基于STM32的四旋翼飛行器設計與實現
2016-09-14 09:17:48王麗丹李夢柯洪成昌江東風
電子設計工程 2016年2期
顏 平,王麗丹,李夢柯,洪成昌,江東風
(西南大學 重慶 400715)
基于STM32的四旋翼飛行器設計與實現
顏 平,王麗丹,李夢柯,洪成昌,江東風
(西南大學 重慶400715)
本四旋翼飛行器以STM32F103RCT6為核心控制器,通過硬件連接快速接收MPU6050模塊實時檢測的飛行器姿態數據,經過UpdataIMU算法得到對應的姿態角四元數,互補濾波后進行PID算法計算得出PWM波控制電機,得到穩定的飛行姿態。文中主要介紹了四旋翼飛行器的硬件設計、軟件設計以及調試方法,反復的試驗證明本方法能設計出穩定飛行的四旋翼飛行器。隨著研究的深入,四旋翼飛行器應用前景廣闊。
四旋翼飛行器;UpdataIMU算法;互補濾波;PID算法
近年來,四旋翼飛行器憑借優良的飛行性能和巨大的應用潛力日益得到關注。四旋翼飛行器融合了直升機與固定翼飛行器的優點,同時能在各種復雜地形飛行,現已發展為集軍用、商用、民用多位一體的實用工具,因此具有很高的科研價值。因此本項目結合現有的四旋翼飛行器的理論與技術基礎,選用常用的STM32控制芯片結合流行的姿態控制芯片,利用合適的算法自主設計四旋翼飛行器。通過對四旋翼飛行器主要介紹和對四旋翼工作模式與控制參數的研究,進行實際的控制算法和實物結合,從硬件搭建和軟件調試介紹了四旋翼飛行器飛行姿態控制的研發。
1 四旋翼的硬件設計
四旋翼飛行器的設計主要包括兩個部分:機架結構和飛行控制系統。機架構造是四旋翼的基礎,為了保證飛行器在飛行過程中能經歷更高的強度完成更多的功能,本項目選擇碳纖維材料做機架,碳纖維質輕,強度高不易破損;在拓展功能中輕巧的機身使得旋翼可以搭載更多其他設備完成攝像,探測等任務。飛行控制系統由主控制器、姿態傳感器、無線通信和電機驅動等部分組成。姿態傳感器用來測量四旋翼飛行器的飛行狀態信息 ,主控制器通過高速數模、模數轉換I/O口接收姿態傳感器反饋回來的狀態信息,并結合預定值經過算法得出最直接的四路輸出量PWM值控制電機轉速,調整飛行器的姿態,并不斷進行反饋調節,得到適當力矩達到穩定。整個四旋翼飛行器控制系統主要分為硬件連接和軟件控制兩個部分。
1.1主控模塊
本項目采用STM32開發板對系統進行控制,主控芯片STM32F103RCT6具有32位高精度高速度的浮點處理單元,72 MHz高速處理能力,112個高速I/O口,多達21個3×12-bit,1 μsA/D、D/A轉換通道,以及多路PWM輸出通道;它負責接收傳感器檢測到的姿態角速率等數據、三軸的線加速度,氣壓傳感器測得的高度和航向信息并結合控制算法和濾波處理[1]計算輸出控制量并不斷進行循環檢測和計算以達到系統的穩定性,并通過無線通信模塊與上位機進行數據的交換,實現數據交互和飛行姿態控制[2]。

圖1 硬件設計整體框圖Fig.1 Overall block diagram of the hardware design
主控模塊供電模塊采用線性元器件PTN78000WAH構成電壓轉換電路結合tps62160穩壓,為單片機其他模塊供電,發熱小,紋波小,綜合效能高
1.2傳感器模塊
由四旋翼飛行器的簡單物理模型可知,在一固定時刻,四旋翼的狀態由6個物理量來描述,包括在三維坐標中的3個位置量和沿3個軸的姿態量,這些姿態數據的采集則由MPU6050模塊來實現。慣性傳感器有兩種類型:陀螺儀和加速度計。陀螺儀起到測量四旋翼飛行器的角速率的作用。因此,精度和穩定性可作為陀螺儀選型的重要原則,MPU6050所測得的數據誤差較結合的陀螺儀和加速度計誤差更小、運用和控制更方便。MPU6050是三軸陀螺儀和三軸加速器的結合,MPU6050的角速度全格感測范圍設定為±250、±500等,可準確追蹤快速與慢速動作,傳輸可透過最高至400 kHz的IC。慣性導航中,導航參數會隨著傳感器的測量誤差積累而發散[3],另外為了更加準確,本四旋翼增加了三軸加速度計、GY-63氣壓傳感模塊和陀螺儀6D0F模塊與MPU6050所得數據進行校準,以期更好地控制飛行。
