基于CANopen的DSP和ABB變頻器的通信與實現
2016-10-14 06:07:00王秀蓮劉昭明畢大強
電氣技術 2016年3期
王秀蓮劉昭明畢大強
(1. 沈陽理工大學,沈陽 1101682;2. 清華大學電動機系電力系統國家重點實驗室,北京 100084)
?
基于CANopen的DSP和ABB變頻器的通信與實現
王秀蓮1劉昭明1畢大強2
(1. 沈陽理工大學,沈陽1101682;2. 清華大學電動機系電力系統國家重點實驗室,北京100084)
針對于CAN總線成本低、數據傳輸距離遠和傳輸速率快等特點。本文以DSP作為主節點,變頻器為從節點,利用CAN應用層協議CANopen實現了變頻器的遠程控制。通過對CCS開發平臺上程序的調試,完成了DSP和變頻器的通信。同時介紹了變頻器RCAN-01適配器參數配置、通信參數含義及通信程序。通過該模塊用戶可以由DSP向變頻器發送控制命令或者獲取一些實時參數值,進而對現場工作狀態進行控制監測。CAN通信的實現對于現場總線控制具有較強的操作性和實用性。
CAN;ABB變頻器;數字信號處理器;現場總線
CAN(Controller Area Network)即控制器局域網總線,最早應用于20世紀80年代末的汽車和電子產品的研發中。是一種用于實時應用的串行通信協議總線,具有抗干擾性強、通信速率高和開發靈活等優點。針對于CAN這些優越的性能,國內的一些大型設備也開始對該協議進行使用,但是大多數CAN控制器只做到鏈路層或停留在通信幀的結構分配上。隨著CAN技術在國內的發展和應用,對于應用層的硬件設計也開始考慮,CANopen是 CAN應用層的一種協議[1-2]。
為了對 CANopen協議的應用和研發,本文以DSP為主站,變頻器為從站,利用 CAN的應用層協議CANopen實現了主站和從站的遠程控制。CAN通信的實現可以使操作員通過主站(DSP)的集成開發平臺CCS對設備進行人性化的控制和完成原動機模擬的實驗,比如水輪機,柴油機和汽輪機等的模擬,其突出的可靠性、準確性在多種現場總線中應用廣泛,可以滿足不同的實時要求。CANopen的實現在DSP的控制中具有不可替代的優勢,為變頻器的高性能應用與靈活控制提供條件。
1 通信系統設計
1.1系統硬件連接
系統通信結構如圖1所示,圖中,DSP和WinXP系統下 CCS軟件共同組成一個上位機開發控制平臺。在 CAN通信中,DSP為主節點,變頻器為從節點,帶動電動機運行。DSP和變頻器之間通過CAN的應用層協議CANopen實現通信,CCS和DSP之間應用仿真器實現程序的燒寫和在線調試。

圖1 硬件連接圖
1.2通信連接方法
本實驗用到了兩條信號線“CAN_H”和“CAN_L”,具體連線圖如圖2所示[2]。DSP開發軟件CCS通過XDS510U-PLUS仿真器與DSP的JTAG口相連,實現DSP程序的開發、在線調試和燒寫。變頻器和異步電動機通過電纜連接。
