深海立管作業(yè)機(jī)器人摩擦學(xué)與可靠性研究概述
2016-09-05 03:58:21譚桂斌王德國陳迎春
石油礦場機(jī)械 2016年5期
譚桂斌,王德國,陳迎春
(1.廣州機(jī)械科學(xué)研究院有限公司 國家橡塑密封工程技術(shù)研究中心,廣州 510535;2.國家機(jī)器人檢測與評定中心(廣州),廣州 510535;3.中國石油大學(xué)(北京) 機(jī)械與儲運工程學(xué)院,北京102249 )
?
技術(shù)綜述
深海立管作業(yè)機(jī)器人摩擦學(xué)與可靠性研究概述
譚桂斌1,2,3,王德國3,陳迎春3
(1.廣州機(jī)械科學(xué)研究院有限公司 國家橡塑密封工程技術(shù)研究中心,廣州 510535;2.國家機(jī)器人檢測與評定中心(廣州),廣州 510535;3.中國石油大學(xué)(北京) 機(jī)械與儲運工程學(xué)院,北京102249 )
我國管道輸送安全保障特種作業(yè)機(jī)器人的研究與世界先進(jìn)水平存在差距,制約了我國海洋資源勘探開發(fā)水平。從摩擦學(xué)和可靠性角度分析海洋立管作業(yè)機(jī)器人設(shè)計制造和服役的主要特點。介紹了海洋管道和立管作業(yè)機(jī)器人的主要作用。分別討論了管道清理機(jī)器人、智能檢測機(jī)器人、海管維修張緊器設(shè)備、智能式封堵機(jī)器人等服役過程的摩擦學(xué)系統(tǒng)和可靠性研究進(jìn)展。從管道輸送的流動保障、節(jié)能降耗、安全高效,及機(jī)器人安全可靠運行、檢測及評定等方面進(jìn)行了探討。提出了海洋立管作業(yè)機(jī)器人的研究建議。
海上平臺;立管;機(jī)器人;可靠性
目前,我國石油勘探開發(fā)向深海、深部、沙漠、高寒及海外發(fā)展,對石油裝備性能和可靠性提出了更高要求,然而對其摩擦學(xué)和可靠性研究不系統(tǒng)。此外,在石油裝備制造領(lǐng)域,國產(chǎn)化深井海洋鉆機(jī)、成套壓裂設(shè)備、半潛式鉆井平臺、深海鋪管船等大型設(shè)施得到了應(yīng)用,但是基礎(chǔ)件(元器件)、基礎(chǔ)材料等出現(xiàn)了“空殼化”,所以開展應(yīng)用基礎(chǔ)研究和產(chǎn)業(yè)化具有重要意義。2010年,墨西哥灣“深水地平線”平臺爆炸沉沒后導(dǎo)致了立管的破裂、漏油,造成巨大損失;2013年,中石化黃島管道爆燃事故;2014年,高雄市管道爆燃事故。這些事故都引起國內(nèi)外廣泛關(guān)注。所以,在國家政策引導(dǎo)下,特種機(jī)器人在石油行業(yè)大有可為。以宏觀視角看,其產(chǎn)業(yè)鏈涵蓋核心零部件、機(jī)器人本體、系統(tǒng)集成及行業(yè)應(yīng)用等4方面。中國在工業(yè)轉(zhuǎn)型升級階段必須抓住機(jī)遇,在企業(yè)、科研院所和高校之間進(jìn)行分工與合作,加強(qiáng)深海作業(yè)機(jī)器人技術(shù)研究。本文討論海洋立管作業(yè)機(jī)器人服役摩擦學(xué)與可靠性基礎(chǔ)科學(xué)問題,以期增強(qiáng)海洋油氣勘探開發(fā)和安全保障裝備水平。
1 海洋立管智能檢測與維護(hù)技術(shù)進(jìn)展
1.1海洋立管在役檢測和維護(hù)的難題
鉆井立管、生產(chǎn)立管等是海上石油生產(chǎn)的關(guān)鍵裝備之一。工信部2014年《海洋工程裝備工程實施方案》,建議通過集成創(chuàng)新和協(xié)同創(chuàng)新,加強(qiáng)浮式鉆井生產(chǎn)儲卸裝置(FDPSO)、自升鉆井儲卸油平臺等裝備的研發(fā)設(shè)計和建造技術(shù)研究,其中浮式結(jié)構(gòu)物“單點系泊系統(tǒng)”和離岸“單點系泊輸油終端系統(tǒng)”是關(guān)鍵裝備。系泊裝置包括系泊頭、旋轉(zhuǎn)接頭、海洋立管等,它直接影響海上油田產(chǎn)能。立管是海底管道和浮式結(jié)構(gòu)物之間的必經(jīng)安全通道,防止油氣介質(zhì)泄漏與污染環(huán)境。此外,旋轉(zhuǎn)接頭和密封裝置保障了腐蝕介質(zhì)流動及浮式結(jié)構(gòu)物自由度。但是,海洋立管服役時檢測、維護(hù)與緊急救援過程,需要怎樣的輕便快捷機(jī)器人技術(shù)工藝?系泊裝置的旋轉(zhuǎn)接頭密封系統(tǒng)有怎樣失效模式?哪些關(guān)鍵的摩擦學(xué)與可靠性問題亟需解決? 這些難題都關(guān)系到海上石油生產(chǎn)的安全。
