無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)研究與實(shí)踐
2016-09-23 03:32:20陳昶昊陳學(xué)江2胡小平鄭立巖3
導(dǎo)航與控制 2016年3期
陳昶昊,陳學(xué)江2,胡小平,鄭立巖3
(1.國防科技大學(xué)機(jī)電工程與自動化學(xué)院,長沙410073;2.陸軍航空兵學(xué)院航電和兵器工程系,北京101123;3.濰坊天翔航空工業(yè)有限公司,濰坊261000)
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)研究與實(shí)踐
陳昶昊1,陳學(xué)江2,胡小平1,鄭立巖3
(1.國防科技大學(xué)機(jī)電工程與自動化學(xué)院,長沙410073;2.陸軍航空兵學(xué)院航電和兵器工程系,北京101123;3.濰坊天翔航空工業(yè)有限公司,濰坊261000)
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)對于完成超視距偵察、監(jiān)控能力和打擊是非常重要的。本文分析了無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)的的基本體系結(jié)構(gòu)和功能模塊,研究了無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)的建模技術(shù)及其優(yōu)化算法,并在V750無人直升機(jī)上進(jìn)行了驗(yàn)證。
無人駕駛;直升機(jī);任務(wù)規(guī)劃系統(tǒng);飛行控制;自主控制
0 引言
高效能無人直升機(jī)系統(tǒng)的研制及其作戰(zhàn)使用離不開任務(wù)規(guī)劃系統(tǒng)的支持。無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)是一個(gè)無人在回路中的大型計(jì)算機(jī)系統(tǒng),它的主要任務(wù)是要根據(jù)無人直升機(jī)的數(shù)量及任務(wù)載荷的不同,對各架無人直升機(jī)進(jìn)行任務(wù)分配;根據(jù)無人直升機(jī)的飛行性能、機(jī)載任務(wù)設(shè)備的性能、無人機(jī)和地面系統(tǒng)的通信數(shù)據(jù)鏈、戰(zhàn)場電磁和氣象環(huán)境,以及地圖測繪系統(tǒng)、衛(wèi)星偵察系統(tǒng)和其他情報(bào)系統(tǒng)提供的戰(zhàn)區(qū)地圖資料、敵方防空系統(tǒng)部署情況等,為無人直升機(jī)規(guī)劃出安全系數(shù)最大,作戰(zhàn)效能(如干擾性能、偵察性能、突防概率等)最高的飛行航線;根據(jù)任務(wù)規(guī)劃系統(tǒng)的建模技術(shù)及其優(yōu)化算法編排出無人直升機(jī)在飛行過程中對各種事件應(yīng)該采取的動作程序,并制成相應(yīng)的數(shù)據(jù)庫和磁盤,輸入機(jī)載計(jì)算機(jī)。無人直升機(jī)起飛后則根據(jù)在計(jì)算機(jī)程序中編排的飛行動作進(jìn)行作戰(zhàn)飛行(或依次飛向目標(biāo))。
無人機(jī)任務(wù)規(guī)劃在我國沒有得到廣泛應(yīng)用,我國的許多戰(zhàn)術(shù)無人機(jī)至今還沒有裝備任務(wù)規(guī)劃系統(tǒng),在自動任務(wù)規(guī)劃方面理論和技術(shù)儲備較少。雖然在國內(nèi)對路徑規(guī)劃問題進(jìn)行過許多研究,發(fā)表了許多論文,但大多數(shù)的文獻(xiàn)僅僅提出了路徑規(guī)劃(路程最短、燃料消耗、損耗風(fēng)險(xiǎn)等)的計(jì)算方法,而路徑規(guī)劃僅僅描述了任務(wù)規(guī)劃過程的一部分。
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng),不僅是無人直升機(jī)作戰(zhàn)性能的倍增器,而且是無人直升機(jī)武器系統(tǒng)的重要組成部分,也是無人直升機(jī)武器控制系統(tǒng)的地面設(shè)施(地面控制站)。在無人直升機(jī)研制階段,無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)對于協(xié)調(diào)無人機(jī)各分系統(tǒng)的戰(zhàn)術(shù)/技術(shù)性能,發(fā)揮無人直升機(jī)的綜合效能起著十分重要的作用。在無人直升機(jī)作戰(zhàn)使用過程中,無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)起著領(lǐng)航員的作用,同時(shí)代替飛行員對無人直升機(jī)進(jìn)行高層控制、決策與管理。另外無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)作為無人直升機(jī)武器系統(tǒng)的作戰(zhàn)使用軟件,對于充分發(fā)揮無人直升機(jī)系統(tǒng)的作戰(zhàn)性能具有重要作用。可以說,無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)在無人直升機(jī)系統(tǒng)研制和作戰(zhàn)使用的結(jié)合上發(fā)揮著十分重要而獨(dú)特的作用。
