基于雙ARM系統的MIMU航姿測量系統的研究及實現
2016-09-23 03:32:23吉云飛孔令兵
導航與控制 2016年3期
吉云飛,孔令兵,蔣 喆
(北京航天時代光電科技有限公司,北京100094)
基于雙ARM系統的MIMU航姿測量系統的研究及實現
吉云飛,孔令兵,蔣 喆
(北京航天時代光電科技有限公司,北京100094)
針對小型無人機武器平臺對航姿系統小型化、低成本、集成化的設計要求,提出了一種基于雙ARM系統的MIMU航姿測量系統,實現了單板集成所有慣性測量、初始對準、慣性導航、組合導航,以及航姿測量等功能。通過車載導航試驗及飛行試驗考核,該系統可以滿足用戶應用需求。
MIMU;航姿測量系統;組合導航
0 引言
隨著MEMS慣性儀表工程化以及其逐步打破精度瓶頸限制的技術進步,其小型化、低功耗、低成本、抗力學性能好、帶寬高、數字化輸出的應用特點,越來越受到世界各國以及國內各軍兵種的青睞。針對小型無人機等武器平臺對MIMU慣性測量系統日益提高的低成本、小型化、長航時的應用需求,本文提出了一種基于雙ARM系統的MIMU航姿測量系統,其應用特點如圖1所示。當BD導航信息有效時,系統進入MINS/BD/地磁組合導航狀態,實現領航功能;當BD導航信息長時間丟失或無效時,系統進入航姿工作模式,實現無人機作戰平臺的安全返航。通過合理的系統架構及布局設計,實現了單板集成所有慣性測量、初始對準、慣性導航、組合導航,以及航姿測量等功能,并且進行了車載導航試驗及飛行試驗考核,驗證結果表明,該MIMU航姿測量系統具有低成本、小型化(55mm×38.5mm×9mm)、單片集成化的應用特點,相關性能精度可以滿足用戶應用需求。
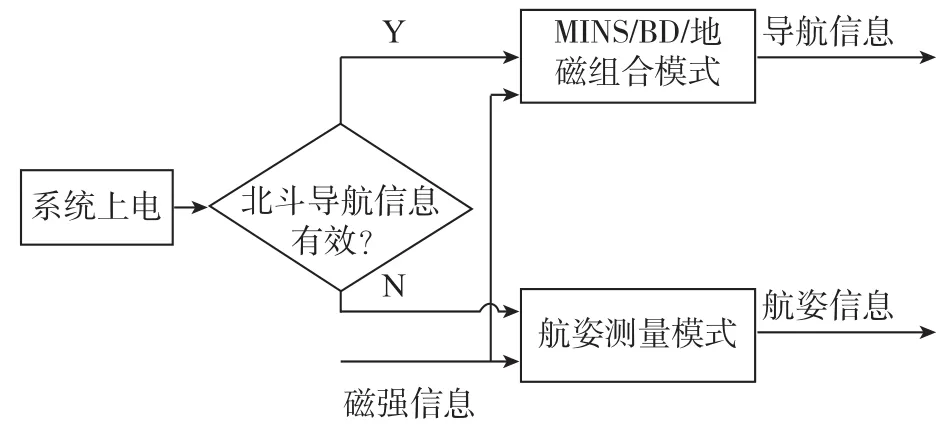
圖1 MIMU航姿測量系統應用流程圖Fig.1 The application flow chrat of the MIMU AHRS
1 系統架構設計
