基于定向天線信號強差的定位方法
2016-09-08 10:31:05李新春
計算機應用與軟件 2016年8期
李新春 蘭 根
(遼寧工程技術大學電子與信息工程學院 遼寧 葫蘆島 125105)
?
基于定向天線信號強差的定位方法
李新春蘭根
(遼寧工程技術大學電子與信息工程學院遼寧 葫蘆島 125105)
針對基于定向天線定位方法的定位實時性和定位精度問題,提出一種基于定向天線信號強差(LRD)的室內(nèi)無線定位方法。利用帶有兩個相互垂直定向天線的節(jié)點作為參考節(jié)點,定向天線在所覆蓋區(qū)域距離不變時角度變量與信號強度近似滿足拋物函數(shù)關系。而目標節(jié)點所獲得的兩參考定向信號強度差值,距離不變時角度變量與信號強差近似滿足線性關系。目標節(jié)點通過兩種函數(shù)關系實現(xiàn)自身定位,并且提出最大密度(LD)的方法對定位結果進行改進。實驗結果表明,該方法不僅能快速對目標進行定位而且具有較高的定位精度。
定向天線信號強度差定位最大密度
0 引 言
節(jié)點定位是無線傳感器網(wǎng)絡(WSN)的關鍵核心支撐技術之一[1]。未知節(jié)點通過與少量已知位置信息的參考節(jié)點進行通信從而估算自身的位置。近年來,WSN定位方法研究也取得了大量研究成果。
目前,無線傳感網(wǎng)絡的定位技術主要有測距和非測距兩類定位[2]。基于非測距的定位算法包括質心算法、DV-Hop算法、指紋算法等[3],這些算法無需額外硬件支持。基于測距的定位算法主要有到達時間(TOA)、接收信號強度(RSSI)和到達角度(AOA)等。在現(xiàn)今大部分無線傳感網(wǎng)絡定位方法研究中所使用的傳感器節(jié)點和參考節(jié)點均采用普通全向天線[4-8],但基于定向天線的定位研究不多[9-13]。定向天線能有效避免多徑效應的干擾,有助于提高定位精度。如董振中等[9]提出了一種基于定向天線無需測距的分布式定位算法,未知節(jié)點利用定向天線確定鄰居節(jié)點之間的相對位置,在算法仿真中取得了較好的定位精度;Chia[10]研究了利用4個配備定向天線的參考節(jié)點,實現(xiàn)了無需測距的定位方法,降低了特定范圍內(nèi)傳感器的硬件要求,并減少了參考節(jié)點傳輸范圍內(nèi)和感測環(huán)境中存在的障礙變化影響,但定位耗時長。值得一提的是,RAL[14]和EDOA[15]這兩種定位方法以及文獻[16]中的定位方法,都是利用定向天線的信號強度分布特性來確定信號到達的方向信息。