深海油氣勘探開發(fā)時,單點系泊裝置、立管、水下采油樹等是海洋工程核心裝備,主要難點是核心設(shè)計建造和維護(hù)技術(shù)[1]。因此,2013年工信部等支持開展了單點系泊裝置功能分析和設(shè)計參數(shù)研究、單點系泊裝置結(jié)構(gòu)設(shè)計和多種接卸管路系統(tǒng)設(shè)計與分析、旋轉(zhuǎn)接頭浮筒及其主要附屬裝置設(shè)計研究等。現(xiàn)階段,雖然國內(nèi)開展了大量的設(shè)計研制工作,但浮式結(jié)構(gòu)物、系泊裝置和立管均在海上服役10 a以上,在強(qiáng)腐蝕介質(zhì)、高低溫、非線性振動等環(huán)境下,其損傷檢測、維護(hù)和緊急救援機(jī)器人技術(shù)非常重要,也存在諸多摩擦學(xué)與可靠性難題待攻克。
1.2基于柔性桿技術(shù)的海洋立管檢測方法研究
深水環(huán)境的立管檢測和緊急救援十分重要,因為管道從平臺至海床的懸空段受風(fēng)、浪、潮、海冰等影響而多自由度垂蕩,尤其是浪花飛濺區(qū)腐蝕影響,就使得懸空管段的腐蝕區(qū)域與應(yīng)力驟變區(qū)產(chǎn)生損傷(如水深500~ 3 000 m)。由于深海水下油氣輸送系統(tǒng)環(huán)境惡劣,從而使管道介質(zhì)工況復(fù)雜、救援成本更高,急需穩(wěn)定可靠的便捷修復(fù)技術(shù);如果采用發(fā)球筒和收球筒工藝,或人工潛水等方式,管線將面臨卡堵和停輸風(fēng)險。所以,輕便快捷的立管救援工藝與技術(shù)裝備在海管輸送時可兼具安全、高效兩大目標(biāo),由于海上平臺柔性管作業(yè)適用性強(qiáng),機(jī)動性好,已成為熱門的深海立管維護(hù)和檢測方法。為提高該技術(shù)裝備的適用性和安全可靠性,需要系統(tǒng)的分析和討論相關(guān)應(yīng)用摩擦學(xué)和技術(shù)進(jìn)展[2]。
在深海油氣管道輸送時,基于海洋平臺的連續(xù)管(Coil Tubing,CT)作業(yè)工藝,在去除水合物、流動保障、管道檢測、修復(fù)維護(hù)等方面具有靈活輕便及效率高等優(yōu)點。2015年,譚桂斌等[3]、陳迎春等人[4]將細(xì)長柔性桿與智能裝備用于海洋立管檢測和井筒清理等,還嘗試用于管端維修,如圖1所示。該作業(yè)工藝能夠連接不同功能的機(jī)器人,送入海底管道后進(jìn)行便捷檢測或維護(hù),以避免復(fù)雜工況下清管器發(fā)送、回收等高風(fēng)險過程。然而,為了避免管內(nèi)卡堵或介質(zhì)停輸?shù)葐栴},從摩擦學(xué)和可靠性角度出發(fā),可開展以下研究:
1)分析不同類型蠟沉積物、水合物等介質(zhì)去除率和摩擦學(xué)規(guī)律[5]。
2)分析內(nèi)檢測裝備在立管內(nèi)運移時的非線性振動和摩擦接觸特性等[6]。
3)在立管維護(hù)和檢測前進(jìn)行技術(shù)適用性分析。
4)管內(nèi)智能機(jī)器人作業(yè)的系統(tǒng)可靠性驗證和評價。
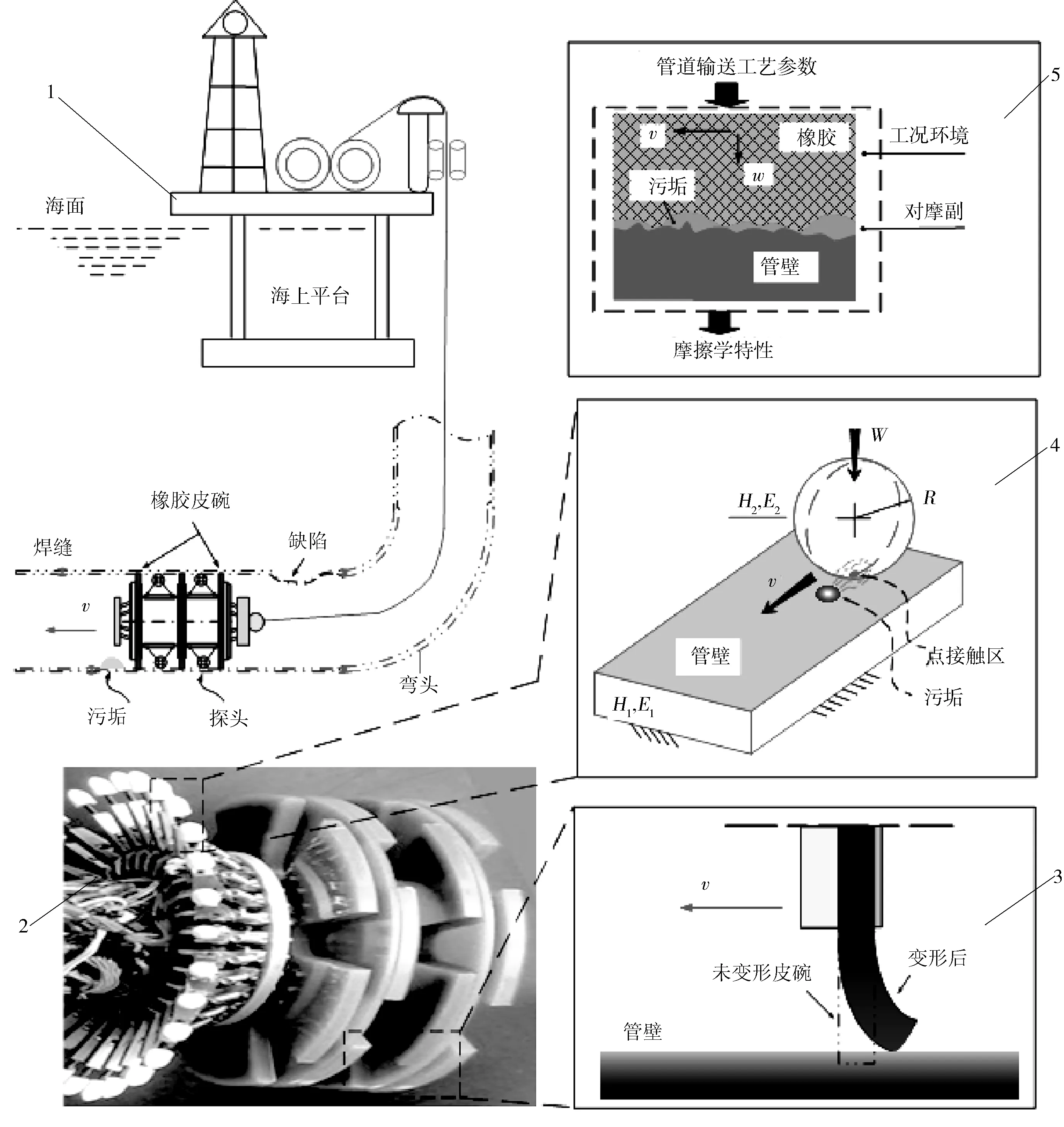
1—作業(yè)機(jī)器人和平臺示意;2—檢測組件結(jié)構(gòu);3—密封摩擦副;4—點接觸副;5—機(jī)器人關(guān)鍵部件摩擦學(xué)系統(tǒng)模型。
2 立管作業(yè)機(jī)器人及其服役可靠性研究進(jìn)展
石油和天然氣“安全、高效、經(jīng)濟(jì)”的鉆探及采輸能力成為事關(guān)國家社會經(jīng)濟(jì)穩(wěn)定的重要因素之一。開展陸地/海底輸送管道完整性管理,提高管道檢測和維修技術(shù),進(jìn)行海洋立管和陸上管道的作業(yè)機(jī)器人技術(shù)研究,面臨以下幾方面難題。
2.1管壁損傷和缺陷內(nèi)檢測技術(shù)裝備的安全可靠性
現(xiàn)階段,雖然國內(nèi)開展了陸地和海底管道檢測器研制,但是技術(shù)方面與國外還有較大差距,還需要突破。然而,國外廠家對管道內(nèi)檢測裝備嚴(yán)格保密、在全世界全面技術(shù)封鎖,賺取高額檢測費用,國外的內(nèi)檢測裝備搭載三維測繪組件能隨意獲取我國戰(zhàn)略數(shù)據(jù)(陸地、海岸和深海),影響我國安全。所以,為了提高國產(chǎn)化管道內(nèi)檢測裝備的準(zhǔn)確性、精度及作業(yè)安全,需要從裝備具體的工作環(huán)境出發(fā)進(jìn)行研究,特別是從內(nèi)檢測裝備與管道組成的摩擦學(xué)系統(tǒng)的角度開展研究。此外,近30 a來摩擦學(xué)的減摩耐磨、改善潤滑的設(shè)計理論已發(fā)展到節(jié)能、節(jié)材、減排、減振、降噪以及改善機(jī)械裝備服役的生命質(zhì)量[7]。為提高缺陷內(nèi)檢測和定位精度,需要研究摩擦界面失穩(wěn)、污垢微觀去除、介質(zhì)流動遷移及蠟塞淤積等機(jī)制,從摩擦學(xué)試驗臺、測試方法、試驗建模、應(yīng)用基礎(chǔ)等層面開展工作。
