慣性導(dǎo)航位移參數(shù)在大地坐標(biāo)系中的嚴(yán)密計(jì)算方法
2016-10-21 16:12:52宋韜梁海軍
電子技術(shù)與軟件工程 2016年9期
宋韜 梁海軍
【關(guān)鍵詞】GNSS/INS 組合導(dǎo)航 大地坐標(biāo)系統(tǒng) 參考橢球 導(dǎo)航位移參數(shù) 嚴(yán)密算法
1 引言
為指引航空器按照預(yù)定航線以正確的飛行姿態(tài)抵達(dá)目的地,需要采用導(dǎo)航系統(tǒng)對(duì)其進(jìn)行定位和航跡引導(dǎo)。而運(yùn)用于航空器領(lǐng)域的導(dǎo)航系統(tǒng)必須適應(yīng)遠(yuǎn)距離航行及高速移動(dòng)的特殊要求。
目前,民用航空領(lǐng)域多采用基于甚高頻全向信標(biāo)和測(cè)距儀(VOR/DME)的陸基導(dǎo)航設(shè)備進(jìn)行導(dǎo)航。陸基導(dǎo)航設(shè)備不能準(zhǔn)確測(cè)量目標(biāo)相對(duì)于導(dǎo)航臺(tái)的俯仰角,未將地球曲率對(duì)距離和航空器導(dǎo)航精度和空域資源的有效利用均受到陸基導(dǎo)航系統(tǒng)的限制。
具有全球性、高精度和全天候等特點(diǎn)的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)和不依賴外界信息且受外界環(huán)境影響而降低精度,且在測(cè)量高速移動(dòng)的目標(biāo)時(shí)容易失鎖,從而影響導(dǎo)航的穩(wěn)定性和連貫性;而 INS 為一種以牛頓運(yùn)動(dòng)定律為基礎(chǔ),不接收外界信息,不向外輻射能量且不依靠外部參考基準(zhǔn)的自主式導(dǎo)航系統(tǒng)。該導(dǎo)航系統(tǒng)通過(guò)各正交軸向的加速度傳感器進(jìn)行自主定位。INS 幾乎不受自身運(yùn)行狀態(tài)和外界環(huán)境的干擾,但缺少外部參考基準(zhǔn)的特點(diǎn),使其定位航要求。
上述兩種導(dǎo)航系統(tǒng)在導(dǎo)航方式和適用范圍上互相補(bǔ)充。因此,可以綜合利用兩種導(dǎo)航系統(tǒng),將其導(dǎo)航數(shù)據(jù)進(jìn)行融合,構(gòu)成 GNSS/INS 組合導(dǎo)航系統(tǒng),從而使 GNSS 導(dǎo)航電文易受干擾、易失鎖及 INS 導(dǎo)航精度隨著時(shí)間的推移而降低的問(wèn)題得到解決。