根據(jù)天線的旋轉來獲得信號的最大強度值,出現(xiàn)最大值的同時也就估算出節(jié)點相對于參考節(jié)點所處的位置方向。三種方法原理簡單,無需測距,定位效果也好。但RAL方法和文獻[16]中的方法均需要時間旋轉定向天線,而EDOA方法也需要耗時旋轉反射拋物面,都只是針對靜態(tài)的網(wǎng)絡節(jié)點,不能對網(wǎng)絡中的動態(tài)節(jié)點進行實時定位。
為解決以上基于定向天線定位系統(tǒng)的定位實時性問題,本文將指紋算法與定向天線相結合,提出一種基于定向天線信號強差的定位方法(LRD)。通過比較捕獲安裝在同一參考節(jié)點上的兩相互垂直定向天線的信號強度,可以在極短的時間內(nèi)確定自身相對于參考節(jié)點的方位。由已知的參考節(jié)點位置和所確定的方位信息就可以快速和準確地對待測節(jié)點進行定位估算。
1 信號強差算法描述
1.1算法原理
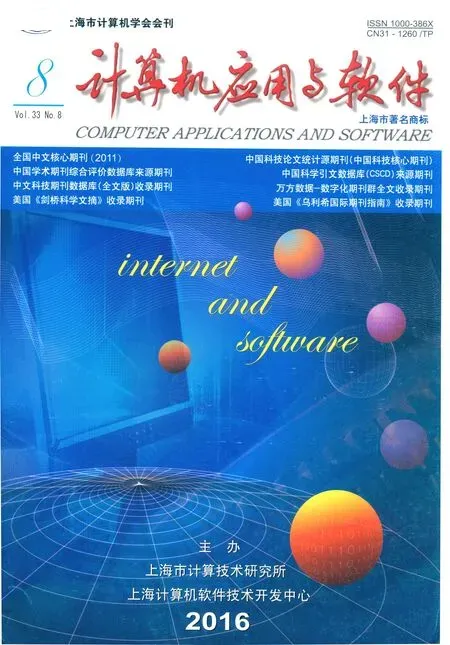
如圖1所示,信號發(fā)出節(jié)點為參考節(jié)點,遠端黑色節(jié)點為待測節(jié)點。本文參考節(jié)點由兩個普通節(jié)點組成,每個節(jié)點裝有一塊相同型號的定向天線,且參考節(jié)點上的兩塊定向天線相互垂直(構成垂直天線和水平天線)。定義待測節(jié)點到參考節(jié)點之間的連線與參考節(jié)點的定向天線軸線夾角為方位角,如果待測節(jié)點與水平定向天線的方位角大小是α,那么與垂直定向天線的方位角就是90°-α。
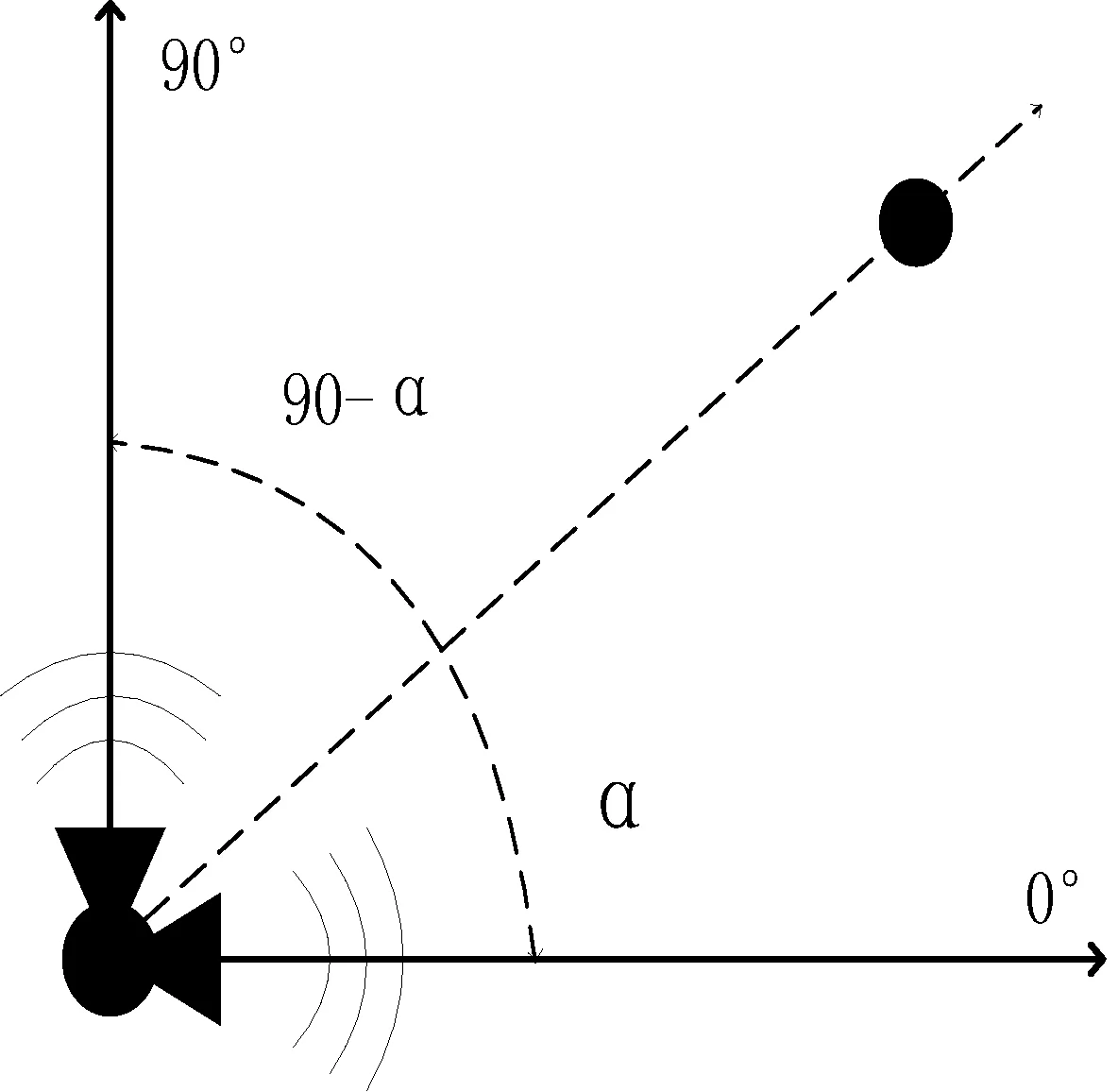
圖1 目標節(jié)點與參考節(jié)點兩垂直天線的方向夾角
定向天線在水平方向圖上表現(xiàn)為一定角度范圍的電磁輻射(類似倒立不完整的圓錐),也就是所說的方向性。其主要參數(shù)為波束角,波束角是天線發(fā)射波束的張角[17],即以定向天線中軸線的延長線為軸線,由此向外至能量減少一半時的角度。顯然,與天線中軸線夾角越小,接收信號強度越強;反之,與中軸線夾角越大,信號強度越弱。從理論上說,定向天線的電磁輻射范圍內(nèi)的信號強度大小變化規(guī)律是由天線的中軸線向兩邊遠離中軸線的方向呈遞減分布,而且由于定向線的結構對稱性可知,在無明顯障礙物的情況下,天線軸線兩邊的信號強度分布是接近對稱的。
