基于SIMULINK的車輛防抱死制動系統(tǒng)控制研究
2016-10-21 03:10:16李振興周晶晶
價值工程 2016年7期
關(guān)鍵詞:仿真
李振興 周晶晶

摘要: 利用Simulink軟件建立車輛防抱死制動系統(tǒng)的仿真模型;基于PID控制原理設(shè)計以車輪滑移率為控制對象的防抱死制動系統(tǒng)控制器,對防抱死制動控制系統(tǒng)進行仿真。將普通制動系統(tǒng)與防抱死制動系統(tǒng)仿真結(jié)果進行對比,結(jié)果表明PID控制的防抱死制動系統(tǒng)能有效提高車輛的方向操縱性和制動效能。
Abstract: Firstly, the simulation model of Anti-lock braking system is established by the software of simulink; Secondly, this paper designs a kind of Anti-lock Braking System(ABS) controll system and targeted at the wheel slip ratio based on the PID control strategy, which simulated the system of ABS and analysed the result. The simulation results of the ordinary brake system is contrasted with the Anti-lock braking system, and the results show that PID control ofAnti-lock braking system can effectively improve the direction of the vehicle maneuverability and braking performance.
關(guān)鍵詞: 防抱死制動系統(tǒng);PID;仿真
Key words: anti-lock brake system;PID;simulation
中圖分類號:U463.33 文獻標(biāo)識碼:A 文章編號:1006-4311(2016)07-0102-03
0 引言
汽車防抱死制動系統(tǒng)是提高車輛行駛安全的重要裝置[1]。它能防止車輛在制動時車輪抱死滑移,保障車輛的行駛穩(wěn)定性和轉(zhuǎn)向操縱性,同時能有效地縮短制動距離,減少交通事故的發(fā)生。
防抱死制動系統(tǒng)中最重要的部件是防抱死制動控制器,它決定了防抱死制動系統(tǒng)系統(tǒng)的性能,而控制器的核心是控制算法的選擇。目前大部分車輛上采用的是基于經(jīng)驗的邏輯門限控制方法,它的方法簡單實用,但調(diào)試比較困難,采用經(jīng)驗的方法,不同的車輛需要不同的匹配技術(shù),需要比較多的道路試驗加以驗證,算法實施復(fù)雜而且魯棒性不強。PID控制算法原理簡單,使用方便;適應(yīng)性強;魯棒性強。因此,應(yīng)用PID控制理論,在SIMULINK中仿真研究防抱死制動系統(tǒng)的控制策略及其控制效果。
1 系統(tǒng)模型建立
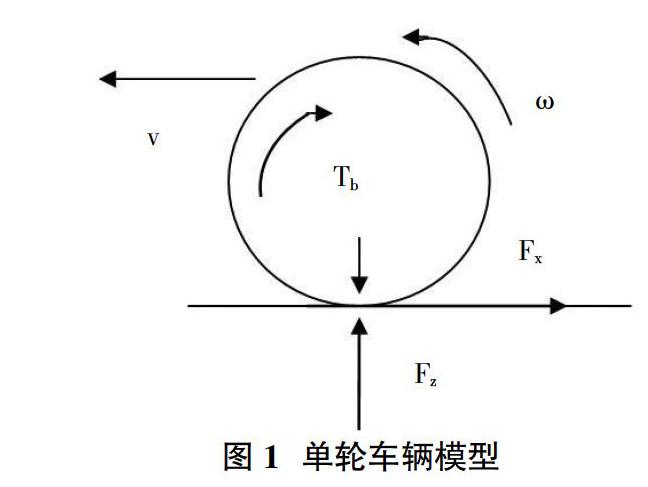
1.1 單輪車輛模型
為簡化研究問題,采用單輪車輛系統(tǒng)模型如圖1所示,忽略空氣阻力和車輪滾動阻力;車輛質(zhì)量均勻分布在每個車輪上,輪胎的機械特性相同;車輛在水平公路上行駛[2]。
根據(jù)圖1,得到車輛動力學(xué)方程:
式(1)~(3)中:m為1/4車輛質(zhì)量;v為車輛縱向速度;Fx為車輪縱向附著力;I為車輪轉(zhuǎn)動慣量;?棕為車輪轉(zhuǎn)動角速度;R為車輪半徑;Tb為制動力矩;?滋為車輪與地面間的附著系數(shù);Fz為地面對車輪支撐力。
1.2 車輪輪胎模型
輪胎模型是指車輛在制動過程中,附著系數(shù)和各相關(guān)參數(shù)之間的函數(shù)關(guān)系[3]。輪胎的附著系數(shù)受多種因素影響,除了滑移率,還有輪胎的花紋、材料及路面的狀況等。在實際情況下,人們在建立輪胎模型時很難將所有的影響因素都考慮進去,只考慮了對附著系數(shù)影響大的因素。目前,人們常用的輪胎模型有魔術(shù)公式輪胎(經(jīng)驗公式模型)和雙線性公式模型(半經(jīng)驗公式模型)兩種[4]。
采用雙線性公式模型,其擬合精度較高,計算方便,比較適合用于模擬仿真研究。
