基于過程神經網絡的六維力傳感器動態解耦研究
2016-10-10 05:16:05許德章張家敏
重慶文理學院學報(社會科學版) 2016年5期
關鍵詞:方向
王 毓,許德章, 張家敏, 許 曙
(安徽工程大學機械與汽車工程學院, 安徽 蕪湖 241000)
?
基于過程神經網絡的六維力傳感器動態解耦研究
王毓,許德章, 張家敏, 許曙
(安徽工程大學機械與汽車工程學院, 安徽蕪湖241000)
六維力傳感器動態解耦方法主要集中于不變性動態解耦方法和迭代解耦方法,其解耦效果取決于建模精度,強耦合情況下解耦誤差大,工程實現復雜.文章針對這一問題提出一種基于過程神經網絡動態解耦算法,將六維力傳感器輸入輸出及網絡權函數進行相同正交基展開,簡化計算過程,求解六維力傳感器輸出輸入耦合關系.實驗結果表明,過程神經網絡在六維力傳感器動態解耦中應用效果良好,為動態解耦提供了一種新方法.
六維力傳感器;動態解耦;過程神經網絡;正交基展開
六維力傳感器是工業機器人工作過程中的重要輔助部件,常用于機器人自動焊接、打磨等有力反饋的場合.工業智能化的快速發展對六維力傳感器的精度要求越來越高,現有的六維力傳感器大多采用彈性梁結構并且都是先制造后標定,其結構和制造工藝必然使六維力傳感器存在維間耦合[1].針對這一問題,學者們從結構設計和解耦算法兩方面著手研究,結構上先后提出了橫梁、豎梁、復合梁、筒式和雙E型膜等形式.解耦算法主要集中在靜態解耦方面,例如基于線性標定和基于最小二乘線性擬合的解耦算法都是將六維力傳感器看成線性系統.在動態解耦方面,文獻[2]提出不變性動態解耦方法和迭代解耦方法,從本質上揭示了多維力傳感器輸入輸出之間的動態耦合關系.由于以上兩種方法都是在二階數學模型下提出的,對于三階或三階以上的數學模型,建模精度要求高,計算量大,尤其在強耦合情況下,解耦誤差大,工程實現復雜[2,3].針對目前六維力傳感器動態解耦存在的問題以及六維力傳感器的動態耦合特性,本文提出一種基于過程神經網絡的六維力傳感器解耦方法,過程神經網絡的輸入和權值都可以是連續函數,利用過程神經網絡自動提取六維力傳感器輸入函數的曲線形態和幅值特征,為簡化計算過程引入函數正交基,對輸入函數和網絡權函數進行同一組正交基展開,試圖通過過程神經網絡訓練求出六維力傳感器輸入輸出耦合關系,實現動態解耦[4].
1 基于過程神經網絡的解耦原理
1.1過程神經網絡
過程神經網絡是在人工神經網絡基礎上提出的.它的輸入輸出都可以是時變過程或時變函數,可描述輸出對于輸入在時間軸上的累積效應或聚合結果.這種特性為解決泛函逼近和泛函尋優等問題提供了一種新的方法[5,6].
單個過程神經元由加權、聚合和激勵3部分組成,其輸入與輸出之間的函數關系為:
Y=f((W(t)⊕X(t))?K(·)-θ)
(1)
其中,X(t)表示過程神經元輸入函數,W(t)表示過程神經元權值函數,K(·)表示過程神經元聚合基函數,θ表示過程神經元輸出閾值,f表示過程神經元激活函數,Y表示過程神經元輸出函數,“⊕”表示某種空間聚合運算,“?”表示某種時間(過程)聚合運算.過程神經網絡由若干個過程神經元組成,用來解決多輸入多輸出時變系統的系統辨識、過程控制及優化等.過程神經網絡模型如圖1所示.
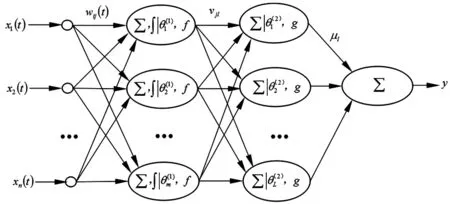
圖1 過程神經網絡模型

θj(1)]-θl(2)}
(2)
1.2基于正交基展開的學習算法
由于過程神經網絡輸出函數中含有對時間的積分運算,計算過程十分復雜.為了簡化訓練過程,在輸入函數空間內引入一組標準正交基,將輸入函數和網絡權值函數表示為該組正交基的展開形式,將泛函數的尋優問題轉化為權值函數基展開式系數和神經元激勵閾值的尋優問題[8].