如圖2所示,對單個、可旋轉的定向天線信號強度分布規(guī)律進行測試(測試環(huán)境是室內(nèi)籃球場)。定向天線軸線方向和坐標系橫軸正方向一致,在距天線分別為1、5、10 m的位置擺放測量節(jié)點;定向天線從0°逆時針每旋轉一度,測量點觀測接收信號的強度值,直到旋轉90°,得到0°到90°的測量值。同樣地,從0°順時針旋轉90°得到-90°度到0°的觀測值。考慮到實際的信號采集復雜程度,在滿足定位需求的同時,我們也可以將測量的間隔設為2°,使工作量減半。
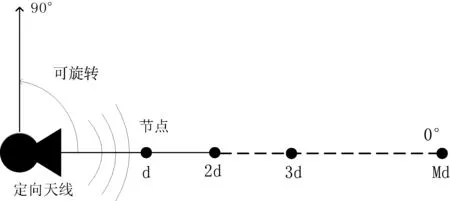
圖2 信號采集圖
信號強度值隨方位角度的變化分布如圖3所示,圖中每個角度的信號強度數(shù)據(jù)都是10次測量值的平均值。由圖3可見,定向天線的中軸線方向測得的信號強度達到最大;距離不變時信號強度的大小隨著與中軸線夾角的增大而遞減,呈曲線分布,分布曲線以定向天線中軸線為軸兩邊近似對稱分布。通過回歸分析,當待測節(jié)點與參考節(jié)點的距離一定時,接收的信號強度值與方位角可以近似二次拋物函數(shù)關系。
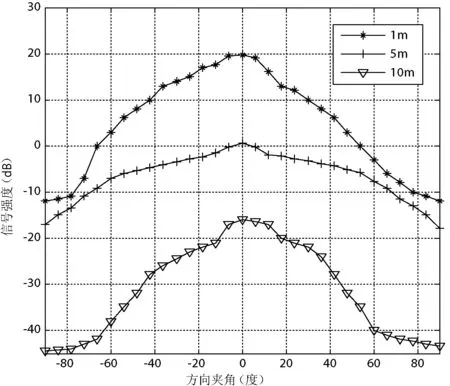
圖3 距離不變時定向天線的信號強度分布
其次,如圖1所示,系統(tǒng)中的參考節(jié)點配有兩個相互垂直定向天線。由于參考節(jié)點結構的特殊性,待測節(jié)點所接收的水平天線與垂直天線的信強差值在0°~45°與45°~90°范圍內(nèi)近似以點(0,45°)為對稱中心對稱分布,如圖4所示。通過線性分析,信強差值與方位角近似滿足線性關系。
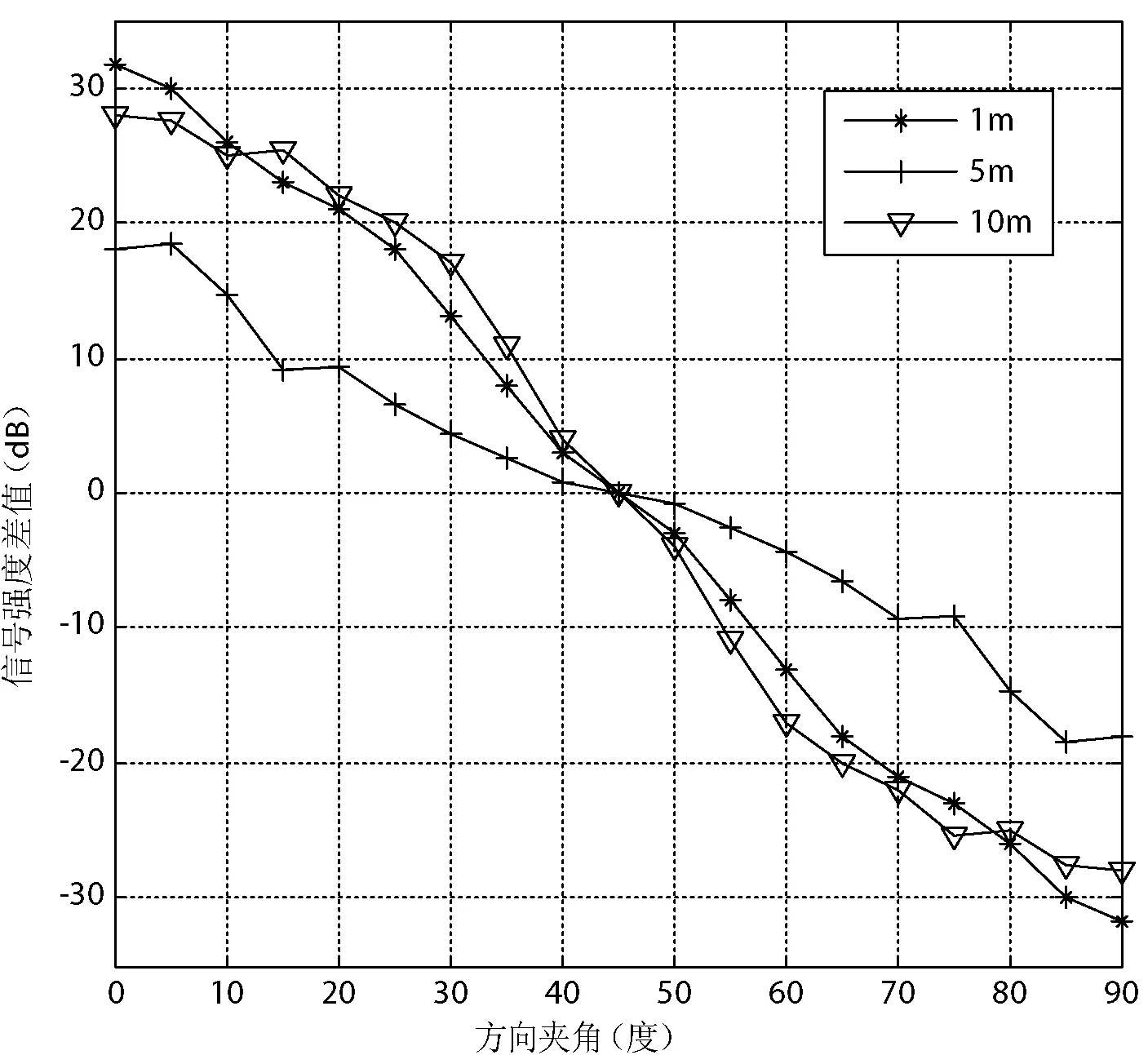
圖4 距離不變時接收信號強度差值分布
根據(jù)定向天線所特有的信號強度分布規(guī)律,可以將距天線一定距離,方位角度范圍在0°到90°內(nèi)所接收的信號強度變化擬合成二次拋物函數(shù)。同時距離一定時可將待測節(jié)點所捕獲的參考節(jié)點的兩定向天線的信號強度差值與角度擬合成線性函數(shù)。根據(jù)信號強度的二次拋物函數(shù)和差值線性函數(shù),就可以由待測節(jié)點接收兩個參考節(jié)點(已知坐標)的信號強度數(shù)值來快速地對自身進行定位。
1.2定位過程
介紹完算法基本原理,下面講述定位的過程,包括離線建庫階段和在線定位階段。
1.2.1離線建庫
