(luò)的自適應(yīng)變結(jié)構(gòu)制導(dǎo)律(FRBFVSG)(參數(shù)設(shè)置為k1=k2=4,η=0.5,α=0.05)進(jìn)行仿真對(duì)比,結(jié)果如圖2~圖6所示。
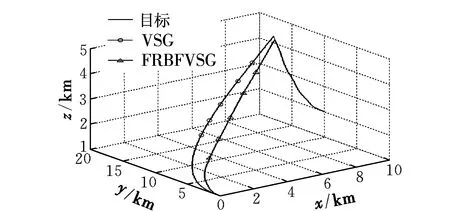
圖2 三維空間攔截軌跡圖Fig.2 Interception tracks in three-dimensional space
由圖2可以看出,在制導(dǎo)初始段FRBFVSG的彈道比VSG稍微彎曲一些,而后半段則較為平直。其主要原因是FRBFVSG在初始段需要以更大的機(jī)動(dòng)過(guò)載使視線角速率盡快收斂到零值附近。仿真結(jié)果如下:VSG的脫靶量為1.436 2 m,攔截時(shí)間為23.50 s;FRBFVSG的脫靶量為0.348 1 m,攔截時(shí)間為22.88 s。即相比于采用VSG制導(dǎo)律,采用FRBFVSG可以在提高攔截精度的同時(shí)縮短攔截時(shí)間。
由圖3和圖4可以看出,在兩個(gè)通道上FRBFVSG較VSG而言均可以在更短的時(shí)間內(nèi)到達(dá)滑模面,并保持穩(wěn)定。從圖5中可以看出,VSG的滑模面在攔截末端出現(xiàn)了明顯的發(fā)散,即FRBFVSG的系統(tǒng)狀態(tài)趨近特性優(yōu)于VSG。
