基于雙2D激光位移傳感器的空間運動物體位置探測
2016-10-14 06:44:32玄柳何慶徐華于存貴
電子設計工程 2016年12期
玄柳,何慶,徐華,于存貴
(1.南京理工大學江蘇南京210094;2.上海宇航系統工程研究所上海201108)
基于雙2D激光位移傳感器的空間運動物體位置探測
玄柳1,何慶2,徐華2,于存貴1
(1.南京理工大學江蘇南京210094;2.上海宇航系統工程研究所上海201108)
要獲得空間運動物體的位置,需要實時探測被測物體特征點在空間中的三維坐標信息,為了解決這一問題,提出了基于雙2D激光位移傳感器的空間運動物體探測系統。首先,對2D激光位移傳感器進行了簡單的介紹,包括2D激光位移傳感器的工作原理及傳感器的選型;其次,詳細介紹了雙2D激光位移傳感器三維定位方案,包括方案的選擇及方案的實現原理;最后,通過被測物體橫、縱坐標探測模擬實驗,以及軸、縱坐標探測模擬實驗兩個實驗,驗證了方案的可行性。實驗證明基于雙2D激光位移傳感器的空間運動物體位置信息探測系統不會受被測物體的圓弧面的影響,且探測精度高、無需通過復雜的信息處理,采樣頻率最高可達10K,有利于提高信號探測的實時性。
信號探測;2D激光位移傳感器;凸起標志;實時性
當物體在空間中運動時,要實時探測被測物體在空間中的三維坐標信息,目前方法有很多,比如利用攝像機通過對圖像處理進行特征點的定位[1]。但是,若使用兩個攝像頭組成雙目立體視覺探測系統,就必須要對兩個攝像頭都進行標定,增加了系統的復雜度,影響結果的準確性[2]。如果使用單目視覺進行信號探測,則會增加圖像處理算法的復雜性,延長處理時間。同時使用機器視覺要進行大量的圖像處理,使得系統的采樣頻率降低,影響探測的實時性。另外,由于被測物體為不規則形狀,當物體表面為弧面時易對攝像頭視覺定位造成干擾,產生較大的誤差[3]。
鑒于此提出了一種基于雙2D激光位移傳感器的空間運動物體位置探測方法,不需要進行復雜的信息處理,不受物體形狀影響,定位精度高,實時性好。2D激光位移傳感器可以測量金屬、陶瓷、木材、塑料等材料的表面,具有測量范圍寬、測量精度高、抗干擾性強等特點。
1 探測系統設計
1.12D激光位移傳感器工作原理
2D激光位移傳感器可以用來測量被測物體表面任一點的二維坐標信息,由激光發生器、透鏡、鏡片、二維數組器、信號處理器、外殼等組成,其工作原理
基于光學三角測量法[4],工作原理示意如圖1所示。