本文將指紋定位與定向天線相結合,如同指紋定位算法一樣,定位進行之前需要生成內(nèi)容為函數(shù)的指紋庫。在定位之前需要采集一定量的數(shù)據(jù),分析所得數(shù)據(jù)生成對應的函數(shù)關系。所有的函數(shù)關系組成函數(shù)庫,函數(shù)庫生成后下載到每個待測節(jié)點,完成離線建庫。為保證函數(shù)庫的準確性,系統(tǒng)環(huán)境變換后需重新對函數(shù)庫進行更新。
以下是具體的離線建庫步驟:
(1) 采集信號強度值:如圖2所示,參考節(jié)點上裝有一個可旋轉的定向天線,從x軸正方向逆時針向y軸旋轉,每旋轉一度同時向測量節(jié)點發(fā)送帶有旋轉方位角α的信號。接收節(jié)點放置在x軸正向距定向天線距離d,2d,…,Md處接收參考節(jié)點的信號,一個點采集多次數(shù)據(jù),這里定義d=1m,M=10。接收到的信號強度值被平均后用Gkd(α)表示,其中k=1,2,…,M;α=0°,1°,…,90°。
(2) 進行二次回歸:對于每個距離kd的Gkd(α),進行二次回歸分析,將信號強度值隨方位角α的變化近似地擬合成二次拋物函數(shù)Gkd(α)。
(3) 計算信號強度差值:對于每個距離kd,定義信號強度差:Dkd(α)=Gkd(α)-Gkd(90-α)。Dkd(α)值就是在方位角為α、距離為kd時,參考節(jié)點的水平天線和垂直天線在接收節(jié)點處的信強差。
(4) 進行線性回歸:對于每個kd,通過線性回歸分析,將信強差Dkd(α)隨方位角α變化擬合成線性函數(shù)Lkd(α)。
(5) 存儲函數(shù):將所生成的二次拋物和線性擬合函數(shù)下載到待測節(jié)點,離線建庫完成。
1.2.2在線定位
建庫完成后,下一步進入在線定位階段。本文定位原理如圖5所示,參考節(jié)點信號覆蓋的范圍區(qū)域內(nèi)隨機分布著一定數(shù)量的待測節(jié)點,待測節(jié)點接收到參考節(jié)點信號后,利用離線階段生成的函數(shù)庫求取待測節(jié)點相對參考節(jié)點的方位角α和φ。根據(jù)已知參考節(jié)點B1與B2的坐標位置,就可以直接求出節(jié)點自身在網(wǎng)絡中的坐標位置,實現(xiàn)定位。
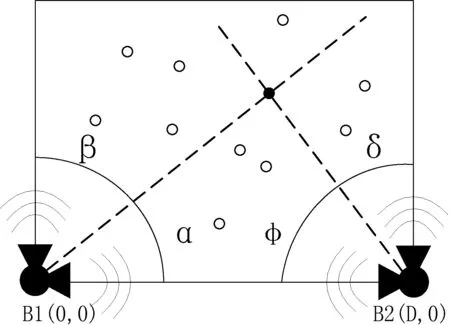
圖5 系統(tǒng)定位原理圖
考慮到離線建庫階段是測量單點參考信號而生成的函數(shù)庫,當進入在線定位階段時是同時測量四個定向天線的信號。當多個定向信號同步發(fā)射時,測量值可能是多個天線信號的疊加,與真實信號強度偏離而不再適應離線階段生成的函數(shù)模型,這樣會增大定位誤差。所以,在在線定位階段盡量保證四個定向信號處于信號的非同步發(fā)射狀態(tài),避免信號強度的疊加,與單點信號采集分析模型相匹配。
