小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合在AUV深度測量中的應(yīng)用
2016-09-12 10:04:14吳亞軍毛昭勇
水下無人系統(tǒng)學(xué)報(bào) 2016年4期
吳亞軍, 毛昭勇
(1. 海軍裝備部, 陜西 西安, 710077; 2. 西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安, 710072)
小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合在AUV深度測量中的應(yīng)用
吳亞軍1, 毛昭勇2
(1. 海軍裝備部, 陜西 西安, 710077; 2. 西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安, 710072)
針對常規(guī)自主式水下航行器(AUV)深度傳感器尚未考慮受內(nèi)部環(huán)境溫度、電流等影響的問題, 基于小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合技術(shù), 建立了融合溫度傳感器、電流傳感器和深度傳感器樣本信息的 AUV深度測量緊致型小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)模型, 并利用基于梯度的學(xué)習(xí)算法進(jìn)行求解。試驗(yàn)數(shù)據(jù)表明, 深度傳感器測量精度經(jīng)過小波神經(jīng)網(wǎng)絡(luò)信息融合后, 測量誤差大大降低, 很好地消除了環(huán)境溫度、電流等干擾因素對深度傳感器測量精度的影響。
自主式水下航行器(AUV); 深度傳感器; 多傳感器信息融合; 小波神經(jīng)網(wǎng)絡(luò); 測量精度
0 引言
水下航行器作為人類開發(fā)和利用海洋的有效工具, 在科學(xué)研究、軍事、工業(yè)等領(lǐng)域的應(yīng)用越來越廣泛。水下航行器擁有大量的測試傳感器, 其中用于測量航行深度的深度傳感器是非常重要的儀器, 如果測量精度較低, 將直接影響到航行器的控制及航行彈道軌跡, 也可能會(huì)使航行器耐壓殼體超過其所能承受的最大工作深度, 導(dǎo)致航行器損壞。
水下航行器的所有儀器設(shè)備都封裝在一個(gè)密閉的耐壓殼體內(nèi), 而其動(dòng)力能源絕大部分采用鋰電池組, 由于鋰電池組在使用過程中內(nèi)部發(fā)生的電化學(xué)反應(yīng)會(huì)不斷產(chǎn)生熱量, 使航行器密閉空間的內(nèi)部環(huán)境溫度發(fā)生變化, 同時(shí)鋰電池組在放電過程中或多次充電使用后, 對外提供的電流也會(huì)發(fā)生變化, 這些因素都會(huì)對傳感器的測量精度、穩(wěn)定性產(chǎn)生影響。目前, 在水下航行器設(shè)計(jì)階段,很少同時(shí)考慮環(huán)境溫度、電流等多因素對深度傳感器的影響。