另外,開展管道內(nèi)檢測技術(shù)研究(如圖2所示),尤其是通過試驗揭示不同介質(zhì)條件下、不同內(nèi)檢測器運動過程中的摩擦學(xué)作用機(jī)制,有助于開展裝備結(jié)構(gòu)、技術(shù)參數(shù)和工藝優(yōu)化研究。其中,圖2a為管道幾何測徑作業(yè),用普通的圓板鋁盤初探管道變形情況;圖2b為鋁盤初步測徑作業(yè)之后,選取合適清管工藝[8],去除管內(nèi)污垢以提高內(nèi)檢測裝備運行平穩(wěn)度,減輕管道腐蝕速率和失效風(fēng)險[9];圖2c為管道變形智能通徑儀,它利用高精度傳感器探頭采集管壁變形量,同時進(jìn)行準(zhǔn)確定位,高精度基線檢測和幾何變形數(shù)據(jù)能夠避免檢測器卡堵;圖2d為不同功能單元組成的多功能內(nèi)檢測機(jī)器人,它在橡膠皮碗支撐和驅(qū)動作用下沿管道運行。所以,深入的研究橡膠皮碗摩擦學(xué)特性以保障管內(nèi)機(jī)器人運行平穩(wěn)性,將直接影響到管道內(nèi)檢測準(zhǔn)確性、精度及輸送安全保障的水平。
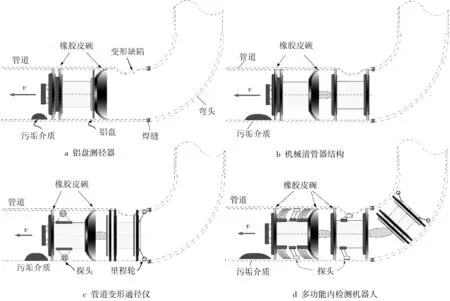
圖2 管道內(nèi)檢測裝備和密封摩擦副簡圖[3]
從管道智能機(jī)器人與管壁組成密封接觸系統(tǒng)的角度出發(fā),譚桂斌等[3,10]建立了非穩(wěn)態(tài)運移過程的動力學(xué)方程:
(1)
式中:m為機(jī)器人總質(zhì)量;a為加速度;dpipe為管道內(nèi)徑;λ為管道與水平面的夾角;Δp為橡膠密封皮碗前后流體壓差;Fc為蠟沉積物的機(jī)械剝離阻力(假設(shè)未出現(xiàn)蠟塞運移過程,Wax-slug transportating);Fm為不同數(shù)量橡膠密封件與鋼管非穩(wěn)態(tài)摩擦阻力。
另外,根據(jù)管內(nèi)機(jī)器人驅(qū)動方式分為柔性管注入式[11]、流體壓差驅(qū)動式[12]及電機(jī)牽引式等[13],高端橡塑密封件是保障機(jī)器人安全可靠的核心元件,而且可以提供高可靠的支撐和壓差驅(qū)動力。不論陸地還是海洋環(huán)境的管道作業(yè),如圖2~3所示,從內(nèi)檢測裝備與管壁組成摩擦學(xué)系統(tǒng)的角度出發(fā),譚桂斌等[14]研究了蠟層不斷剝落、堆疊的物理模型,討論了摩擦入口區(qū)的污垢體積增加、卡堵概率問題,以避免管道淤塞、設(shè)備卡堵。但是,國內(nèi)外對蠟層剝離過程和動態(tài)變化規(guī)律還缺乏系統(tǒng)性的研究成果,橡膠皮碗運動的系統(tǒng)摩擦學(xué)理論,也暫未用于現(xiàn)場管道蠟沉積物去除的工藝優(yōu)化。
2.2管道損傷缺陷檢測與現(xiàn)場作業(yè)可靠性難題
2013-11-22,中國石化東黃管道原油泄漏后爆炸燃燒(簡稱黃島管道爆燃事故),造成62人死亡、直接經(jīng)濟(jì)損失7.5億元,成為我國最嚴(yán)重管道事故,而事故發(fā)生直接原因是埋地管道腐蝕減薄、破裂,在應(yīng)急修復(fù)時違規(guī)動火作業(yè)。這涉及了管道應(yīng)急救援技術(shù)與現(xiàn)場風(fēng)險控制。隨后類似事故:2014-06-30,大連某企業(yè)定向鉆時,將中國石油新大一線輸油管道破壞后泄漏爆炸;臺灣高雄市一條丙烯管道于2014-07-31,在市區(qū)泄漏爆燃,28人遇難、287人受傷,另有2人失蹤,遺憾的是,破壞現(xiàn)場與黃島管道爆燃事故極其相似[15]。
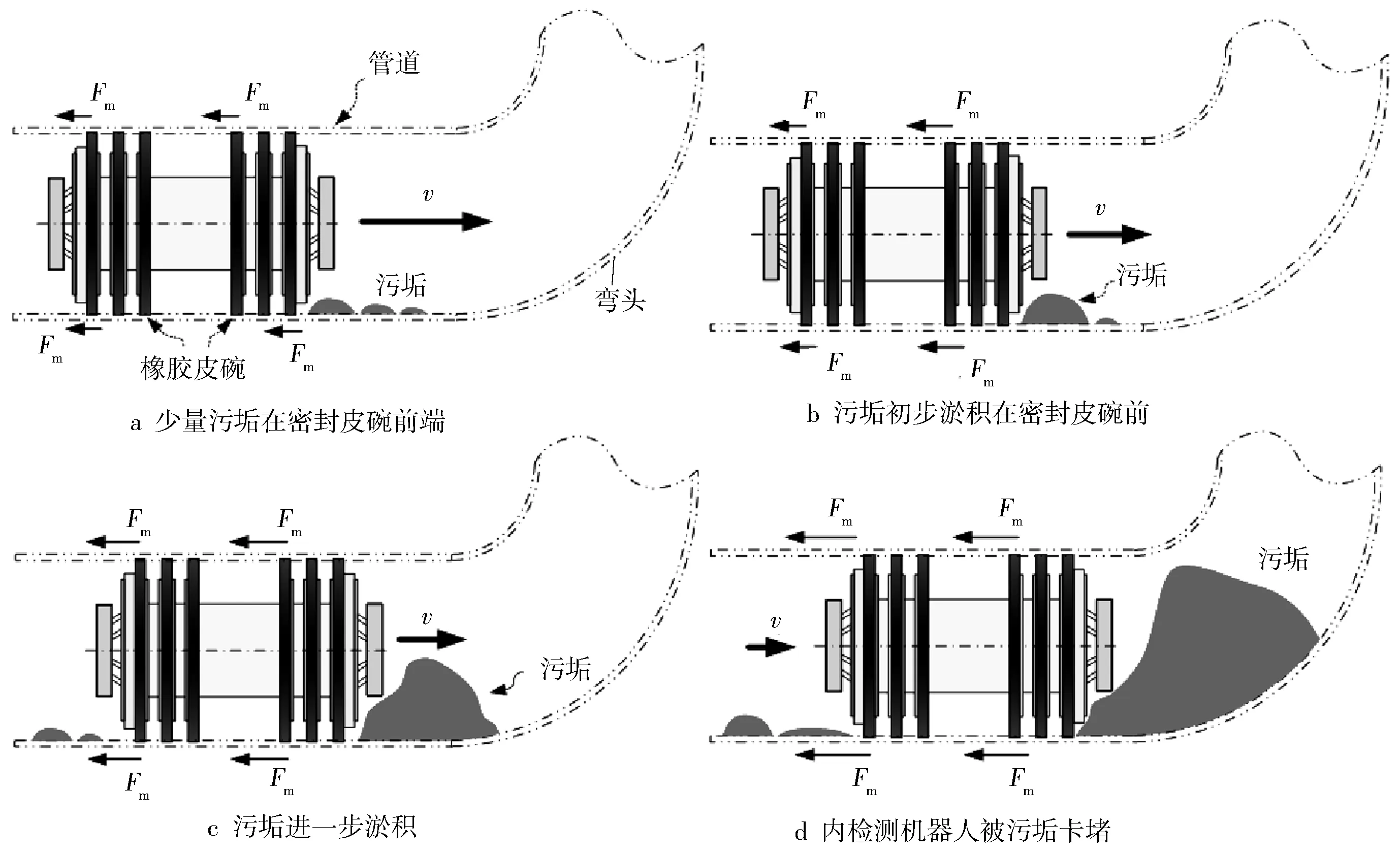
圖3 管道機(jī)器人前方污垢淤積摩擦學(xué)模型
值得大家認(rèn)真思考的是,我國引入油氣管道(包括了長輸埋地鋼管、集輸管道與深海管道等)完整性管理體系和技術(shù)裝備并在企業(yè)應(yīng)用約10 a,也組建了大型的油氣管道應(yīng)急維搶修技術(shù)隊伍[16],一方面,為什么還有如此惡劣管道損傷泄漏、爆燃災(zāi)難,從基礎(chǔ)理論和行業(yè)應(yīng)用等角度看,特種環(huán)境管內(nèi)機(jī)器人怎樣高效率、高可靠性的設(shè)計制造和服役?另一方面,鋼制管道內(nèi)污垢分布不均勻,管道運營企業(yè)擔(dān)心作業(yè)裝備在“黑箱”環(huán)境出現(xiàn)事故,業(yè)主關(guān)心怎樣安全、高效控制管壁潔凈度?此外,現(xiàn)場作業(yè)時不同的管內(nèi)機(jī)器人通常也難以高精度、高可靠性、高效率運行,究竟有哪些主要影響因素?
