基于Maxwell的混合式步進電機的仿真設計和結構分析
2016-09-23 03:32:34丁亞軍2
導航與控制 2016年3期
賈 博,丁亞軍2,楊 通
(1.中國航空綜合技術研究所,北京100028;2.中國航天科技集團公司,北京100048;3.北京航天控制儀器研究所,北京100039)
基于Maxwell的混合式步進電機的仿真設計和結構分析
賈 博1,丁亞軍2,楊 通3
(1.中國航空綜合技術研究所,北京100028;2.中國航天科技集團公司,北京100048;3.北京航天控制儀器研究所,北京100039)
介紹了一種太陽能帆板驅動系統用混合式步進電機的設計和仿真方法,采用該方法得到了混合式步進電機的最佳齒形和結構數據。提出了一種等效二維有限元模型,將三維磁路轉化為平面磁路,該模型有較高的仿真精度,同時對計算機的要求較低。利用該模型對不同的齒寬齒距比、齒寬齒高比和常用的結構形式進行比較,得出該電機的最優方案;同時,對混合式步進電機定轉子不同齒距的結構進行仿真,得出其性能指標,分析不同情況的效果。
混合式步進電機;有限元分析;保持力矩
0 引言
混合式步進電機是一種定子激磁,轉子帶有永磁體,定轉子磁極多齒結構的電機。其轉子分為2段或2的倍數段,相鄰2段鐵芯相互錯開1/2齒距,中間夾有軸向充磁的永磁體,轉矩由定子繞組磁勢和轉子永磁磁場相互作用產生[1]。由于在開環控制領域具有較高的精度,混合式步進電機廣泛應用于空間、辦公自動化和工業自動化等領域[2-4]。我們知道,步進電機傳統的力矩計算是通過齒層比磁導法實現的,但是該方法對普通磁阻式的步進電機具有較高的精度,由于混合式步進電機轉子存在軸向磁路,氣隙磁密分布復雜,用齒層比磁導法計算誤差較大;三維有限元分析是一種較為精確的分析方法,能夠實現軸徑向磁路的耦合,最大程度地還原電機的實際磁場情況,但是,由于步進電機的氣隙相對于定轉子齒寬等結構非常小,通常只有幾道,所以要實現氣隙的多層剖分,達到較好的網格效果,網格數往往達到上百萬甚至更多,在沒有較好的硬件支持下,計算時間相當長,甚至無法啟動計算。本文提出一種二維模型,它將定轉子展開,形成二維磁路,并將具有軸向磁路的磁鋼,等效投影到二維磁路當中。
1 二維有限元等效方法
混合式步進電機力矩參數齒層比磁導法計算的數學模型:

以四相混合式步進電機為例,電機的等效二維模型如圖1所示,定子極、軛、定轉子的小齒寬和高、轉子磁鋼的厚度均按實際尺寸建立,圓周上的8個極按順時針方向從1~8編號,位置關系如圖1所示,1號極的小齒與轉子對齊,2號極小齒與轉子錯1/4齒距,3號極小齒與轉子錯半個齒距,4號極小齒與轉子錯3/4個齒距,5號極小齒與轉子錯半個齒距,6號極小齒與轉子錯3/4個齒距,7號極小齒與轉子齒對齊,8號極小齒與轉子錯1/4個齒距。磁鋼面積S是根據整個電機各段磁鋼的面積總和均布在兩轉子之間。為了形成完整的磁路,兩段軛之間由低磁阻材料等效,在該部分的磁壓降可忽略不計。
利用上述模型對用電機進行了仿真,并加工了樣機,如圖2所示,經計算樣機額定工作狀態下保持力矩為 318mN·m,空載定位力矩為99.75 mN·m;而實際試驗數據樣機保持力矩為307 mN·m,定位力矩為107 mN·m;保持力矩和定位力矩的計算有較高精度。計算波形數據與實測波形數據如圖3和圖4所示,仿真數據能夠較好地反映實際情況。

圖1 二維有限元建模Fig.1 2D finite element model of the hybrid stepper motor

圖2 混合式步進電機樣機Fig.2 Prototype hybrid stepper motor

圖3 樣機有限元計算保持力矩波形Fig.3 Holding torque based Maxwell

圖4 樣機實測保持力矩波形Fig.4 Holding torque based actual measurement
2 電機參數分析
2.1齒寬、齒高對保持力矩和定位力矩的影響
利用上述模型對電機的一些重要參數進行仿真,對定子齒寬齒距比0.35~0.5、齒高齒距比0.35~0.5范圍內進行掃描,仿真分析得到數據如表1和表2所示。
從表1和表2可以看出,齒高對保持力矩和定位力矩的影響很小,而齒寬的影響相對較大,保持力矩在0.38的時候達到最大,定位力矩在齒寬齒距比為0.35~0.5的范圍內,隨該值的增大而減小。綜合考慮兩方面影響,選取齒寬齒距比為0.42~0.44間為宜,這種情況下保持力矩雖然不是最大,但下降幅度較小,定位力矩相對較小。上述觀點可以由圖5更為形象地表述,圖5中所示波形為定轉子齒寬0.68mm、0.79mm、0.83mm以及定子齒寬0.82轉子齒寬0.68情況下的保持力矩的仿真結果,隨著齒寬變大,保持力矩峰值變小,并變得平緩;此外,從5圖中還可以看出,如果想兼顧波形和幅值,定轉子不同齒寬是一個較好的處理方法,這種情況可以獲得較好的波形,而且對幅值的影響較小。

