基于超聲波定位的舞臺自動追光燈設計
2016-09-12 02:34:31謝之光呂東航
電子設計工程 2016年4期
王 君,謝之光,呂東航,候 剛
(吉林大學 儀器科學與電氣工程學院,吉林 長春 130021)
基于超聲波定位的舞臺自動追光燈設計
王 君,謝之光,呂東航,候 剛
(吉林大學 儀器科學與電氣工程學院,吉林 長春 130021)
由于舞臺燈光發熱量大,人工控制燈光跟蹤舞臺演員不可能一個人長時間完成,而且燈光耀眼,給操作者帶來很大難度,因此急需一種可以自動控制跟蹤演員的設備。基于此,本文介紹了超聲波定位原理,然后提出了一種基于STM32單片機并結合無線通訊技術和超聲波技術的舞臺自動追光燈系統設計。本超聲波定位系統不只局限于舞臺追蹤,還可以擴大范圍,應用到其他工程現場。如:用于礦坑里的工人定位,可以避免工人的誤操作走入不安全的區域,也可在發生礦難時,及時趕到曠工遇難現場拯救曠工生命。
舞臺追光;STM32單片機;無線通訊技術;超聲波定位技術
追光燈的運用是舞臺藝術中不可或缺的重要手段,達到突出重點、塑造人物形象、烘托環境氣氛的目的。本文提出舞臺燈光隨動系統的方案設想及實現的方式。該系統的實現很好地完成燈光隨動功能,降低演出成本,節省人力、物力,完善舞臺燈光技術中追光燈的功能和自動化控制的程度。
1 超聲波定位原理
本系統利用3個固定在空中的超聲波節點,來實現對一個在三維直角坐標系中的移動節點的定位,總體空間分布圖[1]如圖1所示。
圖1中,1號節點為移動超聲波發射節點,即所需要定位的節點,2、3、4號節點為固定超聲波接收節點,由于受到超聲波的發射角的限制,所以將系統設計成空間結構,從而可以保證1號節點在三維平面內運動時可以使2、3、4號節點收到發射的超聲波,且假定各超聲波接收模塊的高度均為H,2號節點與3號節點、3號節點與4號節點都為L。
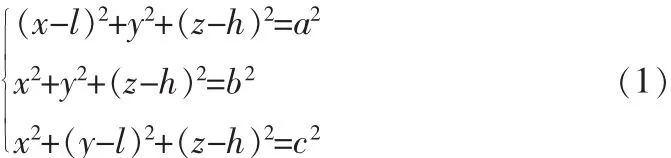
本文選用聲波傳播時間測量法來實現測距[2]。為了消除接收信號中回波的影響,本文利用聲速相對光速慢的特點,設計出了一種新的聲波傳播時間測量法:將超聲波發射傳感器與射頻發射模塊置于A端,而將超聲波的接收傳感器與射頻的接收傳感器置于B端,先從A端發射射頻信號,告之B端發射超聲波,由于電磁波的傳播速度比聲速大得多,所以可以忽略射頻的傳播時間,從A端發射射頻開始計時,到B端收到超聲波信號為止,記錄這段時間,則可以用式s=vt來計算A端與B端的距離(其中v為聲速,因為本系統測試時溫度基本恒定在25℃,所以聲速可取恒定值346.575 m/s),利用這種方法,可以分別得到系統空間分布圖中的移動節點到3個固定節點的距離a、b、c,以此可在空間直角坐標系中建立3個球面方程[3]。

圖1 系統空間分布圖Fig.1 The spatial distribution map of the system
即:
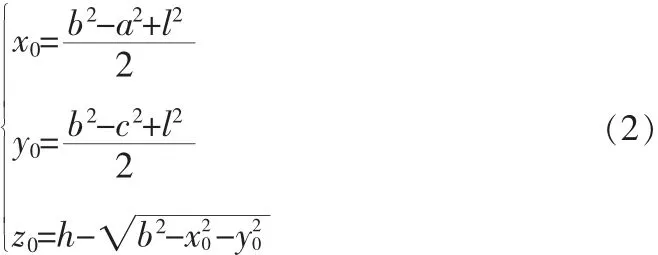
聯立方程可解得1號節點的空間坐標(x0,y0,z0):
2 系統硬件設計
本系統由攜帶機系統和主系統兩部分構成[4-5],攜帶機系統由舞臺演員攜帶,定時發送無線電信號和超聲波信號。主系統實時接收無線電信號和超聲波信號,并經過數學模型的計算得到攜帶機的空間坐標,從而調整燈光的照射方向,對演員進行實時追光。
2.1 攜帶機系統
攜帶機系統以STC89C52單片機為控制核心,并由NRF905無線芯片、超聲波發射電路以及獨立電源組成。攜帶機系統框圖如圖2所示。