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)的目的是根據(jù)無人直升機(jī)任務(wù)載荷、無人直升機(jī)的數(shù)量及作戰(zhàn)任務(wù)的不同,對各架無人直升機(jī)進(jìn)行合理的任務(wù)分配,以保證完成任務(wù)的時(shí)間,并且總的油耗及威脅最小。從時(shí)間上來說:無人直升機(jī)任務(wù)規(guī)劃分為預(yù)先規(guī)劃和實(shí)時(shí)規(guī)劃。預(yù)先規(guī)劃是在無人直升機(jī)執(zhí)行任務(wù)前,由地面控制站制定的,主要是綜合任務(wù)要求、地形環(huán)境和無人直升機(jī)任務(wù)載荷等因素預(yù)先進(jìn)行規(guī)劃;實(shí)時(shí)規(guī)劃是在無人直升機(jī)飛行過程中,根據(jù)實(shí)際的飛行情況、環(huán)境和戰(zhàn)場出現(xiàn)的新威脅分布對先前規(guī)劃進(jìn)行修改,因此又叫重規(guī)劃。從層次功能上來說,無人直升機(jī)任務(wù)規(guī)劃可包含航路規(guī)劃、任務(wù)載荷規(guī)劃、數(shù)據(jù)鏈路規(guī)劃和系統(tǒng)保障與應(yīng)急預(yù)案規(guī)劃等。本文研究的無人直升機(jī)任務(wù)規(guī)劃研究的重點(diǎn)是任務(wù)分配優(yōu)化及航路規(guī)劃。無人直升機(jī)任務(wù)規(guī)劃實(shí)現(xiàn)無人直升機(jī)種類、數(shù)量等資源的實(shí)時(shí)、動態(tài)合理調(diào)配,以便提高無人直升機(jī)偵察、決策、打擊、評估等的時(shí)效性。
1 任務(wù)規(guī)劃系統(tǒng)的基本功能和結(jié)構(gòu)
1.1任務(wù)規(guī)劃系統(tǒng)的基本功能
在無人直升機(jī)戰(zhàn)術(shù)控制系統(tǒng)中,任務(wù)規(guī)劃系統(tǒng)是實(shí)現(xiàn)無人機(jī)控制決策的核心部分。任務(wù)規(guī)劃系統(tǒng)包括實(shí)時(shí)的戰(zhàn)術(shù)任務(wù)控制和非實(shí)時(shí)的作戰(zhàn)任務(wù)規(guī)劃兩部分功能。
其中,非實(shí)時(shí)功能包括:飛行前的戰(zhàn)場數(shù)據(jù)處理、任務(wù)計(jì)劃編制(包括空域管制計(jì)劃、航路計(jì)劃、載荷計(jì)劃、通信配置計(jì)劃、控制權(quán)計(jì)劃等)、任務(wù)推演評估、任務(wù)計(jì)劃輸出,以及飛行過程中的任務(wù)監(jiān)視和動態(tài)任務(wù)規(guī)劃等。實(shí)時(shí)功能主要是監(jiān)視和控制任務(wù)計(jì)劃的執(zhí)行,包括系統(tǒng)自檢監(jiān)視、飛行器狀態(tài)監(jiān)視、任務(wù)狀態(tài)監(jiān)視、戰(zhàn)場情報(bào)態(tài)勢顯示、交互控制、飛行任務(wù)控制、載荷控制、授權(quán)控制以及任務(wù)執(zhí)行評估等。具體包括:
1)任務(wù)分配功能。通過任務(wù)規(guī)劃系統(tǒng)在多任務(wù)、多目標(biāo)及多無人直升機(jī)之間進(jìn)行合理規(guī)劃,充分考慮無人直升機(jī)載荷及其性能的不同,合理調(diào)配無人直升機(jī)及其載荷資源,實(shí)現(xiàn)時(shí)間及代價(jià)最小化,并完成既定任務(wù)。
2)航路規(guī)劃功能。制定無人直升機(jī)的起飛、降落、接近監(jiān)測點(diǎn)、偵察監(jiān)測區(qū)域、離開監(jiān)測點(diǎn)、返航及應(yīng)急飛行等。
3)仿真演示功能。主要包括無人直升機(jī)飛行仿真演示、武器威脅仿真演示、偵察效果演示。
1.2任務(wù)規(guī)劃系統(tǒng)的結(jié)構(gòu)
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)由任務(wù)規(guī)劃站(內(nèi)核)、規(guī)劃算法組件、任務(wù)推演評估子系統(tǒng)以及多個(gè)無直升人機(jī)控制臺等組成。如圖1所示,每個(gè)控制臺對1~4架無人直升機(jī)進(jìn)行遠(yuǎn)程監(jiān)視、控制和管理。
控制臺主要承擔(dān)系統(tǒng)的實(shí)時(shí)監(jiān)視和控制任務(wù)計(jì)劃執(zhí)行的功能,包括系統(tǒng)自檢監(jiān)視、飛行器狀態(tài)監(jiān)視、任務(wù)設(shè)備狀態(tài)監(jiān)視、戰(zhàn)場情報(bào)態(tài)勢顯示、交互控制、飛行任務(wù)控制、載荷控制、授權(quán)控制以及任務(wù)執(zhí)行評估等。
