基于載體姿態測量的微伺服吊艙
2016-09-23 03:32:27丁祝順蔣鴻翔
導航與控制 2016年3期
關鍵詞:測量
宋 夏,丁祝順,丁 偉,蔣鴻翔,張 巍
(北京航天控制儀器研究所,北京100039)
基于載體姿態測量的微伺服吊艙
宋 夏,丁祝順,丁 偉,蔣鴻翔,張 巍
(北京航天控制儀器研究所,北京100039)
針對微小型無人機光電吊艙對光軸穩定與目標跟蹤的需求,研究了一種基于載體姿態測量的光學平臺穩定技術。該技術利用吊艙基座上的速率陀螺測量機體三軸姿態運動,通過控制光學平臺的俯仰和偏航兩通道伺服系統實現對光軸的慣性空間穩定。該系統使用步進電機來當執行機構,根據步進電機的特性,可以推導得到控制量與轉速的關系,由此省去了在一般捷聯穩定技術中的微分測速環節,得出了一種新的基于前饋控制的不變性原理。設計了解耦指令分配算法,將一個兩軸耦合系統,轉換為兩個獨立的單軸系統。在單軸控制中,分別設計了比例控制及比例積分控制算法實現對光軸的穩定控制和跟蹤。最后通過在 Matlab/Simulink環境下的仿真,以及實際的搖擺臺試驗,證明了基于載體姿態測量的穩定技術能夠實現微小型無人機光電吊艙的光軸穩定。
光軸穩定;步進電機;基于姿態測量的穩定技術
0 引言
相比于大型無人機,微小型無人機在飛行中更容易受到風的影響而造成姿態大幅變化,從而造成光電吊艙的光學載荷視軸不穩定,影響光學載荷的清晰成像。為了克服這些影響,必須通過陀螺穩定平臺將光學載荷的視軸與載體的運動和振動相隔離,保持視軸的穩定。考慮到由于微小型無人機光電吊艙的體積非常有限,精度較高的陀螺無法放入載荷艙與光學載荷固連,因此可采用基于姿態測量的穩定控制,將陀螺與吊艙基座固連,通過解算實現視軸穩定。本系統的執行機構采用了步進電機驅動方式,通過記錄步進電機的轉動步數來記錄框架角位置,并可以直接得到輸入控制量與輸出轉速間的關系,與一般的捷聯穩定方案相比,省去了微分測速環節,采用直接的前饋方式來實現視軸的穩定。
1 平臺結構及坐標系定義