避免清管檢測裝備服役時出現(xiàn)里程輪打滑卡球、堵管、盲目開挖甚至割管事故,需解決兩方面的問題。①需解決管內(nèi)裝備服役過程的關(guān)鍵基礎(chǔ)問題,包括污垢淤積變化、污垢殘留粘附、構(gòu)件磨損失效、摩擦阻力問題、蠟層歷史老化效應(yīng)、內(nèi)檢測器前端漿液流變學(xué)特性等;②基于前一部分研究,建立清管動力學(xué)模型,智能化控制清管檢測裝備的運動規(guī)律,最終指導(dǎo)現(xiàn)場的施工工藝制定、參數(shù)優(yōu)化與檢測精度提高等。前一部分是后一部分的基礎(chǔ)。目前,正是由于前一部分的基礎(chǔ)問題尚未揭示清楚,在結(jié)構(gòu)優(yōu)化、參數(shù)選取、工藝制定方面與國外存在很大差距,阻礙了我國在管道運營和維護(hù)、高精度缺陷檢測和定位等技術(shù)裝備進(jìn)步。
2.3海底管道維修和修復(fù)的摩擦學(xué)與可靠性
目前,我國海底管道服役老化已進(jìn)入事故高發(fā)期且新建管道還在增加,需研究不同服役工況的高可靠性、高平穩(wěn)性、高精度管道維修與救援技術(shù)。例如,我國在鋪管/鋪纜設(shè)備及其核心裝置方面,逐步形成了研發(fā)和建造技術(shù)能力,但是控制精度、穩(wěn)定性及其基礎(chǔ)零部件等方面與國外的差距很大,在一定程度上制約了我國海管打撈救援與維修水平。另外,深水油氣管道安裝投產(chǎn)、修復(fù)及更換等作業(yè)過程中(如圖4所示),深海鋪管船張緊器的彈性墊塊和管子構(gòu)成了橡膠摩擦學(xué)系統(tǒng)[17];圖4所示(序號1)管子鋪設(shè)過程中管內(nèi)機(jī)器人運動時,橡膠皮碗與管道等組成摩擦學(xué)系統(tǒng),橡膠和管壁密封系統(tǒng)的磨損失效等應(yīng)用基礎(chǔ)研究還有待加強(qiáng)。
中海油梁富浩等[18]綜述了海底管道維修系統(tǒng)DPRS (Deepwater Pipeline Repair System)主要組成和工藝,介紹了深水海管維修技術(shù)難點;雖然國內(nèi)初步研究了雙層管聲學(xué)檢漏、封堵卡具等裝置,也開展了海試等功能驗證,但尚未見可靠性設(shè)計[19]。此外,由于深海和陸上管道的維搶修技術(shù)壟斷性,我國在管道救援時主要采用開孔機(jī)、筒刀、封堵三通、封堵器等[20]。我國正處于工業(yè)轉(zhuǎn)型升級時期,在智能裝備和新型機(jī)器人科技協(xié)同攻關(guān)時,應(yīng)加強(qiáng)野外和受限環(huán)境管道救援機(jī)器人研究與實際應(yīng)用,進(jìn)一步提高其信息化、智能化、數(shù)字化水平等。
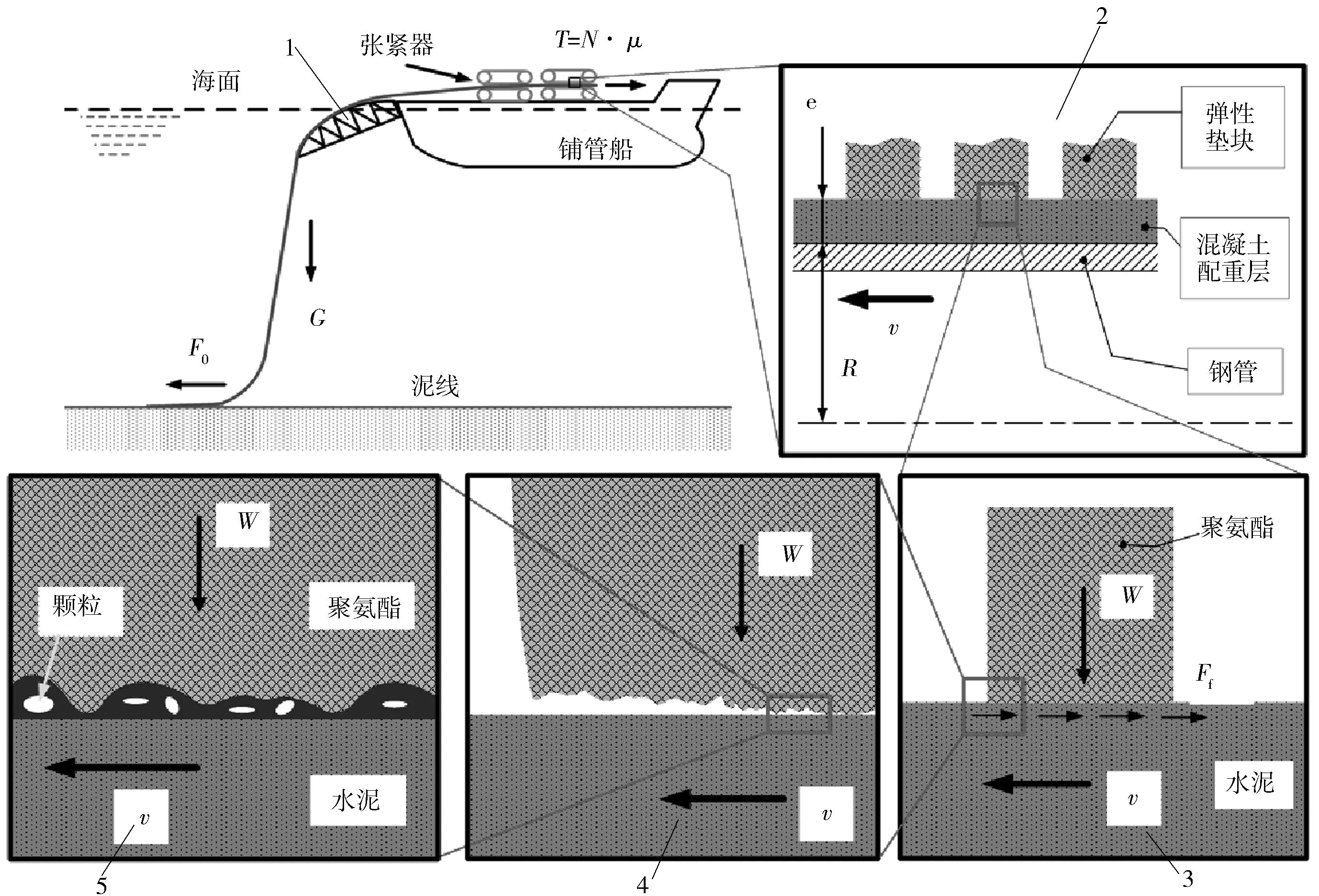
1—鋪管張緊器和海底管道簡圖;2—張緊器橡膠塊摩擦副;3—摩擦力和夾緊力;4—摩擦微間隙簡圖;5—橡膠摩擦副。
2.4海洋水下管道管內(nèi)封堵式機(jī)器人技術(shù)
隨著我國海上油田生產(chǎn)模式優(yōu)化、井口布局調(diào)整、港口航道升級及管道鋪設(shè)里程增加等[21],海底管道和立管的維修封堵案例增加,對高可靠度、高性能、高精度的管內(nèi)機(jī)器人的需求越來越多[22]。海洋立管的主動或被動式管內(nèi)封堵機(jī)器人技術(shù)具有重大意義,一方面,需要在極端天氣下、生產(chǎn)事故、油井廢棄、戰(zhàn)爭紛爭等被迫封堵立管,被動地密封管內(nèi)介質(zhì)以避免泄漏污染,對智能封堵式機(jī)器人的操控精度、系統(tǒng)穩(wěn)定性、服役可靠性有苛刻要求[23];另一方面,主動式密封隔離管內(nèi)的介質(zhì)進(jìn)行輕便、快捷修復(fù)作業(yè),如閥門更換與修理、海底管線改道、增設(shè)井口與試壓檢測等[24],也需要安全、高效、便捷的封堵機(jī)器人作業(yè)技術(shù)和工藝。
如圖5所示(序號1),柔軟皮碗和剛性骨架構(gòu)成了壓差驅(qū)動組件,而高壓油缸或氣動方式擠壓封堵裝置的錨定卡瓦和橡膠密封圈實現(xiàn)高壓密封[25],封堵裝置和橡膠圈甚至密封了管內(nèi)20 MPa的壓差[26]。