任務(wù)規(guī)劃站是任務(wù)系統(tǒng)的核心,與具體的無人直升機(jī)無關(guān),主要承擔(dān)非實(shí)時(shí)規(guī)劃決策功能,包括任務(wù)規(guī)劃系統(tǒng)的基本輸入/輸出、數(shù)據(jù)庫服務(wù)器、戰(zhàn)場數(shù)據(jù)處理、任務(wù)管理、任務(wù)計(jì)劃編制、任務(wù)監(jiān)視以及動態(tài)任務(wù)規(guī)劃等。
規(guī)劃算法組件是按任務(wù)規(guī)劃站要求的算法組件規(guī)范封裝的,是特定的飛行器、任務(wù)設(shè)備相關(guān)的規(guī)劃算法程序(比如V750無人直升機(jī)、分布式干擾型、反輻射型、“長箭”等各種無人機(jī)的規(guī)劃算法)。規(guī)劃算法組件可以根據(jù)任務(wù)需要選擇和加載,由規(guī)劃站的任務(wù)管理模塊協(xié)調(diào)運(yùn)行。
任務(wù)推演評估是無人機(jī)任務(wù)規(guī)劃系統(tǒng)的可選功能。任務(wù)推演評估子系統(tǒng)采用交互仿真和可視化技術(shù)對任務(wù)規(guī)劃站提供的無人機(jī)作戰(zhàn)任務(wù)計(jì)劃進(jìn)行仿真推演,模擬和展示無人機(jī)作戰(zhàn)任務(wù)計(jì)劃的預(yù)期動態(tài)效果,便于指戰(zhàn)人員了解和評估任務(wù)計(jì)劃的效能。
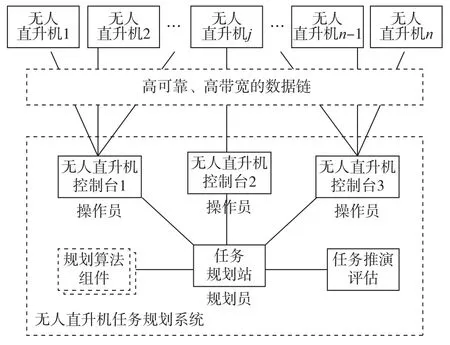
圖1 無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)的結(jié)構(gòu)Fig.1 The organization for mission planning system of pilotless helicopter
2 任務(wù)規(guī)劃系統(tǒng)的設(shè)計(jì)
無人直升機(jī)的通用任務(wù)規(guī)劃系統(tǒng)技術(shù)方案和主要技術(shù)途徑包括以下幾個(gè)部分:
(1)任務(wù)規(guī)劃站(內(nèi)核)技術(shù)方案及實(shí)現(xiàn)方法
①任務(wù)管理模塊
任務(wù)管理是任務(wù)規(guī)劃過程的協(xié)調(diào)控制層,主要對任務(wù)規(guī)劃過程進(jìn)行協(xié)調(diào)和控制,承擔(dān)了數(shù)據(jù)維護(hù)、運(yùn)行協(xié)調(diào)和資源配置等職責(zé)。任務(wù)管理的引入,降低了任務(wù)規(guī)劃過程的復(fù)雜程度,使得若干局部功能的模塊能夠合作起來共同完成一項(xiàng)復(fù)雜的任務(wù)。
②分布計(jì)算節(jié)點(diǎn)管理
目前的分布計(jì)算管理DCM軟件包括節(jié)點(diǎn)管理和分布式計(jì)算環(huán)境監(jiān)控兩部分,采用基于XML的報(bào)文和公用廣播機(jī)制進(jìn)行協(xié)作。
③任務(wù)執(zhí)行評估
任務(wù)監(jiān)控模塊負(fù)責(zé)監(jiān)視當(dāng)前任務(wù)規(guī)劃的執(zhí)行進(jìn)展并評估系統(tǒng)成功執(zhí)行當(dāng)前規(guī)劃的能力,監(jiān)視當(dāng)前進(jìn)行重新規(guī)劃所需事件的狀態(tài)(系統(tǒng)或任務(wù)環(huán)境的狀態(tài)變化、任務(wù)目標(biāo)或約束條件的改變),通過選擇合適的規(guī)劃算法以及定義算法的輸入來決定重新規(guī)劃的種類等。
④任務(wù)重規(guī)劃
在任務(wù)執(zhí)行過程中,下列因素或事件都可能導(dǎo)致無人直升機(jī)任務(wù)重規(guī)劃:作戰(zhàn)方案更改、態(tài)勢變化影響原任務(wù)計(jì)劃的執(zhí)行、任務(wù)評估認(rèn)為系統(tǒng)執(zhí)行當(dāng)前任務(wù)計(jì)劃的能力不足、突發(fā)威脅危害原任務(wù)計(jì)劃的執(zhí)行等。
重規(guī)劃算法根據(jù)事件狀態(tài)的變化進(jìn)行動態(tài)任務(wù)規(guī)劃,使無人機(jī)按照新的航線及任務(wù)特征完成新任務(wù),或根據(jù)地面指揮系統(tǒng)的指令,使其在空中調(diào)整攻擊任務(wù),并進(jìn)行二次目標(biāo)裝訂。在無人機(jī)上事先可裝訂多個(gè)目標(biāo)區(qū),且根據(jù)地基系統(tǒng)的指令,在飛行中更改目標(biāo)區(qū)。在目標(biāo)區(qū)發(fā)生改變時(shí),動態(tài)生成飛行航路和任務(wù)特征,并動態(tài)調(diào)整飛行策略和飛行航線。
(2)無人直升機(jī)控制臺技術(shù)方案和實(shí)現(xiàn)方法