表1 保持力矩峰值數據Table 1 Peak date of holding torque
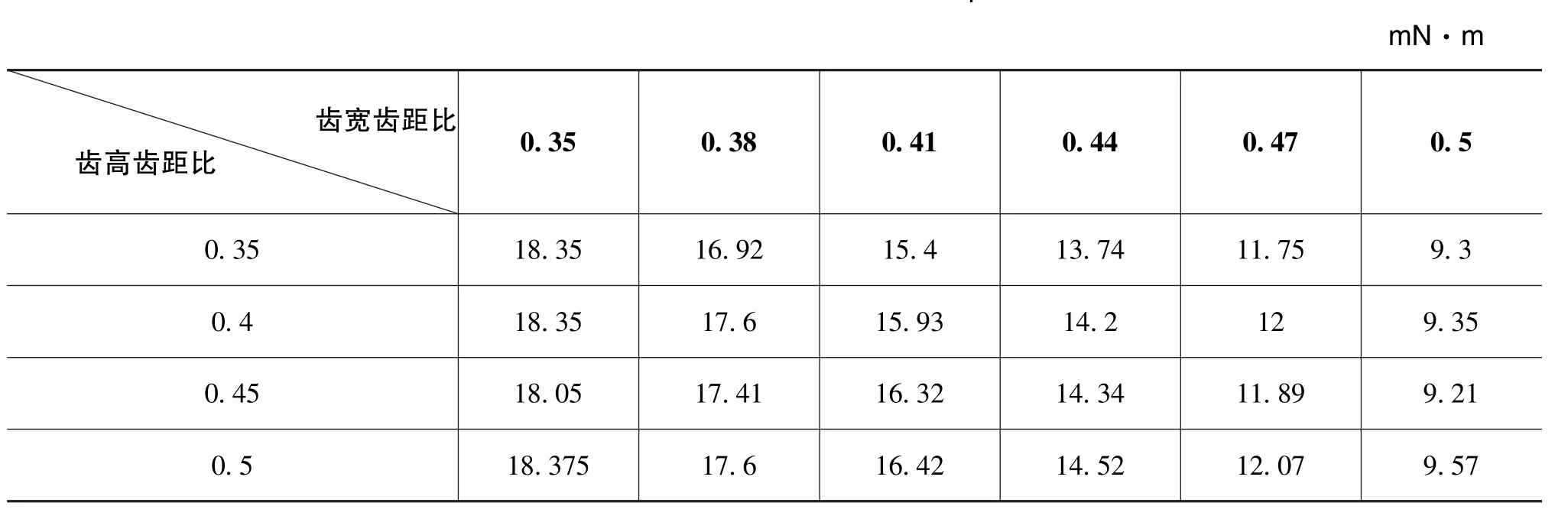
表2 定位力矩峰值數據Table 2 Peak date of detent torque

圖5 各種齒寬保持力矩波形Fig.5 Variation of holding torque-different tooth width
2.2減小定位力矩、改善保持力矩波形方法分析
通過上述分析可以知道,選擇合適的齒寬能夠減小定位力矩、改善保持力矩波形。混合式力矩電機的定位力矩由不通電狀態下電機磁共能的變化產生,即定位力矩的大小等于磁共能變化的梯度:

下面我們對時下常用的一些減小定位力矩、改善保持力矩波形的方法進行分析、比較。常用的方法有:定轉子不同齒寬,圓形槽底、梯形槽、定轉子不同齒距等。
保持其他參數不變,對不同定轉子齒寬配合進行仿真,比較性能參數值如表3所示。首先,從第一種配合情況的數據看出,定轉子不同齒寬可以減小定位力矩,而且差異較大時效果明顯;其次,齒寬不同時,各種組合的性能接近,沒有大的區別,但定轉子等齒寬的情況比不等齒寬的情況保持力矩和定位力矩都大10%左右。
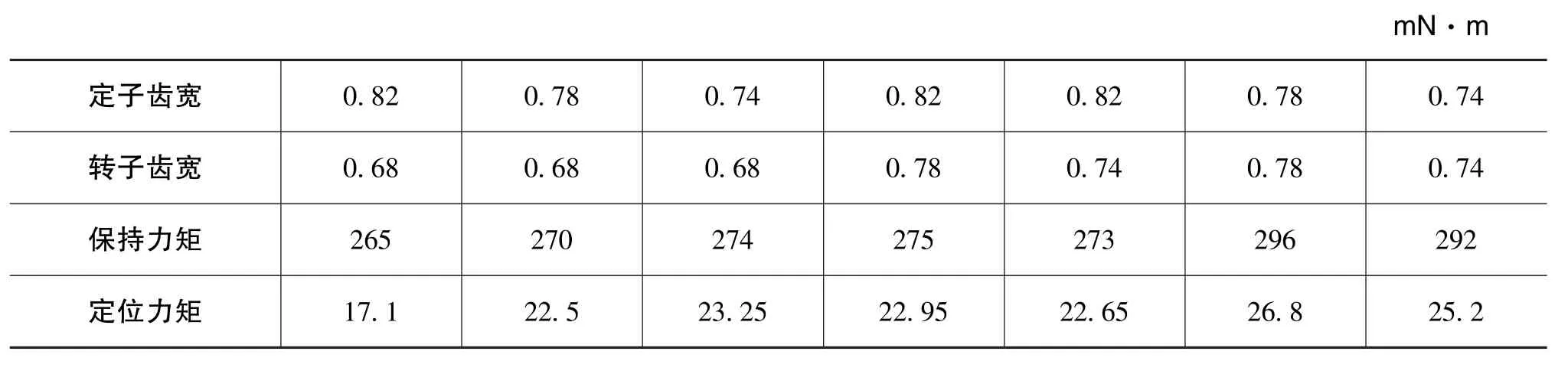
表3 不同齒寬組合的性能參數比較Table 3 Variation of the characteristics-different tooth width combination
圖6為采取圓形槽底、梯形槽、定轉子不同齒距等方法的保持力矩波形,從圖6中可以看出,梯形槽方法沒有明顯效果,同時力矩峰值也是最大的;采用圓形槽底的方法,可以改善力矩波形,減小諧波含量,效果較為明顯;而不同齒距的方法可以基本消除高次諧波,明顯減小定位力矩,保持力矩波形接近正弦波,是效果最好的方案,當然,力矩峰值也相應明顯減小。圖7是等齒距與不等齒距情況下,定位力矩波形的仿真結果比較,可以看出效果十分明顯。
3 結論
本文通過一種等效的2D模型,對混合式步進電機中大家比較關注的結構和參數進行比較,對每種結構和參數的保持力矩和定位力矩進行比較,其中涉及齒寬齒距比、齒高齒距比、定轉子不同齒寬,圓形槽底、梯形槽、定轉子不同齒距等。通過比較得出:齒寬齒距比選取0.42~0.44間為宜,若追求大保持力矩可以選取更小的齒寬;在減小定位力矩的方案中,定轉子不同齒距是最好的方案,定轉子不同齒寬也有10%的減小效果,但同時也會減小10%的保持力矩,在追求低定位力矩的情況下可以選用。對一種電機方案試制了樣機并進行測試,測試結果能夠較好地反映仿真數據。

圖6 齒部結構對保持力矩的影響Fig.6 Variation of holding torque-different tooth configuration

圖7 齒距改變前后定位力矩Fig.7 Variation of detent torque-different tooth configuration
[1] 王宗培.微特電機設計程序[M].上海:上海科技出版社,1983. WANG Zong-pei.Design process of special type motor [M].Shanghai: ShanghaiScienceandTechnology Press,1983.
[2] B.C.Kuo.Step motors and control systems[M].SRL Publishing,1979.
[3] Hunt.Motors take it a step at a time[J].Design Engineer Magazine,March,1991.
[4] T.Kosaka.3 Dimensional finite element analysis of hybrid stepping motors taking inter-lamination gap into account [J].TheInstitutionofElectricalEngineers,2004:534-539.
[5] Praveen R.P.Design and finite element analysis of hybrid stepper motor for spacecraft applications[J].IEEE,2009:1051-1057.
Design of Hybrid Stepper Motor Used for Solar Panel Driven System
JIA Bo1,DING Ya-jun2,YANG Tong3
(1.AVIC China Aero-polytechnology Establishiment,Beijing 100028;2.China Aerospace Science and Technology Corporation,Beijing 100048;3.Beijing Institute of Aerospace Control Devices,Beijing 100039)
The design and simulation method for the hybrid stepper motor(HSM),used for solar panel driven system,is proposed.The HSM's optimal tooth shape and structure are obtained with the method.An equivalent two-dimensional finite element model,which converts three-dimensional magnetic circuits to planar ones,is introduced.The model provides highly accurate simulation results and spends lower computational cost.The models with different tooth width/tooth pithratio,tooth width/ tooth height ratio and tooth shape are simulated and compared,and the optimal structural design is achieved.Meanwhile,the performances of HSMs having different stator/rotor tooth pitch are also analyzed with the proposed model.
hybrid stepper motor;finite element analysis;holding torque
TM3
A
1674-5558(2016)03-01157
10.3969/j.issn.1674-5558.2016.03.014
2015-07-10
賈博,男,碩士,工程師,研究方向為電機本體設計。
猜你喜歡
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