以下是定位步驟:
(1) 接收參考節(jié)點信號:首先待測節(jié)點必須采集到參考節(jié)點B1所發(fā)出的水平信號強度R1v和垂直信號強度R1h,以及參考節(jié)點B2發(fā)出的R2h和R2v。
(2) 估算距離:對于每一個距離kd(k=1,2,…,M),都存在待測節(jié)點與參考節(jié)點B1的水平天線和垂直天線形成的兩個方位角αkd和βkd。求Qkd(·)的反函數(shù)Qkd-1(·),則水平天線方位角αkd=Qkd-1(R1h),與垂直天線方位夾角βkd=Qkd-1(R1v)(αkd,βkd∈[0°,90°])。由圖1可知,αkd與βkd滿足關系: αkd+βkd=90°。所以可以將信號值R1h和R1v代入不同kd的函數(shù)關系式使得上一關系式最接近成立,來估算出待測節(jié)點與B1的距離,將所得距離設為kd1。與B1一樣,待測節(jié)點與B2所對應的距離為kd2。
(3) 估算方位角:由上一步所求的距離kd1,推算出線性函數(shù)Lkd1(·),Lkd1(·)取反函數(shù)得到Lkd1-1(.),所以αkd1=Lkd1-1(R1h-R1v)。同樣由所求的kd2可知φkd2=Lkd2-1(R2h-R2v)。
(4) 定位計算:求得待測節(jié)點與參考節(jié)點B1、B2水平定向天線的夾角分別為αkd1和φkd2后,已知B1(0,0),B2(D,0),就可以計算待測節(jié)點的位置坐標,定位坐標如下:
(1)
其中D是B1與B2之間的距離。在這說明一下,也可以用所求的kd1和kd2來求解節(jié)點的位置。但是計算比較發(fā)現(xiàn),用方位角αkd1和φkd2的計算結果的精確度更高,這也就是為什么用的是角度計算而不是距離。
2 實驗結果
2.1實驗設備介紹
在硬件方面,本文定位選用的節(jié)點設備是Moteiv BAT mote節(jié)點,帶有8 MHz Texas Instruments MSP430微處理器(10 k RAM,48 k Flash)和傳輸速率250 kbps,頻率為2.4 GHz的ChipconCC2420無線收發(fā)器,內(nèi)置全向天線,最大傳輸室內(nèi)范圍50 m,室外125 m。在軟件方面采用一種開源的嵌入式操作系統(tǒng)——TinyOS作為平臺并且用nesC編程語言來實現(xiàn)。