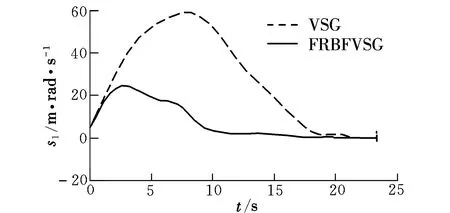
圖3 縱向通道滑模面變化曲線Fig.3 Sliding mode curves in vertical channel
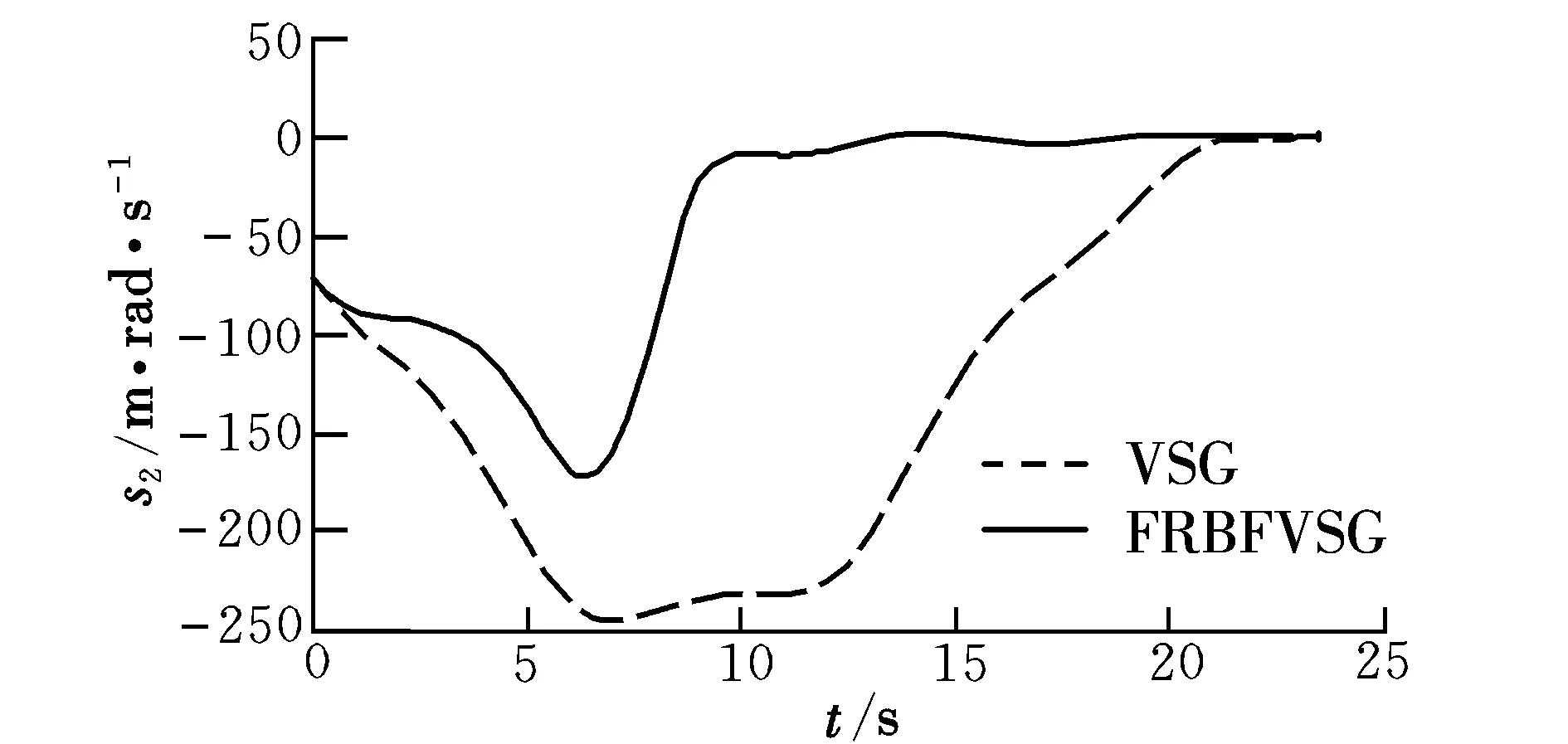
圖4 側(cè)向通道滑模面變化曲線Fig.4 Sliding mode curves in horizontal channel
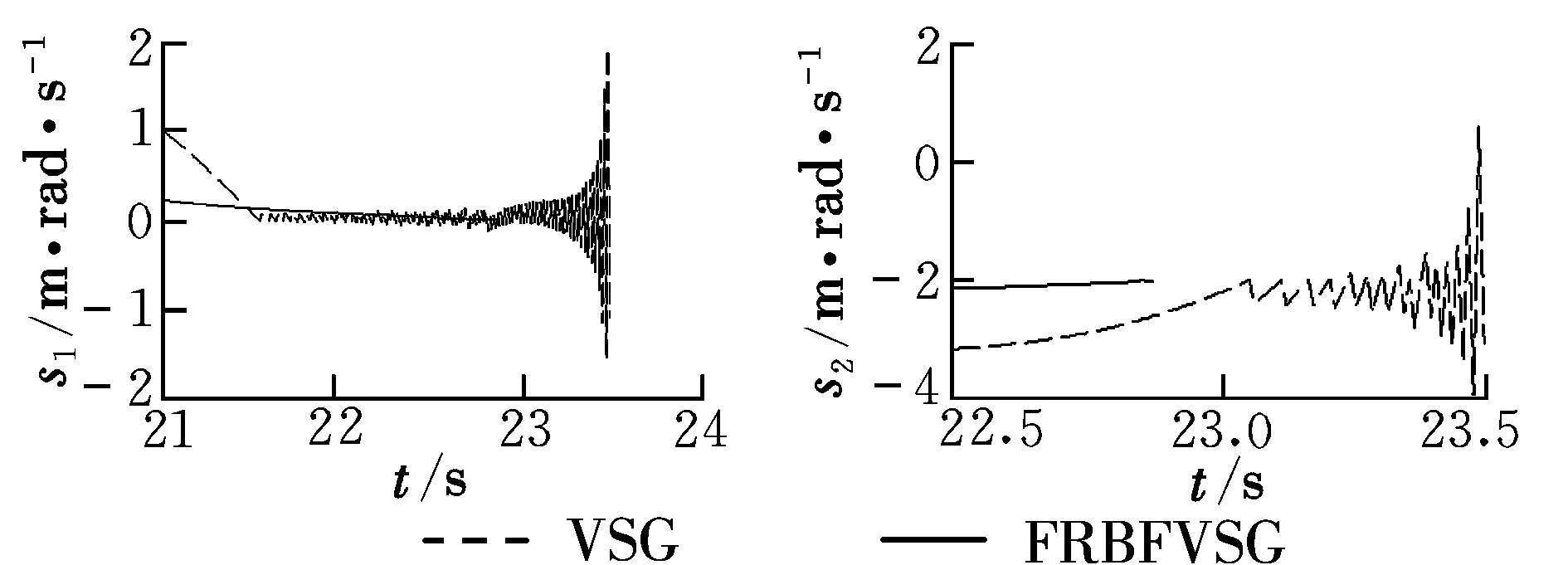
圖5 縱向和側(cè)向通道滑模面末端放大圖Fig.5 Amplified figure of tail end of the sliding mode curves in vertical and horizontal channel
由圖6可知,VSG由于切換增益固定,制導(dǎo)過(guò)程的末端視線角速率突增,并發(fā)生高頻抖振,這種抖振不僅影響導(dǎo)彈的制導(dǎo)效果,而且不利于彈上部件的正常工作,而FRBFVSG由于對(duì)切換增益進(jìn)行了自適應(yīng)調(diào)節(jié),全程視線角速率變化較為平滑,且能在有限時(shí)間內(nèi)收斂至零值附近并保持穩(wěn)定,很好地削弱了系統(tǒng)的抖振,增強(qiáng)了系統(tǒng)的魯棒性。