圖2 攜帶機系統框圖Fig.2 The block diagram of carrying machine system
2.1.1 STC89C52微控制器
本設計的微控制器采用的是 STC89C52,STC89C52是STC公司生產的一種高性能CMOS8位微控制器,它具有結構簡單、功耗低、易于開發等優點,且支持在線系統編程、無需編程器、方便系統的開發和維護。系統工作時,STC89C52定時給NRF905無線模塊和超聲波發射模塊觸發信號使其發射無線電信號和超聲波信號。
2.1.2 NRF905無線模塊
NRF905無線芯片是有挪威NORDIC公司出品的低于1 GHz無線數傳芯片,主要工作于433MHz、868MHz和915MHz 的ISM頻段。芯片內置頻率合成器、功率放大器、晶體振蕩器和調制器等功能模塊,輸出功率和通信頻道可通過程序進行配置。非常適合于低功耗、低成本的系統設計。
2.1.3 超聲波發射電路
超聲波發射電路如圖3所示,驅動電壓是3~5 V,其主要特點是采用變壓器升壓,加在發射頭上的電壓峰-峰值約 60 ~80 V,使得發射功率大大增加,這樣一方面為增加距離提供可能,另一方面為提高精度打下基礎,因為信號強,使得回波檢測更加可靠。圖中C8、C9為微調負載電容,為了達到諧振。P1、R4、R5為余波抑制電路,因為利用了變壓器和發射頭的諧振,好處是能得到近似正弦波。但附帶的問題是:在驅動信號停止后,由于諧振的原因,發射頭還會持續較長時間發射,直至能量在變壓器的次級線包直流電阻上消耗完,這樣就導致在近距離測量時,回波都到了,余波還未結束,導致測量失敗。所以設計了一個余波抑制電路,將變壓器初級構成回路,利用初級較小的電阻快速消耗掉次級的能量。R3是為了可靠而設計的,因為模塊是通過插頭連接的,難免有加上了電壓卻沒有加驅動信號的情況,此時將有可能導致MOS管導通。

圖3 超聲波發射電路Fig.3 The ultrasonic transmitting circuit
2.2 主系統
主系統以STM32單片機為控制核心,并由NRF905無線芯片、超聲波接收電路、二自由度的舵機系統以及光源組成。主系統框圖如圖4所示。

圖4 主系統框圖Fig.4 The block diagram of the main system
2.2.1 STM32微控制器
STM32系列基于專為要求高性能、低成本、低功耗的嵌入式應用專門設計的ARM?Cortex-M3內核。按性能分成兩個不同的系列:STM32F103“增強型”系列和STM32F101“基本型”系列。本系統采用增強型系列,增強型系列時鐘頻率達到72 MHz,是同類產品中性能最高的產品;STM32功耗36 mA,是32位市場上功耗最低的產品,相當于0.5 mA/MHz。系統工作時,STM32單片機實時接收無線電信號和超聲波信號,快速的獲取目標的空間坐標并及時的調整燈光的照射方向。
2.2.2 超聲波接收電路
圖5為超聲波接收電路的核心部分,由專用超聲波接收集成電路TL852構成的超聲波信號檢測電路。這是按照TL852手冊上的推薦電路設計的,參數是針對40 kHz頻率的。這部分完成了回波的放大和檢出。其主要特色是選頻和變增益,此外是靈敏度改變比較容易。
圖6為超聲波接收電路的輸出信號提取部分:由低電壓運放LMV358組成,因為考慮要和3 V供電的MCU配合,所以選用了支持滿幅輸出的LMV358。電路為兩部分,前面是一級跟隨器,為了提高輸入阻抗,減小對TL852輸出電容積分的影響。第二級是比較器,為了輸出下降沿較好的信號給MCU。