對(duì)兩種導(dǎo)航系統(tǒng)基于不同坐標(biāo)基準(zhǔn)的導(dǎo)航參數(shù)進(jìn)行精確數(shù)據(jù)融合是實(shí)現(xiàn)組合導(dǎo)航的關(guān)鍵問(wèn)題之一。即將 INS 測(cè)得的在三個(gè)正交軸上的位移參數(shù)換算到 GNSS 所在大地坐標(biāo)系參考橢球的大地經(jīng)度、大地緯度和大地高上。從而使慣導(dǎo)系統(tǒng)的位移參數(shù)與大地坐標(biāo)建立聯(lián)系,為之后的濾波分析和位置解算提供準(zhǔn)確可靠的基礎(chǔ)數(shù)據(jù)。
2 慣導(dǎo)位移參數(shù)在近似正球體中的概略計(jì)算
2.1 衛(wèi)星導(dǎo)航系統(tǒng)與慣導(dǎo)系統(tǒng)的測(cè)量基準(zhǔn)
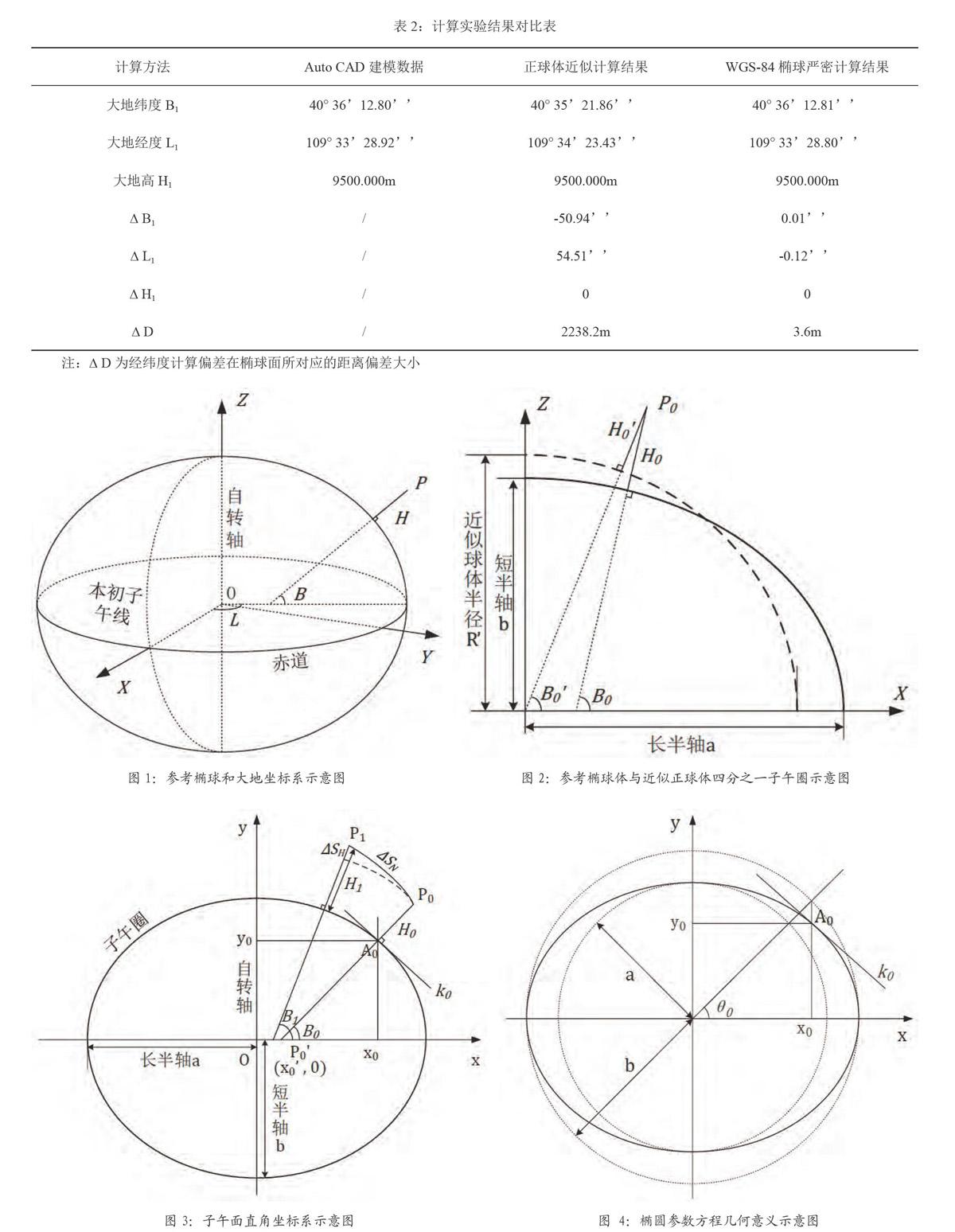
由于地球重力場(chǎng)的不均勻分布,使大地水準(zhǔn)面所包圍的形體(大地體)呈現(xiàn)為兩級(jí)略扁的不規(guī)則球體,難以用數(shù)學(xué)公式嚴(yán)密表達(dá)。因此,在衛(wèi)星導(dǎo)航中通常采用幾何中心與地球質(zhì)心重合,以地球自轉(zhuǎn)軸為旋轉(zhuǎn)軸的旋轉(zhuǎn)橢球近似代替大地體,稱(chēng)為參考橢球。而衛(wèi)星的導(dǎo)航定位是以基于參考橢球的大地坐標(biāo)系統(tǒng)為基準(zhǔn)的,即:大地經(jīng)度 L、大地緯度 B 和大地高 H(如圖 1 所示)。
而慣性導(dǎo)航系統(tǒng)根據(jù)慣性單元安裝部位和測(cè)量模式的不同,可分為平臺(tái)式與捷聯(lián)式兩種。
它們均利用三軸加速度計(jì)得到運(yùn)動(dòng)載體沿真北方向、鉛垂線方向及與兩者正交向東的第三個(gè)方向的瞬時(shí)加速度值,并利用牛頓運(yùn)動(dòng)定律換算為三軸位移參數(shù)進(jìn)行累加計(jì)算定位。
2.2 基于近似正球體的位移參數(shù)概略計(jì)算
如上文所述,衛(wèi)星導(dǎo)航系統(tǒng)與慣導(dǎo)系統(tǒng)的測(cè)量基準(zhǔn)存在較大差別,而要想實(shí)現(xiàn)兩者的數(shù)據(jù)融合進(jìn)行組合導(dǎo)航,就需要統(tǒng)一坐標(biāo)基準(zhǔn)。目前,針對(duì) GNSS/INS 組合導(dǎo)航系統(tǒng)的導(dǎo)航參數(shù)轉(zhuǎn)換,通常將參考橢球近似看作半徑恒定的正球體進(jìn)行計(jì)算。若已知初始定位點(diǎn)P0的大地坐標(biāo)為(L0,B0,H0),慣導(dǎo)系統(tǒng)所得三個(gè)正交方向的位移參數(shù)分別為?SN、?SH、?SE,則基于近似正球體的大地坐標(biāo)概略值計(jì)算式為:
在上式中,R′為參考橢球的近似球體半徑,介于赤道半徑與極半徑之間。
如圖 2,為參考橢球和近似正球體的四分之一子午圈示意圖。從圖中可知,同一點(diǎn)P0在參考橢球和近似正球體中的大地坐標(biāo)存在一定偏差。近似計(jì)算方法思路簡(jiǎn)便,算法復(fù)雜度低且易于程序?qū)崿F(xiàn),但忽略了衛(wèi)星導(dǎo)航系統(tǒng)參考橢球中赤道半徑(橢球長(zhǎng)半軸 a)與極半徑(橢球短半軸 b)之間存在約 21km 偏差的特點(diǎn),故使得概略計(jì)算結(jié)果與真實(shí)情況存在差距。在對(duì)定位精度有較高要求,或在較長(zhǎng)時(shí)間內(nèi)無(wú)法使用全球?qū)Ш叫l(wèi)星系統(tǒng)對(duì)慣導(dǎo)系統(tǒng)的定位結(jié)果進(jìn)行校正時(shí),這種近似計(jì)算方法難以得出精確可信的結(jié)果。
3 基于大地坐標(biāo)系統(tǒng)的慣導(dǎo)位移參數(shù)嚴(yán)密算法
假設(shè)在參考橢球附近有一點(diǎn)P0為已知初始定位點(diǎn),其大地坐標(biāo)為(L0,B0,H0)。在經(jīng)過(guò)時(shí)間?t后,到達(dá)P1點(diǎn)。根據(jù)慣導(dǎo)系統(tǒng)測(cè)得,由初始定位點(diǎn)P0到P1的過(guò)程中,沿真北方向、鉛垂線方向和與兩者正交向東的第三個(gè)方向的位移參數(shù)分別為:?SN、?SH、?SE,欲根據(jù)位移參數(shù)得到P1點(diǎn)相對(duì)于參考橢球的精確大地坐標(biāo)(L1,B1,H1)。
3.1 大地緯度方向位移量的計(jì)算
如圖 3 所示,為參考橢球子午面直角坐標(biāo)系示意圖。其中,子午面坐標(biāo)系xOy是以地球質(zhì)心O為原點(diǎn),地球自轉(zhuǎn)軸為y軸,x軸位于初始定位點(diǎn)P0所在子午面的平面直角笛卡爾坐標(biāo)系。圖中橢圓代表經(jīng)過(guò)P0點(diǎn)的子午圈。
由已知條件,在子午面直角坐標(biāo)系中,從P0到P1,物體沿著與子午圈平行的路徑向真北方向的位移量為?SN(如圖 3),則未知點(diǎn)P1的大地緯度計(jì)算方法推導(dǎo)如下:
設(shè)初始定位點(diǎn)P0沿參考橢球法線方向與橢球面的交點(diǎn)為A0,它在子午面直角坐標(biāo)系中的坐標(biāo)為(x0,x0)。根據(jù)橢圓參數(shù)方程(如圖 3 所示),該點(diǎn)坐標(biāo)值表示如下:
(1)
上式中,a、b分別為參考橢球參數(shù)中的長(zhǎng)半軸與短半軸,θ0為角度參數(shù),其幾何意義如圖 4 所示。