實驗過程中用于信號強度的采集與分析的可旋轉參考節(jié)點裝有一塊Maxim AP-12平板天線,并且可以在步進電機的作用下實現(xiàn)旋轉。計算機可以同時控制電機和節(jié)點,這樣由傳感節(jié)點、步進電機、定向天線和計算機共同構建了信號采集實驗的參考節(jié)點。定位實驗中用于定位的參考節(jié)點裝有兩塊相互垂直的Maxim AP-12平板天線,平板天線的水平與垂直的波束寬度分別為65°和28°。
考慮實驗場地的便利性,選擇了在10 m×10 m的室內(nèi)的籃球場區(qū)域進行實驗。如圖6所示,兩個參考節(jié)點分別放置在方形區(qū)域的底端直角位置,在定位區(qū)域部分網(wǎng)格交點處設置了25個測量點,定位點的編號是呈漩渦分布(考慮到定位誤差大小的分布)。因為圖中測量點離參考節(jié)點的距離最大為12.73 m,所以在信號強度采集的時候M值設置為13,即需要在距離參考節(jié)點1,2,…,13 m的位置對信號強度進行采集和分析。為了節(jié)省時間,考慮到4塊定向天線的型號一樣,對天線信號強度的采集和分析只進行了一次。
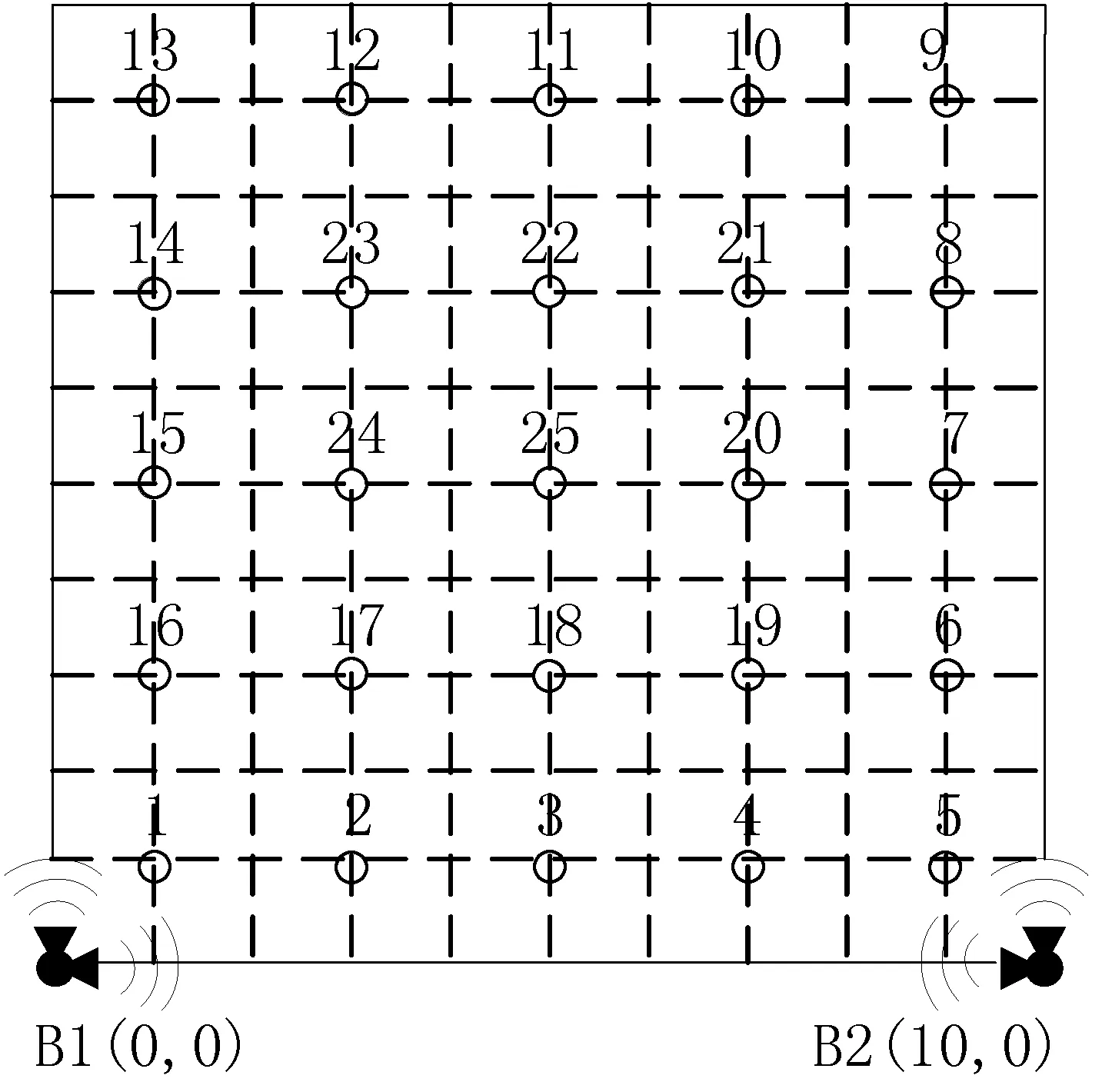
圖6 實驗區(qū)域平面圖
2.2實驗結果分析
在距離參考節(jié)點不同距離時,所生成的二次拋物擬合函數(shù)(Q)和線性擬合函數(shù)(L)的決定系數(shù)R2的大小變化如圖7所示。從圖中可以看出決定系數(shù)值一直在0.96以上,也就是說擬合的函數(shù)關系非常適合表示所測量的信號強度值和信強差值隨方位角度的變化關系,這是本文定位方法得以實踐的前提。
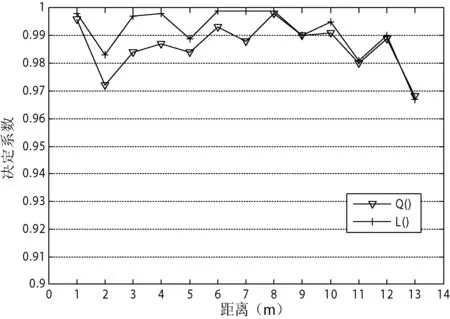
圖7 二次拋物Q和線性L擬合函數(shù)在不同距離的決定系數(shù)R2分布
對實驗區(qū)域的25個測量點進行定位,設置參考節(jié)點每秒鐘向覆蓋的區(qū)域發(fā)送十次信號,待測節(jié)點可以在每秒鐘內(nèi)對自身定位10次,取10次結果的均值作為最終的定位結果。定位計算的位置與實際位置的誤差累計分布見圖8所示。
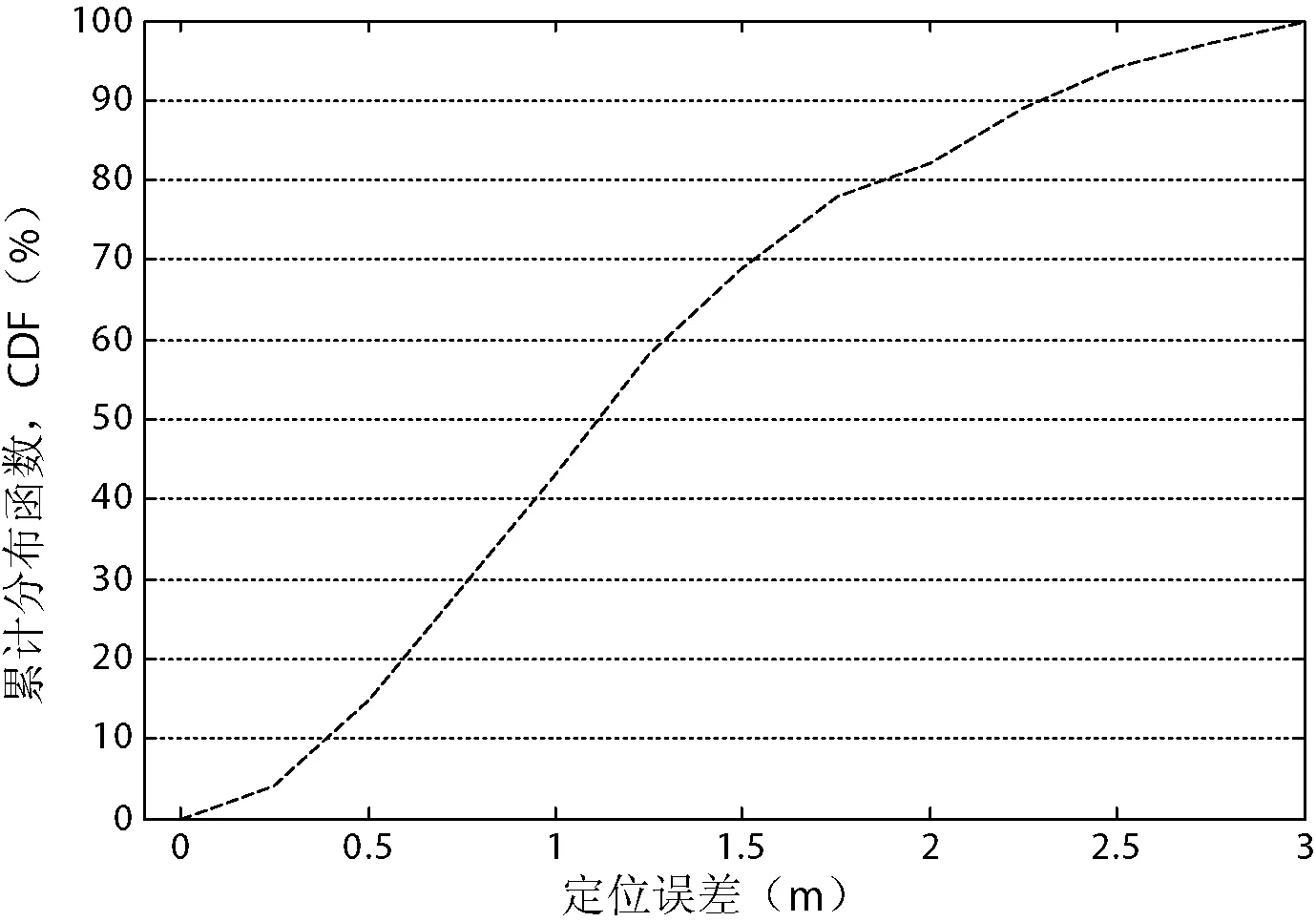
圖8 定位累積誤差分布
圖9是25個定位點的定位誤差(歐氏距離)大小分布。根據(jù)圖6定位點的分布規(guī)律,分布在定位區(qū)域靠近中間部分的定位點的誤差值比靠近邊緣的定位點的誤差值更小。這一現(xiàn)象從圖3可以得到解釋,因為在靠近45°位置的函數(shù)線性程度比較好,與擬合的函數(shù)(L)更近似,而使得定位誤差偏小。最后,由圖9中的定位實驗誤差計算得到平均定位誤差為121 cm。