無人直升機(jī)控制臺監(jiān)控一架或多架無人直升機(jī),對所管轄的無人直升機(jī)的系統(tǒng)狀態(tài)和載荷進(jìn)行監(jiān)控,監(jiān)視任務(wù)計(jì)劃的執(zhí)行情況,掌握局部戰(zhàn)場態(tài)勢,在受限的情況下通過動態(tài)任務(wù)重分配對無人直升機(jī)任務(wù)計(jì)劃進(jìn)行調(diào)整,如圖2所示。
任務(wù)規(guī)劃單元制定任務(wù)計(jì)劃,并分發(fā)給參與作戰(zhàn)行動的相關(guān)控制站。無人直升機(jī)在正常情況下將按照預(yù)先給定的任務(wù)計(jì)劃進(jìn)行飛行,當(dāng)飛行中的環(huán)境條件超出了預(yù)先給出的使用條件時(shí),緊急情況下,為了縮短響應(yīng)時(shí)間、提高無人直升機(jī)的高速性和高機(jī)動性,無人機(jī)控制臺通過動態(tài)任務(wù)重分配對無人機(jī)進(jìn)行調(diào)整,必要時(shí)手動控制無人機(jī)。
①控制臺系統(tǒng)的設(shè)計(jì)考慮下列原則
最大程度地采用通用硬件、軟件支持不同的無人直升機(jī)和載荷;在控制臺設(shè)備配置之間最大程度地提供通用性,最小程度地配裝無人直升機(jī)飛行關(guān)鍵硬件軟件;控制臺系統(tǒng)最小程度影響無人直升機(jī)及載荷改進(jìn)與升級,規(guī)劃站系統(tǒng)升級與改進(jìn)對控制臺系統(tǒng)的影響最小化。
②飛行器狀態(tài)監(jiān)視
在無人機(jī)任務(wù)執(zhí)行過程中,對無人直升機(jī)的各種狀態(tài)指標(biāo)的監(jiān)視,包括飛行器飛行狀態(tài)、飛行速度、燃油余量、航程等。飛行器狀態(tài)信息可以通過儀表板顯示。操作員根據(jù)所獲反映工作性能的信息,確定無人直升機(jī)及其載荷是否正常工作,對可能出現(xiàn)的異常和故障進(jìn)行早期診斷、預(yù)警,為提供應(yīng)急處理建議提供依據(jù)。
③任務(wù)狀態(tài)監(jiān)視
任務(wù)狀態(tài)監(jiān)視的目的是了解無人直升機(jī)任務(wù)執(zhí)行情況。控制臺監(jiān)控的數(shù)架無人直升機(jī)中的一架,直接以圖形方式動態(tài)刷新顯示,操作員可以方便地在數(shù)架無人直升機(jī)之間進(jìn)行切換,可以簡單查詢?nèi)蝿?wù)狀態(tài)的相關(guān)信息,及時(shí)掌握任務(wù)執(zhí)行情況,為緊急情況下的動態(tài)任務(wù)調(diào)整提供依據(jù)。
④戰(zhàn)場情報(bào)態(tài)勢顯示
戰(zhàn)場情報(bào)態(tài)勢顯示和任務(wù)狀態(tài)顯示的界面類似,不同的是戰(zhàn)場情報(bào)態(tài)勢顯示界面中信息量更多。將更多的態(tài)勢情報(bào)標(biāo)繪在界面上,可展現(xiàn)整個(gè)編隊(duì)的飛行態(tài)勢,并顯示諸如威脅、氣象等情報(bào)。操作員可以查詢編隊(duì)中其他無人直升機(jī)的狀態(tài)信息。
⑤任務(wù)執(zhí)行評估
通過對任務(wù)計(jì)劃、平臺能力、系統(tǒng)狀態(tài)、監(jiān)視異常信息的分析,任務(wù)執(zhí)行評估模塊估計(jì)當(dāng)前是否能夠完成任務(wù)計(jì)劃。任務(wù)執(zhí)行評估模塊集成在戰(zhàn)術(shù)任務(wù)控制操作環(huán)境中,如圖3所示。
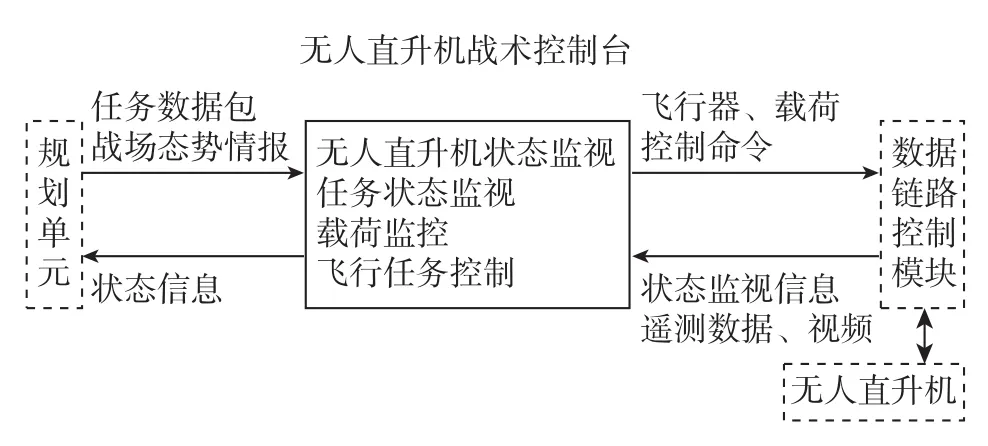
圖2 無人直升機(jī)戰(zhàn)術(shù)控制臺系統(tǒng)Fig.2 The tactics console system of the pilotless helicopter
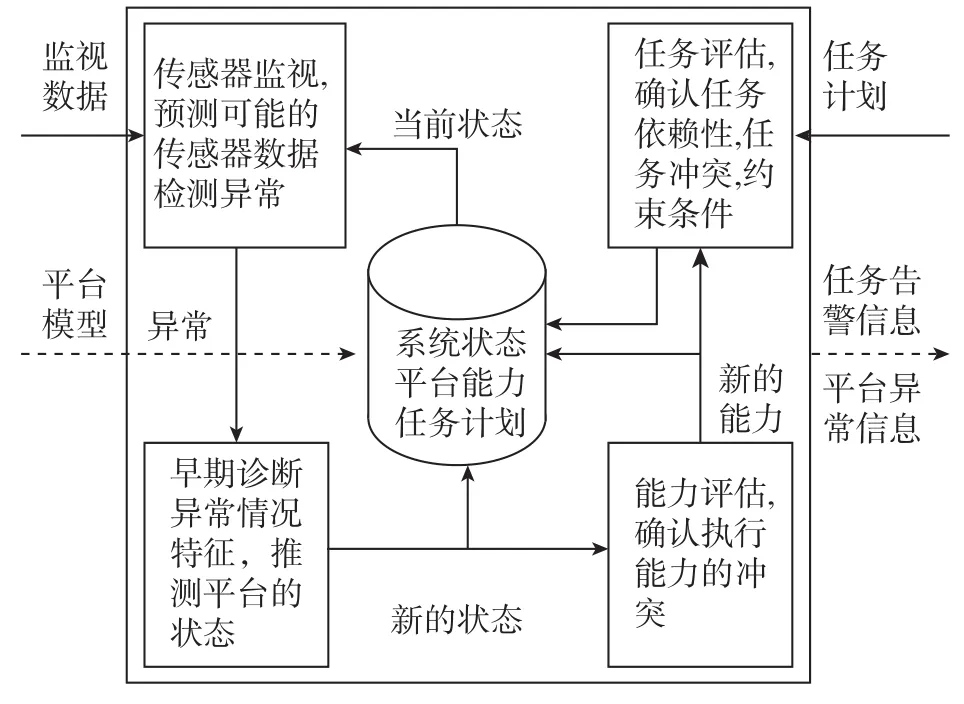
圖3 任務(wù)執(zhí)行評估的信息處理流程示意圖Fig.3 The information processing flow chart of mission evaluation of perform
對于突發(fā)情況,任務(wù)執(zhí)行評估可以及時(shí)處理,提供評估信息,操作員可以根據(jù)監(jiān)視信息和評估意見進(jìn)行進(jìn)一步操作。
(3)任務(wù)推演評估模塊技術(shù)方案
任務(wù)推演評估模塊,在作戰(zhàn)任務(wù)準(zhǔn)備階段,對規(guī)劃結(jié)果進(jìn)行可視化仿真,進(jìn)行任務(wù)計(jì)劃和攻擊過程的可行性評估;在攻擊過程完成后,對任務(wù)執(zhí)行過程進(jìn)行仿真重演,給出任務(wù)執(zhí)行評估報(bào)告。任務(wù)推演實(shí)現(xiàn)飛行航跡和攻擊過程的可行性評估,如圖4所示。
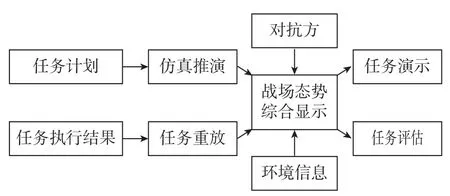
圖4 任務(wù)推演與評估模塊的設(shè)計(jì)方案Fig.4 The design project of mission deduce and evaluation module