由于小波神經(jīng)網(wǎng)絡(luò)對非平穩(wěn)信息具有獨(dú)特且良好的時(shí)頻局部特性和變焦能力, 同時(shí)又具有神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)和自適應(yīng)的能力, 它不需要預(yù)先給出判別函數(shù), 通過自身的學(xué)習(xí)機(jī)制就可以自動(dòng)形成所需要的決策區(qū)域, 并充分利用溫度傳感器、電流傳感器和深度傳感器的樣本信息, 對不同的樣本進(jìn)行逐一訓(xùn)練, 獲得均衡的收斂的權(quán)值, 這些權(quán)值同時(shí)也代表了網(wǎng)絡(luò)中內(nèi)含的非線性映射關(guān)系。基于此, 為提高航行器深度測量的準(zhǔn)確性, 文中采用小波神經(jīng)網(wǎng)絡(luò)技術(shù), 融合深度、溫度及電流等多傳感器的信息,并利用基于梯度的學(xué)習(xí)算法進(jìn)行求解, 較好地提高了水下航行器深度測量的精度。
1 小波神經(jīng)網(wǎng)絡(luò)
小波神經(jīng)網(wǎng)絡(luò)最早由法國著名信息科學(xué)研究機(jī)構(gòu) IRLSA于1992年提出, 是基于小波變換而構(gòu)成的神經(jīng)網(wǎng)絡(luò)模型, 即用非線性小波基取代通常的神經(jīng)元非線性激勵(lì)函數(shù)[1-2]。小波神經(jīng)網(wǎng)絡(luò)相比于前向的神經(jīng)網(wǎng)絡(luò), 具有明顯的優(yōu)點(diǎn): 首先小波神經(jīng)網(wǎng)絡(luò)的基元和整個(gè)結(jié)構(gòu)是依據(jù)小波分析理論確定的, 可以避免 BP神經(jīng)網(wǎng)絡(luò)等結(jié)構(gòu)設(shè)計(jì)上的盲目性; 其次小波神經(jīng)網(wǎng)絡(luò)有更強(qiáng)的學(xué)習(xí)能力,收斂速度快, 精度高[3-7]。
1.1 小波變換


等效的頻率表示
1.2 小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)形式
目前小波變換和神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)結(jié)合方式主要有松散型結(jié)構(gòu)和緊致型結(jié)構(gòu)2種[8]。
1.2.1 松散型結(jié)構(gòu)
先用小波分析對信號進(jìn)行預(yù)處理, 信號的特征提取是通過將信號的內(nèi)積與小波基進(jìn)行加權(quán)和來實(shí)現(xiàn)的, 然后再將提取的特征向量送入神經(jīng)網(wǎng)絡(luò)處理, 如圖1所示。

圖1 小波神經(jīng)網(wǎng)絡(luò)松散型結(jié)構(gòu)Fig. 1 Schematic of loose topological structure of wavelet neural network
1.2.2 緊致型結(jié)合
在小波變換和神經(jīng)網(wǎng)絡(luò)的結(jié)合過程中, 通過用小波函數(shù)來代替常規(guī)的神經(jīng)網(wǎng)絡(luò)隱層節(jié)點(diǎn)的傳輸函數(shù)來實(shí)現(xiàn), 如圖2所示。
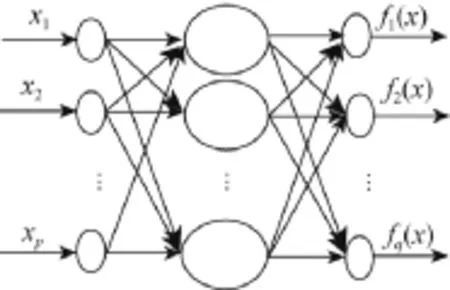