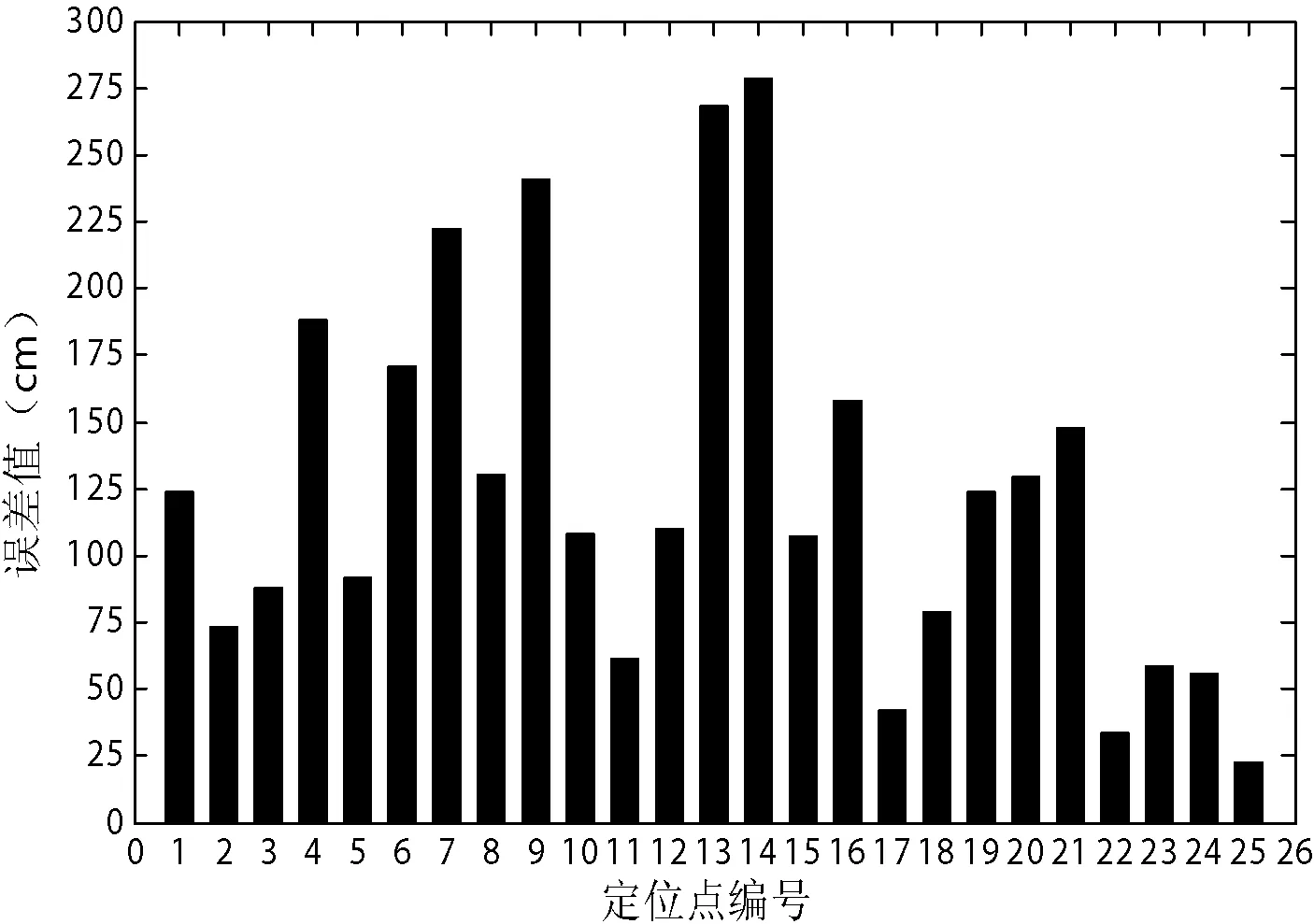
圖9 25個定位點的定位誤差大小分布
3 定位誤差改進
考慮定位過程中會出現(xiàn)個別定位結果與整體定位結果偏差比較大,本文提出了一種最大密度(LD)的方法來降低定位誤差。假設P是待測點估算的定位結果集合,如果從結果集合P中移除某些結果后存在子集P′?P,使P′達到最大密度,那么將P′替換P。密度ρ定義如下:
(2)
其中N是集合的基數(shù),Dia是集合內(nèi)所有定位結果圍成區(qū)域的最大直徑距離,可以通過求解兩個位置之間的距離求得。以下就是集合最大密度確定的步驟:
(1) 如果|P|<3,就返回P;
(2) 通過計算出集合中某位置與其他位置之間距離的總和,將距離總和最大的元素移出集合得到集合P′,計算P′的密度ρ′;
(3) 如果ρ>ρ′,返回集合P;ρ<ρ′,令P=P′后接著進行(1)。
用LD方法對使用LRD方法所取得的定位結果進行處理。經(jīng)計算后,加入LD之后平均定位誤差從121 cm下降到了85 cm,定位性能提升了29%。定位誤差的累計分布函數(shù)如圖10所示,對比兩條曲線可以看到定位性能有明顯改善。
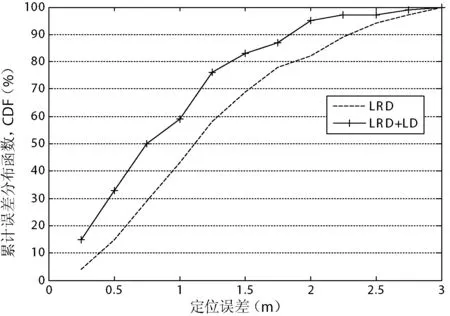
圖10 改進后的定位累積誤差分布
同時,表1還比較了兩種本文所提及的無線定位方法及定位效果。從表中可以看出本文方法不僅有較高的定位精度,而且保證了定位的實時性,定位性能有明顯的改善。
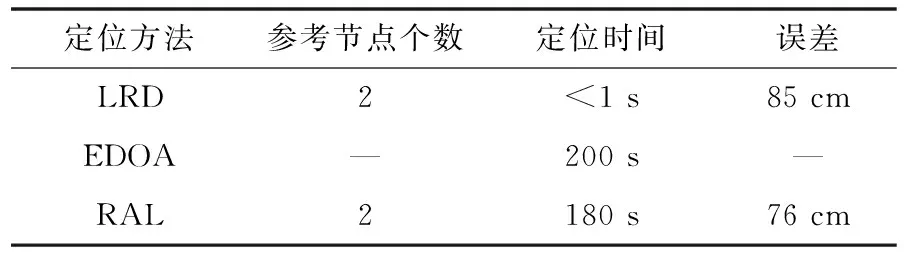
表1 幾種定向定位方法的定位效果比較
4 結 語
本文在定向天線的定位領域內(nèi)提出了一種基于信號強差的快速定位方法。在保證較高定位精度的同時克服了旋轉定向天線定位系統(tǒng)的實時性問題,并且在10 m×10 m的室內(nèi)環(huán)境中進行了實際的定位實驗,定位實驗結果計算所得到的平均定位誤差為121 cm。除此之外,本文還提出了最大密度的方法對定位后的結果數(shù)據(jù)進行處理,使平均誤差值降到85cm。下一步工作將利用本文定位方法進行更大面積范圍的定位實驗,還將更換不同型號的定向天線在比較中提高定位的精度。
[1] 崔遜學,左從菊.無線傳感器網(wǎng)絡簡明教程[M].北京:清華大學出版社,2009:69.