設b1(t),b2(t),…,bL(t)為輸入函數空間內的一組標準正交基函數,將輸入函數X=(x1(t),x2(t),…,xn(t))表示為該組基函數的有限項展開形式,ail為xi(t)展開式中相對于基函數bl(t)的系數[9-11],即
(3)
將權值函數wij(t)也用b1(t),b2(t),…,bL(t)的展開形式表示,記為
(4)
將(3)式、(4)式帶入(2)式中,過程神經網絡輸出為:
(5)

2 基于過程神經網絡的六維力傳感器動態解耦
2.1六維力傳感器動態輸入輸出數據獲取
基于過程神經網絡對六維力傳感器進行動態解耦,首先要建立六維力傳感器過程神經網絡動態模型.六維力傳感器的輸出信號作為過程神經網絡模型的輸入信號,六維力傳感器的加載力信號作為過程神經網絡的輸出信號.六維力傳感器的輸入輸出信號由六維力傳感器動態標定實驗采集得到.圖2為自行研制的六維力傳感器動態標定實驗臺.
動態標定實驗臺采用電磁激振器加載方式,產生頻率和幅值連續可控的諧波激勵力.改變傳感器安裝位置,調整電磁激振器位置,從傳感器不同方向(通道)加載,將壓電陶瓷驅動器電壓調整到10 V,頻率為0~300 Hz的掃頻信號分別加載到傳感器的各個方向,每隔20 Hz采集傳感器六路輸出電壓信號[12].
選取動態標定實驗獲取的96個六維力傳感器動態輸入輸出數據作為網絡訓練樣本,訓練樣本選擇如表1至表6.