此外,管內(nèi)智能封堵機(jī)器人服役過程準(zhǔn)確性、定位精度及作業(yè)安全[27],需要從裝備具體介質(zhì)條件和污垢非均勻工況等研究[28]。因此,2010年至今,譚桂斌等[29]研究了柔軟橡膠皮碗在摩擦過程跨尺度接觸模型,如圖5所示,特別是從驅(qū)動支撐皮碗(Elastomer sealing-cup)與管道組成的橡膠摩擦接觸區(qū)開展了研究,研究了橡膠摩擦真實接觸率和介質(zhì)殘留率等,建立了復(fù)雜介質(zhì)環(huán)境的橡膠摩擦學(xué)系統(tǒng)模型,從摩擦學(xué)設(shè)計和可靠性設(shè)計的角度改善管內(nèi)封堵機(jī)器人設(shè)計、制造和服役的生命質(zhì)量。
3 安全高效管道輸送應(yīng)用摩擦學(xué)和可靠性研究進(jìn)展
海洋和陸地管道輸送必須考慮安全節(jié)能、經(jīng)濟(jì)可靠等,涉及到的主要摩擦學(xué)和可靠性問題為:管壁蠟沉積物去除及防蠟防污涂層摩擦學(xué)問題;管內(nèi)作業(yè)機(jī)器人運動支撐部件和耐磨設(shè)計;輸送管道減阻防腐涂層和綠色摩擦學(xué)等。上述方向近年來取得了新進(jìn)展。
3.1管內(nèi)壁潔凈與流動保障的摩擦學(xué)與可靠性問題
若水深400 m海底管道被蠟層堵塞,修復(fù)費用高達(dá)62.14萬美元/km(100萬美元/英里),而且中國至今尚未掌握深海管道維修裝備與技術(shù)。對于深海水下、陸上管道至關(guān)重要的蠟沉積物機(jī)械式去除,主要是研究清蠟?zāi)Σ翗?gòu)件與鋼管的非線性摩擦接觸問題,針對其摩擦學(xué)系統(tǒng)的研究主要集中在蠟沉積物分布形態(tài)和機(jī)械去除效率等方面[30]。在蠟沉積物去除研究方面,國內(nèi)外通常采用密閉管道環(huán)路、冷指、油田割管等昂貴低效方法。最近中國石油大學(xué)(北京)在蠟層機(jī)械剝離過程中引入原位可視化試驗方法[31],發(fā)現(xiàn)了摩擦入口區(qū)的蠟顆粒“微淤積效應(yīng)”,建立了考慮3種不同摩擦界面的蠟層正交去除模型,還采用熒光示蹤[32]、光學(xué)觀測等可視化技術(shù)[33],深入到單個蠟晶層面揭示蠟層微去除難題。另外一個發(fā)展趨勢是,在管道流動安全保障時采用化學(xué)藥劑和旁通射流清管器提高其清防蠟效果(例如:被剝離蠟層同時受到了切削應(yīng)力場、溫度場、流體場的多物理作用),油田常用的工藝有:化學(xué)輔助式清管,在發(fā)送多個清管器之間投放不同化學(xué)藥劑;射流輔助式清管器,在機(jī)械式清管器空腔安裝新型調(diào)控裝置[34],以環(huán)狀或旋轉(zhuǎn)射流去除污垢來提高作業(yè)效率[35]。
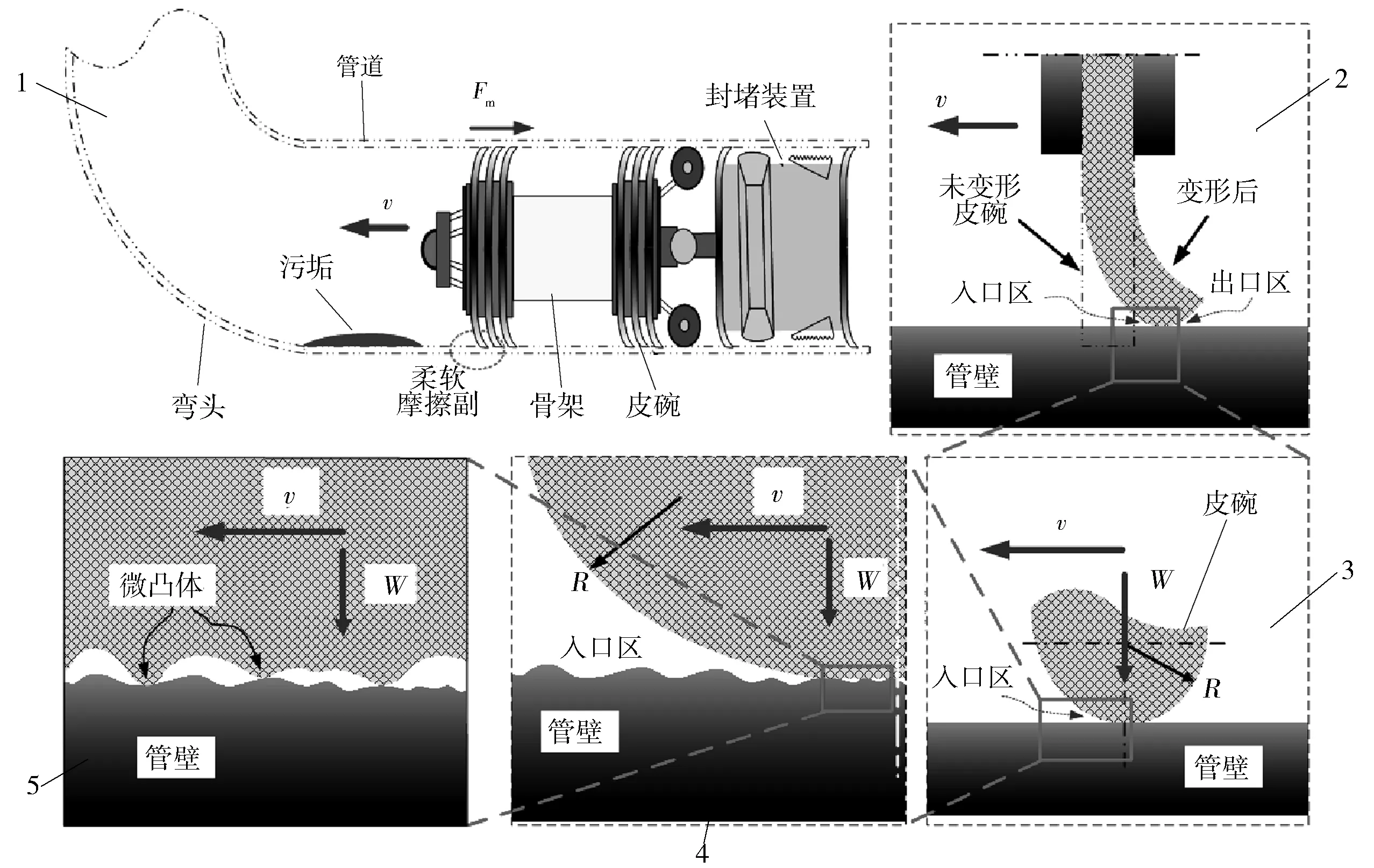
1—管道封堵式機(jī)器人簡圖;2—橡膠密封摩擦接觸;3—密封盤微接觸區(qū);4—摩擦入口區(qū)簡圖;5—橡膠摩擦微凸體模型。
到目前為止,尚無普適性模型可預(yù)測不同國家不同油田管道蠟沉積,而針對不同地區(qū)不同管段蠟沉積物的去除及其智能控制更加復(fù)雜[36]。蠟層去除效率和動態(tài)行為是由摩擦學(xué)系統(tǒng)所決定,另考慮了化學(xué)藥劑、射流等,而蠟污垢層物性又受管道尺寸、溫度、壓力、降溫速率、老化時間及膠質(zhì)瀝青質(zhì)等因素影響,因此,對管內(nèi)壁潔凈程度的機(jī)械式除蠟過程而言,合理應(yīng)用高可靠的智能機(jī)器人技術(shù),也是油田和科研機(jī)構(gòu)需要重視的方向。
3.2管內(nèi)機(jī)器人磨損失效的摩擦學(xué)和可靠性問題
近年來,我國對管道機(jī)器人抗磨損設(shè)計的研究主要集中在如何提高部件耐磨損和摩擦可靠性方面。柔軟密封碗主要有丁苯橡膠和聚氨酯等,例如研究納米粒子增強(qiáng)橡膠材料用于管道內(nèi)檢測裝備,在各油田進(jìn)行應(yīng)用;另外,盡管油氣儲運學(xué)科等不同領(lǐng)域開展了清管規(guī)律研究[37],也涉及了一些摩擦力計算的理論公式[38],但僅把清管檢測裝備作為不損壞、整體剛體;從耐磨損設(shè)計出發(fā),檢測器探頭設(shè)計了噴焊碳化鎢硬質(zhì)涂層、氧化鋯陶瓷,從動力學(xué)角度考慮了焊縫凸起、管壁凹坑等具體特征進(jìn)行可靠性研究。
另外,智能內(nèi)檢測器皮碗構(gòu)件橡膠磨損機(jī)理研究近期也有進(jìn)展,研究人員采用改變交聯(lián)網(wǎng)絡(luò)、交聯(lián)程度、納米粒子增強(qiáng)體系等優(yōu)化橡膠制品高耐磨配方[39],結(jié)合商業(yè)摩擦試驗機(jī)、自制摩擦磨損試驗機(jī)、臺架試驗等揭示橡膠磨損微觀機(jī)制;此外,從以前單純的材料磨損性能測試發(fā)展到智能清管器碰撞動力學(xué)分析[40]、運移過程摩擦計算[41]、壓差驅(qū)動皮碗及摩擦過程智能化泄流及優(yōu)化等方面[42],研究者嘗試從多尺度分析來控制橡膠構(gòu)件的磨損和摩擦載荷,進(jìn)而提高內(nèi)檢測器和救援機(jī)器人服役可靠性[43]。