2D激光位移傳感器工作原理:半導體激光發生器作為光源,其發射出的激光通過透鏡后形成激光扇面,激光扇面與被測物體相交形成輪廓線,被測物體將激光反射到鏡片上,鏡片將所收集的反射光投影到二維數組器上,信號處理器通過分析處理二維數組器上的圖形信號就可獲得被測物體輪廓線上任一點的縱向深度信息以及距激光扇面中心線的橫向信息[5]。
2D激光位移傳感器所發射出的激光扇面與被測物體相交產生一條交線,該激光交線由若干激光數據點組成[6]。2D激光位移傳感器可測出被測物體在激光交線上的任一特征點到傳感器的縱向距離y,以及到視場中心線的橫向距離x。通過一個2D激光位移傳感器可以獲得被測物體上特征點的二維坐標,那么利用兩個2D激光位移傳感器就可以獲得特征點的三維坐標[7]。
1.2系統方案設計
在被測物體上放置水平、豎直兩個凸起標志,通過兩個2D激光位移傳感器檢測兩個凸起標志的二維信息(橫向與縱向、軸向與縱向)就可以實現物體在空間坐標系中的三維定位。基于雙2D激光位移傳感器的運動物體空間位置探測系統的主要構成如圖2所示。
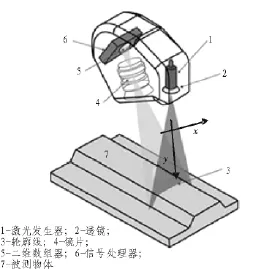
圖1 2D激光位移傳感器工作原理示意圖
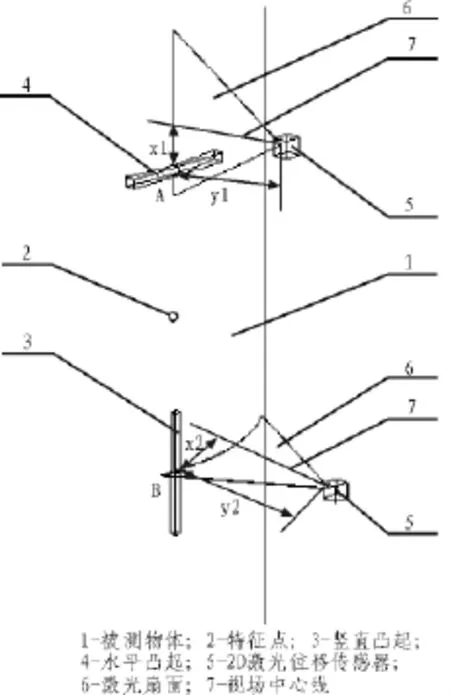
圖2 探測系統構成示意圖
要探測的特征點位于被測物體的表面上,在被測物體的表面有兩個凸起標志,其中一個凸起標志呈豎直方向,為豎直凸起標志,另一個凸起標志呈水平方向,為水平凸起標志,兩凸起標志相互垂直,且豎直凸起標志的延長線穿過特征點。在兩凸起標志相對應的位置分別設置有兩個位置固定的2D激光位移傳感器。
初始狀態下,兩2D激光位移傳感器的激光扇面垂直于相應的凸起標志,視場中心線穿過相應的凸起標志。兩2D激光位移傳感器與相應的凸起標志的安裝距離為d,且兩2D激光位移傳感器的連線平行于豎直凸起標志。
被測物體沿3個方向平動,其運動范圍在2D激光位移傳感器的探測范圍內,并保證被測物體在運動過程中,兩凸起標志與相應的2D激光位移傳感器的激光扇面存在交點[8-9]。
在被測物體的運動過程中,水平凸起標志與相對應的2D激光位移傳感器的激光扇面交點為A,A到視場中心線的距離為x1(軸向),A到2D激光位移傳感器的距離為y1(縱向);豎直凸起標志與相對應的2D激光位移傳感器的激光扇面交點為B,B到視場中心線的距離為x2(橫向),B到2D激光位移傳感器的距離為y2(縱向)。
設初始狀態下,被測物體的特征點的空間坐標為(0,0,0),則被測物體在運動過程中,其特征點的空間坐標為(x1,(y1+y2)/2-d,x2)。這樣通過兩個2D激光位移傳感器即可獲得空間運動物體的位置信息。
2 實驗及分析