兩軸平臺伺服系統如圖1所示[3],由內到外依次為:載荷組件(可見光相機),俯仰框架,方位框架。陀螺安裝在基座上,兩個框架軸兩端分別安裝電機。
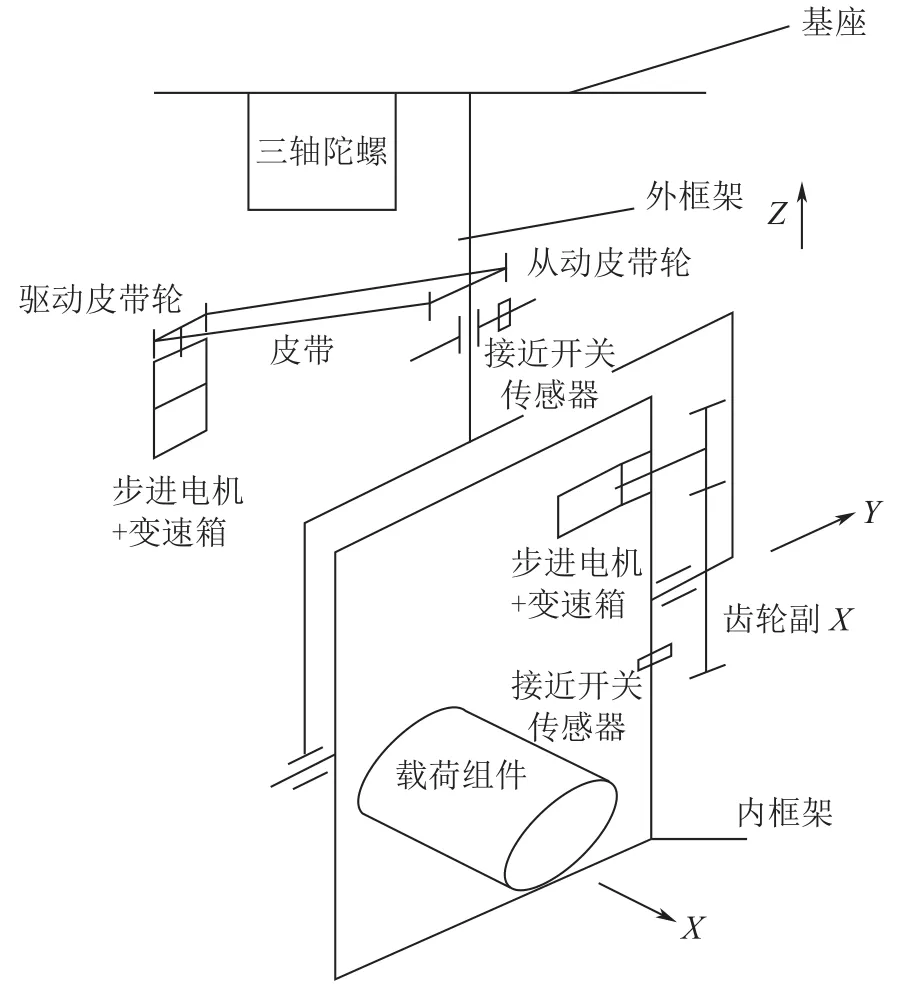
圖1 兩軸穩定平臺結構Fig.1 The structure of two-axis platform
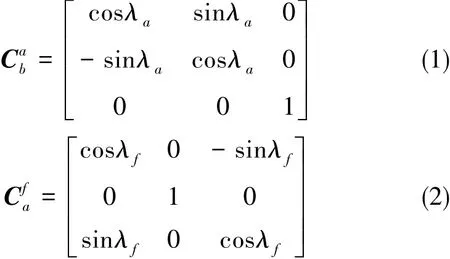
慣性平臺各個坐標系的關系如圖2所示。其中,O-XbYbZb為機體坐標系;O-XaYaZa為方位框坐標系,其為機體坐標系繞Zb軸旋轉λa角度后得到;O-XfYfZf為俯仰框坐標系,其為方位框坐標系繞Ya軸旋轉λf角度后得到,攝像機安裝在俯仰框架上,光軸與Xf平行。為機體坐標系到方位坐標系的旋轉變換,為方位坐標系到俯仰坐標系的旋轉變換[1]。
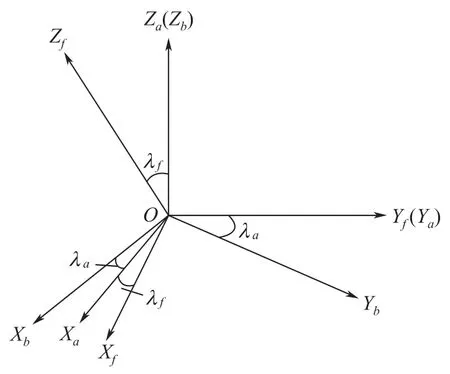
圖2 坐標系定義Fig.2 The definition of coordinate system
2 基于姿態測量光電穩定平臺運動學建模
根據兩軸雙框架基于姿態測量光電穩定平臺的結構形式與復合軸系系統的運動原理,俯仰框的運動是俯仰框自身轉動和偏航框耦合運動的合成,偏航框的運動是偏航框自身轉動和機體運動共同引起的。因此,基于姿態測量光電穩定平臺視軸的運動是由機體、偏航框和俯仰框的運動合成得到的,其運動學方程需通過各軸系坐標系之間的旋轉變換進行分析。
根據框架結構和復合運動原理,內框的運動由內框自身運動與外框耦合運動合成,外框運動由外框自身運動和機體運動合成,光軸的運動由內框、外框及機體運動所合成。
令基座在慣性坐標系中的三軸角速度為:ωb(t)=[ωbxωbyωbz]T,外框三軸角速度為:ωa(t)= [ωaxωayωaz]T,內框三軸角速度為:ωf(t)= [ωfxωfyωfz]T。
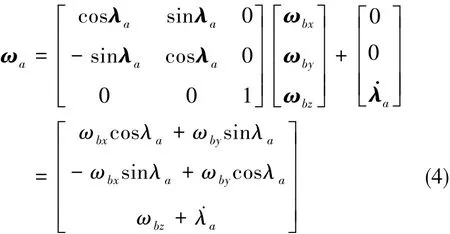
方位坐標系相對于慣性坐標系的角速度矢量為:

將式(1)帶入式(4),則方位框角速度分量為:
同理,ωa(t)將通過Oyf軸的幾何約束和摩擦約束耦合到俯仰框坐標系中,令此耦合速度矢量為:


則俯仰框坐標系相對于方位框坐標系的角速度矢量為:

將式(2)、式(4)帶入式(7)得俯仰框角速度分量為:

光電穩定平臺的主要任務是隔離基座擾動,保證光軸在慣性空間中的穩定,根據運動學分析可以得到光軸穩定方程,即:

根據式(9)可以分別得到方位與俯仰軸的輸入控制量,即 ˙λa與 ˙λf的表達式。
3 光學平臺穩定控制
3.1速率環穩定
兩軸微吊艙單軸基于姿態測量穩定原理概括如下(以俯仰軸為例):假設機體在慣性空間中具有角運動,由于摩擦力矩、質量偏心等干擾因素的影響,引起框架(吊艙)在慣性空間的角運動。與利用陀螺直接測量框架的慣性空間角速率不同,基于姿態測量方式是利用機體上陀螺測得機體三軸姿態變化,伺服系統通過將三軸姿態變化解算為兩框架上的控制信號,得到的值作為速率穩定控制路的輸入量,由速率穩定控制環節計算得到電機控制量,驅動電機和框架運動,從而抵消機體運動帶來的視軸晃動。控制框圖如圖3所示。

圖3 控制原理框圖Fig.3 The frame of control
在圖3中,ωcmd為跟蹤指令,ωp為平臺慣性空間角速度,ωB為機體姿態擾動角速度,ωf為角速度反饋信息,G1(s)為陀螺傳遞函數,G2(s)為解算環節傳遞函數,Gn(s)為速率控制器,Kn為框架運動學傳遞函數,Km為步進電機傳遞函數。
由圖3可以得到ωp的表達式為:

為了便于分析基座的耦合作用,令式(10)中的跟蹤指令ωcmd=0,由式(10)得到基座擾動輸入ωB單獨作用下的平臺輸出角速度為:

在式(11)中,ω′p是只有基座擾動ωB作用下平臺的角速度,要消除基座運動對視軸指向的耦合作用(即ω′p=0),代入式(12)中,得出理想情況下基于姿態測量穩定完全解耦的條件,也即系統對基座擾動的完全不變性原理為:

由式(12)可知,在基于姿態測量穩定中,基座擾動是影響姿態測量穩定的主要因素。
若要保證視軸的穩定,則需要Gn(s)KmKnG2G1=1。其中,G1(s)=1000,Km=0.005,角度為0°時,解算系數G2=1,由于本系統使用的是步進電機。因此,速率控制器發出控制指令時,電機每接收到1個脈沖信號,就相應轉動一步,框架也隨其一同轉動特定角度,這里框架模型可以近似為Kn=1,將以上數據帶入式(12)可得Gn(s)=0.2。
文獻[11]介紹了一般的捷聯穩定方案,其控制原理如圖4所示。
其推導出基座擾動輸入ωB單獨作用下平臺的角速度為:

圖4 一般的捷聯穩定方案控制原理Fig.4 Control principle of usual strapdown stabilization technique

在式(13)中,ω′p是只有基座擾動ωB作用下平臺的角速度,要消除基座運動對視軸指向的耦合作用(即使ω′p=0),代入式(13),得出理想情況下一般的捷聯穩定完全解耦的條件,即系統對基座擾動的完全不變性原理為:

可以看出,在本系統中,由于空間結構十分有限,設計中沒有加入角位置或角速度傳感器,而是使用步進電機經過計算其轉動的步數來測量角度,并根據步進電機的特性推導得到框架的角速度,因此得到的完全不變性原理與文獻中有所不同。
3.2位置環穩定
微小型吊艙位置環控制框圖如圖5所示,其中跟蹤控制器Gp(s)采用PI控制。

圖5 位置環控制框圖Fig.5 The control frame of position loop
當系統輸入為單位階躍響應時,系統的輸出如圖6所示。
從圖6中可以看出,對于PI控制而言,系統超調量為18%,上升時間為0.171s,系統輸出響應速度較快,具有良好的動態和穩態性能。
當目標以幅值為1°,頻率為1Hz的正弦信號運動時,系統輸入及輸出曲線如圖7所示。
由圖7可以看到,當目標以幅值為1°,頻率為1Hz的正弦信號運動時,輸出曲線能夠實現有效跟蹤,僅僅在相位上有一些滯后。

