整地筑埂兩用機傳動系統的設計
2016-10-19 14:09:15趙麗萍何新如楊丹
湖北農業科學 2016年8期
關鍵詞:設計
趙麗萍 何新如 楊丹

摘要:為了提高水稻種植機械化的程度,針對其生產過程中的整地筑埂作業工序,設計了一種稻田生產用整地筑埂兩用機的傳動系統,該傳動系統主要由變速箱、傳動軸、鏈傳動系統、兩個旋耕集土器半軸、離合器、軸承等關鍵部件組成;采用輪式拖拉機為動力,實現了一次進地,可同時完成整地和筑埂兩種作業。田間試驗表明,該傳動系統設計合理、性能穩定、技術先進,為水稻生產過程全程機械化提供了技術支持。
關鍵詞:整地筑埂;兩用機;傳動系統;設計
中圖分類號:S222.4 文獻標識碼:A 文章編號:0439-8114(2016)08-2105-03
DOI:10.14088/j.cnki.issn0439-8114.2016.08.048
Abstract:In order to improve the degree of mechanization of rice cultivation process, a drive system on a kind of rotating and building ridge dual-purpose machine was designed. The drive system mainly consists of the transmission, drive shaft, chain transmission parts, clutch and other components. The wheeled tractors was used, and land rotary tillage and ridging were completed at the same time. Field tests showed that the drive system was designed reasonably, and its function was stable,its technology was advanced, the support were provided to full mechanization in paddy field.
Key words: rotating and building ridge;dual-purpose machine;drive system;design
水稻是人們賴以生存的主要糧食作物,其在糧食安全生產中占有非常重要的地位。在水稻生產過程中,插秧前需要進行水田灌溉,將田地劃為田字形的方格,在方格周圍修筑土埂,所筑土埂能夠擋水,使之浸潤土壤。筑埂是實現水田灌溉的關鍵,堅實合理的田埂不僅能滿足水稻對水分的需求[1],還可節約水資源。水田筑埂屬于水稻機械化生產過程中的整地環節。長期以來,水田筑埂都依靠人力完成,人工筑埂是一項既繁重又費工的勞動,即使借助一些專用工具,勞動強度依然很大,工作效率很低,成本卻很高,田埂的一致性和均勻性差,且需要人工輔助壓實,已不適合中國大面積平原地區種植水稻的耕作模式,更不利于推進水田生產機械化的發展。因此,及時而優質地修筑效果滿意的土埂是水稻生產的基本條件之一,修筑田埂最好的方法就是采用機器筑埂。水田筑埂機械化是實現水田生產機械化生產必不可少的重要環節,實現筑埂機械化已迫在眉睫[2-5]。