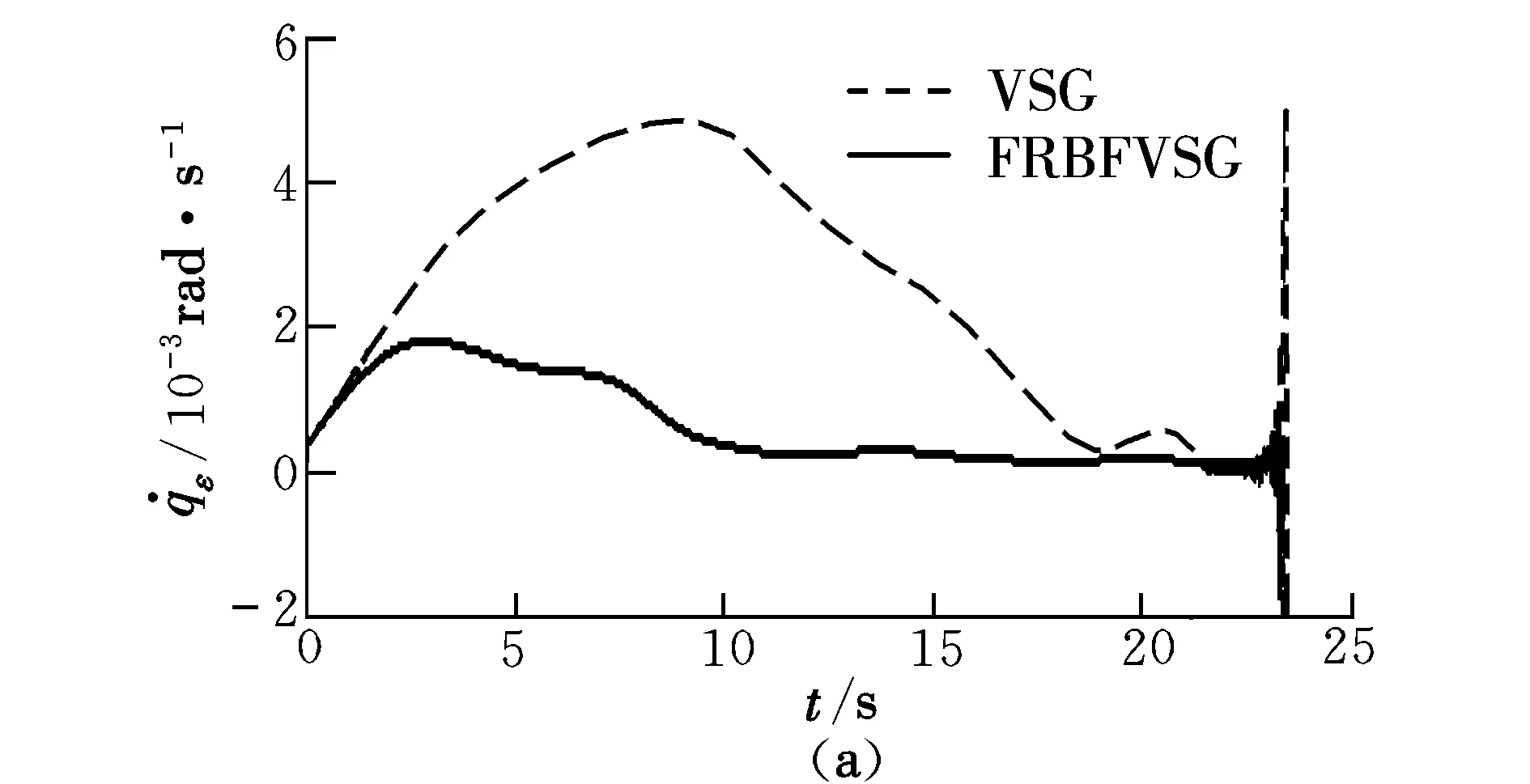
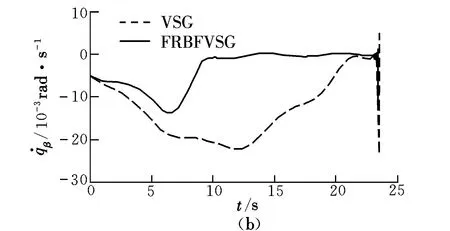
圖6 視線角速率變化曲線Fig.6 Line of sight angular rate curves
5 結(jié)束語(yǔ)
針對(duì)機(jī)動(dòng)目標(biāo)的攔截問(wèn)題,本文提出了基于模糊RBF網(wǎng)絡(luò)的自適應(yīng)變結(jié)構(gòu)制導(dǎo)律,改進(jìn)了傳統(tǒng)的趨近律,并引入模糊RBF網(wǎng)絡(luò),對(duì)變結(jié)構(gòu)項(xiàng)的增益進(jìn)行在線自適應(yīng)調(diào)節(jié)。仿真結(jié)果表明,相比于傳統(tǒng)變結(jié)構(gòu)制導(dǎo)律,該制導(dǎo)律可以提高攔截精度和減少攔截時(shí)間,且能更有效地削弱系統(tǒng)的抖振,對(duì)于機(jī)動(dòng)目標(biāo)的攔截具有較強(qiáng)的魯棒性。
[1]周迪.尋的導(dǎo)彈新型導(dǎo)引規(guī)律[M].北京:國(guó)防工業(yè)出版社,2002:5-14.