[2] 孫佩剛,趙海,羅玎玎,等.智能空間中RSSI定位問題研究[J].電子學報, 2007,35(7):1240-1245.
[3] 楊清.基于指紋的無線室內(nèi)精度定位方法研究[D].浙江:浙江大學,2011.
[4] Gu Y, Lo A, Niemegeers I.A survey of indoor positioning systems for wireless personal networks[J].Communications Surveys & Tutorials, IEEE, 2009, 11(1):13-32.
[5] Kivim?ki T, Vuorela T, Peltola P, et al.A Review on Device-Free Passive Indoor Positioning Methods[J].International Journal of Smart Home, 2014, 8(1):71-94.
[6] Chuku N, Nasipuri A. Performance evaluation of an RSSI based localization scheme for wireless sensor networks to mitigate shadowing effects[C]//Wireless Communications and Networking Conference (WCNC),IEEE,2014:3124-3129.
[7] Salim F,Williams M,Sony N, et al.Visualization of wireless sensor networks using ZigBee’s Received Signal Strength Indicator (RSSI) for indoor localization and tracking[C]//Pervasive Computing and Communications Workshops (PERCOM Workshops), 2014 IEEE International Conference on. IEEE,2014:575-580.
[8] 胡迪,錢松榮.基于RSSI自適應無線定位算法[J].計算機應用與軟件, 2014, 31(9):139-141.
[9] 董振中,王恩博.無線傳感器網(wǎng)絡中一種基于定向天線的節(jié)點定位算法[J].電子技術,2010,37(10):7-9.
[10] Ou Chiaho.A Localization Scheme for Wireless Senor Networks Using Mobile Anchors with directional Antennas[J].Sensor Journal,IEEE,2011,11(7):1607-1616.
[11] Chen Y, Liu Z, Ding Y, et al. On sampling signal strength for localization using a directional antenna[C]//World of Wireless, Mobile and Multimedia Networks (WoWMoM), 2011 IEEE International Symposium on a. IEEE, 2011:1-6.
[12] Ou C H. A localization scheme for wireless sensor networks using mobile anchors with directional antennas[J]. Sensors Journal, IEEE, 2011, 11(7):1607-1616.
[13] Kanaris L, Kokkinis A, Raspopoulos M, et al. Improving RSS fingerprint-based localization using directional antennas[C]//Antennas and Propagation (EuCAP), 2014 8th European Conference on. IEEE, 2014:1593-1597.
[14] Jiang J R, Lin C M, Hsu Y J. Localization with rotatable directional antennas for wireless sensor networks[C]//Parallel Processing Workshops (ICPPW), 2010 39th International Conference on. IEEE, 2010:542-548.
[15] Hood B N,Barooah P.Estimating DoA from radio frequency rssi measurements using an actuated reflector[J].IEEE Sensors Journal,2011,11(2):413-417.
[16] 龔淼,馮友兵,卞建秀.基于移動錨節(jié)點的WSN節(jié)點定位方法[J].計算機科學,2013,40(11A):37-40.
[17] 李海濤,李燕,張建忠.微波定向天線對準實現(xiàn)方法[J].無線電工程,2011,41(3):44-46.
LOCALISATION BASED ON RSSI DIFFERENCE OF DIRECTIONAL ANTENNAS
Li XinchunLan Gen
(SchoolofElectronicsandInformationEngineering,LiaoningTechnicalUniversity,Huludao125105,Liaoning,China)
To solve the problems of directional antenna-based localisation method in real-time performance and accuracy, we propose an indoor localisation scheme which is based on RSSI differences of directional antennas, namely LRD. It uses the node with two directional antennas perpendicular to each other as the reference node, the angle variable of a directional antenna and the RSSI value can be fitted approximately into a parabola function when the regional distance covered by the antenna is unchanged. And for the difference of the RSSI values of two reference directional antennas captured by the target node, when the distance is unchanged the angle variable and the difference can be fitted approximately into a linear function. A target node can locate itself with the help of two kinds of functions. We also propose a method named largest density (LD) to improve the results of localisation. Experimental results show that this method can quickly locate the target and has higher localisation accuracy.
Directional antennaRSSI differenceLocalisationLargest density
2015-03-11。李新春,高工,主研領域:無線傳感網(wǎng)絡,嵌入式系統(tǒng)。蘭根,碩士生。
TP393
A
10.3969/j.issn.1000-386x.2016.08.037
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56