3.3關(guān)于管內(nèi)壁減阻防腐的摩擦學(xué)和可靠性問題
借助多功能管道機(jī)器人在管內(nèi)壁設(shè)計和涂覆不同類型的減阻涂層,在輸送介質(zhì)內(nèi)添加化學(xué)藥劑,降低輸送管道的腐蝕和泵組的能耗,是國內(nèi)外研究的熱點;同時管內(nèi)減阻藥劑需要清管器隔斷驅(qū)動,其運移過程和技術(shù)應(yīng)用是核心難題。中國石油大學(xué)針對中國原油管道面臨的多種物性差異大原油同管輸送的挑戰(zhàn),研究原油加劑改性長距離順序輸送、冷熱油交替輸送、長距離含蠟原油管道間歇輸送過程等減阻增輸工藝,改進(jìn)了原油管道內(nèi)聚合物湍流減阻流動理論,還研制了保障管道安全的多功能管道機(jī)器人;中國石油大學(xué)(北京)基于國家自然科學(xué)基金重點項目《深水環(huán)境下易凝高黏原油-天然氣輸送系統(tǒng)流動保障基礎(chǔ)問題研究》,為提高管內(nèi)過流面積,研究了蠟沉積物清除工藝、清蠟周期和材料微去除率,研制蠟沉積物剝離的模擬試驗臺,提高管內(nèi)壁潔凈度以期減阻增輸。此外,中科院固體潤滑國家重點實驗室等機(jī)構(gòu)研究了多種油品在疏油表面的減阻行為,在管壁制備仿生超疏油(水)表面,總結(jié)出不同功能表面減阻增輸?shù)囊话阋?guī)律。所以,在大規(guī)模的天然氣管網(wǎng)、原油管道等工況,減阻防腐和輸送能耗都是共性問題,設(shè)備安全延壽和節(jié)能降耗更是綠色摩擦學(xué)重要目標(biāo)。
3.4管內(nèi)機(jī)器人可靠性問題和檢測與評定研究
深海立管作業(yè)等智能機(jī)器人質(zhì)量檢測評定是工業(yè)應(yīng)用的一大難題。海洋立管隔離了外部強(qiáng)腐蝕性海水的進(jìn)入,也密封管內(nèi)的高壓多相介質(zhì),避免油氣介質(zhì)泄漏和環(huán)境污染;立管作業(yè)機(jī)器人功能很多,可保障管道安裝、管壁清潔、缺陷檢測、維護(hù)修復(fù)、緊急救援等順利地進(jìn)行,所以其可靠性研究意義重大,但國內(nèi)外的相關(guān)成果較少,涉及機(jī)器人質(zhì)量檢測檢驗的文獻(xiàn)不多。例如,不同管道口徑的智能機(jī)器人涉及不同類型的密封系統(tǒng)、傳感器、控制器、伺服電機(jī)、減速器等,都需要合適的試驗方法和規(guī)程,然而,目前較成熟的電路(或器件)驗證測試[44]、可靠性試驗等,不能完全替代機(jī)器人的性能檢測試驗與評價,應(yīng)進(jìn)一步研究。
各企業(yè)和高校要繼續(xù)深化產(chǎn)學(xué)研合作,共同研究機(jī)器人設(shè)計制造和服役的特殊工況、環(huán)境,聚焦在管道運輸?shù)忍胤N機(jī)器人檢測和評定;同時,注重核心技術(shù)的市場推廣和品牌宣傳,以獨具特色的模式來培育國內(nèi)企業(yè)市場競爭力。另外,在石油、礦山、煉化、電力、冶金等行業(yè),適合于極端環(huán)境下作業(yè)的特種機(jī)器人系統(tǒng),能夠代替人類在海洋、地下、野外及受限空間等復(fù)雜危險環(huán)境下開展各種作業(yè)[45],輔助完成高精度、高穩(wěn)定性、高安全性的復(fù)雜作業(yè)任務(wù),其研究開發(fā)具有極其重要的社會效益,也體現(xiàn)了作業(yè)機(jī)器人摩擦學(xué)與可靠性工作提升產(chǎn)品服役質(zhì)量的研究意義。
4 結(jié)論
1)從摩擦學(xué)與可靠性角度綜述了我國在海洋立管作業(yè)機(jī)器人技術(shù)方面的進(jìn)展和主要問題,未來我國在摩擦學(xué)技術(shù)和可靠性方面應(yīng)加大研究力度。
2)建議由國家和企業(yè)共同建立管道運輸(或水運安全、軌道交通、電網(wǎng)輸送)等特種機(jī)器人產(chǎn)品及部件認(rèn)證、校準(zhǔn)、標(biāo)準(zhǔn)化工作、檢測、技術(shù)咨詢等服務(wù)平臺。
3)通過模擬計算和試驗測試手段,開展管道智能檢測機(jī)器人等機(jī)電耦合設(shè)備的摩擦學(xué)設(shè)計和可靠性設(shè)計,制定相關(guān)可靠性設(shè)計和試驗規(guī)范,在企業(yè)進(jìn)行推廣和有關(guān)認(rèn)證咨詢。