MIMU航姿測量系統架構設計如圖2所示,其慣性測量單元包括三軸正交放置的MEMS陀螺儀以及三軸一體MEMS加速度計,主要用以完成小型無人機等平臺實時角速率及線加速度等慣性參量的測量;微處理器ARM1用于構建數據總線,通過優化SPI總線設計,完成MEMS陀螺和MEMS加速度計數據的實時、高速、同步采集,并將完成誤差補償后的MEMS儀表數據通過高速通信總線傳遞到微處理器ARM2中;微處理器ARM2則通過與微處理器ARM1進行實時通信,完成系統初始對準、慣性導航、組合導航、航姿測量等功能,并最終為飛控系統提供所需要的速度、姿態、位置等信息。圖3所示為 MIMU航姿測量系統照片。
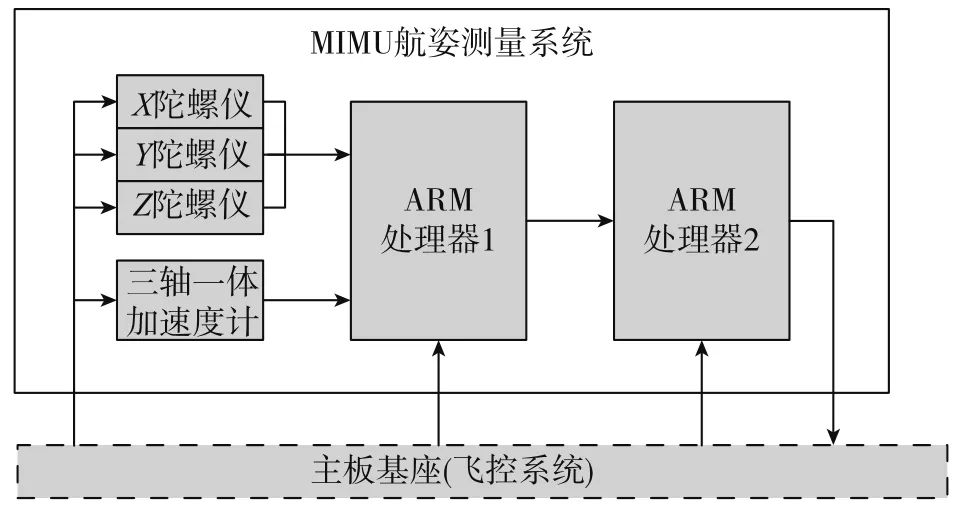
圖2 MIMU航姿測量系統架構設計框圖Fig.2 The design frame of the MIMU AHRS
該系統架構設計的優點在于:實現了慣性儀表測試數據的高速測量以及高速通信,避免了慣性測量同步誤差;通過合理數據總線設計,以及器件選型、布局,在高性能實現既定功能的基礎之上,實現了MIMU航姿測量系統小型化、單板集成化設計;實現了系統系列化設計,通過合理設計系統總線電路,實現了三款不同類型MEMS加速度計儀表的互換性設計,便于系統成本控制;便于系統批量生產,目前組合系統算法已固化至微處理器ARM2中,生產過程中不需要對ARM2進行任何操作,生產過程中需要進行的MEMS儀表參數標定及補償過程均在ARM1中完成,提高了產品研制過程中的工藝性、可靠性和安全性。
圖3 MIMU航姿測量系統照片Fig.3 The photo of the MIMU AHRS
2 MIMU/BD/地磁組合導航算法優化設計技術
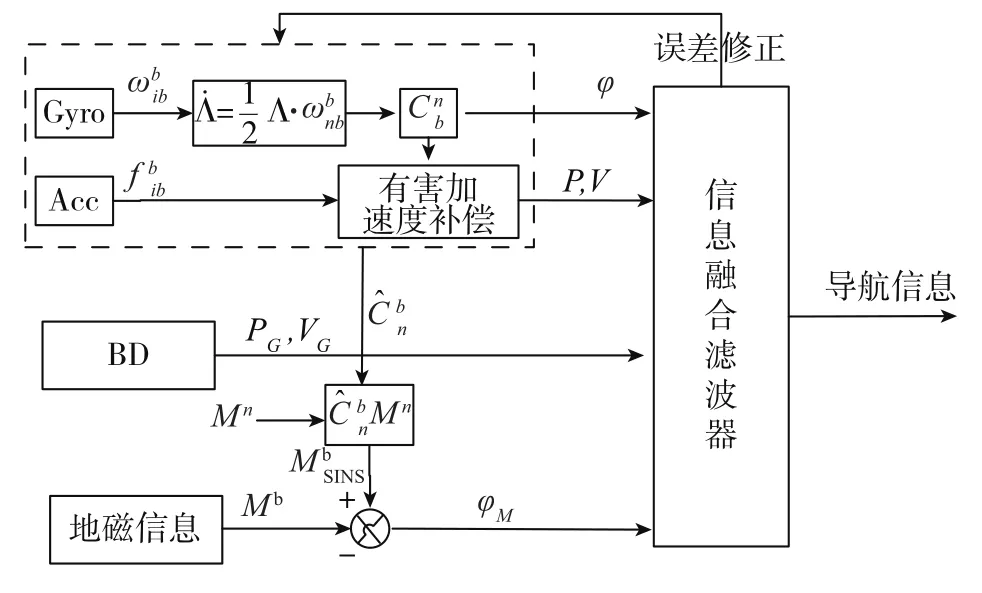
圖4 MIMU/BD/地磁組合導航算法原理框圖Fig.4 The principle frame of the MIMU/BD/geomagnetic integrated navigation arithmetic
MIMU/BD/地磁組合導航算法原理框圖如圖4所示,信息融合濾波器原理圖[1]如圖5所示,項目研制過程中采用離散Kalman濾波算法作為系統多信息融合濾波器。Kalman濾波器是一種線性最小方差估計,由于其算法遞推、便于計算機執行的特點,因此被廣泛應用于各類工程實際當中。但是,也正是如此,Kalman濾波算法的效果受到系統噪聲統計模型及計算機處理能力的限制,處理不當,甚至會引起濾波器發散。