1.3無線通信模塊
為了實現四旋翼飛行器和地面控制中心之間的通信必須使用無線通信模塊。本項目采用nRF24L01單片機無線收發芯片,工作在2.4~2.5 GHz的ISM頻段的單片無線收發器芯片。無線收發模塊包括:頻率發生器、增強型“SchockBurst”模式控制器、功率放大器、晶體振蕩器、調制器和解調器,能較好地完成通信。也可以利用WIFI進行通信,通過電腦內置無線網絡協議IEEE802.11協議棧以及TCP/IP協議棧,同樣能夠實現電腦與WIFI芯片的無線數據傳輸,同時WIFI信息傳送數據速率可以達到600Mb,并且配置和使用也簡單,但是在手動控制飛行器的時候不如手持式無線終端靈活,但最終仍然能實現上位機對其的數據采集和實時操控。
1.4電機、電調控制模塊
本項目采用直接利用成品AL-ITW電調,控制無刷電機方案,實現了STM32輸出PWM脈沖控制電調,從而對電機達到線性控制目的。控制方式為主控芯片根據采集的姿態數據調整輸出PWM周期,最大油門值為2 ms高電平。
2 飛行控制器的軟件設計
軟件使用 keil,uvision4.1.0集成開發環境,工具鏈為RealViewMDK-ARM Version4.12,驅動采用官方的MPU6050驅動inv_mpu.c和inv_mpu_dmp_motion_driver.c。
本飛行控制器的軟件控制主要包括以下幾個方面。
1)STM32單片機獲取mpu6050傳感器的初始數據,通信方式采用I2C通信方式;
2)得到飛行器的實時姿態,濾波方式采用互補濾波;
3)與此同時,用HC06藍牙模塊接收到上位機發送的數據,解算得到期望姿態;
4)之后將實時姿態和期望姿態作差,差值送入PID閉環控制器。
控制過程如圖2所示。
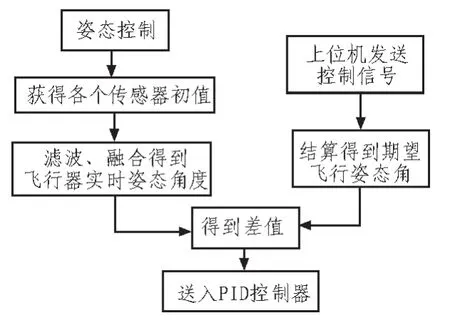
圖2 飛行控制器主要控制過程圖Fig.2 Flight controller main control process chart
2.1讀取mpu6050初值
根據mpu6050數據手冊的各寄存器地址,采用GPIO模擬I2C通信方式,讀取重力加速計和陀螺儀的各個分量。本飛行控制器傳感器采樣率設置為200 Hz;陀螺儀量程為±2 000°/s,加速計量程為±2g。量程不宜太大,量程越大取值越不準確。
2.2濾波和姿態融合
采用互補濾波,融合時,飛行器的瞬時運動情況很大程度上由陀螺儀的積分運算決定,陀螺儀產生的誤差由重力加速度計長時間累積不斷矯正,最終得到準確的機身姿態。
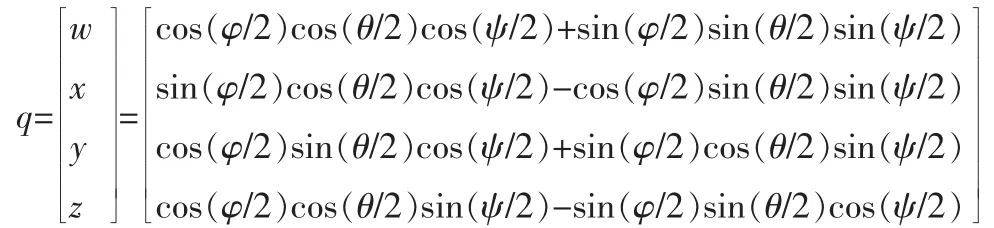
為了得到姿態角所對應的四元數,本控制器采用Madgwick提供的UpdateIMU算法[4],之后經過簡單運算將四元數轉換為實時歐拉角,轉換方式[5]如下:
首先定義四元數
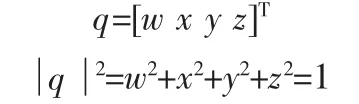
通過旋轉軸和繞該軸旋轉的角度可以構造一個四元數:
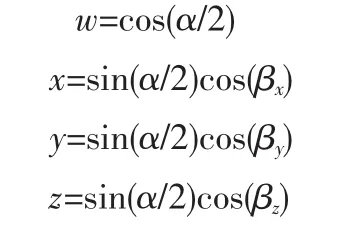
其中是繞旋轉軸旋轉的角度,cos(βx)、cos(βy)、cos(βz)為旋轉軸在x、y、z方向的分量(由此確定了旋轉軸)。歐拉角到四元數的轉換公式如下:
2.3獲取期望姿態