文獻表明,國內外對水田筑埂機有一定的研究[6-15]。但一般的筑埂機只有筑埂功能,沒有整地功能,且工作效率較低。因此,有必要研制一種稻田生產用整地筑埂兩用機,能夠在旋耕土壤的同時筑出一條土埂,以實現用一種機型解決旋耕、筑埂兩種機型的通用問題,既能有效解決人工筑埂存在的許多問題,以滿足水稻生產過程中節本增效的實際需要,實現了整地和筑埂作業全程機械化,又能減輕稻農購買機具的投資成本,方便機具的使用與維修,提高其利用率。新型整地筑埂兩用機是由吉林省科學技術廳資助、吉林農業大學承擔的重點科研項目。該機器技術關鍵是既要體現水稻生產過程中水田農藝技術的先進性,還要保證旋耕、筑埂的通用性,因此為其設計一套安全可行的整地、筑埂傳動系統至關重要。
1 傳動系統方案的確定及計算
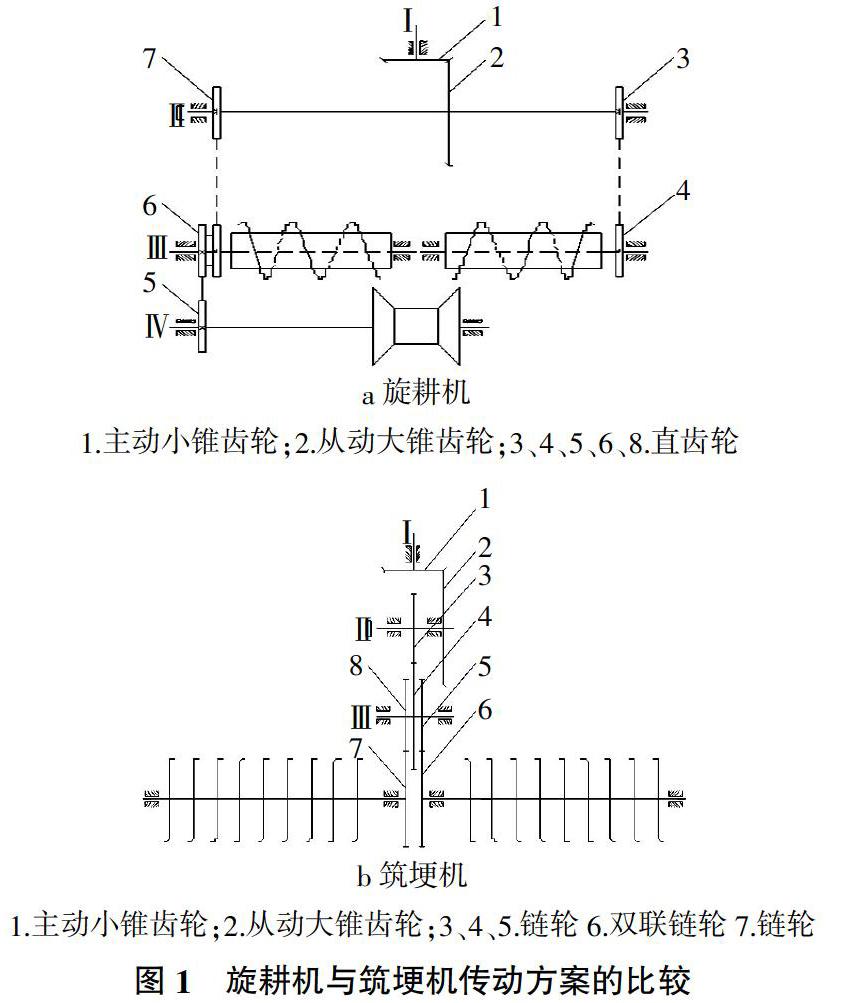
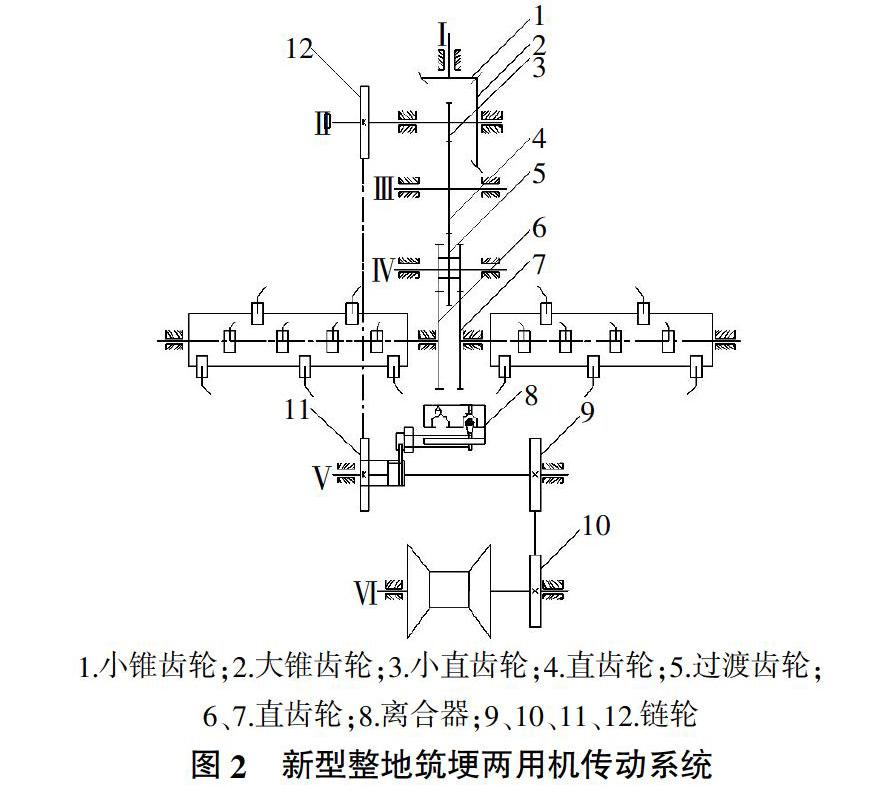
單一功能的旋耕機與筑埂機傳動方案如圖1所示。由圖1a可見,旋耕機的動力輸入軸Ⅰ的動力經過1對錐齒輪和三級直齒輪傳動,傳遞到2個旋耕刀半軸上,帶動旋耕刀旋轉,從而達到切碎土壤的目的。由圖1b可見,筑埂機的動力輸入軸Ⅰ的動力經過1對錐齒輪和鏈輪傳動,一方面通過兩側鏈傳動將動力傳遞2個螺旋集土器的半軸上,帶動其旋轉,使其在前進的過程中將土壤在中間聚集成一條土埂;另一方面,動力通過雙聯鏈輪,也將動力傳遞到筑埂輥,從而將前面形成的土壤到壓實成型。旋耕機傳動方案中,在旋耕時齒輪箱下有漏耕存在,筑埂機傳動方案中,由于雙邊采用鏈傳動,傳動軸Ⅱ過長,工作可靠性較差。本研究結合以上兩種機器傳動系統的優點,設計了一種新型整地筑埂兩用機的傳動系統,其結構如圖2所示。由圖2可見,該傳動系統主要由變速箱、傳動軸、鏈傳動系統、2個旋耕集土器半軸、離合器8、軸承等關鍵部件組成。
1.1 動力傳遞方式
由圖2可見,工作時拖拉機輸出的動力通過萬向節傳遞給變速箱的動力輸入軸Ⅰ,通過動力輸入軸Ⅰ上的1對錐齒輪的嚙合,帶動軸Ⅱ旋轉。軸Ⅱ上的動力一方面通過4級直齒輪傳動將動力傳遞到軸Ⅲ、軸Ⅳ,由軸Ⅳ上的三聯齒輪帶動齒輪旋轉,從而實現2個半螺旋型旋耕集土器的刀軸旋轉,完成整地作業;另一方面,軸Ⅱ上的動力通過安裝在其上的鏈輪,將傳遞到軸Ⅴ上,從而帶動筑埂裝置上的推壓成型輥旋轉,將土壤最終壓實成型。
1.2 旋耕集土器的設計