2.2實驗仿真及結果分析
從表1至表6各方向輸入輸出數據可以看出,單個方向加載時其他5個方向確實存在著不同程度的耦合輸出,且FX方向和FY方向加載時其他各方向耦合關系類似,MX方向與MY方向加載時其他各方向的耦合關系類似.這與六維力傳感器彈性體的對稱分布結構對應.下面利用基于勒讓德正交多項式展開的過程神經網絡對表1至表6的實驗數據進行處理.
采用基于勒讓德多項式展開學習算法對網絡進行訓練.參數設置如下[13,14]:過程神經元輸入神經元節點數,輸出神經元節點數,隱藏層神經元節點數L=9.誤差精度為ε=0.05,正交基函數項為6,學習速度為0.05,慣性系數取0.25,最大迭代次數M=6 000.當網絡訓練1 764次時,達到設定的誤差精度,網絡收斂,最大誤差為0.05.訓練的誤差曲線如圖3所示.
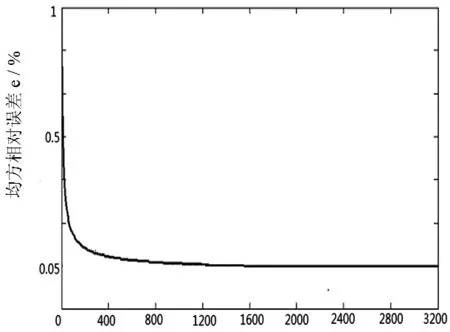
圖3 網絡誤差訓練圖
網絡訓練后得到的輸入層與隱藏層之間的連接權值、隱藏層與輸出層之間的連接權值以及隱藏層的輸出閾值如表7、表8和表9所示.
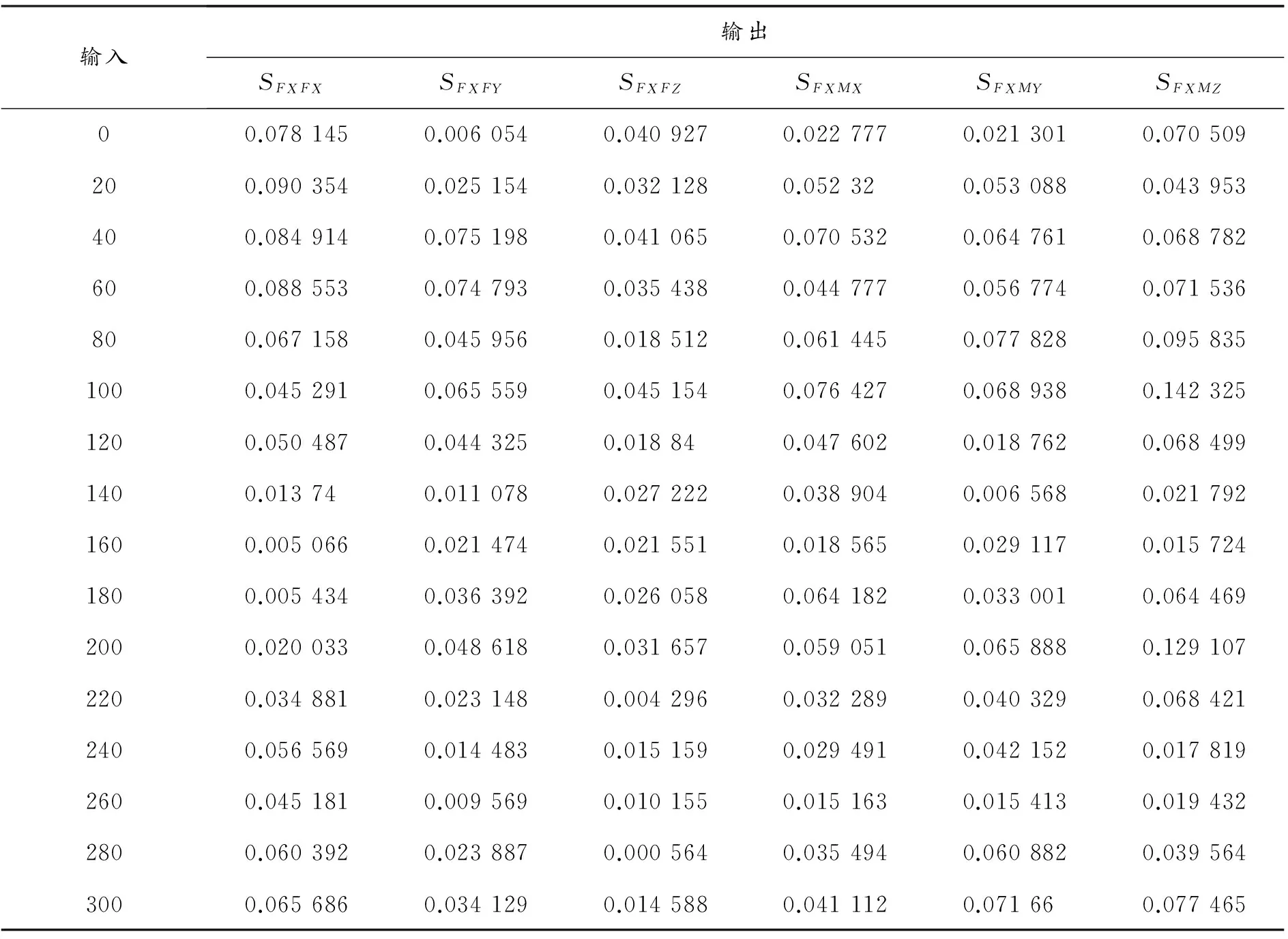
表1 FX方向(頻率0~300 Hz)加載時其他方向的輸出
