基于PID神經網絡的智能車追逐控制系統研究
2016-09-23 03:11:48張桐銘劉延飛趙鵬濤田琦
科技與創新 2016年15期
張桐銘+劉延飛+趙鵬濤+田琦
摘 要:針對智能車競賽中新提出的雙車追逐問題,提出了一種基于自適應控制的追逐速度控制系統,將PID神經網絡控制方法應用于智能車的調速系統中。PID神經網絡控制系統不依賴智能車的數學模型,能夠自適應地根據實際情況調整神經元的權值,最終優化了智能車速度的控制效果。測試結果表明,PID神經網絡控制器相比于傳統的PID控制器具有響應快、超調小、無靜態誤差等優點,明顯提高了智能車速度控制系統的性能。
關鍵詞:PID神經網絡;智能車;雙車追逐;速度控制
中圖分類號:TP183 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2016.15.013
智能車系統以迅猛發展的汽車電子為背景,涵蓋了自動控制、模式識別、傳感技術、電子、電氣、計算機、機械等多個學科,主要由路徑識別、轉角控制及車速控制等功能模塊組成。PID神經網絡(Proportion-Integral-Derivative Neural Network,PIDNN),是一種多層前向神經網絡,基于PIDNN的控制系統是一種基于連接機制的智能控制系統。與傳統的控制理論相比,PIDNN控制器對于復雜的環境和任務有更好的適應性。
雙車追逐,即兩輛智能車同時運行的行駛方式,兩輛智能車之間沒有有形的物理連接,要求兩輛車不能發生碰撞和接觸,且輛車要盡量靠近,以提高車輛運行的效率。在日常生活中,當道路較為擁擠時的車輛行駛就是類似的問題。因此,研究雙車追逐問題對于智能車輛的安全行駛有著重要的意義。
1 智能車設計
1.1 智能車總體設計
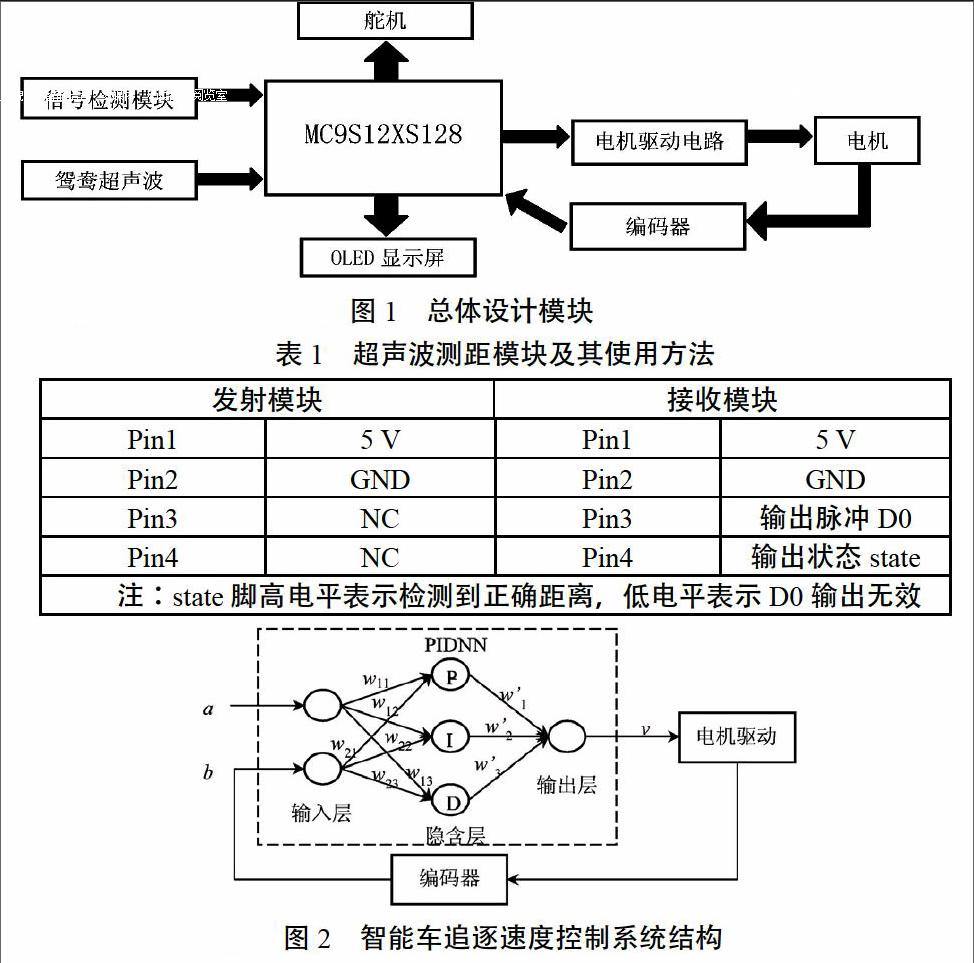
智能車前端安裝有磁信號傳感器,由其將采集的信號送至信號處理電路進行濾波、放大,之后單片機通過AD端口采樣,獲取路徑檢測模塊信息并計算分析,根據旋轉編碼器反饋回來的實際車速對電機進行控制。總體模塊設計如圖1所示。
1.2 編碼器測速裝置
編碼器、霍爾傳感器、光電傳感器、測速電機是常見的四種測速裝置。根據不同的測速精度要求,經過多次選型測試后,設計選用歐姆龍出品的200線編碼器測速。使用這種編碼器足夠滿足精度需求,并且輸出為數字接口,輸出測速脈沖,可供單片機采用,獲得實際速度值。
1.3 兩車通訊模塊
根據賽道情況,設計選擇采用的“鴛鴦”超聲波測距模塊如表1所示。該組傳感器分為發射和接收兩個模塊,前車搭載發射模塊,后車搭載接收模塊。檢測角度大于90°。兩車之間距離為d,發射和接受信號脈寬為w,則有:d=w×340 m/s,主要連接方式見表1.