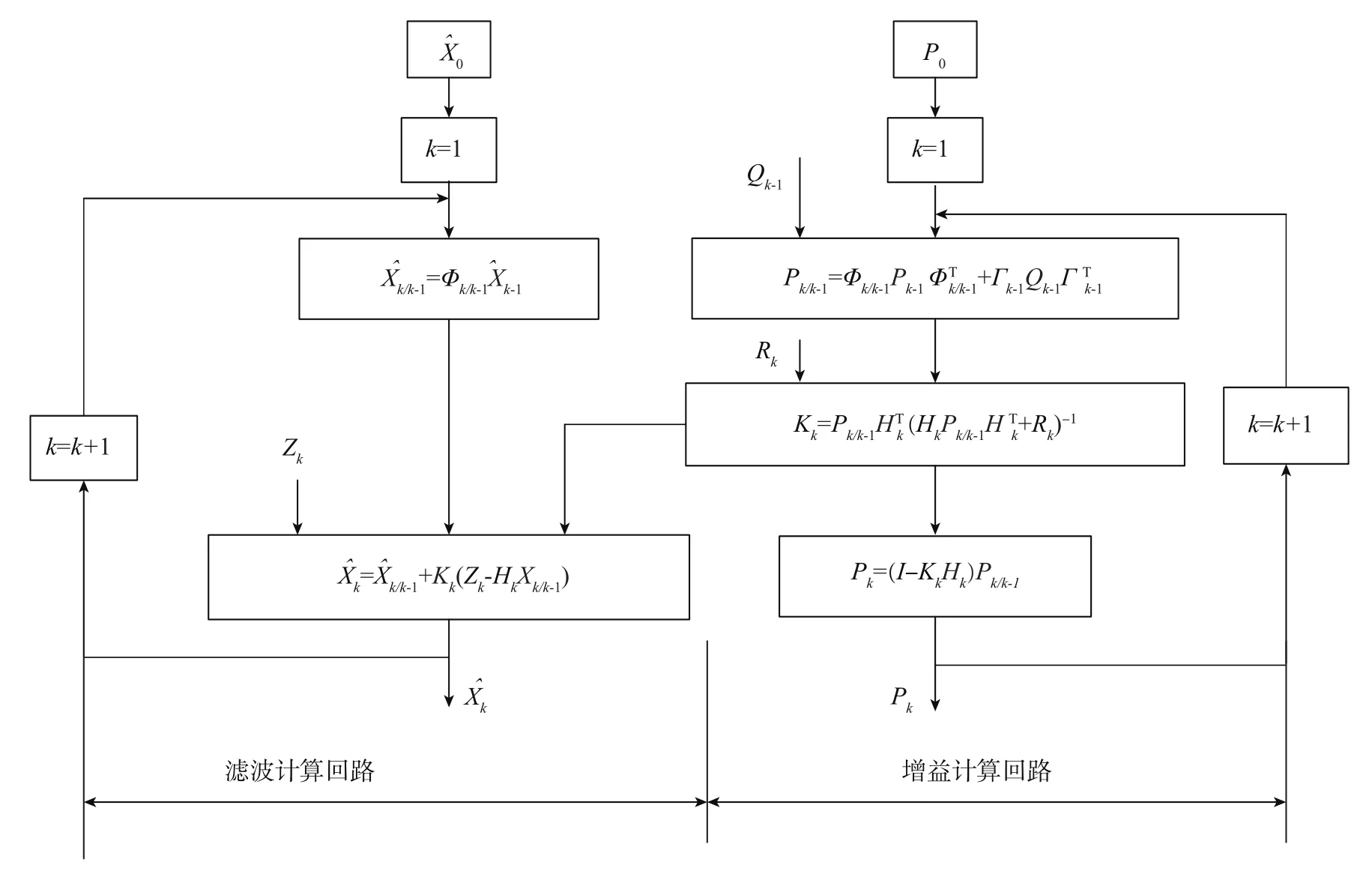
圖5 信息融合濾波器原理圖Fig.5 The principle frame of the information fusion filter
2.1基于MIMU航姿測量系統的kalman濾波器優化設計算法
如何有效解決ARM微處理器計算能力對系統濾波精度的限制,避免MEMS儀表較大的系統噪聲造成濾波器的不穩定甚至發散,是項目研制過程中需要解決的第一個問題。
通過對Kalman濾波算法對微處理器計算能力的要求進行分析,其主要的運算量在于濾波器的時間更新過程中的離散化過程。并且,由于MEMS陀螺儀儀表噪聲(100(°)/h,1s平滑)較大,因此,傳統Kalman濾波離散化處理過程中易于受到系統噪聲的污染,影響系統姿態估計的穩定性。
傳統的Kalman濾波中對狀態轉移矩陣的離散化處理是將其進行泰勒展開[1],如式(1)所示,濾波過程中需要對所有導航周期內的姿態轉換矩陣進行離散化處理,并且往往不知道系統量測信息何時到來,因此對處理器計算載荷增加的同時,其短期濾波效果往往不夠好,高動態下甚至會造成系統的發散,需要增加限定記憶或衰減記憶等技術處理手段,不適合低成本MEMS慣性測量系統的應用。

式中,Tn為導航更新周期。
結合MIMU航姿測量系統較大的系統噪聲特點,項目研制過程中對系統Kalman濾波離散化過程進行了優化處理,首先對系統噪聲進行平滑濾波處理,并且在離散化前端增加狀態轉移矩陣累積濾波處理過程,避免系統噪聲誤差隨時間更新過程進入Kalman濾波器,隨后在濾波周期內對系統進行離散化操作。其離散化優化算法如式(2)所示。
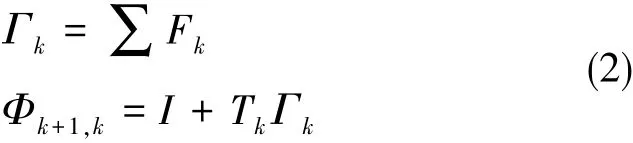
式中,Tk為Kalman濾波周期。
本優化算法避免了MEMS儀表較高的系統測量噪聲對Kalman濾波器穩定性的影響,可以有效降低ARM微處理器的運算量,仿真表明,本算法還可以有效提高MIMU航姿測量系統機載環境下的動態穩定性,并且不損失 Kalman濾波估計精度。