[2]Zhou D,Mu C,Ling Q,et al.Optimal sliding-mode guidance of a homing-missile[C]//Proceedings of the IEEE Conference on Decision and Control.USA:Phoenix,1999:5131-5136.
[3]Abedi M,Bolandi H,Saberi F F,et al.An adaptive RBF neural guidance law surface to air missile considering target and control loop uncertainties[C]//Industrial Electronics,ISIE 2007,IEEE International Symposium.USA:IEEE,2007:257-262.
[4]鄭守軍,姜長(zhǎng)生.空空導(dǎo)彈三維自適應(yīng)模糊滑模制導(dǎo)律設(shè)計(jì)[J].電光與控制,2008,15(1):12-16.
[5]孫勝,周荻.離散滑模導(dǎo)引律設(shè)計(jì)[J].航空學(xué)報(bào), 2008,29(6):1634-1639.
[6]王華吉,簡(jiǎn)金蕾,雷虎民,等.帶擴(kuò)張觀測(cè)器的新型滑模導(dǎo)引律[J].固體火箭技術(shù),2015,38(5):622-627.
[7]劉永善,劉藻珍,李蘭忖.攻擊機(jī)動(dòng)目標(biāo)的被動(dòng)尋的模糊變結(jié)構(gòu)制導(dǎo)律研究[J].系統(tǒng)工程與電子技術(shù),2007,29(2):254-258.
[8]史小平,常瑩瑩.非線性三維自適應(yīng)模糊變結(jié)構(gòu)制導(dǎo)規(guī)律的研究[J].宇航學(xué)報(bào),2009,30(6):2171-2175.
[9]高為炳.變結(jié)構(gòu)控制理論基礎(chǔ)[M].北京:中國(guó)科學(xué)技術(shù)出版社,1990:28-30.
[10]錢(qián)杏芳,林瑞雄,趙亞男.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2008:28-48.
[11]劉金琨.智能控制[M].北京:電子工業(yè)出版社,2014:158-164.
(編輯:姚妙慧)
Design of adaptive variable structure guidance law based on fuzzy RBFNN
ZHOU De-yun, YANG Zhen, ZHANG Kun
(School of Electronics and Information, NWPU, Xi’an 710129, China)
For intercepting high speed and big maneuvering target in the air, although the traditional variable structure guidance law has good robustness for external interference and parameter perturbation, there are also some shortcomings, such as the jitter of line-of-sight angular rate and undeterminable parameters. In view of this, a three-dimensional adaptive variable structure guidance law was presented which regarded the target acceleration as external interference and adjusted the gain of variable structure adaptively online by Fuzzy RBF neural network which has a good self-learning ability. Simulation results indicate that the guidance law can weaken the system jitter effectively, improve the precision of guidance and has a good adaptability for high maneuvering target.
missile intercept; three-dimensional guidance law; variable structure; fuzzy RBFNN; adaptation
2015-11-09;
2016-03-24; 網(wǎng)絡(luò)出版時(shí)間:2016-04-22 09:52
國(guó)家自然科學(xué)基金資助(61401363);航空科學(xué)基金資助(20155153034);西北工業(yè)大學(xué)研究生創(chuàng)意創(chuàng)新種子基金資助(Z2015016)
周德云(1964-),男,浙江義烏人,教授,博士生導(dǎo)師,主要研究方向?yàn)橄冗M(jìn)航空火力控制、航空武器系統(tǒng)工程;
楊振(1993-),男,安徽滁州人,碩士研究生,主要研究方向?yàn)楦欀茖?dǎo)、智能控制。
TJ765.3
A
1002-0853(2016)04-0054-05
猜你喜歡
小獼猴智力畫(huà)刊(2023年4期)2023-04-23 08:49:58
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學(xué)生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
七彩語(yǔ)文·寫(xiě)字與書(shū)法(2016年7期)2016-07-28 21:40:22
七彩語(yǔ)文·寫(xiě)字與書(shū)法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