過(guò)點(diǎn)A0作子午圈的切線,該切線斜率K0和該點(diǎn)處法線斜率(點(diǎn)P0緯度正切值)tan B0計(jì)算分別如下所式所示:
通過(guò)(3)式即可得A0點(diǎn)大地緯度B0和對(duì)應(yīng)的子午圈橢圓參數(shù)方程中的角度參數(shù)θ0之間的關(guān)系:
根據(jù)(1)式與(4)式可得P0在參考橢球面的投影點(diǎn)A0在子午面平面直角坐標(biāo)系的坐標(biāo)(x0,y0)。
從而根據(jù)過(guò)A0點(diǎn)的法線方程,計(jì)算得到法線在子午面平面直角坐標(biāo)系中的x軸截距x0′(如圖 3):
因此,在參考橢球上,初始點(diǎn)P0沿法線方向到赤道面的距離DP0P0′為:
A0處的子午圈橢圓曲率半徑計(jì)算式如下:
為求得點(diǎn)P1的緯度概略值B10作為迭代計(jì)算的初始值,將子午圈橢圓近似看作半徑為RA0的正圓,則B10計(jì)算式如下:
此時(shí),根據(jù)弧長(zhǎng)曲線積分,得此時(shí)沿真北方向的實(shí)際位移量為:
其中,θ10為P1點(diǎn)概略緯度所在位置對(duì)應(yīng)的橢圓參數(shù)方程角度參數(shù)。根據(jù)(3)式得θ10計(jì)算式如下:
根據(jù)定位精度要求,設(shè)定迭代閾值ε,作為實(shí)際位移量與實(shí)測(cè)位移量的容許偏差,若:
則重新計(jì)算未知點(diǎn)P1的緯度概略值:
迭代計(jì)算(8)到(10)式,直至|?SN0 -?SN| ≤ ε為止,即可得到滿足容許偏差要求的未知點(diǎn)P1的大地緯度精確值B1。
3.2 大地經(jīng)度與大地高方向位移量的計(jì)算
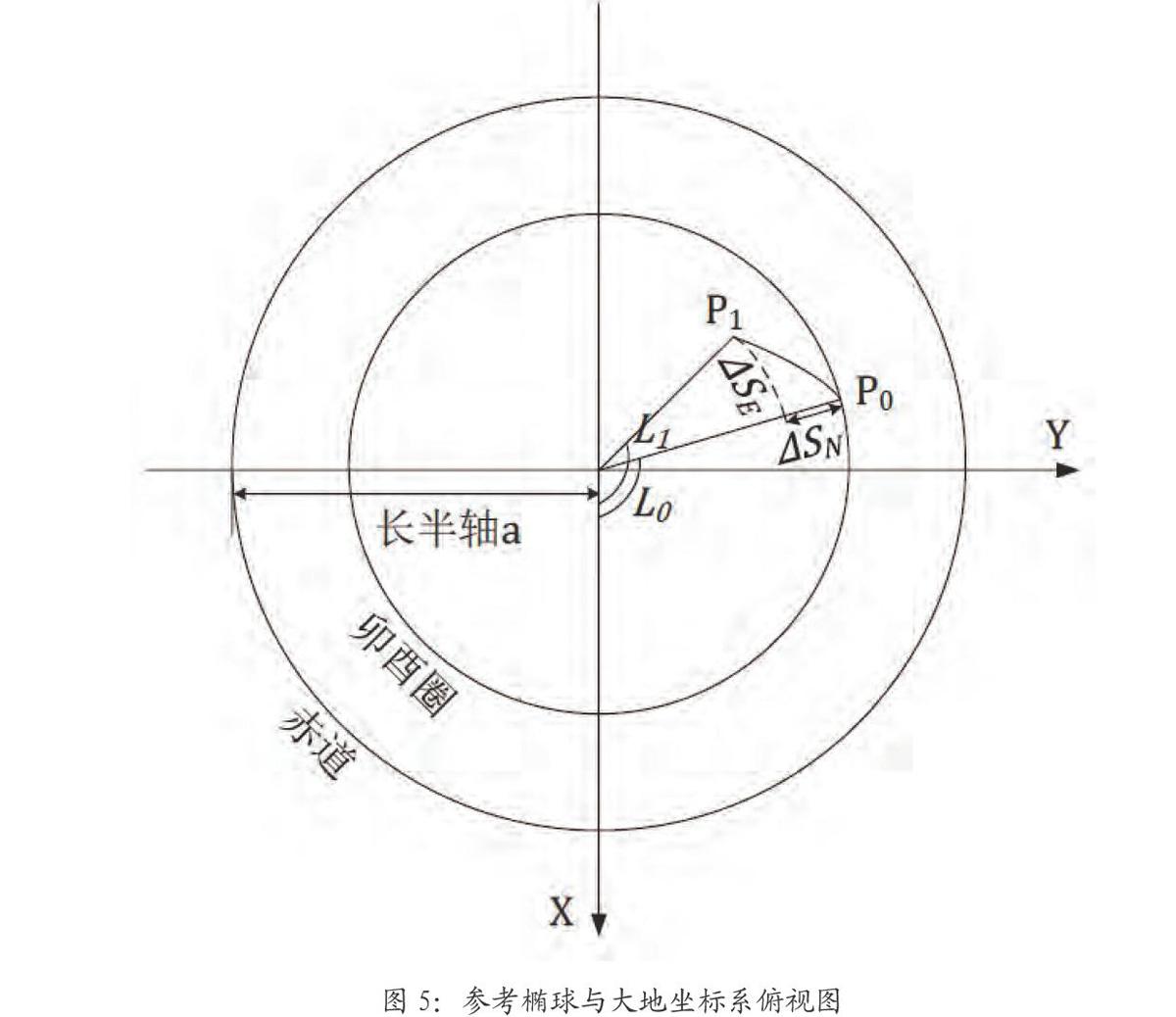
如圖 4 所示,與子午圈不同,參考橢球的卯酉圈(緯線圈)為正圓,因此可以利用圓的弧長(zhǎng)公式對(duì)大地經(jīng)度進(jìn)行計(jì)算。由上文可知,P0在參考橢球的投影點(diǎn)A0所對(duì)應(yīng)的卯酉圈半徑為A0橫坐標(biāo)x0,故大地經(jīng)度計(jì)算如下:
沿東西方向位移量?SE在參考橢球面上平行于卯酉圈方向的投影長(zhǎng)度?SE′為:
故未知點(diǎn)P1的大地經(jīng)度值L1計(jì)算式如下:
大地高為某點(diǎn)沿法線方向到參考橢球面的距離,該方向與慣導(dǎo)系統(tǒng)所依據(jù)的鉛垂線方向存在角度差異,即垂線偏差。垂線偏差的大小與地球重力場(chǎng)密切相關(guān)。由于垂線偏差一般僅有數(shù)秒,它所引起的物體在法線方向和鉛垂線方向的位移量偏差并非慣導(dǎo)系統(tǒng)在大地坐標(biāo)系中的主要誤差來(lái)源。若要將垂線偏差的影響考慮在內(nèi),可通過(guò) EGM2008 地球重力場(chǎng)模型解算,得待測(cè)目標(biāo)所在位置的垂線偏差子午圈分量(南北分量)ξ和卯酉圈分量(東西分量)η。則待測(cè)點(diǎn)大地高的計(jì)算式為:
4 計(jì)算實(shí)驗(yàn)
為驗(yàn)證上文所述位移參數(shù)在大地坐標(biāo)系中的嚴(yán)密算法,以全球定位系統(tǒng) GPS 所采
用的 WGS-84 大地坐標(biāo)系作為解算基準(zhǔn)(如表 1 所示),選取北半球中緯度地區(qū)某一范圍進(jìn)行
仿真計(jì)算實(shí)驗(yàn)。
設(shè)已知初始定位點(diǎn)P0大地坐標(biāo)(大地緯度、大地經(jīng)度和大地高)為:B0= 31°28′12.31′′ N;L0=104°00′00.00′′ E;H0=8900m。經(jīng)一定時(shí)間后,慣性導(dǎo)航系統(tǒng)三軸累積位移量為:?SN=1014872.756m;?SE=500000.000m;?SH= 600.000m。
利用計(jì)算機(jī)輔助設(shè)計(jì)軟件 Auto CAD 依據(jù)該仿真計(jì)算的初試設(shè)定參數(shù)進(jìn)行建模,得到WGS-84 大地坐標(biāo)基準(zhǔn)下的位移參數(shù)真實(shí)值作為參考。并分別以半徑R=6367445m的近似球體和 WGS-84 橢球?yàn)榛鶞?zhǔn),對(duì)三軸位移參數(shù)進(jìn)行大地坐標(biāo)換算。CAD 建模參考數(shù)據(jù)及兩種算法計(jì)算結(jié)果如表2所示。
從計(jì)算結(jié)果對(duì)比表中的相關(guān)數(shù)據(jù)可以看出,以 WGS-84 大地坐標(biāo)系為基準(zhǔn)的嚴(yán)密算法所得結(jié)果中的大地緯度與大地經(jīng)度同建模數(shù)據(jù)更為接近,偏差均在1′′以內(nèi),換算為橢球面距離偏差約為 3.6m;而以半徑恒定的正球體為基準(zhǔn)進(jìn)行近似計(jì)算,所得大地緯度與大地經(jīng)度同建模數(shù)據(jù)偏差的絕對(duì)值均超過(guò)50′′,換算為橢球面距離偏差約為 2238.2m。由于嚴(yán)密算法與近似算法的大地高計(jì)算方法相同,垂線偏差對(duì)大地高的影響十分微小,因此三者的大地高計(jì)算結(jié)果一致。該計(jì)算實(shí)驗(yàn)表明,相較于近似算法,嚴(yán)密計(jì)算方法明顯與建模數(shù)據(jù)更為接近,計(jì)算偏差值更小。
5 結(jié)論