圖6 系統階躍信號輸出Fig.6 System output of step response
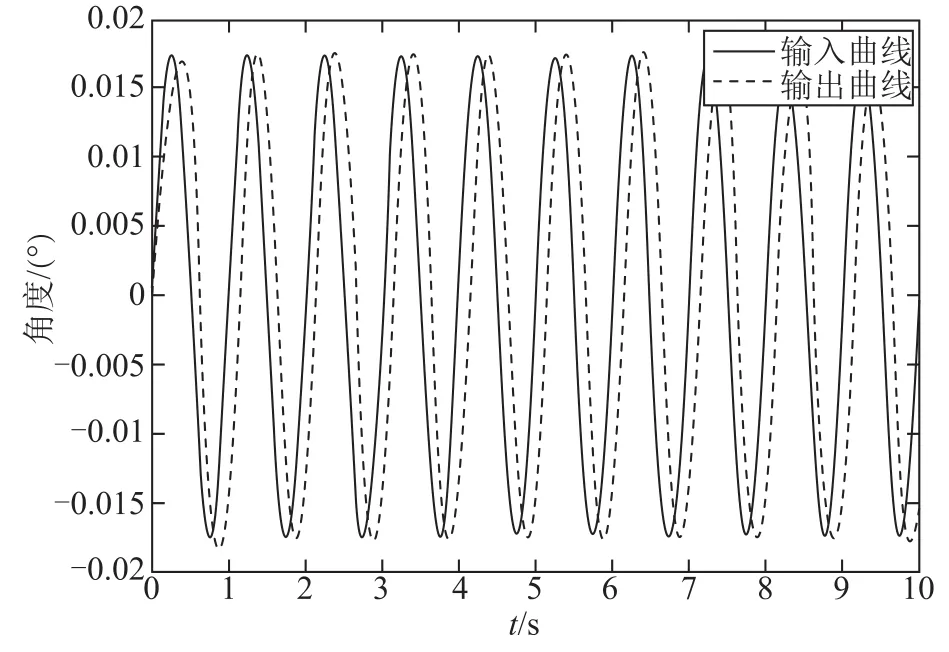
圖7 系統輸入輸出曲線Fig.7 System input and output
4 實驗分析
選用某臺基于姿態測量穩定的微小型吊艙,將它固定在兩軸搖擺臺上,使視軸跟蹤某一目標,讓搖擺臺分別按1°/1Hz、3°/0.4Hz、5°/0.2Hz擺動,所測得的跟蹤精度如表1所示,圖8和圖9是輸入為1°/1Hz時方位軸與俯仰軸跟蹤誤差。
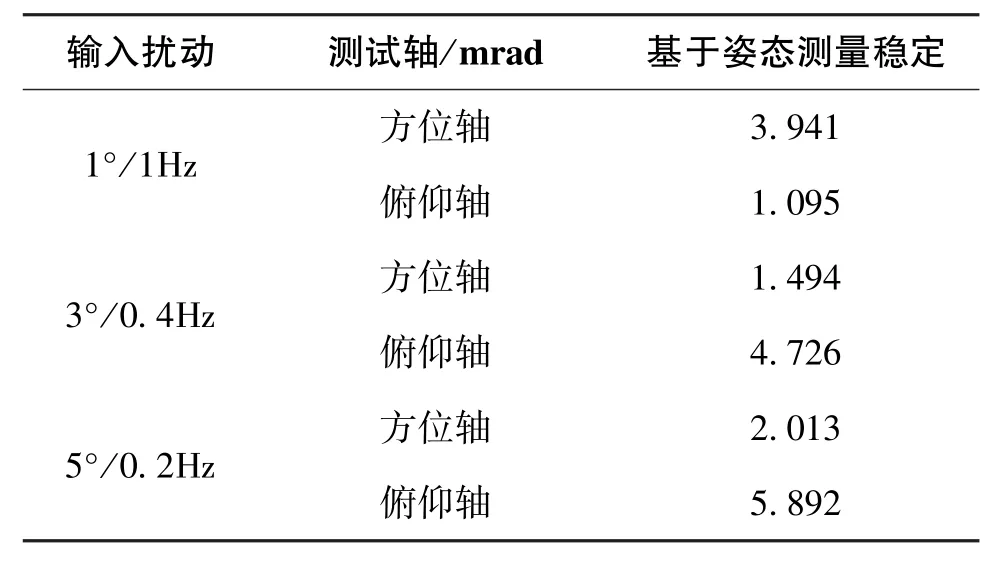
表1 不同擾動下所測得的系統跟蹤精度Table 1 System tracking accuracy in different distribution
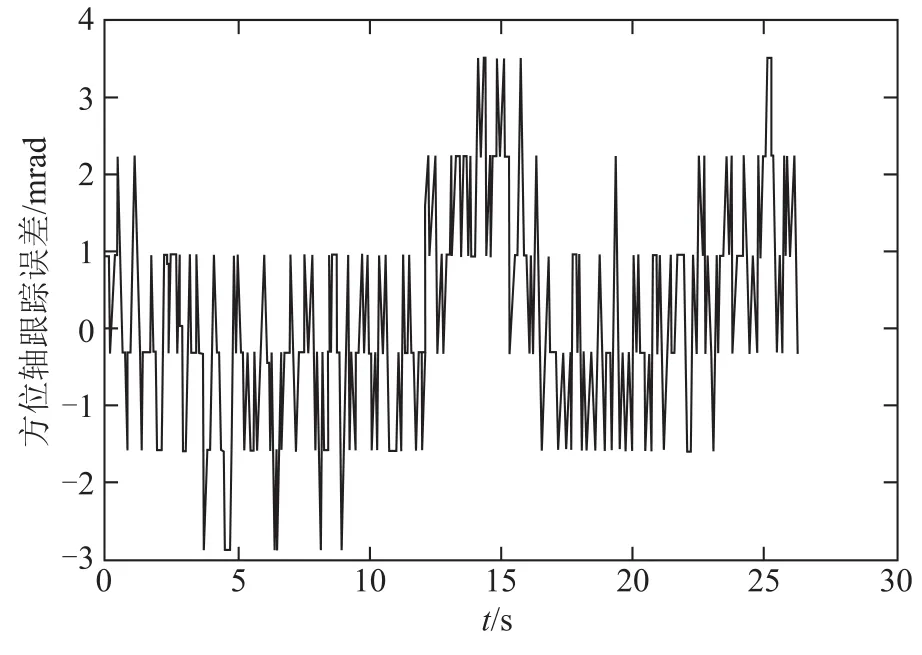
圖8 方位軸跟蹤響應曲線Fig.8 The tracking output of azimuth axis
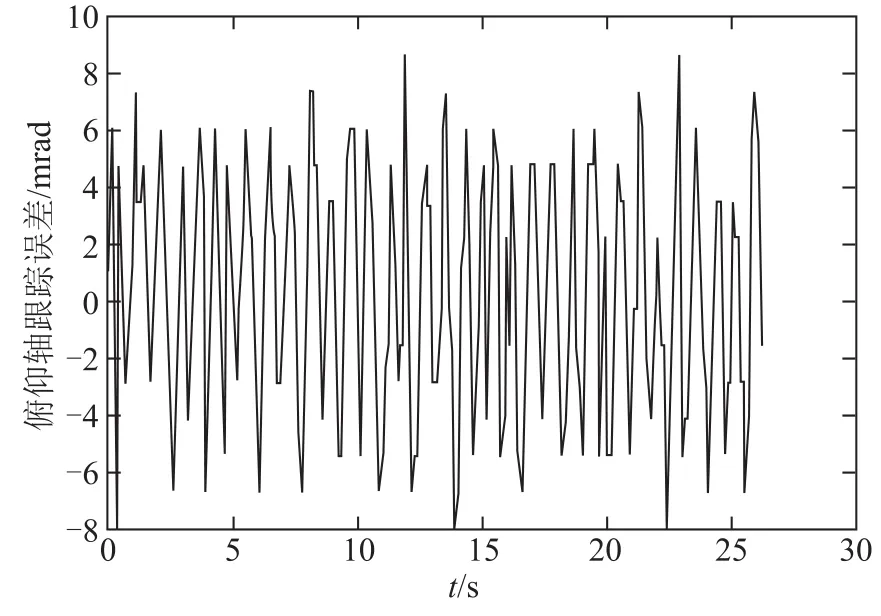
圖9 俯仰軸跟蹤響應曲線Fig.9 The tracking output of pitch axis
5 結論
本文對基于姿態測量穩定技術在兩軸微小型吊艙中的應用進行了詳細的研究,制定出了基于姿態測量式光電穩定平臺伺服控制方案,針對某基于姿態測量式穩定微小型吊艙做了搖擺臺實驗,
得到了俯仰軸與方位軸的跟蹤精度,數據表明采用基于姿態測量式穩定方式能夠達到微小型吊艙視軸穩定的功能,同時還大大節省了吊艙內部空間,更有助于吊艙內部的散熱,因此基于姿態測量穩定技術對于微小型吊艙來說,不失為一種有效的穩定方式。
[1] 陸元九.慣性器件(上冊)[M].北京:中國宇航出版社,1993. LU Yuan-jiu.Initial devices(Vol.1)[M].Beijing:China Aerospace Press,1993.
[2] 陸元九.慣性器件(下冊)[M].北京:中國宇航出版社,1993. LU Yuan-jiu.Initial devices(Vol.2)[M].Beijing:China Aerospace Press,1993.
[3] 王連明.機載光電平臺的穩定與跟蹤伺服控制技術研究[D].中國科學院長春光學精密機械與物理研究所,2002. WANG Lian-ming.Study of stability control technology of airborne photoelectric platform and tracking servo[D]. Changchun Optical Precision Machinery and Physics Research Institute of Chinese,2002.