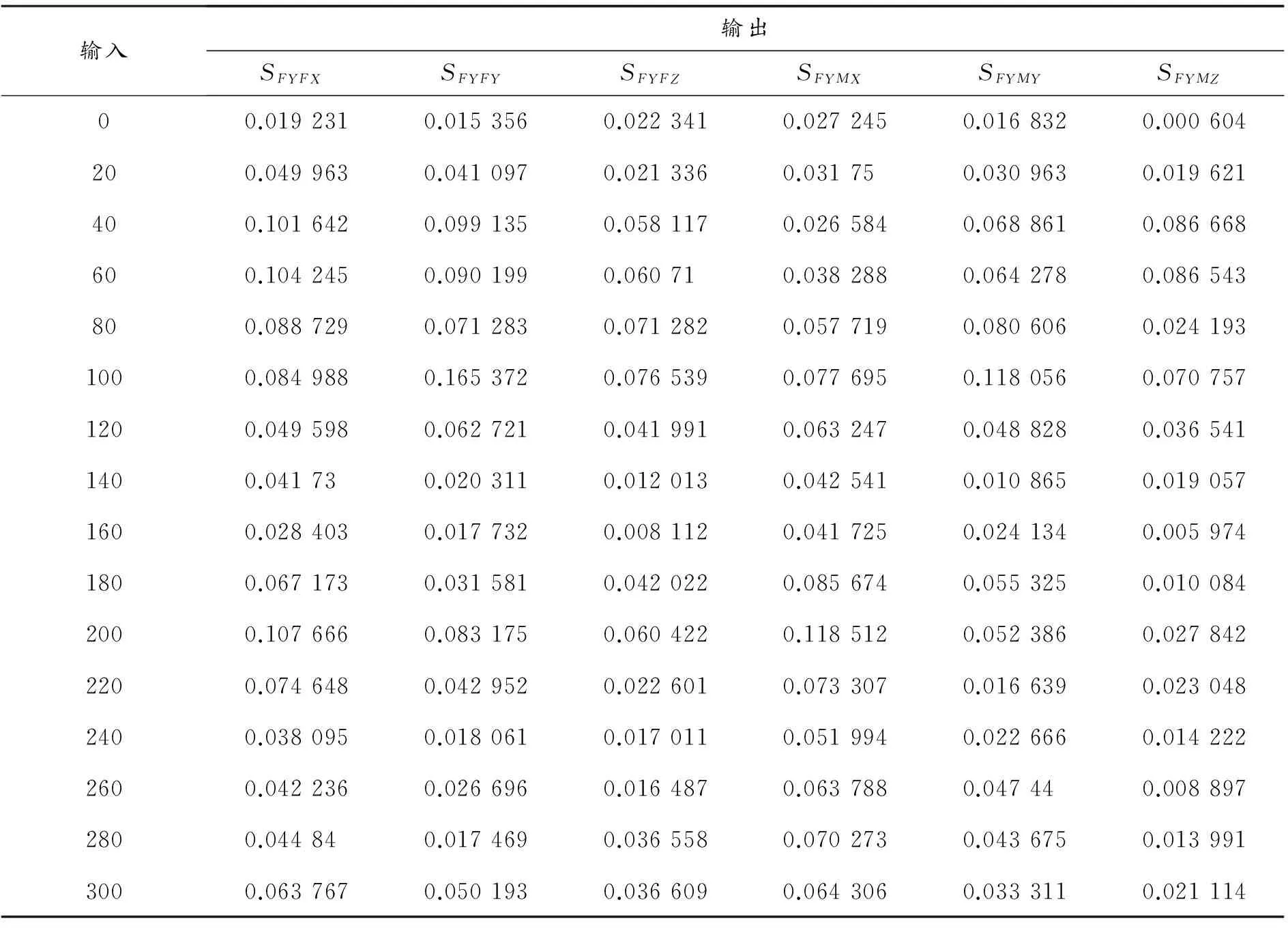
表2 FY方向(頻率0~300 Hz)加載時其他方向的輸出
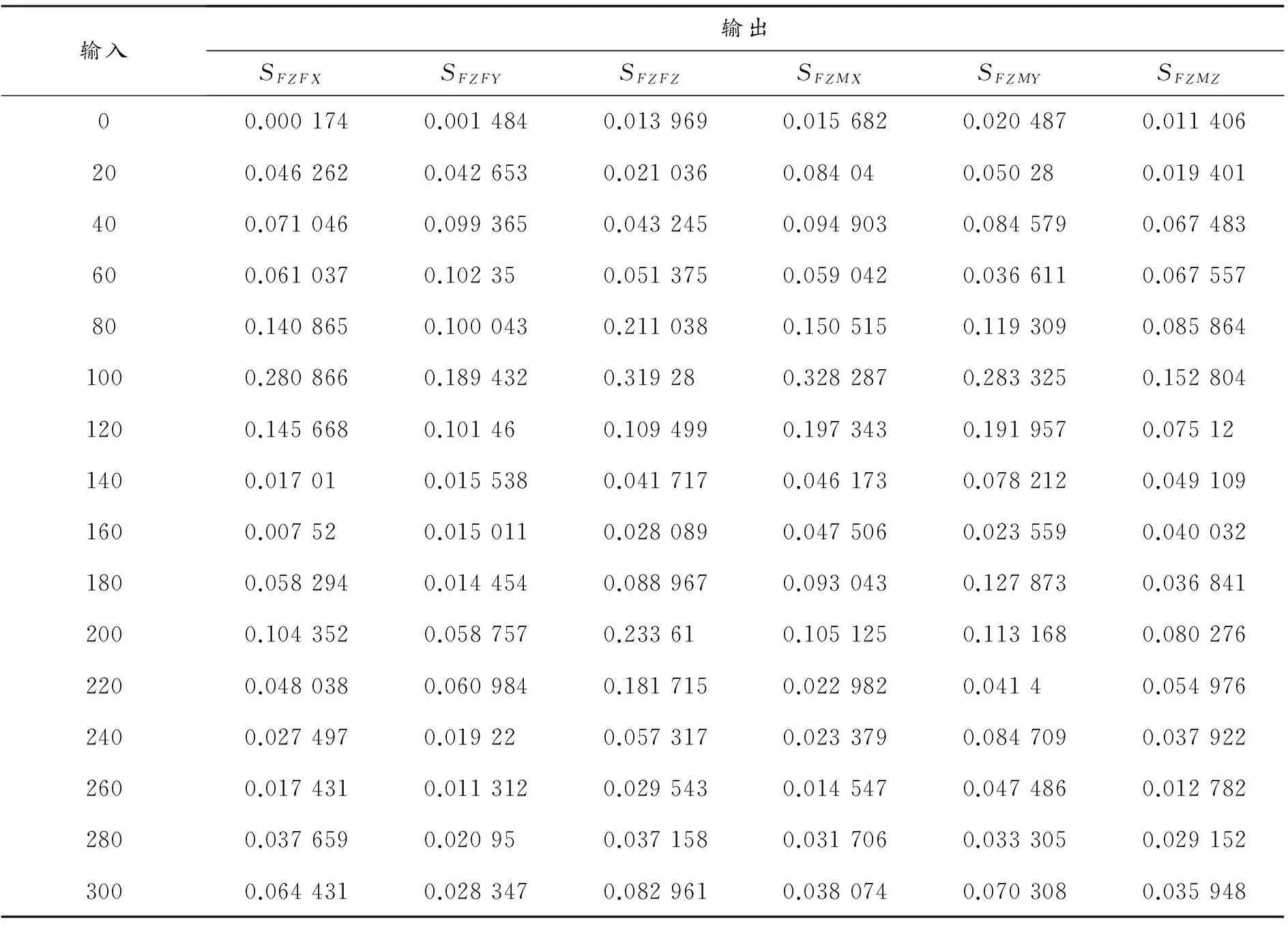
表3 FZ方向(頻率0~300 Hz)加載時其他方向的輸出
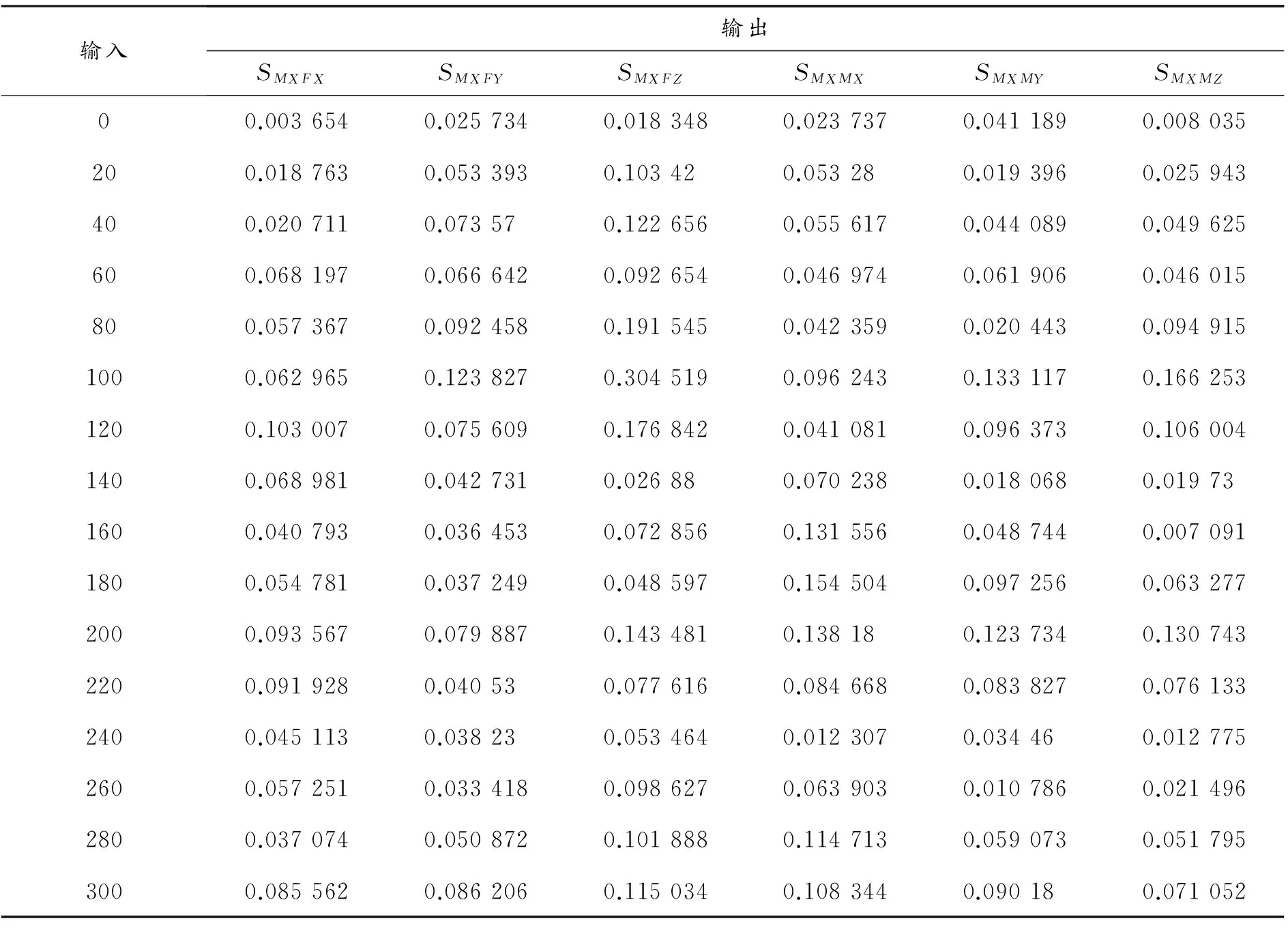
表4 MX方向(頻率0~300 Hz)加載時其他方向的輸出
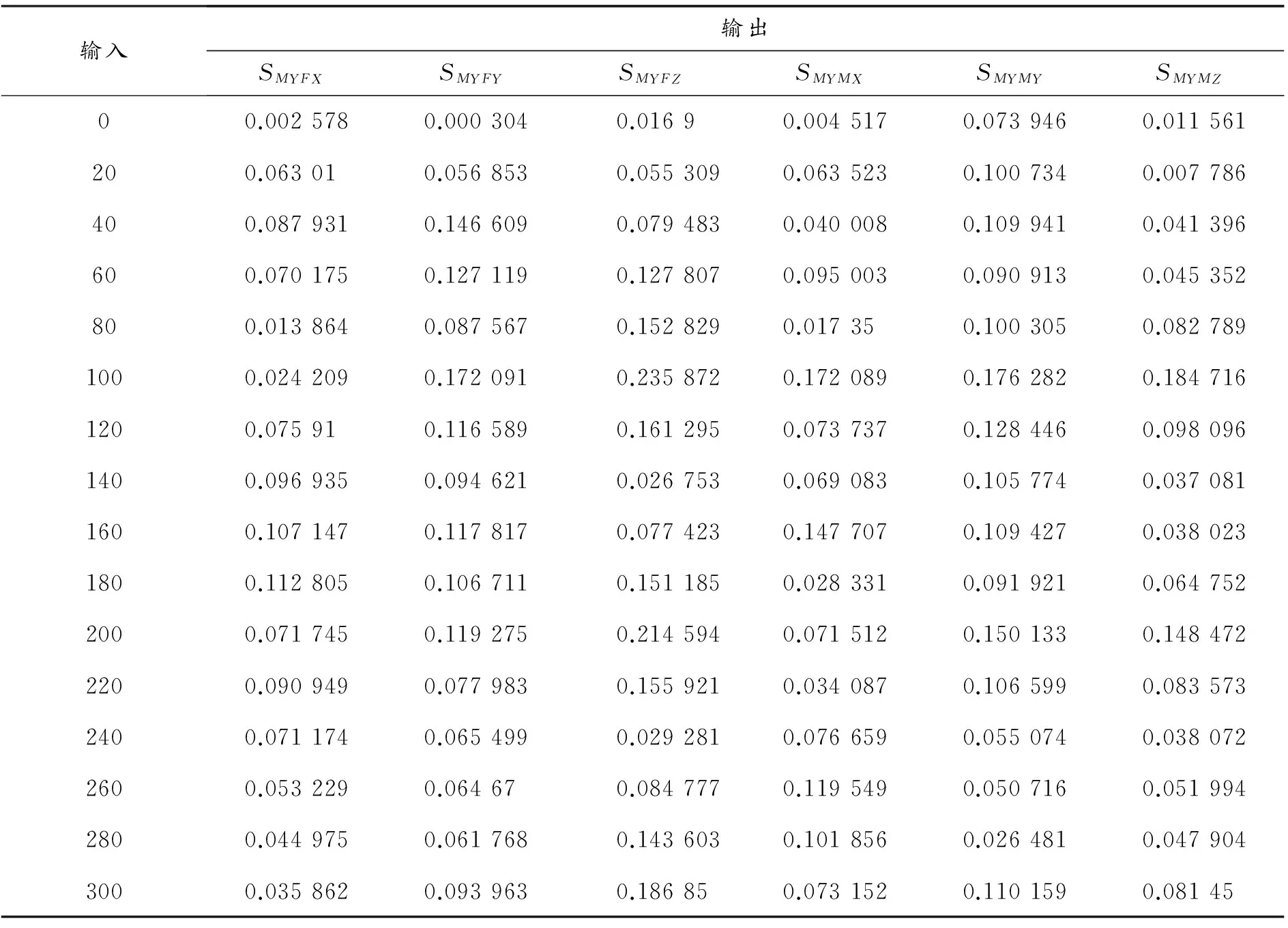
表5 MY方向(頻率0~300 Hz)加載時其他方向的輸出
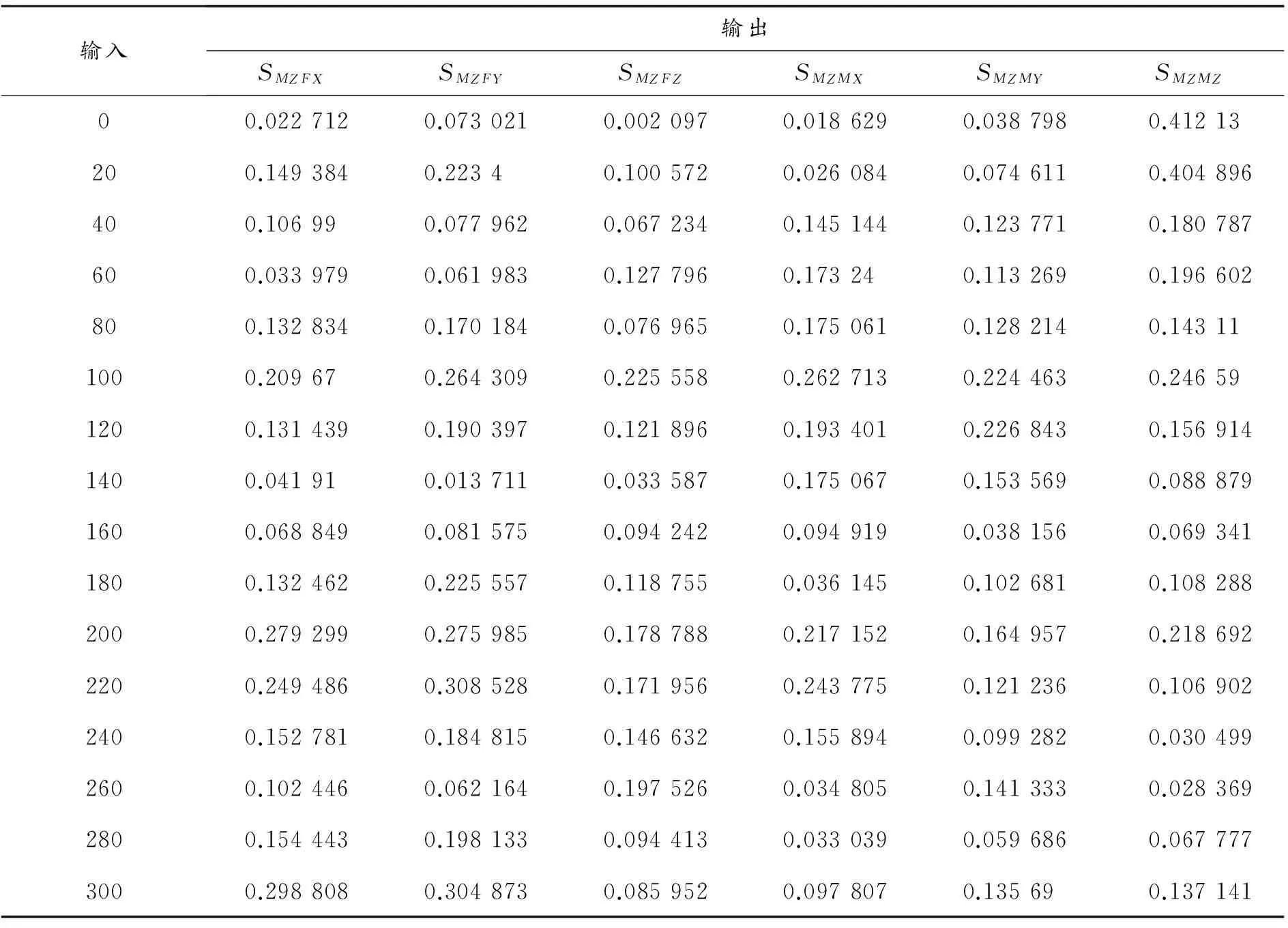
表6 MZ方向(頻率0~300 Hz)加載時其他方向的輸出
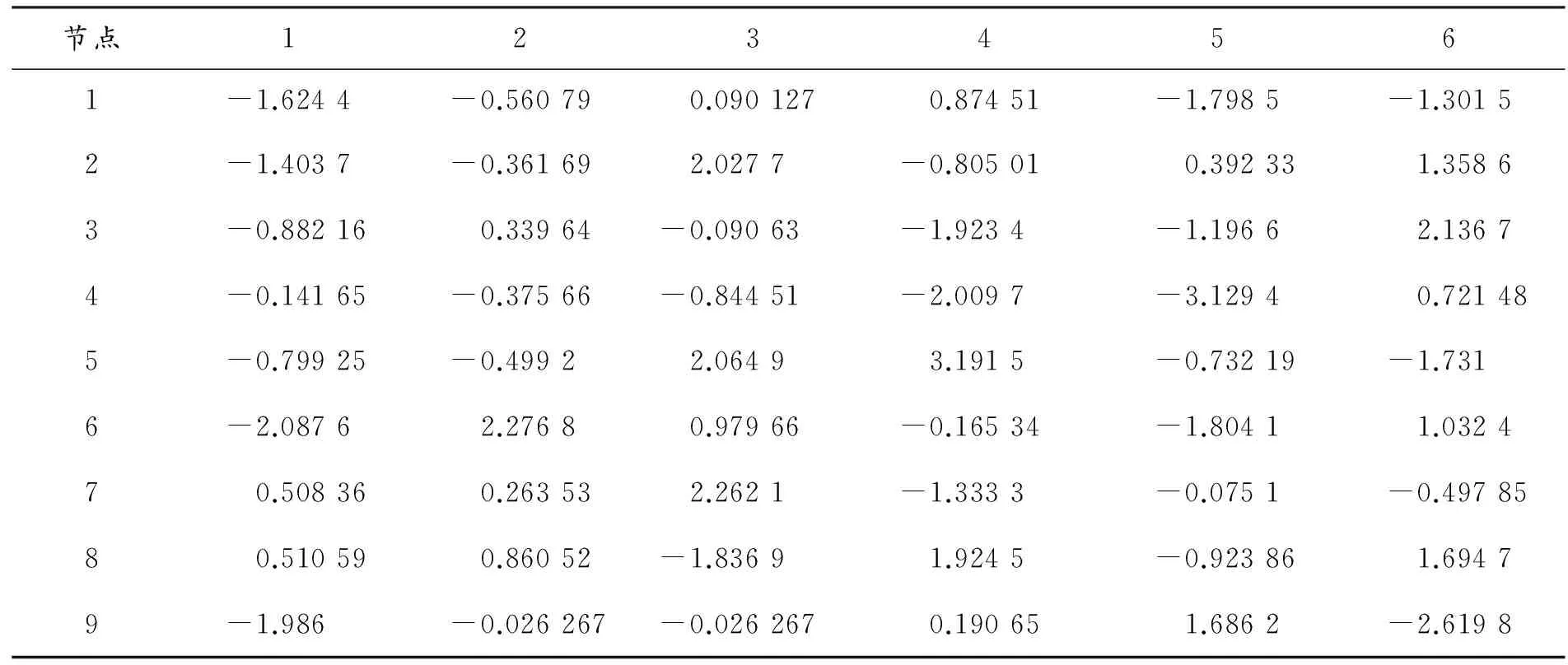
表7 輸入層與隱藏層之間的連接權值

表8 隱藏層與輸出層之間的連接權值

表9 隱藏層與輸出層之間的閾值
3 結語
為解決六維力傳感器動態解耦問題,利用過程神經網絡對六維力傳感器進行建模,通過六維力傳感器動態標定實驗臺獲取六維力傳感器動態輸入輸出數據,通過過程神經網絡對離散的輸入輸出數據進行非線性擬合,將六維力傳感器的輸出(輸入)數據作為過程神經網絡的輸入(輸出)數據,通過MATLAB神經網絡工具箱對數據進行處理,設定誤差值.