本實驗所用信號探測系統的傳感器為上海思信科學儀器公司的2D激光位移傳感器,其型號為GOCATOR 2350,其實物如圖3所示。
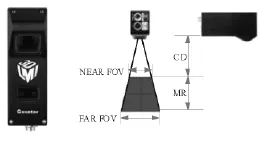
圖3 2D激光位移傳感器實物圖
2D激光位移傳感器參數如表1所示。
2D激光位移傳感器的MR為沿y方向的測量范圍,FOV為沿x方向的測量范圍,CD為安裝凈距離。2D激光位移傳感器與被測物體之間的安裝距離要考慮CD的影響[10]。
2.1實驗環境
在雙2D激光位移傳感器三維定位實驗中,2D激光位移傳感器實時探測被測物體兩個凸起標志在傳感器坐標系中的二維坐標信息,然后將探測到的坐標信息反饋給上位機,通過上位機軟件實時顯示被測物體凸起標志的二維坐標信息。實驗過程中所使用的實驗器材包括被測物體、2D激光位移傳感器、同步觸發器、上位機及軟件[11]。
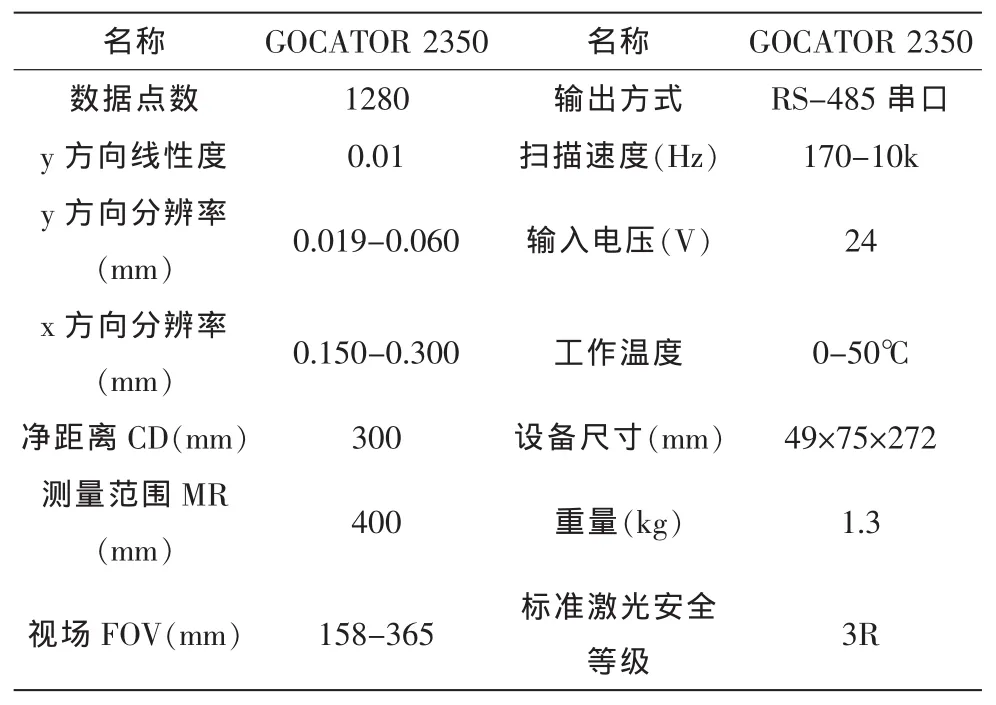
表1 2D激光位移傳感器參數表
本實驗中將被測物體定為一平面靶板,在該靶板上放置兩個凸起標志,兩個凸起標志方向分別呈水平方向、豎直方向,水平凸起標志長為260 mm、豎直凸起標志長為150 mm,凸起標志寬3 mm、高3 mm,凸起標志選用反光性強的材料,被測物體如圖4所示,通過推動被測物體沿三個軸向的運動模擬空間物體的運動。在實驗過程中,必須保證凸起一直在2D激光位移傳感器的測量范圍內。
實驗過程中,2D激光位移傳感器激光線與被測物體凸起標志始終相交于一點,由2D激光位移傳感器測得此凸起點在傳感器坐標系中的二維坐標信息。

圖4 被測物體模擬圖
由于通過兩2D激光位移傳感器分別獲取的兩凸起標志二維坐標信息解算得到運動物體在空間坐標系中的三維坐標信息,因此,必須保證兩個2D激光位移傳感器在同一時刻的信息同步[12]。鑒于此,使用同步觸發器來使兩個2D激光位移傳感器同時觸發,從而保證所探測的兩凸起標志的坐標信息同步。同步觸發器[13]的實物如圖5所示。
2D激光位移傳感器所獲得的坐標信息在上位機軟件界面里呈現,如圖6所示,圖中曲線凸起點為2D激光位移傳感器激光線與被測物體凸起標志交點,其橫坐標為2D激光位移傳感器激光線與被測物體凸起標志交點到2D激光位移傳感器視場中心線的距離,其縱坐標為2D激光位移傳感器激光線與被測物體凸起標志交點到2D激光位移傳感器的距離[14]。本實驗初始狀態下,2D激光位移傳感器與被測物體之間的安裝距離為500 mm,被測物體上兩凸起標志均在2D激光位移傳感器視場中心線上,通過配置上位機軟件,將縱坐標值減去500 mm后進行二維曲線顯示,此時,曲線凸起點在傳感器坐標系原點處。隨著被測物體的運動,曲線凸起點在傳感器坐標系中作相應變化。