通過(guò)對(duì)參考橢球和大地坐標(biāo)的分析,并對(duì)基于大地坐標(biāo)系的慣性導(dǎo)航位移參數(shù)轉(zhuǎn)換算法
進(jìn)行嚴(yán)密推導(dǎo),可得結(jié)論如下:
全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)與慣性導(dǎo)航系統(tǒng)(INS)在諸多層面互為補(bǔ)充,能夠滿足高精度航空導(dǎo)航的要求;GNSS 以極半徑和赤道半徑存在差值的參考橢球作為大地坐標(biāo)測(cè)量基準(zhǔn)。若以正球體代替參考橢球?qū)?INS 位移參數(shù)進(jìn)行換算,則計(jì)算結(jié)果與真實(shí)情況存在偏差,難以滿足較高的導(dǎo)航精度要求;通過(guò)基于大地坐標(biāo)系參考橢球的嚴(yán)密算法,可以實(shí)現(xiàn)慣性導(dǎo)航系統(tǒng)(INS)在三個(gè)正交方向位移參數(shù)基于全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)大地坐標(biāo)增量的嚴(yán)密計(jì)算,從而增強(qiáng)了 GNSS/INS 組合導(dǎo)航系統(tǒng)的穩(wěn)定性、可靠性和導(dǎo)航數(shù)據(jù)的精確性。
參考文獻(xiàn)
[1]魏光興.通信、導(dǎo)航、監(jiān)視設(shè)施[M].成都:西南交通大學(xué)出版社,2012:91-100.Wei Guangxing. Communication, Navigation, Surveillance equipment[M].Chengdu: Southwest Jiaotong University Press, 2012:91-100.
[2]蔣慶仙,田育民,孫葵.北斗/INS組合導(dǎo)航關(guān)鍵技術(shù)分析[J].全球定位系統(tǒng),2010(06):56-60.Jiang Qingxian, Tian Yumin, Sun Kui.The Crucial Technologies in INS/BD Integrated Navigation System[J].GNSS world of china,2010,06:56-60.
[3]徐紹銓?zhuān)瑥埲A海,楊志剛.GPS測(cè)量原理及應(yīng)用[M].武漢:武漢大學(xué)出版社, 2008.Xu Shaoquan,Zhang Huahai,Yang Zhigang. Measurement Principle and application of GPS[M].Wuhan:Wuhan University Press,2008.