在左、右對稱的刀軸上分別設計有呈螺旋形排列的整地集土刀片,并使左半軸刀軸上的刀片采用右旋排列,右半軸刀軸上的刀片采用左旋排列,結果使刀片在旋切土壤的時候,既可以由上向下切削土壤,使之破碎,又能使部分土壤向中間聚集,為筑埂的土源聚集奠定基礎。因此,應將刀片的刀身設計得較寬闊,刃口部位微彎,形狀則如風扇葉形或螺旋漿葉形[16,17],如圖3所示。刀軸材料選40 Cr,刀座材料則采用16 Mn鋼板制造,焊接在刀軸上,刀片采用65 Mn高碳鋼板沖壓成型,熱處理硬度要求HRC50左右。
1.3 傳動比的計算
該機配套動力為58~81 kW以上輪式拖拉機。考慮該機工作幅寬為2.3 m,工作負荷較大,筑埂時拖拉機行走速度較小時效果較好,故選擇拖拉機動力輸出軸轉速為540 r/min。
1.3.1 旋耕狀態 旋耕部件減速器的齒輪傳動為四級齒輪傳動,一級傳動為1對錐齒輪,輸入的轉速540 r/min,輸入小錐齒輪齒數z1=13,輸出大錐齒輪齒數z2=28,傳動比i1x=z2/z1=2.15,二級為直齒圓柱齒輪傳動,輸入齒輪齒數z3=13,輸出齒輪齒數z4=33,傳動比i2x=2.54,三級為直齒圓柱齒輪傳動,輸入齒輪齒數33,輸出齒數30,傳動i3x=0.91,四級直齒圓柱齒輪傳動,輸入齒數為30,輸出齒數為16,故傳動比i4x=0.53,則總傳動比ix為:ix=i1x·i2x·i3x·i4x=2.63。
1.3.2 筑埂狀態 由拖拉機輸出的動力,通過變速箱傳遞到軸Ⅱ,再經三級鏈傳動,最終驅動推壓成型輥,將土埂成型打實。鏈傳動為三級,一級傳動比i1z=1,二級傳動比i2z=1,一、二級鏈輪齒數均為17齒,三級鏈傳動輸入鏈輪齒數是17齒,輸出鏈輪齒數是15齒,故其傳動比i3z=0.88。由于本機器傳動動力較大,為保證動力傳動的安全性和平穩性,選用型號是20A的雙排滾子鏈。計算得旋耕刀軸和推壓成型輥轉速分別為209 r/min和285 r/min,滿足了旋耕和筑埂的農藝要求。
1.4 離合器的設計
該兩用機傳動系統中的軸Ⅴ上設計安裝牙嵌式離合器,如圖4所示。如果只進行整地作業,將撥叉限位塊上的操作手柄移動到最右側限位處,此時操作手柄帶動撥叉將牙嵌式滑移齒輪沿著花鍵軸向右移動,與鏈輪齒分離,花鍵軸停止轉動,無動力輸出。這時,采用拖拉機為動力用液壓油缸將集土器和筑埂裝置以軸Ⅴ為旋轉軸,向上旋起。該兩用機可只進行整地作業;如果同時進行整地和筑埂作業,則將圖4中的撥叉限位塊上的操作手柄移動到最左側限位處,此時操作手柄帶動撥叉將滑移齒輪沿著花鍵軸向左移動,與鏈輪齒嚙合,花鍵軸轉動,動力經鏈輪輸出傳遞到推壓成型輥,使其旋轉,拖拉機在前進的過程中,同時完成整地和筑埂作業。可見,離合器的安裝,可以實現該機在旋耕作業中推壓成型輥的靜止與整地筑埂過程中推壓成型輥的轉動之間的切換,即通過撥叉,使滑移齒輪與鏈輪齒的嚙合與分離,從而實現推壓成型輥的動、靜切換,從而真正實現可調節式的一機兩用。
2 傳動系統的技術關鍵
1)通過操縱撥叉,可以實現筑埂推壓成型輥的動、靜切換,從而實現了同一臺機器能夠一機兩用,同時完成整地、筑埂兩種作業工藝。
2)無需進行筑埂作業時,可通過離合器使花鍵軸停止轉動,筑埂部件可以通過液壓缸使之升起,此時機器可以只進行旋耕作業,提高了機器的利用率。