圖5 同步觸發器實物圖
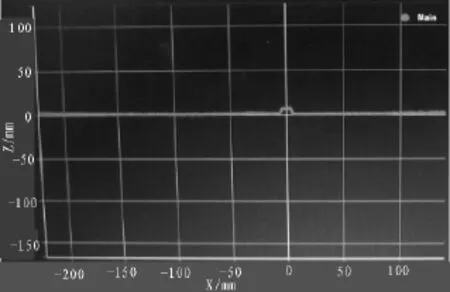
圖6 上位機軟件界面圖
2.2實驗內容
1)被測物體橫、縱坐標探測模擬實驗(左右、前后方向)
通過2D激光位移傳感器探測豎直凸起標志可以定位被測物體在空間坐標系中的橫、縱坐標[15],其探測模擬實驗如圖7所示。
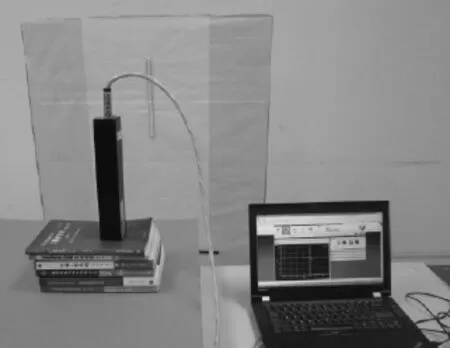
圖7 被測物體橫、縱坐標探測模擬實驗圖
曲線凸起點橫坐標值為被測物體在空間坐標系中的橫坐標值,曲線凸起點縱坐標值為被測物體在空間坐標系中的縱坐標值。初始狀態下,曲線凸起點在坐標系的原點處,代表被測物體特征點在空間坐標系中橫向、縱向的位移量均為零;當推動被測物體沿橫向運動時,曲線凸起點橫坐標會產生相應變化,而縱坐標不變;當推動被測物體沿縱向運動時,曲線凸起點縱坐標會產生相應變化,而橫坐標不變;當推動被測物體軸向運動時,曲線凸起點橫、縱坐標均不變。
2)被測物體軸、縱坐標探測模擬實驗(上下、前后方向)
通過2D激光位移傳感器探測被測物體水平凸起標志可以定位被測物體在空間坐標系中的軸、縱坐標,其探測模擬實驗如圖8所示。

圖8 被測物體軸、縱坐標探測模擬實驗圖
曲線凸起點橫坐標值為被測物體在空間坐標系中的軸坐標值,曲線凸起點縱坐標值為被測物體在空間坐標系中的縱坐標值。初始狀態下,曲線凸起點在坐標系的原點處,代表被測物體在空間坐標系中軸向、縱向的位移量均為零;當推動被測物體沿軸向運動時,曲線凸起點橫坐標會產生相應變化,而縱坐標不變;當推動被測物體沿縱向運動時,曲線凸起點縱坐標會產生相應變化,而橫坐標不變;當推動被測物體沿橫向運動時,曲線凸起點軸、縱坐標均不變。
2.3實驗結果
被測物體橫、縱坐標探測模擬實驗和軸、縱坐標探測模擬實驗兩個實驗驗證了雙2D激光位移傳感器三維定位方案的可行性。同時驗證了被測物體分別沿橫向(左右)、縱向(前后)、軸向(上下)單獨運動時,2D激光位移傳感器探測的其余兩個方向的坐標無變化,即物體沿一個方向運動時對其余兩個方向坐標的探測無影響,證明了該方案的準確性。
3 結論
針對空間運動物體位置探測問題,本文提出了基于雙2D激光位移傳感器的空間運動物體位置探測方案。該方案通過兩個2D激光位移傳感器獲得被測物體上特征點的三維坐標,檢測精度高,采樣頻率快,且避免了復雜的圖像處理和分析運算,有利于提高跟蹤的實時性。
[1]胡壽松.自動控制原理[M].北京:科學出版社,2001.