圖2 小波神經(jīng)網(wǎng)絡(luò)緊致型結(jié)構(gòu)Fig. 2 Schematic of compact topological structure of wavelet neural network
1.3 學(xué)習(xí)算法
在確定了小波神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)之后, 小波基函數(shù)的時(shí)間平移因子和尺度伸縮因子也可事先確定, 因此, 小波神經(jīng)網(wǎng)絡(luò)的可調(diào)參數(shù)只有權(quán)值系數(shù)。小波神經(jīng)網(wǎng)絡(luò)參數(shù)的學(xué)習(xí)算法可以采用梯度下降法、正交搜索法、矩陣求逆法等。實(shí)際上, 由于小波神經(jīng)網(wǎng)絡(luò)的輸出與其權(quán)值是線性的, 因而不存在局部最小的缺陷。
文中主要介紹緊致型連續(xù)參數(shù)的小波神經(jīng)網(wǎng)絡(luò)基于梯度的學(xué)習(xí)算法, 其數(shù)學(xué)模型表示如下[8-9]。

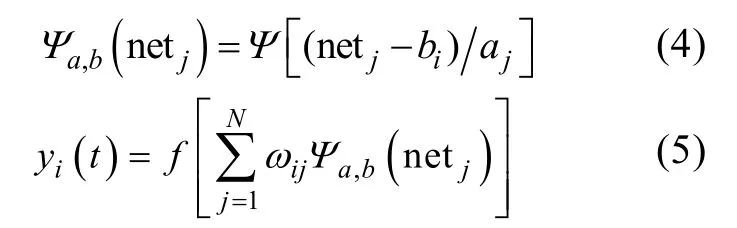
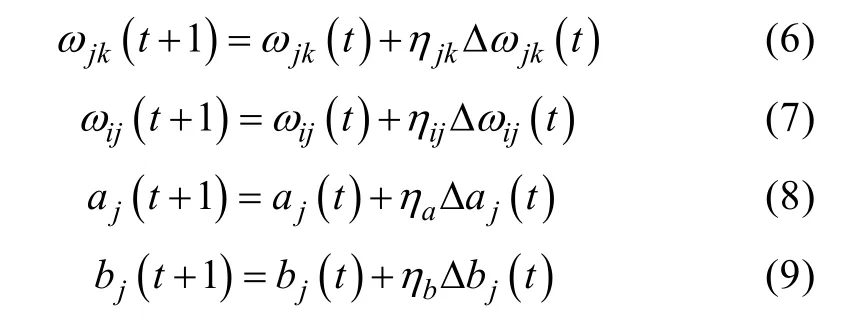
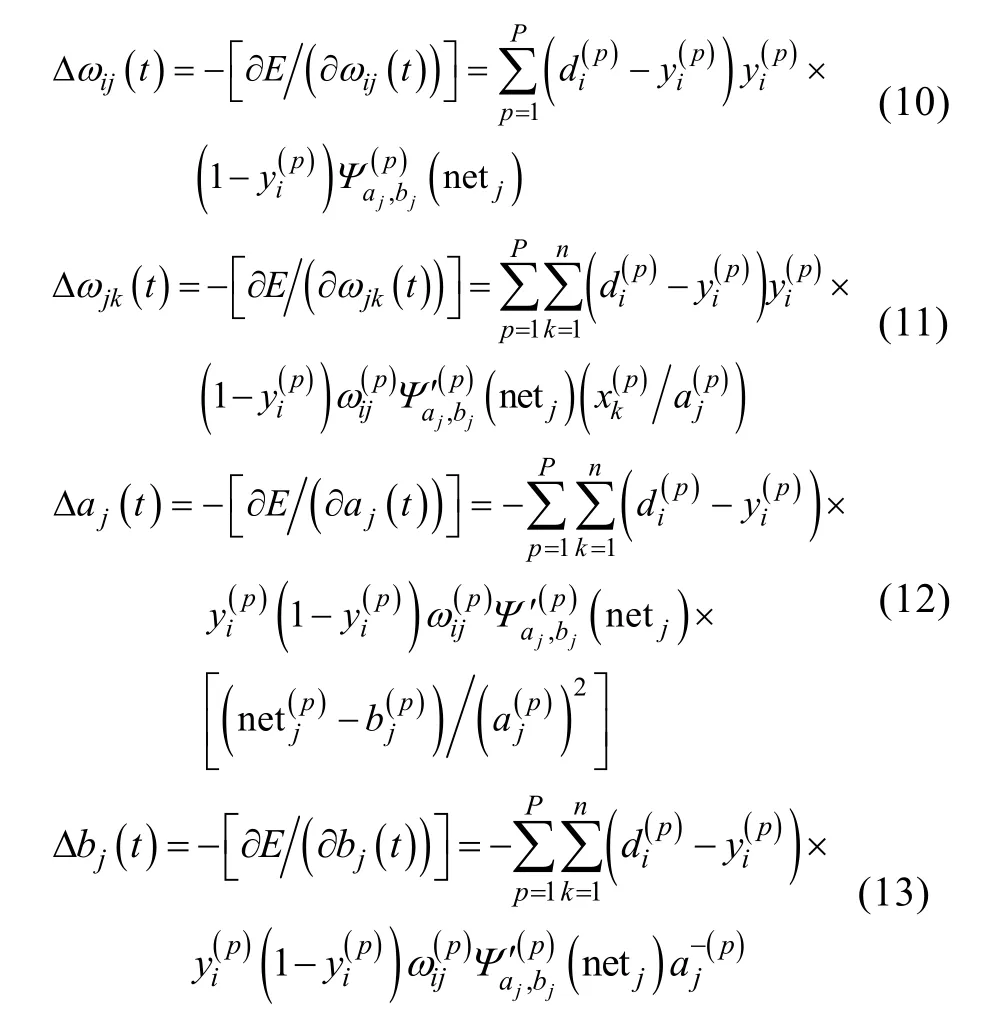
基于梯度下降法, 相應(yīng)各參數(shù)調(diào)整過程如下
2 基于小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合的AUV深度測量建模
文中主要針對水下航行器深度傳感器的信息融合進(jìn)行研究, 為了消除溫度、電流因素對深度傳感器輸出值的影響, 建立了如圖3所示結(jié)構(gòu)模型。
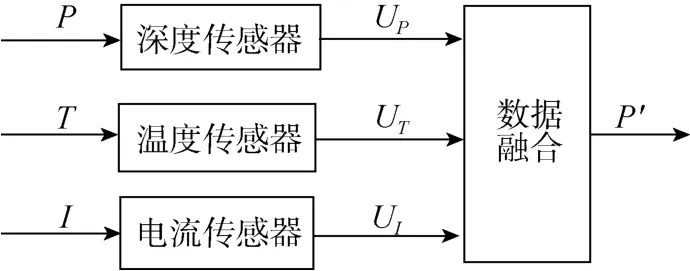
圖3 水下航行器深度測量結(jié)構(gòu)圖Fig. 3 Topological structure of autonomous underwater vehicle(AUV) depth measurement

設(shè)輸出層到隱層的權(quán)值ijω, 隱層到輸入層的權(quán)值jkω , 中間隱層的尺度伸縮因子和時(shí)間平移因子為和, 故。則t時(shí)刻有

3 仿真結(jié)果與分析
通過文中建立的水下航行器深度傳感器信息融合小波神經(jīng)網(wǎng)絡(luò)模型, 設(shè)定小波神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速率分別為0.1, 0.001。選取標(biāo)定壓力(MPa)分別為0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6等7個(gè)標(biāo)定點(diǎn), 溫度在25℃下, 電流(A)在0.5, 0.6, 0.7, 0.8, 0.9, 1.0,1.1下3個(gè)傳感器輸出值為訓(xùn)練樣本, 通過小波神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練建立深度傳感器的數(shù)學(xué)模型, 并由測試樣本得到壓力預(yù)測值和壓力預(yù)測值誤差,見圖4、圖5。
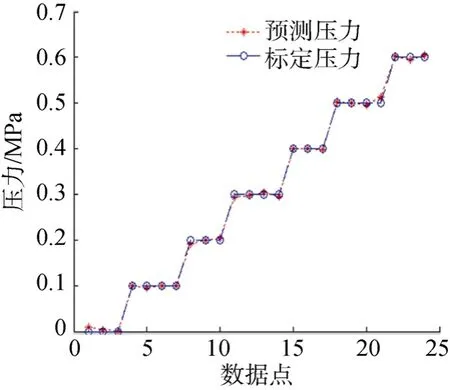