讓用戶介入控制,通過HC-06藍牙模塊接連到STM32的串口1,再無線連接到控制端,獲得控制端不斷發送的數據包,并實時更新期望姿態角。需要注意輸出的姿態角和實時姿態角方向是否一致以及數據包的校驗。
2.4PID算法控制
本飛行控制系統引入PID控制器來更好的糾正系統。
PID基本要素包括 “比例proportional”、“積分integral”、“微分derivative”,每一項完成不同的任務,對系統功能產生不同的影響。P代表控制系統的響應速度,P越大響應越快;I用來累積過去時間內的誤差,修正P無法達到的期望姿態值(靜差);D加強對機體變化的快速響應,對P有抑制作用。
2.5輸出PWM信號
完成PID計算后,通過STM32自帶的定時器調制輸出四路pwm信號,本控制器采用50 Hz的電調pwm,設置0.5~2.5 ms的高電平持續時間。
至此,一個基于stm32和mpu6050搭建的飛控系統已經實現。
3 系統調試與飛行測試
系統模型的建立通過數學模型模擬飛行器的飛行,但是系統模型并不能十分精確的展現飛行器的真實飛行狀況,理論分析所獲取的各類參數往往與實際參數會有些差錯,需要進一步通過對系統進行調試使飛行器達到最佳的飛行效果。本項目采用Matlab開發的的上位機程序控制四旋翼飛行,從而獲得適合于四旋翼飛行的最佳控制參數。
3.1開機檢測
1)電壓值檢測
四旋翼飛行器需要在一定的電壓范圍內才能保證其正常的飛行,當電池電壓低于11.3 V時,電動馬達驅動電壓過低,會使得飛行器不能夠正常飛行,在電池上安裝電壓報警器設備對電池電壓進行監控,調節報警電壓為11.3 V,當電池電壓低于設定值時,報警器被觸發響鈴,提醒及時充電。
2)超聲波檢測
利用主控計算機的GPIO端口讀取超聲波傳感器輸出的脈沖寬度,將其轉換為寬度。當寬度小于設定的初始值時,主控芯片會調節PWM的輸出,改變四旋翼飛行器原先的飛行狀態,從而達到避障功能。
3.2PID控制參數的設置

圖3 PID控制基本框圖Fig.3 PID control of the basic block diagram
通過MPU-6050傳回主控芯片的姿態數據結合PID算法對四旋翼飛行姿態進行控制,圖3為PID控制基本框圖。
其中error表示飛機各個姿態角和預設姿態角之間的偏差,送入上述框圖計算得到控制調整信號輸出給控制芯片編程PWM送出調整電機轉速進行姿態調整。
根據PID系統的結構圖,通過matlab搭建Simulink仿真,經過調試,得到以下參數取值表。
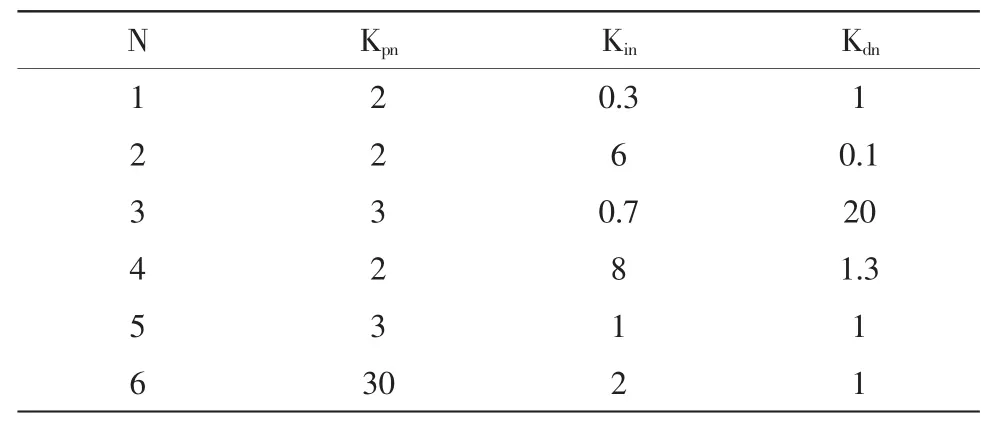
表1 PID仿真參數值Tab.1 PID simulation parameters
通過大量仿真實驗,當P=3,i=0.7,d=20時飛行器能夠保持穩定狀態飛行。
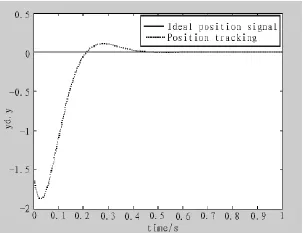
圖4 Matlab仿真圖Fig.4 Matlab simulation map
4 結束語
本項目結合四旋翼飛行器的器件選擇,硬件電路設計和控制系統程序實現等方面系統地給出了設計步驟和方法,經實驗證明本套方案能設計出一套能穩定起飛并且能在手持遙控器控制下平穩飛行的四旋翼。鑒于各方面的突出優勢,如今四旋翼飛行器在生活很多地方都可以看到應用,它是一種有巨大商業潛力和極寬應用范圍的技術,這項技術的研究能拓展更多的科研價值,在智能飛行、自主飛行方向的發展能更進一步。
[1]Hamel T,Mahony R,Lozano R,et al.Dynamic modeling and configuration stabilization for an X4-Flyer[C].15th Triennial World Congress,Barcelona,Spain,2002:665-670.