2.2航向阻尼技術研究
對于MINS/BD組合導航系統而言,衛星導航系統可以有效抑制速度及水平姿態角誤差的發散,但是對于航向角誤差發散的抑制作用是很有限的,因此需要采用磁羅盤進行航向角誤差的阻尼,其阻尼效果直接關系到系統組合導航濾波過程中的穩定性。當系統無磁場干擾時,對于兩軸磁傳感器(X,Y),當其在水平面旋轉時,理想的輸出(Xh-Yh)應為一圓心位于原點的正圓。而干擾磁場存在時,其由硬鐵磁場與軟鐵磁場兩部分組成。硬鐵磁場由磁羅盤平臺(可認為是載體)上的永久性磁鐵和被磁化的鋼鐵物質組成,其特點是當載體位于某一固定位置時,其強度為一定值,不隨航向的變化而變化,在輸出數據(Xh-Yh)中表現為固定偏移量。軟鐵磁場可認為由地球磁場與磁羅盤周圍的磁化物質相互作用而產生。與硬鐵磁場不同的是,軟鐵磁場強度的大小與方向與磁羅盤的方位有關[2]。另外,其還受到安裝誤差的影響,因此必須對系統羅差進行校正。依據Poisson給出的羅差數學模型[3],可描述為式(3)~式(5)。
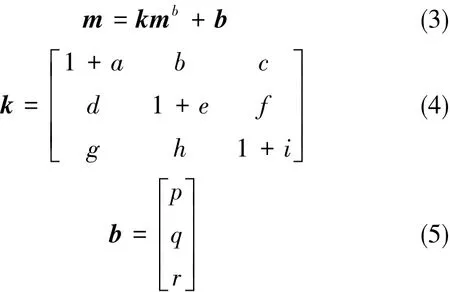
式中,mb為地磁場在載體坐標系下的投影,m為磁羅盤輸出,k為軟磁材料引起的羅差,b為硬磁材料引起的誤差。
當系統工作環境穩定時,上述羅差系數a、b、c、d、e、f、g、h、i、p、q、r可以通過十二位置試驗進行最小二乘擬合得到,從而完成飛行試驗前的羅差系數標定。
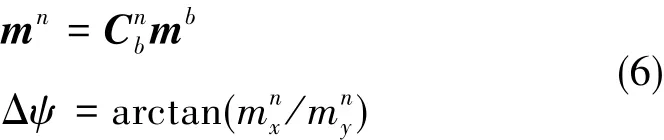
載體飛行過程中,其電氣設備或外界磁場變化等均會引起地磁扭曲現象的存在,會影響系統航向及姿態的濾波效果,目前的方案是首先將系統磁羅盤輸出轉化到導航坐標系下,從而使濾波器選取的地磁參考方向與測得的地磁矢量方向一致,可以極大地校正地磁磁場扭曲造成的誤差[4],其校正優化方法如式(6)所示。
3 基于梯度下降法的航姿算法研究
針對航姿測量系統中MEMS器件精度低、易發散的問題,本項目采用一種基于梯度下降[4]的姿態融合算法將陀螺儀、加速度計和地磁信息進行融合,對四元數更新方程進行補償,以提高無衛星導航信息時系統的測量精度。
3.1姿態解算的四元數法