4)加強(qiáng)高端橡塑密封、微型傳感器、高性能液壓件等研發(fā)測試能力,分析其安全節(jié)能服役基礎(chǔ)問題,深化產(chǎn)學(xué)研合作在我國深海油氣資源開發(fā)過程中進(jìn)行新理論和新技術(shù)應(yīng)用。
[1]周守為,金曉劍,曾恒一,等.海洋石油裝備與設(shè)施:支撐起海洋石油工業(yè)的平臺[J].中國工程科學(xué),2010,12(5):102-112.
[2]張嗣偉.關(guān)于摩擦學(xué)的思考[M].北京:清華大學(xué)出版社,2014.
[3]譚桂斌,劉書海,王德國,等.深海立管救援機(jī)器人橡膠密封碗摩擦損傷與微淤積效應(yīng)[C]// 2015年全國摩擦學(xué)大會.成都,2015-10-14.
[4]陳迎春,張仕民,王文明,等.連續(xù)油管在海洋垂直立管中作業(yè)的軸向力傳遞[J].石油礦場機(jī)械,2015,44(5):17-21.
[5]譚桂斌,劉書海,王德國,等.油氣管道腐蝕缺陷內(nèi)檢測與清管時軟接觸區(qū)的含蠟油遷移規(guī)律研究[C]//2014全國青年摩擦學(xué)學(xué)術(shù)會議.湖北宜昌,2014-05-15.
[6]張行,張仕民,郭書墩,等.直板清管器過環(huán)焊縫過程的動力學(xué)仿真[J].石油礦場機(jī)械,2015,44(2):22-27.
[7]王國彪,賴一楠,黃海鴻,等.2011年度NSFC機(jī)械工程學(xué)科工作回顧與思考[J].中國機(jī)械工程,2012,23(5):570-577.
[8]譚桂斌,朱霄霄,張仕民,等.天然氣管道調(diào)速清管器研究進(jìn)展[J].油氣儲運,2011,30(6):411-416.
[9]王德國,何仁洋,董山英.長距離油、氣、水混輸管道內(nèi)壁流動腐蝕的研究進(jìn)展[J].天然氣與石油,2002,20(4):24-29.
[10]Tan G B,Zhang S M,Zhu X X,et al.Research on bypass-valve and its resistance characteristic of speed regulating PIG in gas pipeline[C]//IEEE,3rd Int Conf on Measuring Technology and Mechatronics Automation,2011;Shanghai,China:1114-1117.
[11]Chen Y C,Zhang S M,Yu D H,et al.Friction reduction measurement for a coiled tubing working in a marine riser[J].Measurement,2015( 65):227-232.
[12]Tan G B,Liu S H,Wang D G,et al.Tribological behavior of a line contact between rubber and wax (application to the wax-removal of oil pipeline pigging)[C]//Proceedings of World Tribology Congress (WTC2013),Torino,Italy;Sep 8-13,2013,ID58:01-03.
[13]李鵬,馬書根,李斌,等.具有軸向和周向探查功能的螺旋驅(qū)動管內(nèi)機(jī)器人[J].機(jī)械工程學(xué)報,2010,46(21):19-28.
[14]Tan G B,Liu S H,Wang D G,et al.Effect of elastic rubber on the mechanical scraping of wax-oil deposit in oil and gas pipeline[C]//7th China International Symposium on Tribology (CIST),Xuzhou,China,April 27-30,2014.
[15]張宏.解讀黃島事故調(diào)查報告,落實管道完整性管理[J].油氣儲運,2014,33(11):1171-1173.
[16]孫兆光.管道公司維搶修體系初步形成[N].石油管道報,2006-01-12(1).
[17]Tan G B,Wang D G,Liu S H,et al.Frictional behaviors of rough soft contact on wet and dry pipeline surfaces:With application to deepwater pipelaying[J].Sci China Technol Sci,2013,56(12):3024-3032.