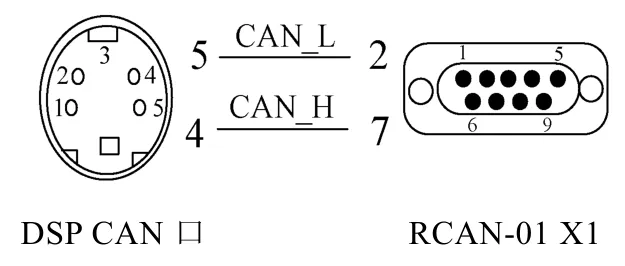
圖2 CAN通信線路圖
2 通信參數設置
2.1RCAN-01
主站(DSP)集成了增強型CAN總線通信接口,變頻器可以通過可選模塊RCAN-01連接到CAN總線系統。通過RCAN-01可以實現以下功能[3]:
1)給變頻器發送控制命令,如起動、停止、運行使能等。
2)接收變頻器控制電動機運行的實際速度或轉矩值。
3)讀取變頻器的狀態值和實際值。
4)改變變頻器的參數值和復位變頻器的故障。
2.2變頻器CANopen通信參數配置
使用 RCAN-01進行通信時必須先將變頻器的參數98.02組參數設置為Fieldbus,此參數用于激活適配器。設置完成后才可以看到51組配置參數,下面是51組參數設置的方法:
1)51.01 Module Type對通信的模型類型選擇,默認為CANopen,用戶無法改變其數值。
2)51.02 Node ID設置變頻器的節點號,設置為1。
3)51.03 BAUDRAT 設置通信的波特率,設置為4,即125kbit/s。
4)51.04 PD021Cfg.Loc設置PDO21組的變量是通過變頻器面板設置還是總線設置。本實驗設置為0,即通過總線進行變量的配置,配置51.05~51.25組參數。
5)51.26 Transparent/Profi設置RCAN-01和變頻器之間的通信協議,設置為2,即應用CANopen協議進行通信。
節點和波特率的設置還可以通過適配器上3個旋轉按鈕S1、S2、S3進行設置。撥碼開關的設置如圖3所示。若通過面板配置,3個按鈕均選擇為0。撥碼開關S1用來設置波特率,S2、S3用來設置變頻器的ID號,設置后的ID=10×S2+S3。顯然,通過撥碼開關設置只能設置0~99之間的節點號,如果設置的ID在100~127時,只能將S2和S3均設置為0后,從變頻器的第51.02組參數設置。完成51組的參數設置還需對電動機的參數進行設置。設置99.05~99.09組對電動機銘牌進行設置。設置參數99.10選擇電動機的辨識模式(辨識勵磁)。其他參數的設置可以根據實際應用進行設置。
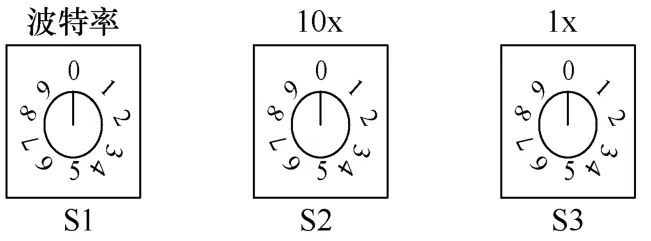
圖3 撥碼開關設置
3 通信程序的設計
3.1CAN和CANopen
CAN是一種實時應用的串行通信協議,CAN層的定義和開放系統互聯模型 Open System Interconnection Model(OSI)一致,表1為OSI開放式互聯模型的各層。CAN的基本協議只包含物理層和數據鏈路層,并沒有規定應用層。在通信應用中需要一個高層協議來定義 CAN消息中的標識符和字節數據的使用。CANopen協議是一個基于CAN應用層的子協議,具有很好的模塊化特性和較高的配置靈活性。
