柬埔寨達岱電廠基于自適應控制策略的調速器系統分析
2016-09-06 07:14:22潘道明
電氣技術 2016年7期
關鍵詞:系統
潘道明
(湖北清江水電開發有限責任公司達岱項目部,柬埔寨戈公省)
柬埔寨達岱電廠基于自適應控制策略的調速器系統分析
潘道明
(湖北清江水電開發有限責任公司達岱項目部,柬埔寨戈公省)
通過長距離壓力隧洞引水的水輪發電機組,往往具有較大的水力時間常數,在引水隧洞后半段設置調壓井是減小水力時間常數的方法。在高水頭的水電站中,機組在甩負荷時,必然會引起轉速和蝸殼壓力超過標準規定值,調節導葉關閉規律可以改善轉速和蝸殼壓力上升率,也是一種最直接、最經濟的方法。調速器針對不同的工況,選擇最優的PID參數,就能提高機組的動態性能,文中還詳細敘述了自適應控制策略和操作方法。
調速器;自適應;水錘效應;導葉分段關閉;參數優化
柬埔寨達岱電廠位于柬埔寨戈公省境內,電廠裝機容量246MW,安裝3臺82MW的混流式水輪發電機組,設計年發電量8.49億kW·h。機組采用一管三岔引水隧洞方式,引水隧洞全長9982.414m,在引水隧洞末端設置有調壓井。水錘效應是影響水輪機調速器調節的一個重要因素,調速器不同關閉規律對調節系統性能有著重要影響,改變導葉分段關閉規律是解決水電站甩負荷時壓力鋼管壓力上升率和混流式水輪機組轉速上升率矛盾的重要措施[1]。
目前水輪機調速器的控制基本還是PID控制系統,PID參數的設置往往只是在機組投運時,通過現場調試結合經驗公式設置一組參數[2],當機組的工況改變時,固定參數的PID控制很難滿足現代電力系統的需求[3]。變參數變結構的調速器通過判斷機組的不同工況,相應改變PID參數,使系統性能達到最優。文中探討了調速器自動適應工況的變參數變結構控制策略,以及實現變參數調結構的方法。發電機參數如下:
單臺發電機容量:P=82MW;
額定水頭:HP=188m;
額定轉速:n=375r/min;
飛逸轉速:nr=650r/min;
轉輪直徑:D=2.5m;
發電機轉動慣量:GD2=1800t·m2;
調速器型號:SAFR-2000H。
1 調速器結構分析
傳統的調速器系統參數主要是以PID結構作為基本結構,而調速器的PID參數通過理論計算給出參數范圍,再經過現場調試,找到最優的參數,以作為機組運行的最佳參數。一般調速器只有一組固定的PID參數,不能根據不同的工況來調節參數,傳統的PID傳遞函數如圖1所示。
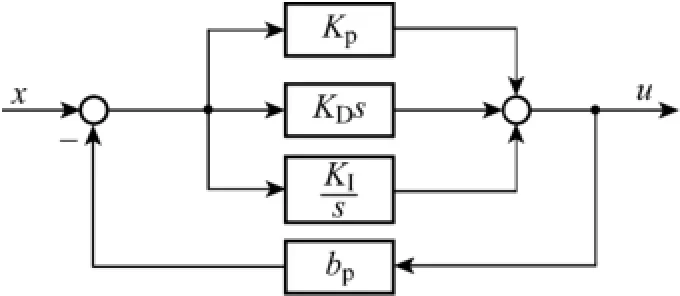
圖1 傳統PID傳遞函數方框圖
由圖1可以求出調速器PID傳遞函數如下:

達岱電廠的調速系統型號為SAFR-2000H,對系統結構進行了一定改進,將傳統的永態轉差系數的輸入由PID綜合輸出,改為由積分環節輸出,稱為改進型PID結構。同時,還在結構上單獨將導葉反饋單獨成立一個閉環,稱為副環,而PID環節稱為主環。即頻率環為主環,導葉環為副環,其結構如圖2所示[4]。
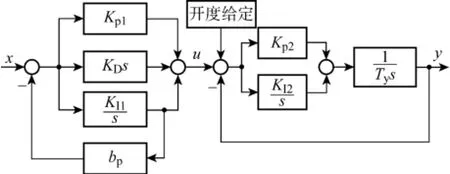
圖2 SAFR-2000H調速器改進型系統結構圖
由圖2可以求出調速器的主環的PID傳遞函數如下:

比較式(1)和式(2)兩個傳遞函數,可以發現式(2)的傳遞函數的分子與式(1)的相同,則傳遞函數的零點相同,而分母則少了一階,也就是改進型PID結構在傳遞函數上比傳統PID傳遞函數少了一個極點。-bpKI為主導閉環極點,主導閉環極點對系統的動態性能具有主導作用[5],效果要優于傳統的閉環極點,這使得改進型PID結構擁有更好的調節性能,穩定域也更寬。在Matlab中對兩個傳遞函數做階躍響應仿真,響應圖形如圖3所示。
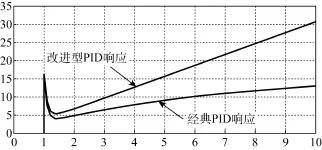
圖3 系統階躍響應圖調速器的運行方式主要有:頻率方式、開度方式和功率方式,由于功率閉環已經在監控系統中實現,在調速器本身就取消了功率閉環方式,所以,調速器正常運行時,只有頻率方式和開度方式。在機組并網前采用頻率方式,機組頻率跟蹤電網頻率;機組并網之后采用開度方式,機組開度維持在給定開度。
2 系統分析
2.1水利因素分析
水利因素是影響機組穩定的一個重要因素,通過分析水利因素的大小來確定對機組運行的影響。電廠采用長距離隧洞引水方式,在引水隧洞后半段設置有溢流式調壓井,壓力鋼管末端設計為“一主三岔”方式,三路支管分別對應三臺機組,引水隧洞結構圖如圖4所示。
計算水力時間常數TW。

式中,TW為水力時間常數;LV∑為調壓井后引水隧洞的每段長度與水的流速的乘積之和,4341m2/s[6];g為重力加速度,9.81m/s2;HP為設計水頭,188m。
由于水力時間常數計算值小于2.5s,在標準范圍之內,機組可以正常運行。
2.2過渡過程分析
機組的過渡過程是指水力機組由一種穩定工況或狀態轉換到另一工況或狀態的瞬時或短時間的變動過程[7]。引起機組過渡過程的原因主要有:增減負荷,電力系統振蕩等。機組的過渡過程會導致水錘的變化,將水錘的變化率控制在一定安全范圍之內,這就需要對系統進行理論計算,從而找到合適的解決方法。下面對電廠的機組過渡過程進行理論分析。
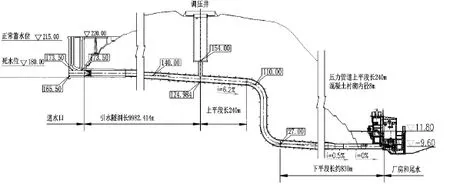
圖4 引水隧洞結構圖
機組甩負荷時,導葉快速關閉,加劇蝸殼末端的水錘效應,在較大的水流力矩的情況下,發電機的轉速會急速升高,而機組轉速的升高必然會威脅到機組及水工建筑物的安全,所以,必須將機組轉速的上升率控制在安全的范圍之內。
以下對系統參數進行計算[8]
壓力鋼管的平均流速

式中,Q為壓力鋼管設計流量,147.4m3/s;D為壓力鋼管直徑,8m。
壓力鋼管常數

式中,a為水壓波在壓力鋼管中的傳播速度,取1000m/s;H為額定水頭,188m。
由于ρτ<1(τ為導葉開度大小,取100%),故該水錘類型為首相水錘。
壓力鋼管的特征系數