3)旋耕刀軸分左、右2個半軸,減小了單軸轉動的扭矩,提高了作業的平穩性和可靠性。
3 小結
田間試驗表明,該兩用機的傳動系統設計比較合理、技術先進、性能穩定可靠,有效地實現了整地和筑埂聯合,各項性能指標均達到了預期目標,為水稻生產過程全程機械化提供了技術支持和有利保障。
參考文獻:
[1] 王金峰,王金武,孔彥軍,等.懸掛式水田筑埂機及其關鍵部件研制與試驗[J].農業工程學報,2013,29(6):28-34.
[2] 韓休海,于 磊,邢占強.黑龍江省水田耕整地機械化技術研究[J].農業科技與裝備,2013,232(10):40-41,44.
[3] 丁善剛.水稻機械化生產的現狀與思考[J].現代農業科學,2009,16(5):263-264.
[4] 周亮經.淺談水稻機械化生產存在的問題及解決對策[J].中國農業信息,2011(1):37-38.
[5] 張文毅,袁釗和,吳崇友,等.水稻種植機械化進程分析研究[J].中國農機化,2011(1):19-22.
[6] 車 剛,張 偉,萬 霖,等.基于滅茬圓盤驅動旋耕刀多功能耕整機設計與試驗[J].農業工程學報,2012,28(20):34-40.
[7] MALLEY D F, MCCLURE C, MARTIN P D. Compositional analysis of cattlemanure during composting using a field portable near infrared spectrometer[J]. Communications in Soil Science and Plant Analysis,2005,36(4):455-476.
[8] 杜巧連,熊熙程,魏建華.拖拉機液壓懸掛耕深電液控制系統設計與試驗[J].農業機械學報,2008,39(8):62-65.
[9] 周建來,李源知,焦巧鳳.國內外旋耕機的技術狀況[J].農機化研究,2000,22(2):49-51.
[10] 丁為民,王耀華,彭嵩植.正、反轉旋耕不同耕作性能的比較[J].南京農業大學學報,2003(3):105-109.
[11] 辛海江.淺談稻田筑埂機[J].現代化農業,2012(1):29.
[12] 韓振生.水田筑埂裝置結構與受力分析[J].農機化研究,2013, 35(6):45-47.
[13] 關振君.DTZG-01型稻田筑埂機的設計研究[J].農業科技與裝備,2011(10):20-22.
[14] 劉百合.系列水田筑埂機介紹[J].農業機械,2011(1):76.
[15] 閆懷峰.條畦灌溉筑埂機的改制[J].新疆農機化,2010(2):13.
[16] 鮑秉啟,安龍哲,胡文英.我國和日本等國水田機械發展概況[J].農機化研究,2002,24(3):23-25.
[17] 梁 政,旋耕機改進為旋耕起壟機的設計及制造[J].現代農業裝備,2008(5):48.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