任務(wù)推演與評估模塊通過數(shù)字地圖和虛擬現(xiàn)實(shí)技術(shù)模擬顯示多種比例尺無人直升機(jī)運(yùn)行態(tài)勢圖,且能模擬出形象直觀的三維地貌;既可描繪某一作戰(zhàn)空間或局部地域,又可顯示整個(gè)戰(zhàn)場的廣大地區(qū);既可模擬顯示地形情況,還可顯示氣候氣象環(huán)境,從而提供與實(shí)際近似一致的作戰(zhàn)空間。通過演示復(fù)雜的交戰(zhàn)態(tài)勢、電子對抗結(jié)果、戰(zhàn)場信息搜集、傳遞與處理的過程,為操作人員和指揮員直觀地判斷無人直升機(jī)的任務(wù)效能提供一個(gè)生動、形象、逼真的環(huán)境。
①戰(zhàn)場仿真可視化系統(tǒng)結(jié)構(gòu)
戰(zhàn)場仿真可視化軟件的主要目標(biāo)是為作戰(zhàn)任務(wù)和飛行計(jì)劃排演提供可視化環(huán)境,模擬和展示作戰(zhàn)任務(wù)計(jì)劃的預(yù)期動態(tài)效果,利用多源傳感器信息重構(gòu)動態(tài)作戰(zhàn)場景,形成能夠有效地輔助任務(wù)計(jì)劃和決策管理的綜合信息視圖。
軟件系統(tǒng)在設(shè)計(jì)上集成了地理信息系統(tǒng)、分布式交互仿真、并行處理、可視化等領(lǐng)域的先進(jìn)技術(shù),旨在建立基于低成本微機(jī)系統(tǒng)的滿足實(shí)時(shí)性要求的戰(zhàn)場仿真可視化環(huán)境。
戰(zhàn)場仿真可視化軟件采用分布式的體系結(jié)構(gòu),如圖5所示。
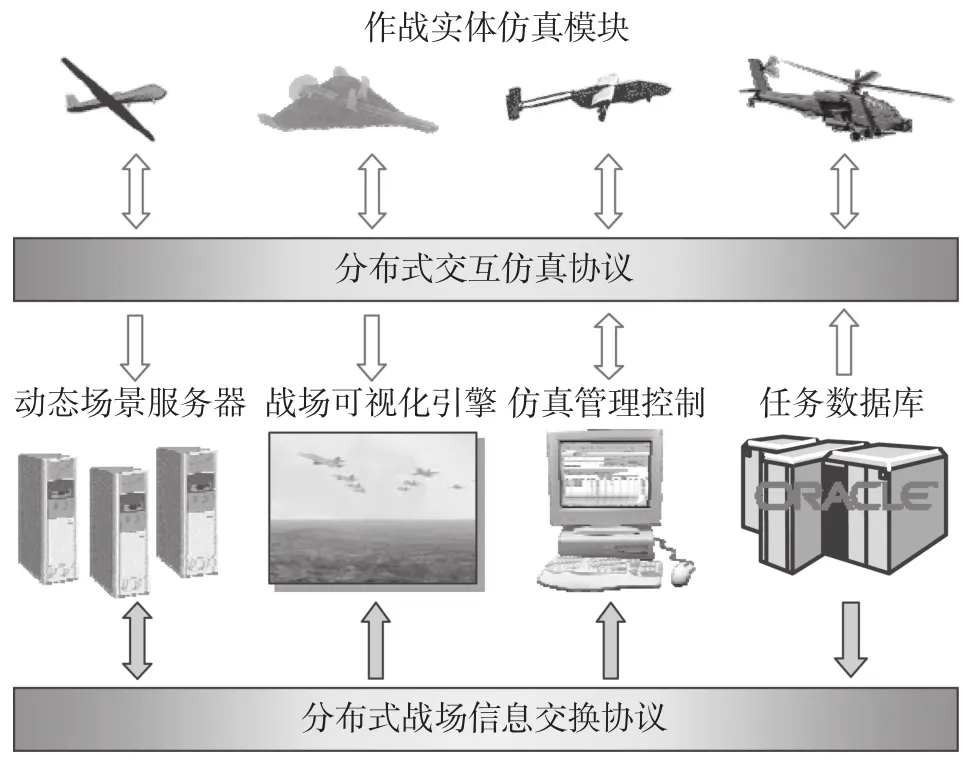
圖5 戰(zhàn)場仿真可視化軟件的組成結(jié)構(gòu)示意圖Fig.5 The software consisting of battlefield simulation visualization
本系統(tǒng)基于分布式交互仿真體系結(jié)構(gòu),采用分布式并行構(gòu)架。采用分布式交互仿真協(xié)議(HLA)作為仿真應(yīng)用模塊的互連標(biāo)準(zhǔn),具有良好的開放性、可擴(kuò)展、可伸縮和可重用性。
從某種意義上講,戰(zhàn)場可視化子系統(tǒng)采用了三層體系結(jié)構(gòu),任務(wù)數(shù)據(jù)庫為數(shù)據(jù)庫服務(wù)器層、戰(zhàn)場可視化引擎為客戶層,而動態(tài)場景服務(wù)器為應(yīng)用邏輯服務(wù)器層。采用三層體系結(jié)構(gòu)的戰(zhàn)場可視化子系統(tǒng)便于實(shí)行分布式并行處理,并且充分利用了數(shù)據(jù)庫服務(wù)器、應(yīng)用邏輯服務(wù)器以及可視化工作站各自的計(jì)算資源,使得在低成本計(jì)算機(jī)平臺上實(shí)現(xiàn)飛行任務(wù)的可視化和大范圍、高精度、動態(tài)戰(zhàn)場環(huán)境的可視化成為可能。
②實(shí)時(shí)動態(tài)場景生成
本系統(tǒng)提出了實(shí)時(shí)動態(tài)場景生成的概念。與一般的專業(yè)可視化軟件不同,這里并沒有采用所謂的場景模型預(yù)生成手段,因?yàn)槟壳暗淖鲬?zhàn)場景是大范圍、高精度、多實(shí)體、動態(tài)的,“預(yù)生成”在通過空間換時(shí)間的同時(shí)產(chǎn)生巨大的信息膨脹,從而對硬件平臺提出極高的要求。
動態(tài)場景生成的實(shí)時(shí)性需要通過多方面的技術(shù)加以保證,場景預(yù)測是其中的關(guān)鍵技術(shù)之一。對未來的場景序列得益于分布式交互仿真的航位推算技術(shù)。如前所述,動態(tài)場景服務(wù)器以分布式交互仿真應(yīng)用的方式連接仿真環(huán)境,通過HLA標(biāo)準(zhǔn)技術(shù)獲取各運(yùn)動實(shí)體的狀態(tài),結(jié)合實(shí)體運(yùn)動規(guī)律方面的知識就可能推算出運(yùn)動實(shí)體未來的狀態(tài)。依據(jù)預(yù)測信息以及從任務(wù)數(shù)據(jù)庫獲取的空間信息和其他模型素材,從而動態(tài)地建立戰(zhàn)場可視化模型。
戰(zhàn)場可視化引擎從分布式交互仿真環(huán)境接收運(yùn)動實(shí)體的狀態(tài)信息以及戰(zhàn)場環(huán)境的各種情報(bào),以此驅(qū)動三維場景。一個(gè)有效的大范圍動態(tài)場景可視化引擎必然面臨場景調(diào)度和控制的問題。
虛擬戰(zhàn)場模型的可視化是利用平臺提供的渲染功能(如OpenGL)實(shí)現(xiàn)的,其中的工作不僅包括三維幾何模型的渲染,還包括粒子系統(tǒng)特效、仿真對象的部件控制。分布式交互仿真環(huán)境提供的關(guān)于仿真對象(如各種武器單元)的運(yùn)動狀態(tài)是整體上的,并未給出其中的運(yùn)動部件的實(shí)際狀態(tài)。場景渲染過程中需要計(jì)算仿真對象三維模型部件的姿態(tài)。