式中,LV∑為壓力鋼管長度與平均流速的乘積,取4341m2/s;sT′為接力器直線關閉規律運動所需時間,取8s。
水錘波往返時間

式中,L為從調壓井到最遠機組1號機進水蝶閥距離,1179.68m。
水錘波從調壓井到機組往返的次數

在管導葉過程中水錘波從機組到調壓井有三次回波。
機組甩負荷后機組轉速上升計算
由摩根史密斯化簡公式可得

式中,N為水輪機出力,82000kW;GD2為發電機轉動慣量,1800t·m2;n為發電機額定轉速,375r/min。
考慮效率下降修正系數
式中,nk為發電機飛逸轉速,650r/min。
由上式計算可知,水錘類型為間接首相水錘,則水壓上升率

考慮水擊的修正系數

則轉速上升率可以計算

由上式的計算可知,三臺機組同時甩額定負荷時,機組的轉速上升了53.3%,水錘壓力上升了39.3%,超過了標準要求(標準要求β<0.5)。以上計算是基于導葉一段關閉規律計算的,而導葉采用兩段關閉規律可以對壓力升高ξp和轉速升高β 進行相對調整[9],將導葉關閉時間sT′由8s,調整為15.8s,如圖5所示。
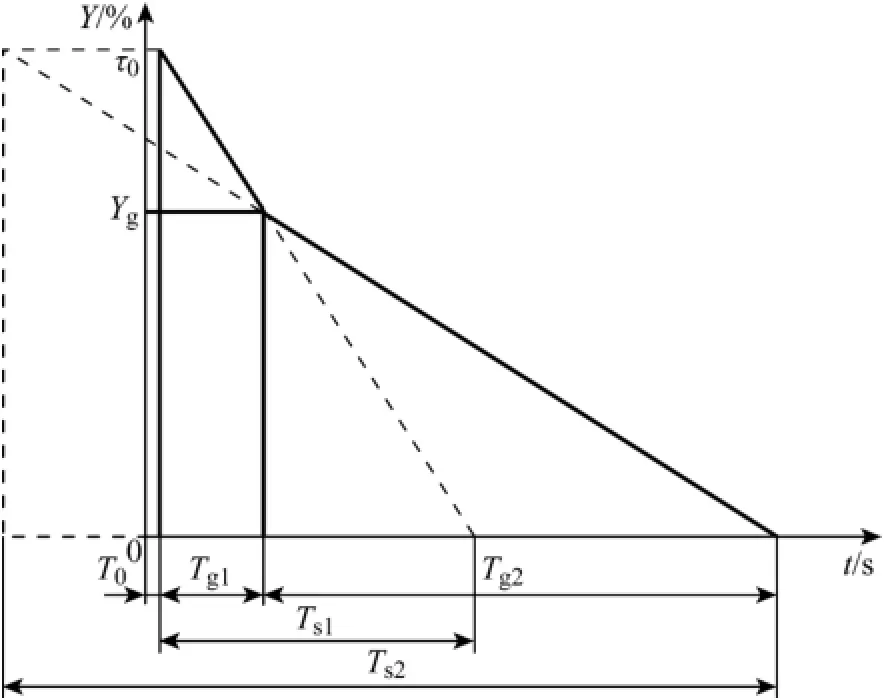
圖5 導葉兩段關閉規律
圖5中,T0為導葉不動時間:T0=0.2s;τ0為甩負荷時對應的導葉開度;Yg為導葉分段關閉的拐點:Yg=65%Ymax;Tg1為第一段關閉時間:Tg1=2.8s,TS1=8s;Tg2為第二段關閉時間:Tg2=13s,Ts2=20s。
經過調整導葉關閉規律之后,重新用式(4)至式(13)式對參數進行計算,計算結果見表1。
對單臺機組進行了甩100%負荷試驗(不具備三臺機同時甩額定負荷條件),機組的轉速上升了35.4%,與計算結果結果接近(試驗水頭低于額定水頭),如圖6所示。