四元數法是一種間接處理姿態解算的方法,四元數與方向余弦陣的關系可確定為:
用tij表示的元素(i=1,2,3;j=1,2,3),即可得到3個姿態角:
其中,陀螺儀測得機體坐標系下x、y、z軸的角速度。設T為采樣周期,則可對四元數進行更新。

3.2基于梯度下降的姿態融合算法
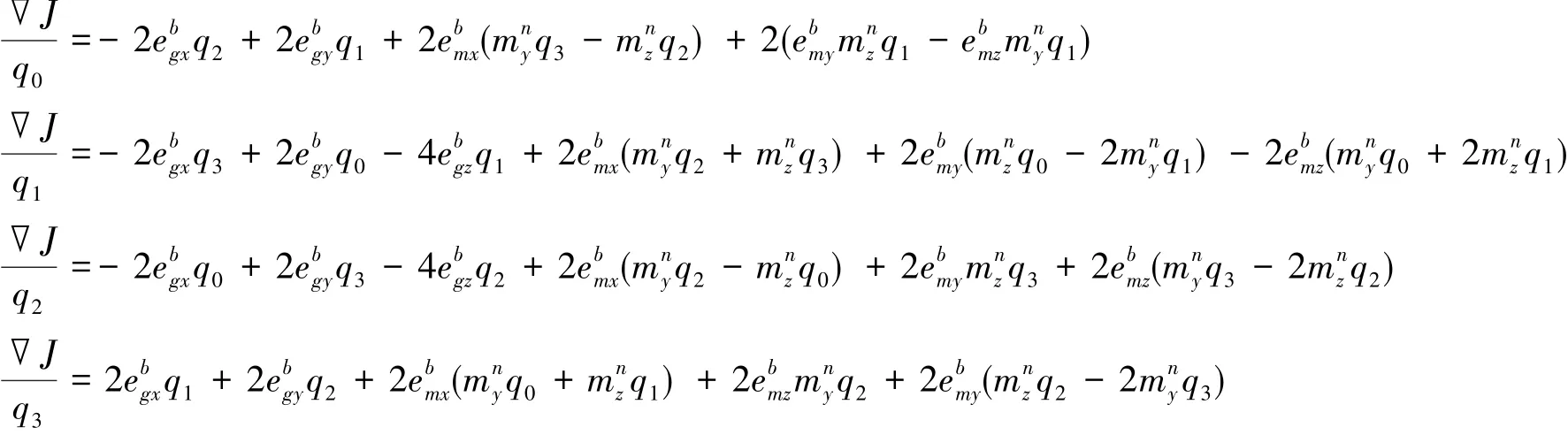
由于陀螺儀有累積誤差,因此,可把加速度計和磁強信息作為一個參考基準,在每次四元數更新時對其進行補償,從而實現這3種傳感器的數據融合,提高系統的測量精度和動態性能。
為簡化計算,將重力矢量gn=[00-1]T轉換到機體坐標系中,利用四元數可得到加速度計的輸出估計值:

式中,η是步長,其大小的選擇會直接影響到系統的動態特性和四元數收斂的快慢,在本項目,此值確定為0.026。
4 飛行試驗驗證
4.1車載導航試驗驗證
車載導航試驗過程中,選取MTI系統作為參考基準,分別對組合導航模式和航姿模式下的MIMU航姿測量系統測量精度進行驗證,其航姿輸出如圖6、圖7所示,車載導航試驗全過程航姿測量精度如表1所示,滿足系統應用要求。
4.2飛行試驗驗證
為充分驗證系統飛行試驗過程中的位置及姿態測量精度,對系統與某試驗場進行了飛行試驗考核,并依據遙測數據進行了對比分析,如圖8~圖11所示,飛行試驗過程中,無人機飛行平穩,功能正常,飛行試驗成功,滿足系統應用要求。
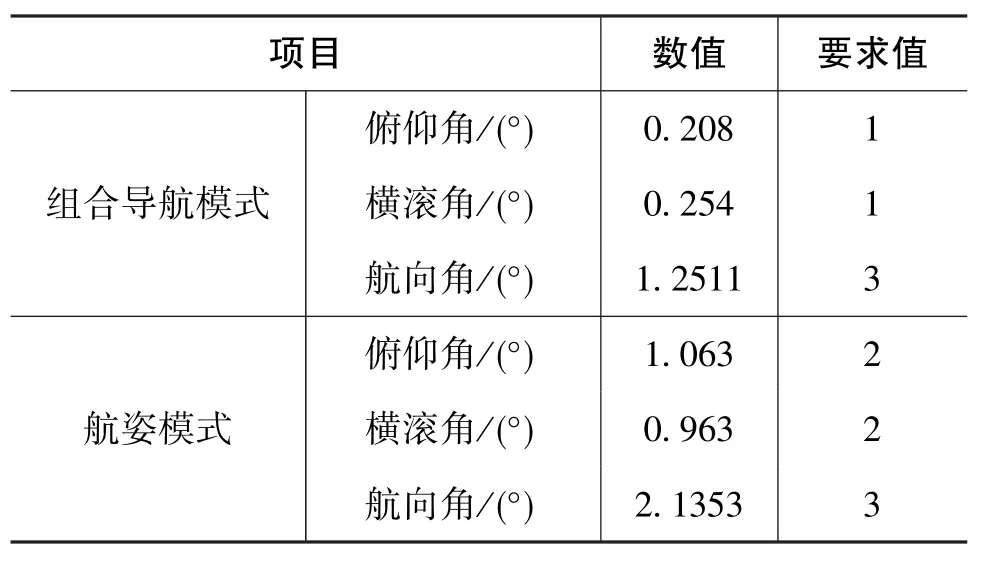
表1 車載導航試驗全過程系統航姿測量精度Table 1 The attitude and head measurement precision when it in the car
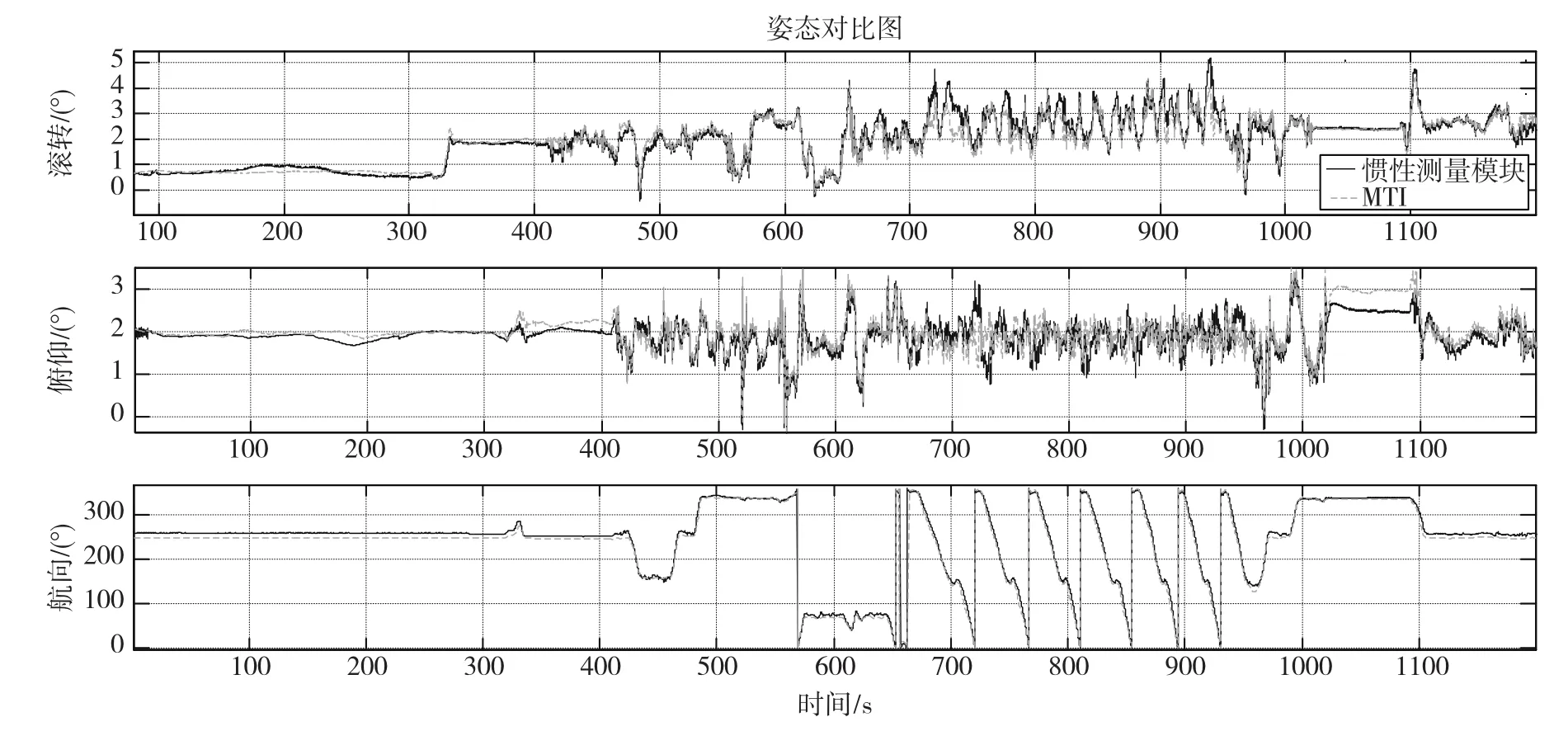
圖6 組合導航模式下的航姿輸出Fig.6 The output of attitude and head when it worked on the integrated navigation mode
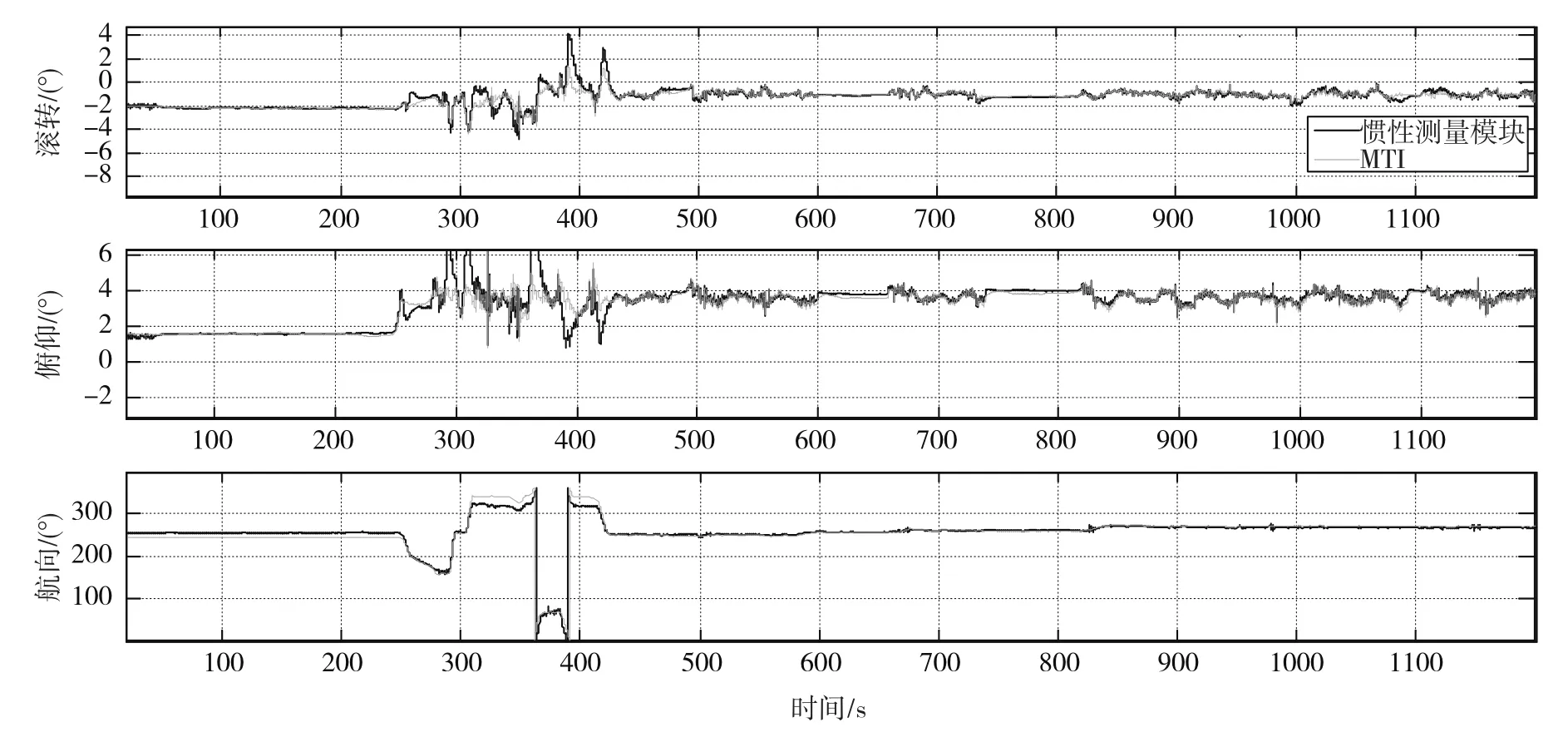