③基本系統(tǒng)軟硬件配置
基本型系統(tǒng)以在低成本微機(jī)平臺上實(shí)現(xiàn)超低空無人直升機(jī)的飛行航跡可視化功能為目標(biāo)。
主要功能模塊由動態(tài)場景生成、飛行仿真軟件、三維飛行瀏覽、近方空情圖板、空間數(shù)據(jù)庫、航路交互仿真模塊構(gòu)成,如圖6所示。
3 V750 無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)建模及優(yōu)化算法驗(yàn)證
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng),在目前復(fù)雜多變的作戰(zhàn)任務(wù)下,需要多無人直升機(jī)協(xié)同作戰(zhàn),因此多無人機(jī)的調(diào)配及任務(wù)規(guī)劃成為一個(gè)熱門問題,其建模及優(yōu)化算法在國內(nèi)外都進(jìn)行了廣泛研究。較為簡單的,可以用線性規(guī)劃、動態(tài)網(wǎng)絡(luò)流的方式進(jìn)行建模。
目前應(yīng)用較為熱門的模型,有帶時(shí)間窗和容量約束的車輛路徑問題模型(CVRPTW),其被廣泛地應(yīng)用于美軍的 “全球鷹”無人機(jī)和 “捕食者”無人機(jī)的任務(wù)規(guī)劃建模中。車輛路徑問題考慮的是從一個(gè)或多個(gè)中心點(diǎn)出發(fā),將貨物送到指定的客戶處,并回到中心點(diǎn),其中客戶的需求和位置隨機(jī)。無人機(jī)的任務(wù)規(guī)劃可以抽象類比為這樣的簡單車輛路徑問題,為無人機(jī)的目標(biāo)分配任務(wù)和規(guī)劃路徑。除此之外,給定一系列約束條件,如時(shí)間窗、容量約束、相容約束和優(yōu)先約束等。為求解此類問題,可以采用遺傳算法和模擬退火算法等。
國內(nèi)的有多無人飛行器(Unmanned Combat Aerial Vehicle,UCAV)協(xié)同任務(wù)分配模型,該模型的目標(biāo)是使整個(gè)作戰(zhàn)單元中的無人直升機(jī)的整體作戰(zhàn)績效最優(yōu)化,而評價(jià)績效最優(yōu)化的性能指標(biāo)主要包括,作戰(zhàn)目標(biāo)區(qū)的任務(wù)達(dá)成狀況、作戰(zhàn)單元內(nèi)無人直升機(jī)的損耗狀況及完成作戰(zhàn)任務(wù)所需的時(shí)間狀況等。這樣建立的模型較為復(fù)雜,需要轉(zhuǎn)化為較少約束的模型,降低求解規(guī)模。為求解此類問題,國內(nèi)科研院所進(jìn)行了大量研究,具有代表性的有遺傳算法、蟻群算法、基于整數(shù)規(guī)劃的優(yōu)化搜索算法、基于合同網(wǎng)的時(shí)序任務(wù)分配算法、粒子群優(yōu)化算法等。
V750無人直升機(jī)系統(tǒng)是我國起飛重量和任務(wù)載荷能力最大的中型無人直升機(jī)系統(tǒng),其采用具有FAA適航認(rèn)證的成熟直升機(jī)平臺,加裝先進(jìn)的飛行自動控制系統(tǒng)、數(shù)據(jù)鏈系統(tǒng)和適用的任務(wù)載荷系統(tǒng)。
V750無人直升機(jī)飛行控制與管理系統(tǒng)采用雙余度配置,通過完善的自監(jiān)控措施提高安全性和任務(wù)可靠性;飛控計(jì)算機(jī)采用串行背板總線技術(shù),實(shí)現(xiàn)信息共享,如圖7和圖8所示。該系統(tǒng)用于穩(wěn)定無人直升機(jī)的姿態(tài)、速度、高度和航跡,完成從起飛到著陸飛行全過程中的導(dǎo)航、制導(dǎo)、任務(wù)載荷系統(tǒng)控制、信息傳輸與存儲的控制管理,并實(shí)現(xiàn)對發(fā)動機(jī)、電氣設(shè)備及任務(wù)設(shè)備的監(jiān)控與管理。系統(tǒng)支持外控、混控和程控三種模式,可以實(shí)現(xiàn)操作手人工控制以及執(zhí)行設(shè)定程序的自動控制。由于該系統(tǒng)地面檢測和維護(hù)系統(tǒng)功能完備,可以大大減少維護(hù)時(shí)間。
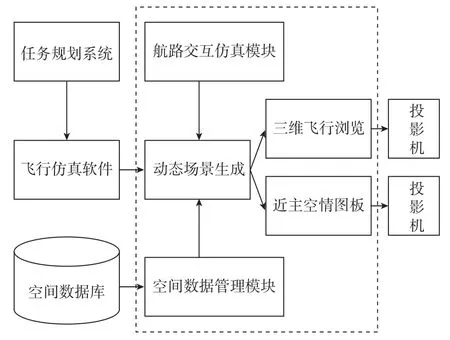
圖6 超低空無人直升機(jī)的飛行可視化系統(tǒng)組成Fig.6 The flight visualization system consisting of lowest-altitude flying
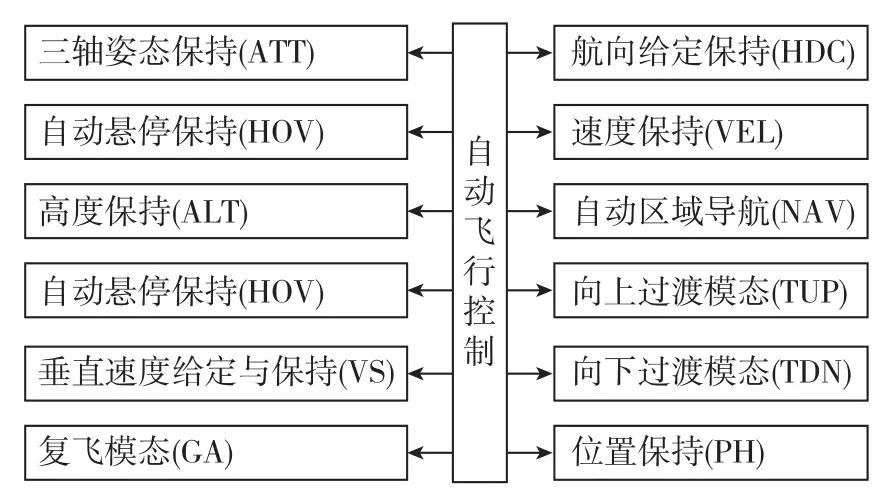
圖7 V750無人直升機(jī)飛行控制系統(tǒng)Fig.7 The flight control system in pilotless helicopter of V750 type