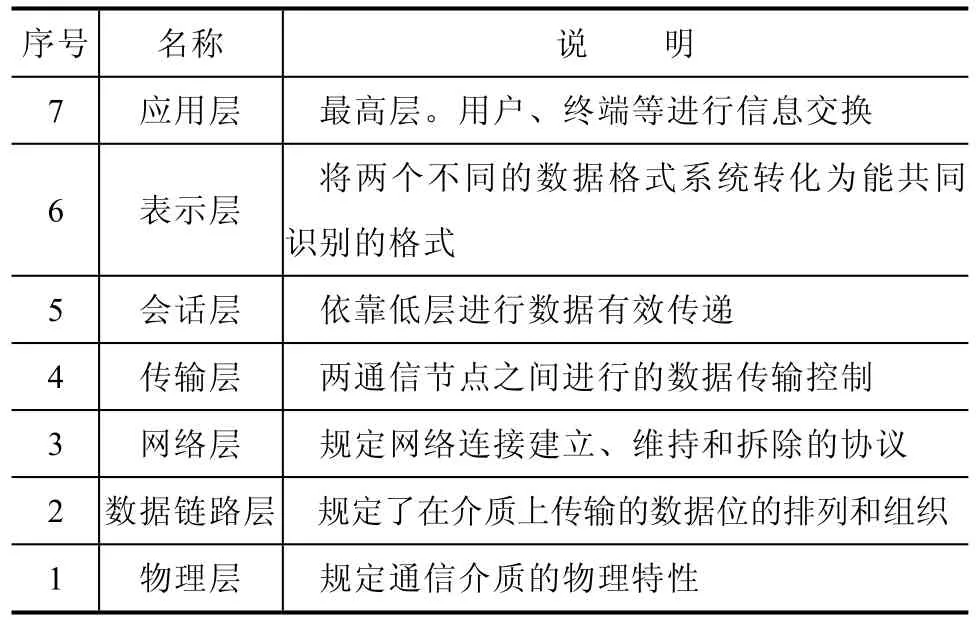
表1 開放系統互聯模型
CAN的數據幀由7個位場組成,其具體格式如圖4所示。CANopen規定了其中的仲裁場(11位標識符和RTR位)和數據場(8位),數據場包含了所需要發送的數據,它的長度為0~8個字節,每個字節包含8位[4]。
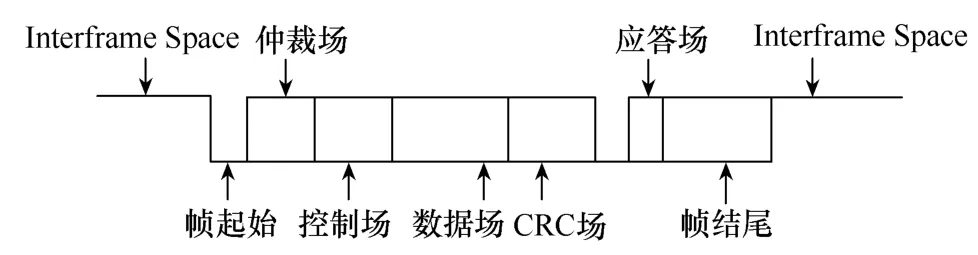
圖4 數據幀格式
3.2CANopen協議設計
CANopen設備由通信部分、對象字典和應用部分3部分組成,其設備模型如圖5所示。通過應用層協議 CANopen和變頻器可以靈活地改變電動機的特性進而完成一些動態試驗的模擬。本實驗通信部分為變頻器的適配器RCAN-01的串口與DSP的CAN口相連接的部分,應用部分連接到應用相關的I/O數據端口,即適配器的輸出部分,與變頻器相連。通信部分和應用部分之間是對象字典,對象字典包含了描述對象和主站執行動作的所有參數,它是CANopen協議的核心部分。
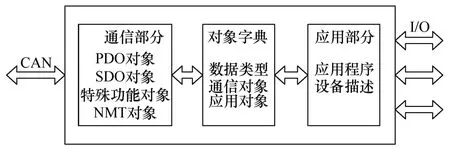
圖5 CANopen設備模型
CANopen通信部分定義了4種通信對象,過程數據對象(PDO)、服務數據對象(SDO)、網絡管理對象(NMT)和預定義報文或者特殊功能對象[5]。
CANopen設備在工作時具有4種狀態,初始化、預運行、運行和停止狀態。本文將部分對象執行的動作作為模塊,將設備所處的狀態作為每種對象動作時的觸發條件,這樣就降低了編程難度,同時簡化了程序。在CANopen協議編寫時,程序的運行狀態流程圖如圖6所示。各觸發點命令含義見表2。
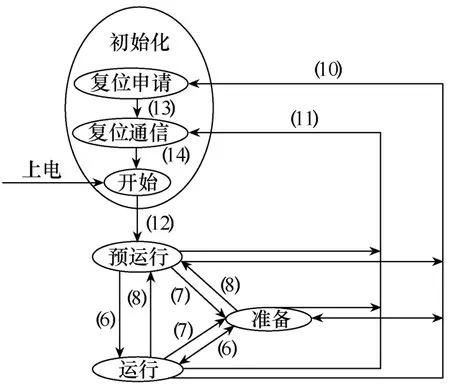
圖6 狀態運行流程圖
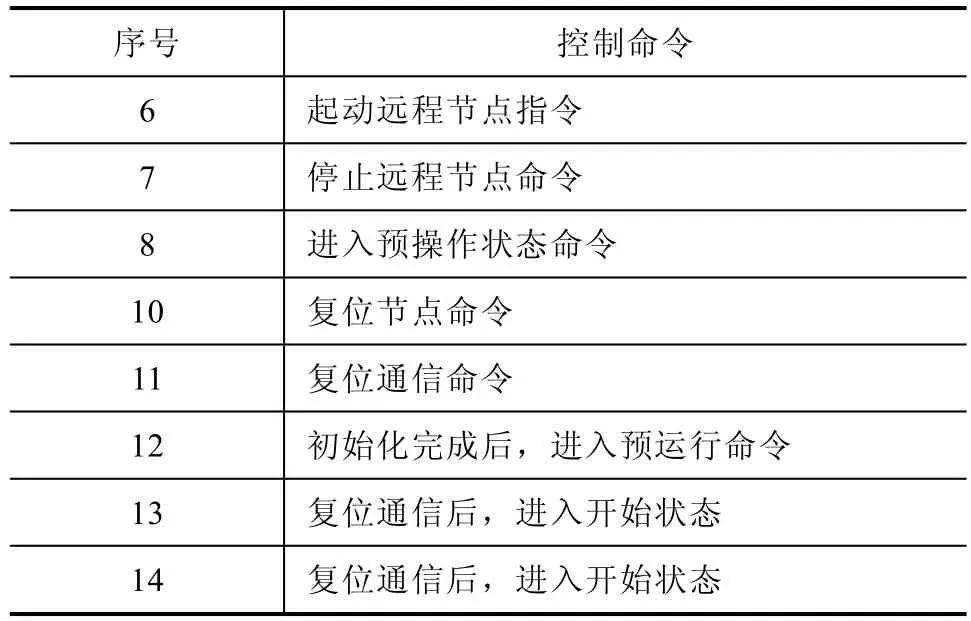
表2 觸發命令含義
初始化時主要是初始通信對象的參數。初始化結束后,設備開始進入預運行狀態。在預運行狀態時過程對象(PDO)不能進行通信,此時由過服務數據對象(SDO)進行參數配置。參數配置完成后設備進入運行狀態。在運行狀態所有對象都可以進行通信,既可以通過PDO傳輸報文也可以通過SDO訪問,修改參數等。如果主節點發送停止命令后設備可以從其他狀態直接進入停止狀態,在停止狀態,通信對象等待主節點發送命令進入其他狀態[6]。
3.3實驗程序
通信程序(部分)如圖7所示。在程序中,當狀態值statues=1時,運用SDO訪問對象字典,即對適配器RCAN_01中參數組51.05~51.25進行參數配置,當statues=2,判斷是否進行預操作和檢查參數是否配置正確,如果正確,轉到操作階段。此時狀態值為3,變頻器起動運行通信協議 ABBDrives,根據ABB Drives控制電動機,對變頻器的運行狀態進行監控。