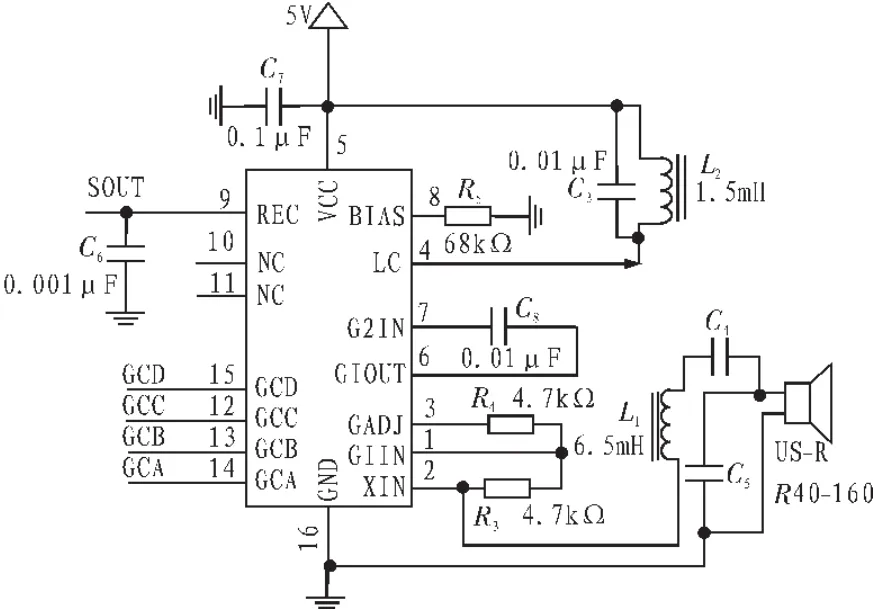
圖5 超聲波接收電路Fig.5 The ultrasonic receiving circuit
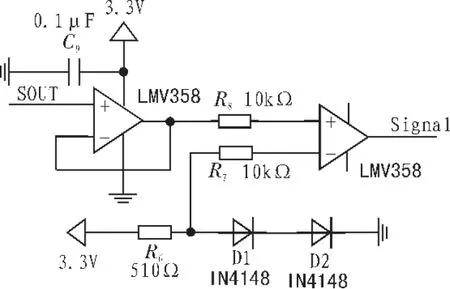
圖6 超聲波接收電路的信號提取部分電路Fig.6 The signal extraction circuit of the ultrasonic receiving circuit
3 系統軟件設計
本系統軟件設計也由攜帶機系統軟件和主系統軟件兩部分組成,攜帶機系統軟件設計主要分為兩個模塊:NRF905模塊、超聲波發射模塊。其中NRF905模塊用于發射無線電波信號,超聲波發射模塊用于發射超聲波信號。攜帶機系統軟件設計流程圖如圖7所示。上電復位后,初始化NRF905,單片機每隔50 ms同時向:NRF905模塊和超聲波發射模塊發送觸發信號使其發射無線電信號和超聲波信號。主系統軟件設計主要分為3個模塊:NRF905模塊、三路超聲波接收模塊以及二自由度舵機系統。其中NRF905模塊用于接收無線電波信號,三路超聲波接收模塊用于接收超聲波信號,二自由度電機用于控制燈光的照射方向。主系統系統軟件設計流程圖如圖8所示。上電復位后,初始化NRF905并禁止超聲波接收模塊接收超聲波信號。當NRF905接收到無線電信號后產生中斷,單片機開始計時。當某一路超聲波接收模塊接收到超聲波信號后產生中斷,單片機在中斷中計算出改路超聲波接收節點到移動節點的距離。三路都接收到超聲波信號后可以由超聲波定位原理得到攜帶機的空間坐標[6-7],然后單片機控制二自由度的舵機調整光源的照射方向。
4 結 論
本系統以stm32單片機作為主控芯片機并結合無線通訊技術和超聲波技術設計的舞臺自動追光燈系統設計成功地解決人工控制燈光跟蹤舞臺演員的問題。經過測試[8],在所選實驗條件下,超聲波傳感器的發射距離超過1 000 cm,基本可以實現在800.0 cm*800.0 cm的舞臺中使用,另外也適合于各種需要自動追蹤燈光的工作。
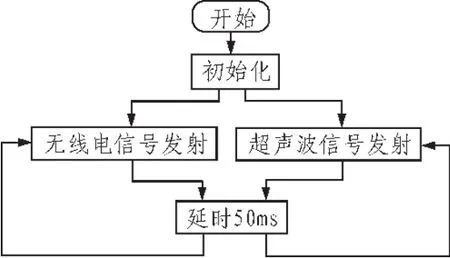
圖7 攜帶機軟件設計流程圖Fig.7 The flow chart of software design of main system

圖8 主系統軟件設計流程圖Fig.8 The flow chart of software design of carrying machine system
[1]王富東.超聲波定位系統的原理與應用[J].自動化與儀表,1998,13(3):43-77.
[2]雷鳴靂,周功道,馮祖仁.基于偽碼相關技術的超聲波無線電定位系統[J].微電子學與計算機,2004,21(3):18-55.
[3]楊敏華,李利軍,李朝暉.超聲波三維空間定位在虛擬現實系統中的應用[J].計算機仿真,2004,21(11):36-48.
[4]阮一暉.基于超聲波定位技術的障礙探測系統[J].蘇州大學,2007,16(4):18-23.
[5]寇海洲.基于超聲波的定位系統研究與實現[D].數據通信,2008.
[6]卜英勇,王紀嬋,趙海鳴,等.基于單片機的高精度超聲波測距系統[J].儀表技術與傳感器,2007(3):66-68.
[7]寇海洲,莊毅.無線傳感器網絡超聲波定位算法的研究[J].航空計算技術,2008,38(4):125-128.
[8]鄭靜,華澤釗,徐根林,等.室內超聲波定位系統的構建與測試[J].上海理工大學學報,2007,29(6):553-561.