V750無人直升機(jī)采用抗干擾ST-410系列測控通信系統(tǒng),該系統(tǒng)由地面控制站、視距測控?cái)?shù)據(jù)鏈組成。其中,視距測控?cái)?shù)據(jù)鏈包括地面數(shù)據(jù)終端和機(jī)載數(shù)據(jù)終端兩部分。主、備測控通道的頻段分別為L、U/V頻段,可適應(yīng)出口地區(qū)無線電管理規(guī)定。該系統(tǒng)具有對無人機(jī)進(jìn)行任務(wù)規(guī)劃與指揮控制、飛行狀態(tài)和機(jī)載設(shè)備工作狀態(tài)實(shí)施遙控、飛行航跡和遙測參數(shù)進(jìn)行綜合處理顯示和記錄、自動跟蹤定位的能力。該系統(tǒng)還具有多任務(wù)載荷自適應(yīng)接入能力,可以對無人機(jī)載荷數(shù)據(jù)或圖像進(jìn)行實(shí)時(shí)傳輸、處理、顯示、記錄及回放。ST-410系列測控通信系統(tǒng)還包括C頻段、相控陣L頻段(一站多機(jī))、中繼型產(chǎn)品,也可以按用戶需求定制測控通信系統(tǒng)。
V750無人直升機(jī)系統(tǒng)實(shí)現(xiàn)了搭載包括光電吊艙、合成孔徑雷達(dá)(SAR)、三維激光掃描雷達(dá)、數(shù)字航測儀、磁力探測儀、航空Y光譜儀、探照燈和高音喇叭在內(nèi)的多款任務(wù)設(shè)備,已廣泛應(yīng)用于海洋監(jiān)測監(jiān)管、地理信息測繪、邊防巡邏、地礦資源探測、石油管道巡查、電力巡線及線路規(guī)劃、災(zāi)害監(jiān)控與評估、森林防護(hù)、核泄漏監(jiān)測等領(lǐng)域。具體應(yīng)用成果如下:
1)2012年12月,V750無人直升機(jī)系統(tǒng)搭載光電吊艙在萊州灣完成了安全飛行和圖像捕捉、攝錄、回傳、顯示等海上應(yīng)用任務(wù)。
2)2013年2月,V750無人直升機(jī)系統(tǒng)搭載三維激光雷達(dá)在河南信陽圓滿完成超高壓電力巡線飛行。
3)2013年4月,V750-SW型高精度航攝無人直升機(jī)系統(tǒng)通過了國家測繪地理信息局組織的專家評審,實(shí)現(xiàn)了國內(nèi)首例中型無人直升機(jī)1∶500高精度航空攝影作業(yè)。
4)2013年4月,V750無人直升機(jī)系統(tǒng)搭載可見光/紅外光電吊艙、探照燈及高音喇叭在濟(jì)南梨棗峪災(zāi)害現(xiàn)場完成空中監(jiān)控的演練飛行。
5)2013年6月,V750無人直升機(jī)系統(tǒng)搭載磁力探測儀,在萊州灣對海岸進(jìn)行磁力探測。這在國內(nèi)也屬首例。
6)2013年7月,V750無人直升機(jī)系統(tǒng)搭載機(jī)載監(jiān)視與成像雷達(dá),在萊州灣完成海面船舶監(jiān)視,對目標(biāo)快速搜索、定位、跟蹤,實(shí)現(xiàn)大幅寬的高分辨率測繪成像功能。
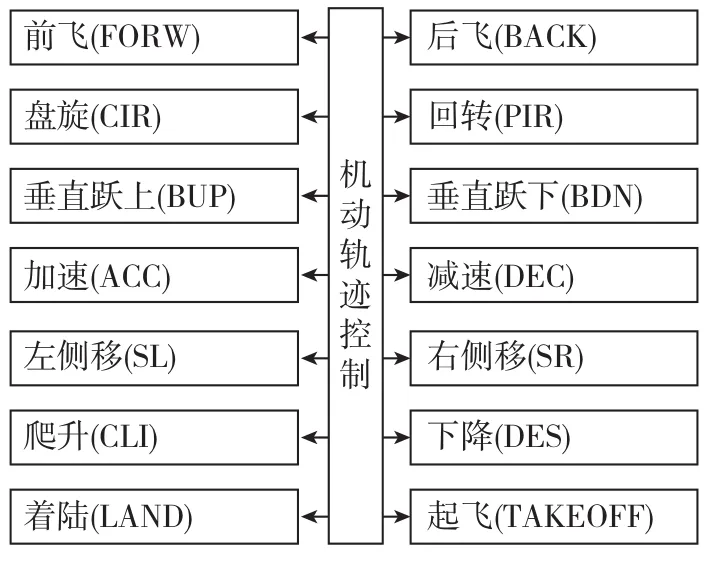
圖8 V750無人直升機(jī)機(jī)動軌跡控制Fig.8 The motorized control trace in pilotless helicopter of V750 type
4 結(jié)論
無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)是根據(jù)無人直升機(jī)數(shù)量、所完成的任務(wù)及任務(wù)載荷的不同,依據(jù)任務(wù)分配、數(shù)據(jù)鏈、戰(zhàn)場電磁、氣象環(huán)境以及戰(zhàn)區(qū)地圖資料、敵方防空系統(tǒng)部署情況等,通過建模及航路規(guī)劃技術(shù)為無人直升機(jī)規(guī)劃出安全系數(shù)最大、作戰(zhàn)效能最高的飛行航線。本文著重闡述了無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)的基本功能,并具體描述了由任務(wù)規(guī)劃站(內(nèi)核)、規(guī)劃算法組件、任務(wù)推演評估子系統(tǒng)以及多個(gè)無直升人機(jī)控制臺組成的任務(wù)規(guī)劃系統(tǒng)結(jié)構(gòu)、技術(shù)方案及實(shí)現(xiàn)方法,且其建模技術(shù)及其優(yōu)化算法在V750無人直升機(jī)中得到應(yīng)用,通過對目標(biāo)進(jìn)行圖像捕捉、快速搜索、定位、跟蹤、攝錄、回傳、顯示、空中監(jiān)控、磁力探測等實(shí)驗(yàn),顯示應(yīng)用效果較好。
[1] 高曉靜,智勇,陳曉峰.無人直升機(jī)任務(wù)規(guī)劃系統(tǒng)體系設(shè)計(jì)[J].計(jì)算機(jī)系統(tǒng)應(yīng)用,2009,22(10):15-18. GAO Xiao-jing,ZHI Yong,CHEN Xiao-feng.Mission planning system architecture design for UAV[J].Computer System Apply,2009,22(10):15-18.
[2] 戴定川,盛懷潔,趙域.無人機(jī)任務(wù)規(guī)劃系統(tǒng)需求分析[J].飛航導(dǎo)彈,2011,15(3):21-24. DAI Ding-chuan,SHENG Huai-jie,ZHAO Yu.The need analysis of UAV mission planning system[J].Flight Aviation Missile,2011,15(3):21-24.