2 追逐速度PIDNN控制系統設計
智能車主要由主板、單片機、傳感器、舵機、電源模塊、電機驅動等部分組成。電機控制為智能車追逐速度控制的實現方式。智能車電機轉速的快慢主要由單片機輸出的占空比大小決定。當超聲波測距模塊測出兩車距離較遠時,電機驅動信號的占空比增大,后方智能車加速;反之,當兩車距離較近時,電機驅動信號的占空比減小,后方智能車減速。電機從執行指令到響應輸出需要一定的時間,而且智能車本身又具有一定的慣性,使得小車在速度調解過程中存在一定的滯后。因此,PIDNN控制器作為一種超調小、無靜差、響應時間短的控制器,可以很好地解決以上問題。 2.1 追逐速度PIDNN控制系統的結構
在構成控制系統時,PIDNN和被控對象是一種串聯關系,PIDNN的輸入作為速度期望值和實際速度,PIDNN的輸出作為控制量傳遞給被控對象。智能車追逐速度控制系統如圖2所示。
PIDNN控制器是一個三層前向網絡,為2×3×1結構,它的輸入層有2個神經元,分別接收電機目標速度的給定值a和實際速度b;它的隱含層有3個神經元,分別為比例元P、積分元I和微分元D;輸出層完成隱含層神經元信息的綜合。網絡的輸出v作為控制量傳遞給電機驅動,智能車的實際速度b通過編碼器測出并反饋回神經網絡的輸入層。
2.2 PIDNN控制器的前向計算方法
PIDNN控制器的核心在于隱含層的狀態函數形式,下面主要介紹隱含層的狀態函數和輸出函數。
隱含層含有3個神經元,分別為比例元、積分元和微分元,它們各自的輸入總值均為:
隱含層各神經元的狀態函數分別為比例函數、積分函數和微分函數,用以實現傳統PID控制器中的比例、積分和微分環節的作用。
2.3 PIDNN控制器的反傳學習計算方法
追逐速度PIDNN控制器的反傳學習即BP(誤差反向傳播)學習算法,主要完成在線學習,從而修改網絡權值。
本設計中,網絡連接權重值的調整基于目標速度和實際速度的偏差。可將PIDNN控制器和被控對象看作一個整體,即一個具有更多層數的神經元網絡。網絡的最后一層對應于被控對象(電機驅動),是未知的,因此整體神經網絡的性能指標定義為:
3 實驗驗證
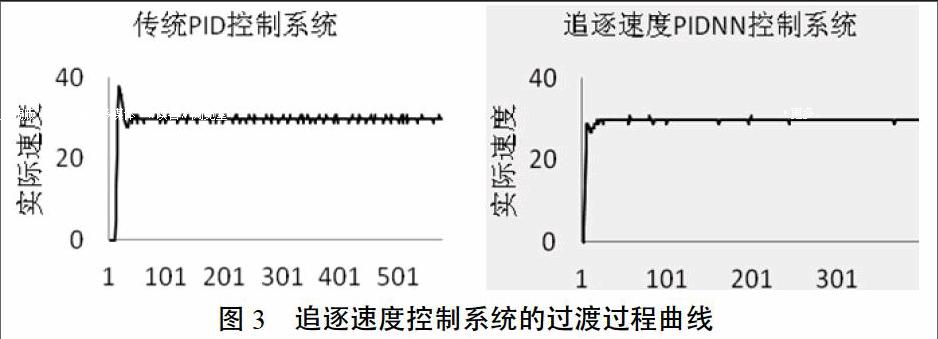
我們利用實際制作的智能車進行了對照實驗,圖3(左)是運用傳統PID控制器設計的追逐速度控制系統的過渡過程曲線,圖3(右)是運用PIDNN控制器設計的追逐速度控制系統的過渡過程曲線。
從圖3中可以看出,傳統PID控制器即使經過煩瑣的參數整定,系統輸出還存在很大超調,但經過PIDNN的自學習和調整,系統輸出響應超調小,靜差小,響應速度很快。
4 結論
本文根據PIDNN的控制原理,設計了一種基于PIDNN的智能車追逐速度控制系統,并結合功能描述,詳細地闡述了其硬件工作方式。經過周密的理論驗證,給出了追逐速度PIDNN控制系統的結構形式及計算方法。實驗表明,基于PID神經網絡的智能車追逐速度控制系統相比于傳統PID控制系統,具有更好的魯棒性、控制精度以及更好的控制效果,具有一定的推廣價值。
參考文獻
[1]鄭怡,王能才.改進的單神經元自適應PID控制算法在智能車速度控制系統中的研究與應用[J].自動化表,2015,185(3):98-99.
[2]趙國柱,趙悅如.用于智能車速度控制的PID程序設計[J].中國西部科技,2015,308(3):28-29.
[3]吳隆東,姚齊國.基于K60芯片的雙電磁車追逐運動的設計[J].中國水運,2015,11:72-73.
[4]盧萍,金朝永.基于PID神經元網絡的研究和改進[J].自動化儀表,2012,33(8):51-54.
[5]袁朝暉,張慧.多溫區電加熱爐的PID神經網絡控制[J].武漢理工大學學報,2002,24(3):21-23.
〔編輯:劉曉芳〕