[4] 傅建綱.慣性平臺穩定回路的設計研究[D].哈爾濱工程大學,2005. FU Jian-gang.Design and research of inertial platform stabilization loop[D].Harbin Engineering University,2005.
[5] 賈琳,孟偉鋒.慣性平臺穩定回路的雙閉環控制[J].科學技術與工程,2009,9(5):1147-1149. JIA Lin,MENG Wei-feng.Double loop of inertial platform stabilization loop control[J].Science Technology and Engineering,2009,9(5):1147-1149.
[6] 畢永利,劉洵,葛文奇.機載多框架陀螺穩定平臺速度穩定環設計[J].光電工程,2004,31(2):16-18. BI Yong-li,LIU Xun,GE Wen-qi.Airborne multi frame
[7] gyroscope stabilized platform velocity stabilized loop design [J].Opto Electronic Engineering,2004,31(2):16-18.
[7] 黎志強,許兆林,徐景碩.機載光電跟蹤平臺的控制系統設計[J].電光與控制,2009,16(11):60-63. LI Zhi-qiang,XU Zhao-lin,XU Jing-shuo.Design of system of airborne electro-optical tracking system[J]. Electro Optic and Control,2009,16(11):60-63.
[8] 周瑞青,劉新華,史守峽,王開斌.捷聯導引頭穩定與跟蹤技術[M].北京:國防工業出版社,2010. ZHOU Rui-qing,LIU Xin-hua,SHI Shou-xia,WANG Kaibin.Strapdown seeker stabilization and tracking of missile technology[M].Beijing:National Defense Industry Press,2010.
The Micro Servo Pod Based on the Carrier's Attitude Measurement
SONG Xia,DING Zhu-shun,DING Wei,JIANG Hong-xiang,ZHANG Wei
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
A pitch/yaw semi-strapdown optical platform stabilization technology based on stepper motor has been proposed to meet the demand of optical axis stability and target tracking on micro UAV pod.The tri-axial attitude motion of aircraft can be measured by the inertial device on the foundation bed of pod.The optical axis inertial space stability can be achieved by controlling the optical platform pitch and yaw servo system.The system uses stepper motor as actuator.According to the features of stepper motor,this essay deducts the relationship between the rolling rate and controlling variable. Therefore,cutting out the differential speed link in the usual strapdown stabilization technique,we can draw a new theory about immutability based on feedforward control.The design of decoupled instruction allocation makes a two-axis coupling system into two independent single axis systems.In the single axis control,the essay design proportional control and proportional integral control algorithm respectively to achieve the control and tracking stability of optical axis.Finally,the simulation in Matlab/Simulink and the experiment of vacillation demonstrate the stabilization technique based on attitude measurement can achieve the optical axis stability of micro UAV pod.
optical axis stabilization;stepper motor;stabilization technique based on attitude measurement
U666.1
A
1674-5558(2016)01-01071
10.3969/j.issn.1674-5558.2016.03.007
2015-02-06
宋夏,男,碩士,研究方向為導航、制導與控制。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