[3] 胡中華,趙敏.無人機(jī)任務(wù)規(guī)劃系統(tǒng)研究及發(fā)展[J].航天電子對抗,2009,25(4):49-54. HU Zhong-hua,ZHAO Min.Research and development of UAV mission planning system[J].Aerospace Electronic Warfare,2009,25(4):49-54.
[4] 宋子善,沈?yàn)槿?無人直升機(jī)綜合飛行控制系統(tǒng)設(shè)計(jì)[J].北京航空航天大學(xué)學(xué)報(bào),1999,25(3):280-283. SONG Zi-shan,SHEN Wei-qun.Design of the control-simulation integration flight control system of remote controlautonomy control type pilotless helicopter[J].Journal of Beijing University of Aeronautics&Astronautics,1999,25(3):280-283.
[5] 魏瑞軒,李學(xué)仁.無人機(jī)系統(tǒng)及作戰(zhàn)使用[M].北京:國防工業(yè)出版社,2009.WEI Rui-xuan,LI Xue-ren.The UAV system and its applicationforbattle[M].Beijing:NationalDefense Industry Press,2009.
[6] 丁明躍,鄭昌文,周成平,等.無人飛行器航跡規(guī)劃[M].北京:電子工業(yè)出版社,2009. DING Ming-yue,ZHENG Chang-wen,ZHOU Cheng-ping,et al.The flight route planning of UAV[M].Beijing:Electronic Industry Press,2009.
[7] 孫濱生.無人機(jī)任務(wù)系統(tǒng)有效載荷技術(shù)現(xiàn)狀與發(fā)展趨勢研究[J].光電與控制,2010,21(12):35-37. SUN Bin-sheng.The research of effective load technology situationanddevelopmenttrendsforUAVmission planning system[J].Photoelectric and Control,2010,21 (12):35-37.
Research and Practice on Mission Planning System of Pilotless Helicopter
CHEN Chang-hao1,CHEN Xue-jiang2,HU Xiao-ping1,ZHENG Li-yan3
(1.College of Mechatronics Engineering and Automation,National University of Defense Technology,Changsha 410073;2.Department of Avionics and Arms Engineering,Army Aviation Institute,Beijing 101123;3.Weifang Tianxiang Aviation Industry Limited Liability Company,Weifang 261000)
It is very important for mission planning system of pilotless helicopter which finishes with extra long distance reconnaissance,monitoring ability and fight.The organization and function module for mission planning system of pilotless helicopter were analysed,the modeling technique and its optimize algonthm were researched,they were tested and verified in pilotless helicopter of V750 type.
manless driving;helicopters;mission planning system;flight control;autonomous control
TN966
A
1674-5558(2016)01-01123
10.3969/j.issn.1674-5558.2016.03.001
2015-05-21
陳昶昊,男,碩士,控制科學(xué)與工程專業(yè),研究方向?yàn)閷?dǎo)航技術(shù)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