圖6 單臺機組甩100%負荷曲線

表1 機組甩負荷參數計算
3 自適應控制方法
目前,調速器控制系統都實現了微機化和網絡化,所有的PID運算都能在計算機中進行,調速器有幾種不同的運行工況,不同的參數和結構又對機組的動態性能有很大的影響[1],所以要讓系統達到性能最優化,必須要根據不同的工況調整系統的參數和結構[10]。
調速器系統運行的工況主要有:開機、空載、發電、停機和手動。每種工況的參數設置都不相同,下面對各個工況進行分析。
3.1開機
調速器接收到監控系統的開機令后,在10s之內將頻率給定值設定為50Hz,參數為空載PID參數,人工失靈區為0,永態轉差系數為0,電氣開限為空載開限加10%。在整個開機過程中,系統一直跟蹤機組頻率,采用多段導葉開度控制方法,如圖7所示。
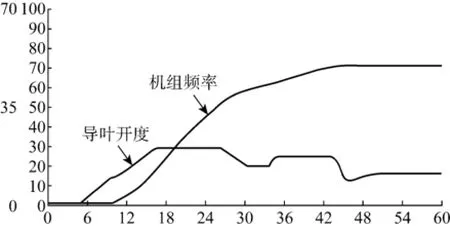
圖7 開機過程曲線
由圖7可以看出,機組開機過程,采用了多段導葉控制方法,轉速上升平穩,無沖擊現象。在控制的每個拐點都以機組轉速為標準,該方法能有效縮短開機時間,滿足快速并網的要求,又可減小超調量。
3.2空載
在開機完成,轉速達到95%以后或機組出口開關斷開之后,發電機進入空載狀態,參數為空載PID參數,人工失靈區為0,永態轉差系數為0,電氣開限為空載開限加10%。機組轉速=網頻+滑差,自動跟蹤電網頻率。
3.3發電
發電機出口開關合閘之后,機組進入發電態,頻率給定值為50Hz,參數為發電PID參數,人工失靈區和永態轉差系數為設定值。
3.4停機
調速器收到停機令后,系統直接將開度給定值設為0,導葉迅速關閉,直到轉速為0。
3.5手動
調速器切到手動狀態時,調速器處于開度模式,反饋信號只有導葉開度,調速器只跟蹤當前的導葉開度。
針對以上5種不同的工況,調速器參數優化前會選擇一組經驗PID參數,在現場進行靜態和動態調試時,根據試驗數據來逐步優化相關參數,參數優化流程如圖8所示。
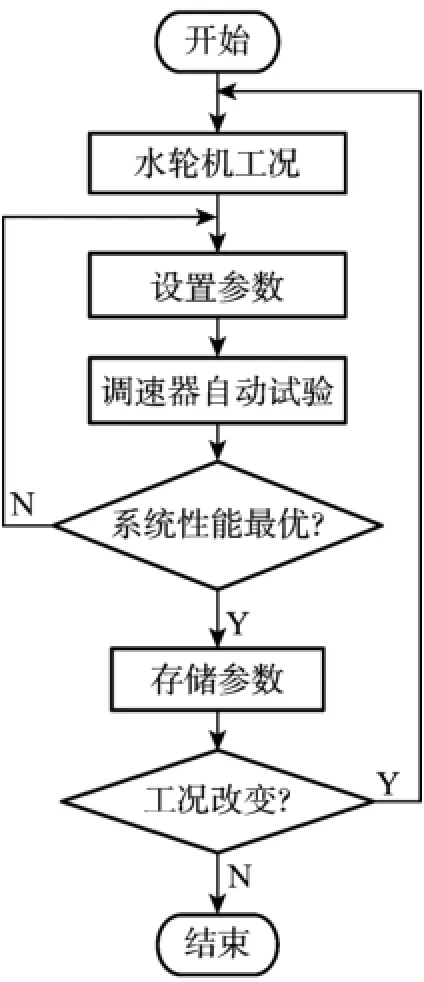
圖8 參數優化流程圖
選定一組最優參數,并將其保存到PLC的寄存器中,最后通過做擾動試驗檢驗參數的最優性,見表2。
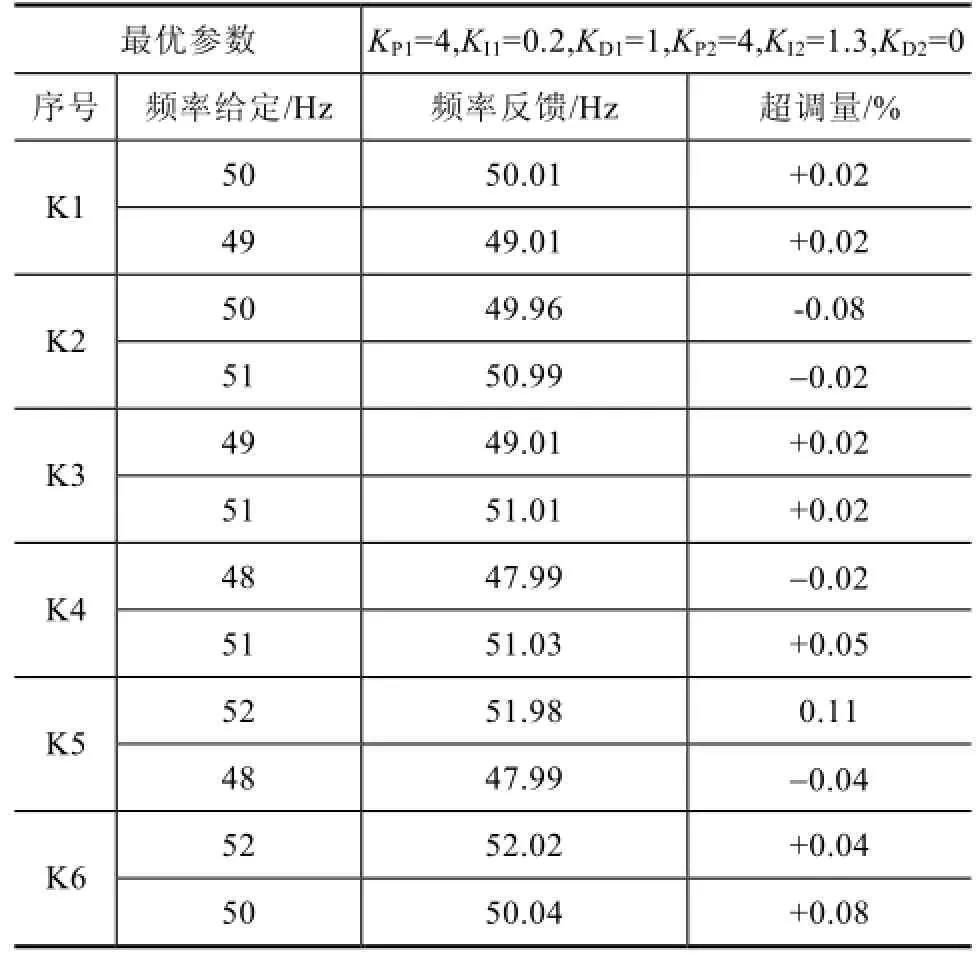
表2 空載擾動試驗檢驗參數最優性
從表2的試驗數據可以看出,最終優化的參數超調量很小,完全能滿足系統運行需求。再通過對機組開機運行來檢驗在各個工況下系統性能,如圖9所示,即為機組開機、停機及并網各個工況切換的過程。
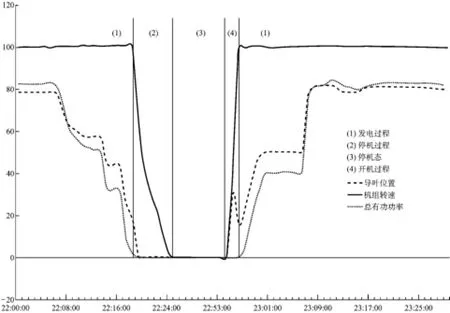
圖9 機組工況切換過程
圖9中包括了發電機組所有的運行工況,分別為:工況(1)發電態;工況(2)停機過程;工況(3)停機態;工況(4)開機過程,其中開機過程和停機過程都包括了空載態。在幾個工況轉換的過程中未發生突變情況,系統響應速度快,而超調量又非常小,系統性能達到了最優化。