圖7 航姿模式下的航姿輸出Fig.7 The output of attitude and head when it worked on the AHRS mode
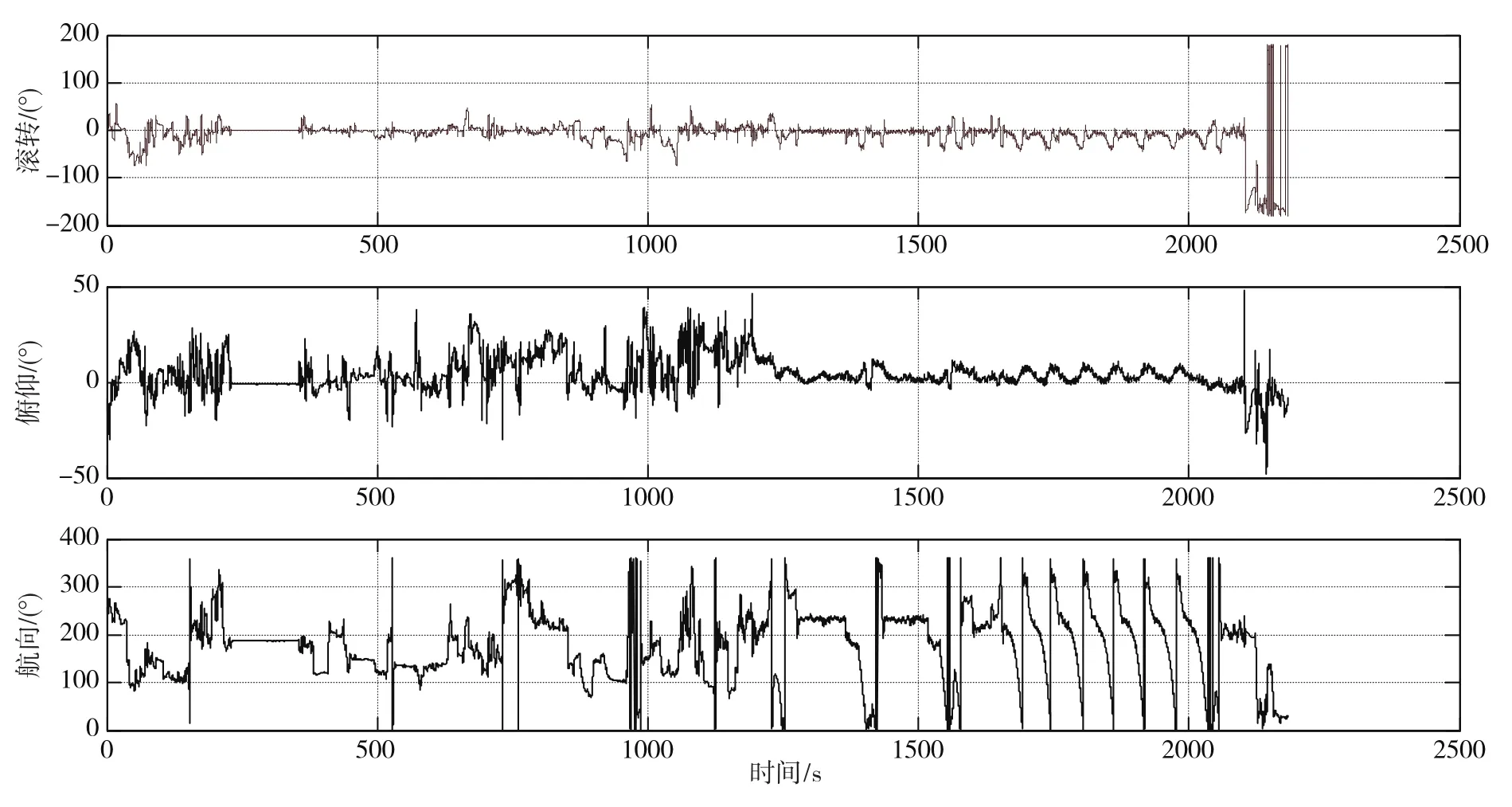
圖8 飛行試驗中的姿態輸出Fig.8 The output of attitude and head in flight

圖9 飛行試驗中的北向速度與北斗對比Fig.9 The north velocity in flight contrast with BD
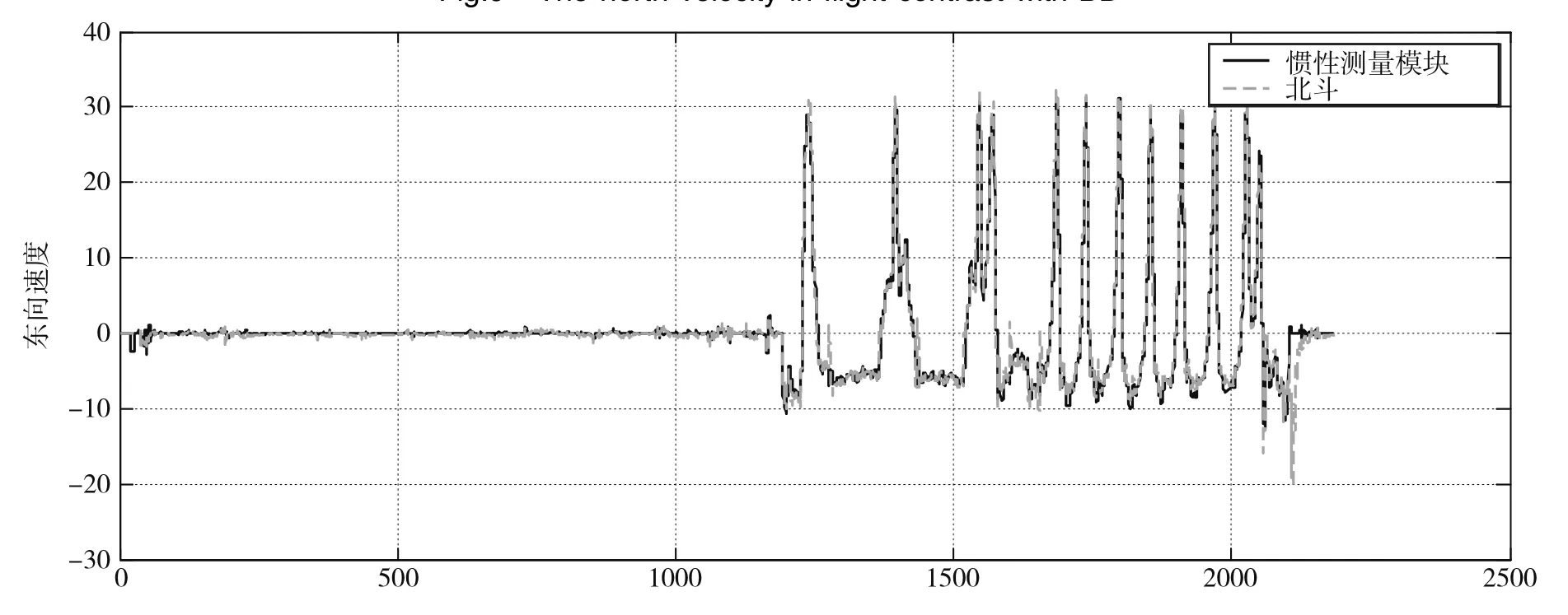
圖10 飛行試驗中的東向速度與北斗對比Fig.10 The east velocity in flight contrast with BD
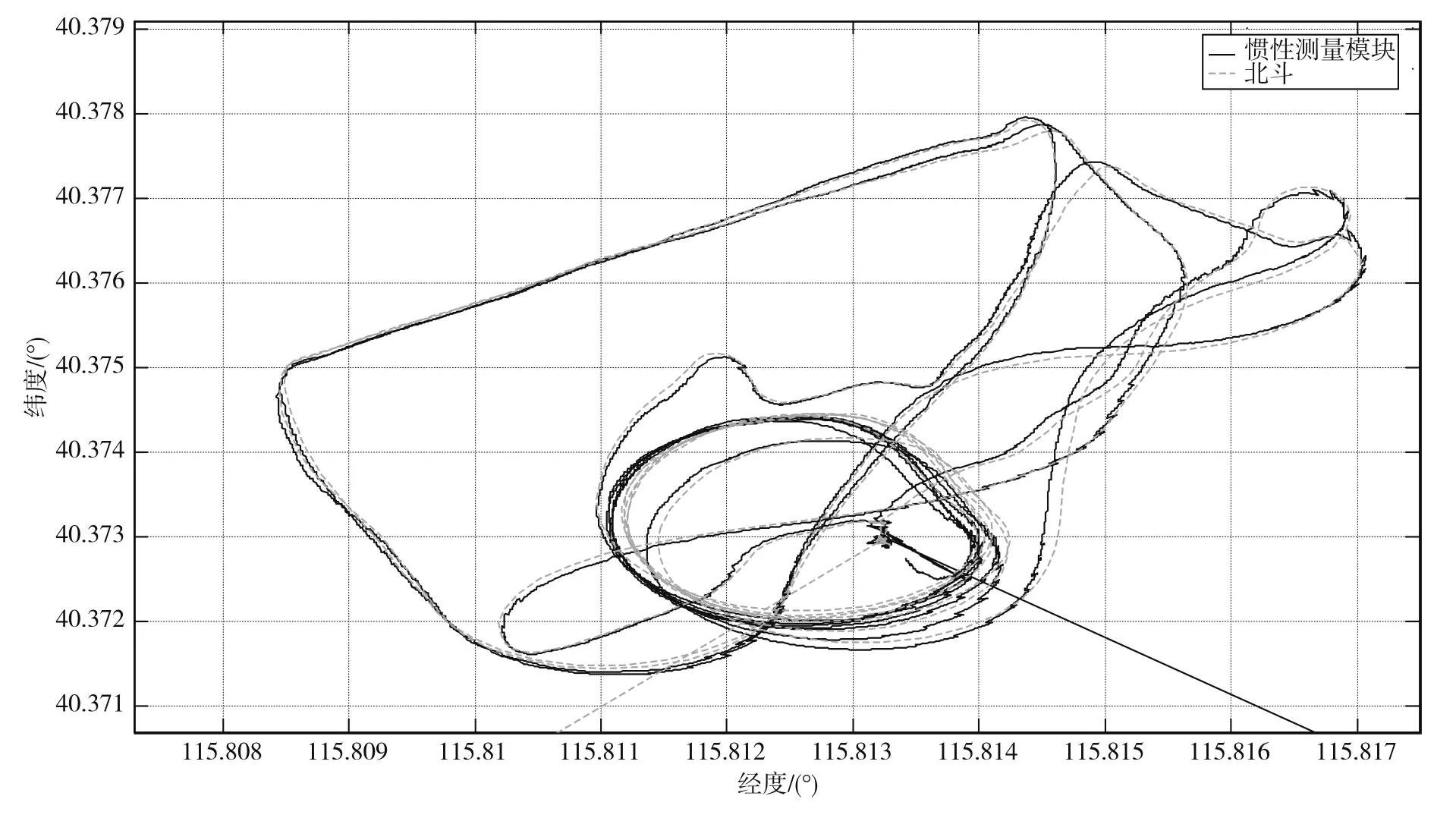
圖11 飛行試驗中的MIMU航姿系統航跡與北斗航跡對比Fig.11 The flight path of the MIMU AHRS in flight contrast with the track of BD
5 結論
本文采用基于雙ARM系統的MIMU航姿系統的架構設計,實現了單板集成組合導航及航姿系統所有功能,并且進行了車載導航試驗驗證及飛行試驗考核,驗證結果表明,該系統可以滿足用戶應用需求。
[1] 秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,2012. QINYong-yuan, ZHANGHong-yue, WANGShuhua.Kalman filter and integrated navigation principle[M]. Xi'an:Northwest Industrial University Press,2012.
[2] 楊新勇,黃圣國.磁羅盤的羅差分析與驗證[J].電子科技大學學報,2004,33(5):547-548. YANG Xin-yong,HUANG Sheng-guo.Magnetic deviation analysis and verification for magnetic compass[J].Journal of UEST of China,2004,33(5):547-548.