[2]Bouabdallah S.Design and control of quadrotors with applicationto autonomous fIying[D].Ecole Polytechnique Federale de Lausanne,2007.
[3]周權.四旋翼飛行平臺飛行控制和慣性導航研究 [D].南京:南京航空航天大學,2008.
[4]IMU[EB/OL].[Online]Available:http://developer.mbed.org/ cookbook/IMU(2015-10-3).
[5]Conversion between quaternions and Euler angles[EB/OL].Available:http://www.cnblogs.com/wqj1212/archive/2010/11/ 21/1883033.html(2015-10-3).
[6]代曉巍,李振興,趙麗莉.飛行器外測數據連續型野值的抽取剔除方法[J].電子設計工程,2015(12):68-70.
The design and achievement of quadrotor based on STM32
YAN Ping,WANG Li-dan,LI Meng-ke,HONG Cheng-chang,JIANG Dong-feng
(Southwest University,Chongqing 400715,China)
The main controller of this Quadrotor is STM32F103RCT6,and we can quickly acquire quadrotor’s attitude data through hardware connection between MPU6050 module and controller;Then we use UpdataIMU algorithm to convert original data to corresponding attitude angle quaternion,complementary filter will deal with those data.At last,through PID algorithm,there will be PWM output wave to adjust speed of the motors,so that we succeeded in a stable flight attitude.This paper describes the quadrotor’s hardware design,software design and debugging methods,from repeated tests,this method can design a stable quadrotor aircraft.With further research,quadrotor aircraft has a broad application prospects.
quadrotor;updataIMU algorithm;complementary filter;PID algorithm
TN99
A
1674-6236(2016)02-0187-03
2015-03-09稿件編號:201503121
國家級大學生創新訓練項目資助(201410635080)
顏 平(1993—),女,重慶人。研究方向:通信工程。