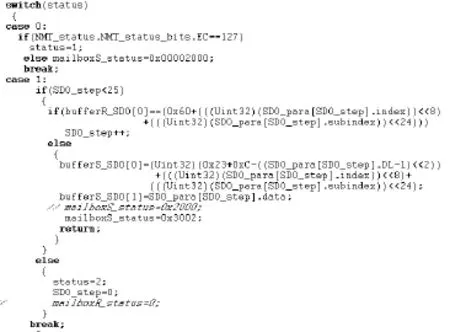
圖7 部分通信程序
3.4實驗結果
變頻器采用閉環控制方式直接轉矩進行控制,變頻器的起動和停止通過DSP上的用戶開關控制。電動機的實際參數反饋值如圖8所示。界面顯示的速度值為 675r/min,轉矩為額定轉矩的 5.97%,額定轉矩經計算為9.5N·m,則實際轉矩為0.57N·m。電流值為1.92A,功率為額定功率的2.88%,額定功率為1.5kW,則實際功率為0.0432kW。

圖8 變頻器界面
主節點運用CCS軟件的Watchwindow窗口作為監控界面,如圖9所示。狀態值為3表明變頻器已進入ABB Drives通信協議的運行階段。上位機的速度顯示值和給定值均為標幺值,速度給定值為9000,實際速度比例為 20000,電動機的額定轉速為1500r/min,則電動機的實際轉速為

即實際轉速為 675r/min。轉矩和功率的顯示值為593和27,由比例關系可換算出實際值為額定轉矩的5.93%和額定功率的2.7%。換算值與變頻器的顯示值在允許的誤差范圍內,說明通信結果正確。
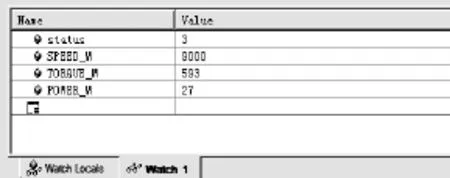
圖9 Watchwindow界面
4 結論
本文運用變頻器 RCAN-01適配器和 DSP的CAN口完成硬件連接。應用CAN通信的應用層協議CANopen完成主節點(DSP)和從節點(變頻器)的CAN通信,從而實現對電動機和變頻器運行狀態的監控。通過開發平臺CCS對CANopen的研發和編寫,可以完成一些動模實驗和工業現場中不同的實時性需求,為系統的二次開發和變頻器高性能的應用提供條件。
[1] 寧改娣,曾翔君,駱一萍. DSP控制器原理及應用[M]. 2版. 北京︰科學出版社,2009︰1-8.
[2] ABB適配器RCAN-01用戶手冊.
[3] 樊后世,尹麗娜,王為曉,等. 采煤機牽引變頻器CAN 適配器參數設置[J]. 工礦自動化,2011(12)︰101-103.
[4] 張厚林. CANopen通信協議與實現[D]. 武漢︰華中科技大學,2009︰7-14.
[5] 肖海峰,楊柳. 基于TMS320F28335的CANopen協議從節點設計與實現[J]. 科技視界,2014(36)︰79,135.
[6] 賈運紅. 基于 CANopen的變頻器控制方法研究[J].煤礦機械,2015,36(3)︰253-255.
Communication and Implementation of DSP and ABB Drive based on CANopen Protocol
Wang Xiulian1Liu Zhaoming1Bi Daqiang2
(1. Shengyang Ligong University,Shengyang110168;2. Tsinghua University,Dept of Electrical Engineering,State Key Lab of Power Systems,Beijing100084)
In view of CAN Bus with the low cost,long distance and fast rate of data transmission,this paper takes Digital Signal Processor (DSP) as the main station,and the converter is the Slave station,realizes the remote control of inverter by utilizing CAN application layer protocol CANopen. Communication is completed by debugging on CCS development platform between DSP and ABB driver. This paper also introduces parameter configuration,implication of communication parameters and communication program of RCAN-01 in ABB driver. Users can send control commands,or get the values of real time parameter from DSP to ABB driver by this way,and then control and monitor the field state. The implementation of CAN communication has strong operability and practicability for the field bus control.
CAN Bus; ABB driver; DSP; field bus
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
防爆電機(2020年3期)2020-11-06 09:07:42
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
中國艦船研究(2014年5期)2014-05-14 06:43:09
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