[4]黃金山.GPS/SINS/SAR組合導(dǎo)航系統(tǒng)信息融合及誤差修正技術(shù)研究[D].西安:西安電子科技大學(xué),2010.Huang Jinshan. Research on GPS/SINS/SAR Integrated Navigation Information Fusion and Error Correction Technology[D]. Xidian University, 2010.
[5]肖進(jìn)麗,潘正風(fēng),黃聲享.GPS/INS 組合導(dǎo)航系統(tǒng)時(shí)間同步方法研究[J].測(cè)繪通報(bào),2007(04):27-29+58.Xiao Jinli, Pan Zhengfeng,Huang Shengxiang. Time Synchronization Method of GPS/INS Integrated Navigation System, Bulletin of Surveying and Mapping,2007,04:27-29+58.
[6]Grewal M S,Weill L R,Andrews A P. Global Positioning Systems,Inertial Navigation and Integration[M].A John Wiley & Sons,Inc.Publication,2007:133-134.
[7]劉智平,畢開(kāi)波.慣性導(dǎo)航和組合導(dǎo)航基礎(chǔ)[M].北京:國(guó)防工業(yè)出版社,2013.Liu Zhiping,Bi Kaibo.Fundamentals of Inertial Navigation and Integrated Navigation[M].Beijing:National Defend Industry Press,2013.
[8]同濟(jì)大學(xué)數(shù)學(xué)系.高等數(shù)學(xué)[M].北京:高等教育出版社,2007.Department of mathematics,Tongji University. Advanced Mathematics[M].Beijing: Higher Education Press, 2007.
[9]章傳銀,郭春喜,陳俊勇,等.EGM 2008 地球重力場(chǎng)模型在中國(guó)大陸適用性分析[J].測(cè)繪學(xué)報(bào),2009(04):283-289.Zhang Chuanyin,Guo Chunxi,Chen Junyong, et al.EGM 2008 and Its Application Analysis in Chinese Mainland[J]. Acta Geodaetica et Cartographica Sinica,2009,04:283-289.