在調速器運行過程中,經常會遇到某個測量元器件故障的情況,一旦發生此種情況,必須將故障信號切除,這就是該型號的調速器具有的適應式變結構特點,在系統中配置了容錯策略。所謂適應式變結構算法就是通過改變系統的結構來提高系統可靠性和提高調解品質[4]。所以調速器在遇到故障信號時,會自動將故障信號回路切除。
如:頻率反饋總共有三路信號,即殘壓測頻、齒盤測頻和系統頻率。在系統中的優先級依次由高到低,當殘壓測頻故障時,調速器自動切換到齒盤測頻,依次類推。當一路測頻回路出現故障時,調速器會自動改變主環結構,選擇正常的測頻信號替代故障的測頻信號,這樣就不會影響整個系統的運行,有效提高了系統的可靠性。
4 結論
水輪機調節系統是一個閉環自動調節系統[11],系統的過渡過程容易受到水錘效應的影響,改變導葉關閉規律能夠調節轉速和水壓的上升率,這也是最有效最經濟解決的途徑[1]。經過實測數據分析,柬埔寨達岱電廠在調整導葉關閉規律之后,轉速上升率和水壓上升率得到了有效控制,可以滿足實際運行要求。改進型調速器系統突出了積分環節作用,有利于改善系統的動態性能,提高了系統的穩定域度。
由于柬埔寨國家電網的容量小,負荷不穩定,經常出現低頻振蕩現象,SAFR-2000H型調速器能自動適應當前工況,調取最優的參數配置,達到系統性能的最優化,在電廠并網運行之后,達岱電廠承擔了柬埔寨電網的大量負荷,到目前為止,調速器已經連續滿負荷不間斷運行半年,據初步統計,電網的低頻振蕩次數與2014年相比有明顯減小,穩定性有了很大提高,自動適應式調速器系統為穩定柬埔寨國家電網起到了至關重要的作用。
[1] 高仝. 南美水電站導葉分段關閉的調節保證計算[J].小水電, 2008(5): 21-24.
[2] 曹程杰, 莫岳平. 基于現代智能控制技術的水輪機自適應工況PID調速器研究[J]. 電力系統保護與控制, 2010, 38(3): 81-85, 94.
[3] 于波, 肖惠民. 水輪機原理與運行[M]. 北京: 中國電力出版社, 2008.
[4] 南京南瑞集團公司水利水電技術分公司. 微機水輪機調速器培訓教材[Z]. 3版, 2011.
[5] 胡壽松. 自動控制原理[M]. 3版. 北京: 科學出版社,2010.
[6] 達岱水電站工程可行性研究報告[Z].
[7] 鄭源, 張健. 水力機組過渡過程[M]. 北京: 北京大學出版社, 2008.
[8] 周泰經, 吳應文. 水輪機調速器實用技術[M]. 北京:中國水利水電出版社, 2010.
[9] 趙鎖明, 馮素金. 水輪機導水葉采用兩段關閉的調節保證計算[J]. 青海水力發電, 2001(4): 55-56.
[10] 葉魯卿, 魏守平, 等. 水輪發電機組變參數變結構控制[J]. 華中理工大學學報, 1989, 17(3): 89-96.
[11] 魏守平, 羅萍, 張富強. 水輪機調節系統的適應式變參數控制[J]. 水電能源科學, 2003, 21(1): 64-67.
The Governor Systems Analysis based on Adaptive Control Strategy in DadaiHydropower Station of Cambodia
Pan Daoming
(Dadai Project Department of Hubei Qingjiang Hydropower Development Co., Ltd,KohKong Province. Cambodia)
Over longpressure tunneldiversion, the hydro-generating unittend to have a largerhydraulic time constant, setting surge shaft in the second half of diversion tunnel is the method to reduce the hydraulic time constant. Inhighwater headhydropower station, generator load rejecting,inevitably leads to speed and volute pressure exceeds the standard value, adjusting the guide vanes closing regularity can improve the speed and volute pressure rising rate, it is one of the most direct and most economical way. Governor according todifferent operating conditions, selects the optimum PID parameters, can improve the dynamic performance of the unit.,the paper details the adaptive control strategies and methods of operation.
governor; adaptive; water hammer effect; vane segment closed; parameter optimization
潘道明(1978-),男,廣西永福縣人,碩士研究生,高級工程師,主要從事水電站自動化控制系統維護工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