[3] 郭鵬飛,華春紅,任章,等.基于遞推最小二乘的航姿系統羅差校正[J].中國慣性技術學報,2008,16(1):28-31. GUOPeng-fei,HUAChun-hong,RENZhang,et al.Magnetic deviation compensation using recursive least square for AHRS[J].Journal of Chinese Inertial Technology,2008,16(1):28-31.
[4] Madgwick S O H.An efficient orientation filter for inertial and inertial/magnetic sensor arrays[J].Report x-io and U-niversity of Bristol(UK),April 30,2010.
[5] 朱文杰,王廣龍,高鳳岐,等.基于MIMU和磁強計的在線實時定姿方法[J].傳感技術學報,2013,26(4):537-539. ZHU Wen-jie,WANG Guang-long,Gao Feng-qi,et al.On-line real-time attitude determination method using MIMU and magnetometer[J].Chinese Journal of Sensors and Actuators,2013,26(4):537-539.
[6] 姚遠,李中健,雷志榮,等.基于ARM的微型航姿參考系統設計與實現[J].電子設計工程,2014,9(18):91-92. YAO Yuan,LI Zhong-jian,LEI Zhi-rong,et al.Design and implementation of attitude and heading reference system based on ARM[J].Electronic Design Engineering,2014,9(18):91-92.
Research and Realization of MIMU AHRS Based on Double ARM System
JI Yun-fei,KONG Ling-bing,JIANG Zhe
(Beijing Aerospace Times Optical-electronic Technology Co.,Ltd,Beijing 100094)
According to the miniaturization,low cost,integration design requirements of AHRS used in the small unmanned aerial vehicle,this paper puts forward a kind of MIMU AHRS based on the double ARM system,realized the integration of all inertial measurement,initial alignment,inertial navigation,integrated navigation,attitude and head measurement,and other functions on single board.Through the assessment of the vehicle navigation test and flight test,it indicated that the system can meet the needs of the user application.
MIMU;attitude and heading reference system(AHRS);integrated navigation
U666.1
A
1674-5558(2016)01-01107
10.3969/j.issn.1674-5558.2016.03.004
2015-04-17
吉云飛,男,博士,工程師,研究方向為捷聯慣性導航系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
