基于CAN-bus總線的電動密集架控制系統設計
2016-09-13 09:13:15丁華峰商俊燕
電子設計工程 2016年5期
丁華峰,商俊燕
(常州輕工職業技術學院 江蘇 常州 213164)
基于CAN-bus總線的電動密集架控制系統設計
丁華峰,商俊燕
(常州輕工職業技術學院 江蘇 常州213164)
信息化時代背景下,智能電動密集架在現代檔案庫房日益普及,它結合了組合貨架和移動貨架的優點,真正實現了效率更高、空間更省,無序存放、有序管理。本文主要介紹一種基于高速CAN-bus總線的電動密集架控制系統,采用STM32處理器與CAN總線控制器TJA1050構建高速通信硬件平臺,相比傳統的RS-485接口通信速率更快,可靠性更高,響應更實時。
CAN-bus總線;智能電動密集架;STM32處理器;TJA1050
隨著電子信息技術的發展和成熟,智能化、信息化的倉庫管理系統越來越多的得到社會的認同。使用電動密集架是現代化倉儲管理技術的重要體現,他把組合貨架和移動貨架的優點結合到一塊,將傳統的手動密集架與電器控制系統相結合,并利用微處理器程序控制和電子傳動設備操縱密集架的移動列,同時加以一些智能檢測技術使檔案存儲和管理一體化。與傳統貨架相比,智能電動密集架效率更高,空間更省,列數可根據用戶需要定制,系統化管理便于對所存儲的物品、資料進行記錄,真正實現無序存放有序管理。
本文主要講述一種基于高速CAN-bus總線的電動密集架控制系統解決方案,與傳統電動密集架采用RS-485通信的系統相比,具有響應更快,可靠性更高等特點。
1 系統方案設計
依據國家檔案局《DA/T7-2003》直列式檔案密集架行業標準和圖書密集架國家標準《GB/T 13667.3-2003》,本設計智能電動密集架控制系統構成如圖1所示。
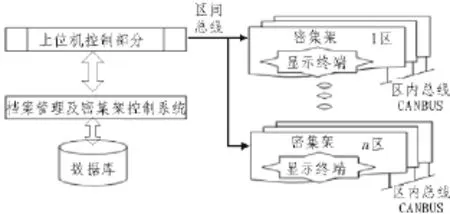
圖1 電動密集架系統構成圖Fig.1 Structure diagram of the electric shelves system
電動密集架系統包括:檔案管理及密集架控制系統(接數據庫)、上位機PC控制部分(帶控制軟件)、密集架區內系統(固定列控制和移動列控制)。本文主要講述CAN-bus總線構建區內總線,實現固定列與移動列之間的高速通信,從而實現高速實時的數據采集與控制。電動密集架區內系統構成如圖2所示。
電動密集架區內控制系統,主要分為兩部分:固定列控制器和移動列控制器。固定列控制器與上位機PC通過RS232接口相連接,可通過上位機軟件控制密集架開關列。固定列控制器與移動列控制器之間通過高速CAN-bus總線實時通訊,安裝時固定列可安裝在整個區的兩側,也可安裝在區的中間任意一列,根據列控制器撥碼開關,獲取固定列位置,然后根據上位機命令,計算并控制移動列的移動。
移動列控制器主要完成對輸入信號的檢測,并通過CAN-bus總線發送給固定列控制器,接收固定列控制器的控制命令,控制電機運動;顯示屏能顯示區列信息及運動狀態等,并提供觸摸按鍵實現開關列的脫機控制。
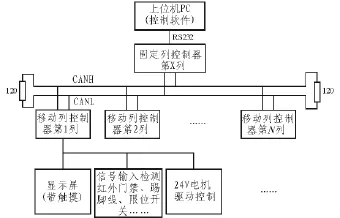
圖2 電動密集架區內控制系統構成圖Fig.2 Structure diagram of the electric shelves area control system
2 CAN協議與接口電路設計
2.1CAN協議分析
CAN(Controller Area Network)以其高可靠性、高性能、和實時性著稱,被廣泛應用于工業控制、軍事等眾多領域。CAN總線傳輸距離參,可達10 km,抗干擾能力出色,在惡劣環境下也能保證安全快速的傳輸[1]。
CAN協議分底層協議和高層協議兩部分:底層協議和高層協議。底層協議,主要描述了設備之間的通信方式[2],CAN的規范規定了OSI的物理層與數據鏈路層如表1所示。
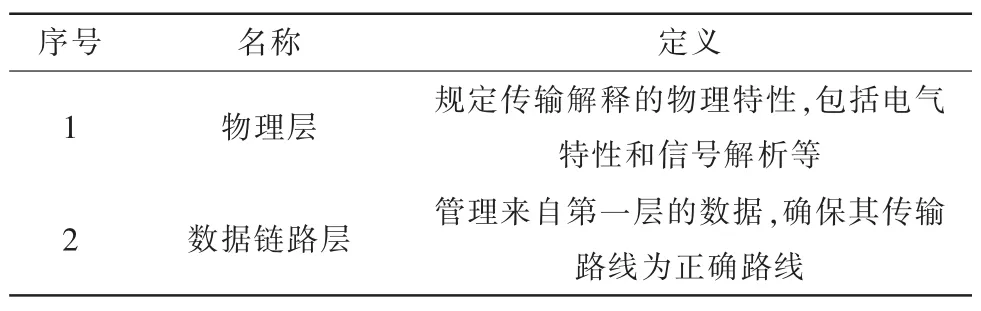
表1 OSI開放系統互聯模型低兩層Tab.1 The OSI Open Systems Interconnection model of low layer two
CAN可兼容多種通信介質,其中最常用的是雙絞線,接口有兩條線 (CANH和CANL),CAN收發接口的靜態電位約2.5 V,此時狀態為邏輯‘1’,也叫“隱形”,用CANH比CANL高表示邏輯‘0’。CAN的報文格式有兩種,不同之處其實就是識別符長度不同,具有11位識別符的幀稱為標準幀,而還有29位識別符的幀為擴展幀,CAN的高層協議就是對報文中的11/29位標識符、8字節數據的使用,在工業控制領域,CANOpen作為CAN總線一種開發的應用層協議,被廣泛的使用[3]。
2.2CAN總線接口電路