[2]齊賢偉.運載火箭自動對接脫落連接器隨動技術研究[D].南京:南京理工大學,2014.
[3]彭剛,黃心漢,王敏,等.基于視覺引導和超聲測距的運動目標跟蹤和抓取[J].高技術通訊,2002(6):74-78.
[4]李蘭君,喻壽益.單點激光三角法測距及其標定[J].研究與開發,2003(10):49-51.
[5]林向東.激光二維傳感器測量直線度方法的研究[D].北京:北京交通大學,2011.
[6]劉薇娜,謝國紅.基于CCD的激光三角位移法測液位的性能研究[J].自動化儀表,2010(7):19-21.
[7]孫興.DSP在機器人視覺系統的應用與研究[D].貴陽:貴州大學,2006.
[8]曲興華.基于激光測距的大尺寸測量應用研究[J].儀器儀表學報,2009(3):482-485.
[9]張海峰.單向激光測距及其測量實驗[J].中國激光,2013(3):1-7.
[10]Shanghai Sixin Scientific Instruments Co.,Ltd[M].Laser Displacement Sensor.2012
[11]于存貴,玄柳.運動物體空間坐標信息探測方法.中國,201510063280.5[P],2015
[12]程鵬飛.大動態范圍高精度激光測距關鍵技術研究[D].上海:中國科學院上海技術物理研究所,2014.
[13]Alan Littlefield.Umbilical Design[J].Produced by the NASA Center for Aerospace Information(CASI),2007.
[14]郭鴻祥.準直測量中風擺跟蹤技術的研究[D].陜西:中國科學院西安光學精密機械研究所,2013.
[15]李宗濤.自動對接連接器探測跟蹤技術研究[D].南京:南京理工大學,2015.
Position detection of spatial motion objects based on double 2D laser displacement sensor
XUAN Liu1,HE Qing2,XU Hua2,YU Cun-gui1
(1.Nanjing University of Science and Technology,Nanjing 210094,China;2.Shanghai Institute of Astronautical Systems Engineering,Shanghai 201108,China)
To gain the position of spatial motion objects,it is needed to detect the three-dimensional coordinate of measured object feature points constantly.So there is a spatial motion objects detected system based on double 2D laser displacement sensor.First of all,there is an introduction about double 2D laser displacement sensor,including double 2D laser displacement sensor's principle and sensor type.Secondly,introducing the project based on double 2D laser displacement sensor and axial and vertical coordinates detection simulate experiments to prove the project is available.Experiments prove that the spatial motion objects detected system based on double 2D laser displacement sensor is not influenced by measured object's cambered surface.It has high detection precision and doesn't deal with flexible informations.The sample frequency is 10k highly.All these are better to raise signal detection's instantaneity.
signal detection;2D laser displacement sensor;salient sign;instantaneity
TN91
A
1674-6236(2016)12-0060-04
2016-01-05稿件編號:201601023
上海航天科技創新基金(SAST201410)
玄柳(1990—),女,山東泰安人,碩士研究生。研究方向:智能探測與控制技術。