圖4 壓力預(yù)測值與壓力標(biāo)定值對比圖Fig. 4 Contrast of pressure prediction value and calibration value

圖5 壓力預(yù)測值誤差曲線Fig. 5 Absolute error curve of pressure prediction value
由圖4和圖5可知, 文中建立的小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合模型能夠精確估計(jì)實(shí)際壓力,很好地消除了溫度、電流等干擾因素對深度傳感器的影響。深度傳感器經(jīng)過小波神經(jīng)網(wǎng)絡(luò)信息融合后, 測量誤差得到了大大的降低。
小波神經(jīng)網(wǎng)絡(luò)與BP神經(jīng)網(wǎng)絡(luò)都可以用于傳感器輸出性能的改善, 文中分別利用小波神經(jīng)網(wǎng)絡(luò)與BP神經(jīng)網(wǎng)絡(luò)[10]對深度傳感器的測量誤差進(jìn)行分析, 取相同的網(wǎng)絡(luò)結(jié)構(gòu)、初始權(quán)值和閾值等參數(shù)進(jìn)行訓(xùn)練, 仿真結(jié)果如圖6所示。
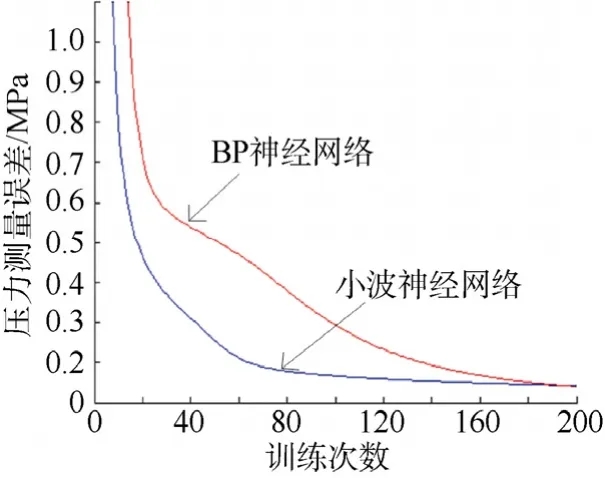
圖6 2種神經(jīng)網(wǎng)絡(luò)誤差預(yù)測曲線對比圖Fig. 6 Contrast of absolute error curves of pressure prediction value between two kinds of neural networks
由圖中結(jié)果可看出, 小波神經(jīng)網(wǎng)絡(luò)較BP神經(jīng)網(wǎng)絡(luò)所獲得的壓力測量誤差小, 預(yù)測精度高, 能更好的預(yù)測實(shí)際壓力。同時(shí)由誤差曲線可以看出,小波神經(jīng)網(wǎng)絡(luò)比BP神經(jīng)網(wǎng)絡(luò)收斂速度更快。因此,小波神經(jīng)網(wǎng)絡(luò)可適用于深度傳感器的信息融合,能較好地提高水下航行器深度測量的精度。
4 結(jié)束語
文中基于小波神經(jīng)網(wǎng)絡(luò)多傳感器信息融合技術(shù), 研究了提高水下航行器深度傳感器的測量精度的問題。建立了融合溫度傳感器、電流傳感器和深度傳感器樣本信息的水下航行器深度測量緊致型小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)模型, 并利用基于梯度的學(xué)習(xí)算法進(jìn)行求解。試驗(yàn)數(shù)據(jù)仿真表明, 深度傳感器測量精度經(jīng)過小波神經(jīng)網(wǎng)絡(luò)信息融合后, 可以有效地減小環(huán)境溫度、電流等影響深度傳感器穩(wěn)定性的干擾因素, 改善其穩(wěn)定性, 從而提高水下航行器深度測量的精度。
[1] Delyon B, Judisky A, Benveniste A. Accuracy Analysis for Wavelet Approximations[J]. IEEE Trans on Neural Networks, 1995, 6(2): 332-348.