當網絡訓練1 764次時,網絡收斂.從圖2可看出,網絡訓練效果良好,表7至表9為網絡訓練得到的輸入層與輸出層之間的連接關系,即為六維力傳感器耦合關系,完成對六維力傳感器動態輸入輸出的解耦.
[1]王國泰,易秀芳,王理麗.六維力傳感器發展中的幾個問題[J].機器人,1997,19(6):474-478.
[2]徐科軍,殷銘,張穎.腕力傳感器的一種動態解耦方法[J].應用科學學報,1999,17(1):39-44.
[3]徐科軍,李成.多維力傳感器迭代動態解耦方法[J].中國機械工程,1999,10(1):46-49.
[4]何新貴.過程神經網絡[M].北京:科學出版社,2007.
[5]蔡月芹,朱景福,費麗君.基于權函數正交基展開的過程神經元網絡學習算法[J].中國新技術新產品,2009(7):20-21.
[6]張強,許少華,富宇.基于過程神經網絡的儲層微觀孔隙結構類型預測[J].化工自動化及儀表,2014,42(8):839-843.
[7]丁剛,徐敏強,侯立國.基于過程神經網絡的航空發動機排氣溫度預測[J].航空動力學報,2009,24(5):1035-1039.
[8]鄧韌,李著信,樊友洪.基于多種正交基函數的模塊化過程神經元網絡[J].計算機工程與應用,2005(30):69-73.