[18]梁富浩,李愛華,苗春生,等.深水海底管線維修方式及其維修程序的探討[J].國外油氣田工程,2009,25(10):43-47.
[19]梁富浩,李愛華,張永祥,等.深水海底管線維修系統(tǒng)研究進(jìn)展及有關(guān)問題探討[J].中國海上油氣,2009,21(5):352-357.
[20]張仕民,譚桂斌,朱霄霄,等.油氣管道維搶修技術(shù)發(fā)展[J].石油機(jī)械,2011,39 (10):174-178.
[21]王瑩瑩,王德國,段夢蘭,等.水下生產(chǎn)系統(tǒng)典型布局形式的適應(yīng)性研究[J].石油機(jī)械,2012,40(4):58-63.
[22]樊文斌.管內(nèi)高壓封堵器封堵能力與密封性能的研究[D].北京:中國石油大學(xué)(北京),2010.
[23]馬明,趙弘,賀滕.基于ADAMS的管內(nèi)封堵器鎖緊機(jī)構(gòu)動力學(xué)研究[J].石油機(jī)械,2014,42(4):101-105.
[24]王文明,張仕民,陳迎春,等.連續(xù)管在海洋油氣作業(yè)中的應(yīng)用[J].石油機(jī)械,2012,40 (11):53-57.
[25]馬明,趙弘,蘇鑫,等.油氣管道封堵?lián)屝藜夹g(shù)發(fā)展現(xiàn)狀與展望[J].石油機(jī)械,2014,42(6):109-112.
[26]張策.管內(nèi)智能封堵器的研究[D].北京:中國石油大學(xué)(北京),2011.
[27]劉華潔,張策,張仕民,等.管內(nèi)高壓智能封堵機(jī)器人[J].石油機(jī)械,2013,41(6):115-118.
[28]Wang W D,Huang Q Y.Prediction for wax deposition in oil pipelines validated by field pigging[J].J Energy Inst,2014,87(3):196-207.
[29]Tan G B,Wang D G,Liu S H,et al.Probing tribological properties of waxy oil in pipeline pigging with fluorescence technique[J].Tribol Int,2014(71):26-37.
[30]Tan G B,Liu S H,Wang D G,et al.Tribological behaviors of wax-in-oil gel deposition in orthogonal cleaning process[J].Tribol Lett,2015,57(3):1-18.
[31]Tan G B,Liu S H,Wang D G,et al.Spatio-temporal structure in wax-oil gel scraping at a soft tribological contact[J].Tribo Int,2015(88):236-251.
[32]Tan G B,Liu S H,Wang D G,et al.In situ observation of wax-in-oil flow in rough soft contact[J].Tribol Lett,2013,52(1):93-103.
[33]譚桂斌,劉書海,王德國,等.軟接觸區(qū)微量油滴的遷移規(guī)律試驗研究[C]//2013年全國青年摩擦學(xué)學(xué)術(shù)會議.山東青島,2013-06-02.
[34]朱霄霄,張仕民,李曉龍,等.可調(diào)速清管器速度控制裝置設(shè)計與研究進(jìn)展[J].油氣儲運,2014,33(9):922-927.
[35]Galta T.Bypass pigging of subsea pipelines suffering wax deposition[D].Norwegian University of Science and Technology,2014.
[36]Zhang J J,Yu B,Li H Y,et al.Advances in rheology and flow assurance studies of waxy crude[J].Petrol Sci,2013,10(4):538-547.
[37]張勁軍,何利民,宮敬,等.油氣儲運理論與技術(shù)進(jìn)展[J].中國石油大學(xué)學(xué)報(自然科學(xué)版),2013,37(5):151-162.
[38]O′Donoghue A.On the steady state motion of conventional pipeline pigs using imcompre- ssible drive media[D].Cranfield:Cranfield University,1996.
[39]曹志強(qiáng).網(wǎng)絡(luò)結(jié)構(gòu)對丁腈橡膠磨損行為的影響及其機(jī)理研究[D].北京:中國石油大學(xué)(北京),2014.
[40]Zhang H,Zhang S M,Liu S H,et al.Measurement and analysis of friction and dynamic characteristics of PIG’s sealing disc passing through girth weld in oil and gas pipeline[J].Measurement,2015(64):112-122.
[41]Zhu X X,Zhang S M,Li X L,et al.Numerical simulation of contact force on bi-directional pig in gas pipeline:At the early stage of pigging[J].J Nat Gas Sci Eng,2015(23):127-138.
[42]朱霄霄.天然氣管道調(diào)速清管器的設(shè)計方法與實驗研究[D].北京:中國石油大學(xué)(北京),2014.
[43]譚桂斌.深海立管救援機(jī)器人的密封系統(tǒng)可靠性分析與設(shè)計[C]// 第四屆模型V&V專題研討會.長沙,2015-12-4.
[44]焦泉,張仕民,李曉龍,等.高精度管道通徑檢測器研制[J].石油礦場機(jī)械,2015,44 (1):63-68.
[45]王國彪,陳殿生,陳科位,等.仿生機(jī)器人研究現(xiàn)狀與發(fā)展趨勢[J].機(jī)械工程學(xué)報,2015,51(13):27-44.
Advances in Tribology and Reliability Studies of In-pipe Robot for Deepwater Risers
TAN Guibin1,2,3,WANG Deguo3,CHEN Yingchun3
(1.National Engineering Research Center of Rubber & Plastic Sealing,GuangzhouMechanical Engineering Research Institute Co.,Ltd.,Guangzhou 510535,China;2.State Center of Robot Testing and Evaluation (Guangzhou),Guangzhou 510535,China;3.College of Mechanical and Transportation Engineering,China University of Petroleum,Beijing 102249,China)
There are still huge gaps in our pipe-robots for oil & gas pipeline and its flow assurance;a better understanding of the researches in Europeans and Americans is needed.Large diameter,high pressure,long distance pipelines are being used in China in last decade (from 2004 to 2014),these in-pipe robots applications get more and more attentions and the world was shocked by its practical applications,such as pipe-laying,wax pigging,inspecting,isolating,repairing and so on.The main tribology and reliability problems of in-pipe robot are summarized and analyzed.Based on this,a discussion on green tribology,flow assurance,safe and efficiency,testing and evaluate of the various pipe-robots is carried out.Some open problems are discussed and the future trends are provided.
offshore platform;standpipe;robot;reliability
1001-3482(2016)05-0088-08
2015-11-04
2015工信部強(qiáng)基工程“高端橡塑密封元件研發(fā)檢測服務(wù)平臺”;國家自然科學(xué)基金面上項目“特殊環(huán)境下橡膠材料非穩(wěn)態(tài)摩擦學(xué)研究”(51375495);國家自然科學(xué)基金面上項目“油氣管道清管過程中軟摩擦的行為與作用機(jī)制研究”(51175514);中央高校基本科研業(yè)務(wù)費專項基金“含蠟油在機(jī)械裝備柔軟接觸區(qū)的遷移規(guī)律研究”(2462013YXBS008)
譚桂斌(1988-),男,湖南郴州人,工學(xué)博士,主要研究方向為深海智能裝備、機(jī)器人與可靠性等,E-mail:tgb0510@126.com。
TE952
A
10.3969/j.issn.1001-3482.2016.05.020
猜你喜歡
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計與研究(2019年4期)2019-05-21 07:21:24
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12