CAN總線接口電路選用STM32F103RBT6處理器內置CAN總線控制器,輔以CAN總線收發芯片TJA1050完成CAN通信[3]。電路如圖3所示。

圖3 CAN總線接口電路圖Fig.3 The CAN bus interface circuit
3 CAN通信軟件設計
系統軟件設計主要實現固定列控制器與移動列控制器之間的高速輪詢,在無控制命令時,輪詢獲取移動列控制器輸入信號等信息,有控制命令時發送指令,控制列的移動[4]。CAN的接收和發送數據是通過中斷實現的,每幀數據長度<= 8個字節,自定義通信協議當數據信息>8個字節時,可通過軟件拆分成若干個幀發送,接收端根據第一幀數據中的長度信息,自動完成數據的重組[5]。控制器主程序及CAN中斷程序流程圖如圖4和圖5所示。
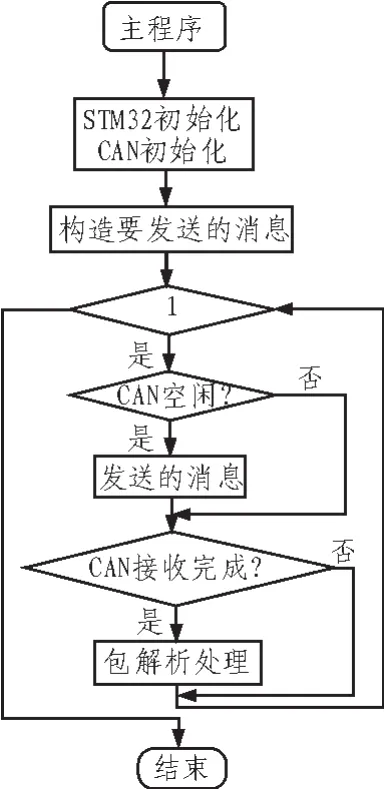
圖4 控制器CAN-bus通信主程序流程圖Fig.4 The main program flow chart of CAN-bus communication controller
4 結 論
相比傳統電動密集架RS-485通信方案,將高速CAN總線應用于電動密集架控制系統,大大提高了密集架移動列運行的響應速度[6],接線簡單,運行可靠。用STM32處理器與CAN總線收發器構建電動密集架主從式通訊,成本得到了有效的控制,同時解決了移動列多的情況向系統響應慢的問題,電動密集架系統性能得到了極大的提升。
[1]楊春杰,王曙光,杭紅波.CAN總線技術[M].北京:北京航空航天大學出版社,2010.
[2]劉立峰,廖力清,凌玉華.高低速CAN總線在汽車控制系統中的研究與應用[J].上海汽車,2005,9:26-28.
[3]王海燕,龍辛.基于STM32的CANopen通訊協議的實現[J].工業設計,2012,2:131-132.
[4]劉威龍,孫明磊,王頔,等.基于STM32的分布式步進電機控制系統設計[J].數字技術與應用,2012,3:12-14.
[5]XIA Ji-qiang,ZHANG Chuan-sen,BAI Rong-gang,et al. Real-time and reliability analysis of time-triggered CAN-bus [J].Chinese Journal of Aeronautics,2013,1:171-178.
[6]戴文俊,范鵬飛,凌有鑄,等.模糊自適應PID控制器在無刷直流電機控制系統中的應用研究[J].安徽工程大學學報,2012,27(1):64-67.
The design of electric shelves control system based on CAN-bus
DING Hua-feng,SHANG Jun-yan
(Changzhou Vocational Institute of Light Industry,Changzhou 213164,China)
Under the background of information,the intelligent electric shelves in the popularization of modern archives,which combines the advantages of the combination of mobile shelves and shelves,and realize the high efficiency,more space,storage disorder,order management.In this paper,mainly introduces a kind of high-speed CAN-bus control system based on electric serried shelf,Construction of high speed communication hardware platform with STM32 processor and CAN-bus controller TJA1050,which interface communication faster,higher reliability,better real time response than RS-485.
CAN-bus;smart electric shelves;STM32Processor;TJA1050
TN402
A
1674-6236(2016)05-0182-02
2015-04-16稿件編號:201504173
丁華峰(1980—),男,江蘇常州人,碩士,講師。研究方向:單片機應用系統設計、嵌入式系統設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17