Stage chasing light design based on ultrasonic positioning
WANG Jun,XIE Zhi-guang,LV Dong-hang,HOU Gang
(College of Instrument Science and Electrical Engineering,Jilin University,Changchun 130021,China)
Due to a lot of heat of the stage lighting,one person cannot control the light to track the actor for a long time and bright lights bring great difficulty to the operator,so a device which can be controlled to track the actor automatically is urgently needed.Based on this,the paper describes the ultrasonic positioning principle,and then propose a stage chasing light system design based on STM32 microcontroller combined with wireless communication technology and ultrasonic technology.This ultrasonic positioning system is not limited to the stage tracking,and it can also be expanded to the scope of application to other project site.For example:it can be used for mine workers positioning to avoid the workers enter into unsafe areas for a mistake,and in the event of a mine,it can help rushing to the scene to save the victims of absenteeism life.
stage cha microcontroller;wireless communication technology;ultrasonic positioning technology
TN912.2
A
1674-6236(2016)04-0004-03
2015-04-02 稿件編號:201504020
國家級大學生創新實驗計劃基金項目(2014A65292)
王 君(1955—),男,山東乳山人,教授。研究方向:傳感器技術及應用。
猜你喜歡
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:47:32
鳳凰動漫(軍事大王)(2022年1期)2022-04-19 11:35:30
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電子設計工程(2015年15期)2015-02-27 12:07:30