[2] Van Ooyen A, Ninenuis B. Improving the Convergence of Back-propagation Algorithm[J]. Neural Networks, 1992,5(3): 465-471.
[3] 宋娜. 基于小波分析的車牌圖像增強(qiáng)與字符識別研究[D]. 重慶: 重慶大學(xué), 2010.
[4] 王鳳霞. 基于小波神經(jīng)網(wǎng)絡(luò)的風(fēng)力發(fā)電機(jī)組故障診斷方法的研究[D]. 北京: 華北電力大學(xué), 2012.
[5] 高美靜, 胡黎明. 基于遺傳小波神經(jīng)網(wǎng)絡(luò)的壓力傳感器的非線性校正研究[J]. 傳感技術(shù)學(xué)報(bào), 2007, 20(4): 816- 819.
[6] 姚敏, 趙敏, 邢力. 基于小波神經(jīng)網(wǎng)絡(luò)的壓力傳感器溫度補(bǔ)償方法[J]. 傳感器技術(shù), 2005, 24(7): 13-15.
[7] 原泉, 董朝陽, 王青. 基于小波神經(jīng)網(wǎng)絡(luò)的多傳感器自適應(yīng)融合算法[J]. 北京航空航天大學(xué)學(xué)報(bào), 2008, 34(11): 1331-1334.
[8] 胡江為. 基于小波神經(jīng)網(wǎng)絡(luò)多傳感器融合技術(shù)的研究[D]. 淮南: 安徽理工大學(xué), 2011.
[9] 程聲烽, 程小華, 楊露. 基于改進(jìn)粒子群算法的小波神經(jīng)網(wǎng)絡(luò)在變壓器故障診斷中的應(yīng)用[J]. 電力系統(tǒng)保護(hù)與控制, 2014, 42(19): 37-42.
[10] 莊哲民, 殷國華, 李芬蘭, 等. 基于小波神經(jīng)網(wǎng)絡(luò)的風(fēng)力發(fā)電機(jī)故障診斷[J]. 電工技術(shù)學(xué)報(bào), 2009, 24(4): 224- 228.
(責(zé)任編輯: 楊力軍)
Application of Multi-Sensor Information Fusion Based on Wavelet Neural Network to Depth Measurement for AUV
WU Ya-jun1, MAO Zhao-yong2
(1. Navy Armament Department, Xi′an 710077, China;2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
To consider the influences of internal ambient temperature, current and other factors on the measurement accuracy of an autonomous underwater vehicle(AUV) depth sensor, a compact type depth measurement model is established by means of the wavelet neural network based multi-sensor information fusion technology. This model fuses the sample information of temperature, current and depth sensors. The gradient based learning algorithm is adopted to solve the model. Experimental results show that the measurement error of the depth sensor is significantly reduced after wavelet neural network based information fusion, and the influences of the disturbing factors, such as internal ambient temperature and current, on the depth sensor are eliminated. It is concluded that wavelet neural network can be used in the information fusion of AUV depth sensor to effectively improve the performance of the depth sensor.
autonomous underwater vehicle(AUV); depth sensor; multi-sensor information fusion; wavelet neural network; measurement accuracy
TJ630.34; TB564
A
1673-1948(2016)04-0267-04
10.11993/j.issn.1673-1948.2016.03.005
2015-11-03;
2016-05-02.
吳亞軍(1979-), 男, 工程師, 主要從事魚雷科研和生產(chǎn)的管理工作.
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