[9]許少華,劉揚,何新貴,等.基于過程神經網絡的水淹層自動識別系統[J].石油學報,2004,25(4):54-57.
[10]孫智源.基于過程神經網絡集成的航空發動機性能衰退預測[D].哈爾濱:哈爾濱工業大學,2010.
[11]周繼.基于過程神經網絡的動態系統模式識別方法研究[D].大慶:大慶石油學院,2008.
[12]董躍龍. 六維力傳感器動態解耦方法的研究[D]. 蕪湖:安徽工程大學,2015.
[13]陳明.MATLAB神經網絡原理與實例精解[M].北京:清華大學出版社,2013.
[14]朱凱,王正林.精通MATLAB神經網絡[M].北京:電子工業出版社,2010.
(責任編輯穆剛)
Research on dynamic decoupling of six-axis force sensor base on the procedure neural networks
WANG Yu , XU Dezhang, ZHANG Jiamin, XU Shu
(College of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu Anhui 241000, China)
The main dynamic decoupling method of six-axis force sensor focused on constance dynamic decoupling method and the iterative dynamic decoupling method. In the case of the strong coupling, decoupling will produce large errors and the project is complex. Aiming at the problem, this paper offers a dynamic decoupling algorithm for this problem based on process neural network, which expand the input and output functions of the six-axis force sensor and the connection weight functions of the network based on orthogonal function basis expanses and simplify calculation process. Also it is to solve the relationship of the six-axis force sensor and the input, output of coupling. Experimental results show that the process of application of neural network has good effect on the six-axis force sensor dynamic decoupling and provides a new method for the dynamic decoupling.
six-axis force sensor; dynamic decoupling; procedure neural networks; orthogonal basis expansion
2016-03-26
國家自然科學基金資助項目(51175001).
王毓(1990—),男,安徽舒城人,碩士研究生,主要從事機器人與信息感知方面的研究;許德章 (1964—), 男,安徽蕪湖人,教授,博士,主要從事機器人感知及機器人機構與控制方面的研究.
TP212.12
A
1673-8004(2016)05-0034-07
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