表達式如下:
滑移率的表達式如下:
滑移率常用來衡量制動時車輪的滑移程度,車輪在純滾動時滑移率為0;車輪抱死在純滑動時滑移率為100%;車輪邊滾動邊滑動時滑移率在0~100%之間。實驗證明,滑移率在15%~20%時附著系數(shù)最大,制動效果最佳。
1.3 車輛制動系統(tǒng)模型
制動系統(tǒng)模型包括傳動機構(gòu)模型和制動器模型兩部分。采用液壓傳動機構(gòu),為簡化模型,忽略壓力傳送的延遲因素和電磁閥環(huán)節(jié),液壓傳動系統(tǒng)簡化為一階慣性環(huán)節(jié)和一個積分環(huán)節(jié)[6]。由于電磁閥的響應(yīng)時間通常小于等于10 ms,所以液壓傳動系統(tǒng)的一階慣性環(huán)節(jié)的傳遞函數(shù)為:
制動器模型指的是制動器力矩和制動液壓之間的關(guān)系的模型,建模前假定制動器為理想的元件,理解為其非線性特性比較弱且不計其滯后所產(chǎn)生的影響。制動器表達式如下:
2 PID控制器設(shè)計
PID控制器是一種線性控制器,是根據(jù)設(shè)定值與實際輸出值的偏差作為控制器的輸入信號。PID的控制算法如下式:
式(8)中,Kp為比例放大系數(shù),比例系數(shù)增大,控制系統(tǒng)的余差減小,但振蕩加劇;Ki為積分系數(shù),其數(shù)值過大,降低控制系統(tǒng)的穩(wěn)定性;Kd為微分系數(shù),其數(shù)值增大,減小系統(tǒng)的超調(diào)量,減小調(diào)節(jié)時間,但過強會導(dǎo)致系統(tǒng)穩(wěn)定性降低。
設(shè)計的PID控制器是以車輪滑移率為控制目標(biāo),通過傳感器采集汽車行駛過程中的車速和輪速信息,計算出車輪的實際滑移率。車輪的實際滑移率與期望滑移率之間的差值即為PID控制器的輸入,輸出為制動器壓力。控制策略如圖2所示。
比例系數(shù)、積分系數(shù)和微分系數(shù)的參數(shù)選擇決定了PID控制器的控制效果。按照先比例,再積分,最后微分的順序進行參數(shù)的設(shè)定。經(jīng)多次調(diào)試后的PID控制器的參數(shù)為Kp=230,Ki=200,Kd=3。期望滑移率為0.2。根據(jù)上述控制策略和參數(shù),設(shè)計PID控制器仿真模塊如圖3所示。
3 控制系統(tǒng)仿真
根據(jù)上述車輛模型數(shù)學(xué)表達式及設(shè)計的PID控制器,在SIMULINK軟件中建立防抱死制動控制系統(tǒng)仿真模型,模型如圖4所示。
選取某轎車為研究對象,主要仿真參數(shù)如下:1/4車輛質(zhì)量=390kg;車輪半徑R=0.268m;車輪轉(zhuǎn)動慣量I=1.4852kg·m2;初始車速v=20m/s;路面參數(shù)選擇高附著系數(shù)。求解器選取變步長模式ode45s,仿真時間設(shè)定為3秒。
4 仿真結(jié)果與分析
制動系統(tǒng)的性能評定指標(biāo)有:制動距離、制動時間、車輪滑移率、制動減速以及制動時地面的附著系數(shù)等。
在仿真結(jié)果中選取車輪滑移率與時間關(guān)系曲線;制動減速度與時間關(guān)系曲線;地面附著系數(shù)與時間關(guān)系曲線;車速&輪速與時間關(guān)系曲線以及制動距離。對比普通制動系統(tǒng)與有PID控制的防抱死制動系統(tǒng)的仿真結(jié)果,如圖5~9所示。
從圖5~9可以看出,在沒有防抱死制動控制的普通制動情況下,車速從20m/s到車輛完全停止經(jīng)過了2.97秒,而輪速經(jīng)過0.22秒后就下降到0,同時滑移率為1,車輪出現(xiàn)抱死狀況。制動距離為30.29m,制動減速度在6.85左右,同時地面的附著系數(shù)為0.7。加入PID防抱死制動控制環(huán)節(jié)后,車輛由初始速度20m/s到車輛停止用時為2.65秒,整個制動過程中,車輪轉(zhuǎn)速沒有迅速下降到0,而是隨著車速一起變?yōu)?,車輪沒有出現(xiàn)抱死狀況,并且車輪滑移率始終在期望值0.2附近。制度距離為27.45m,制動減速度在7.85左右,同時地面的附著系數(shù)為0.8。由此可見PID控制下的防抱死制動系統(tǒng)具有良好的控制效果,與常規(guī)制動相比,制動時間縮短了10.7%,制動距離減少了9.4%,同時滑移率在期望值附近,并且在整個過程中無較大波動情況,穩(wěn)定性較好。
5 結(jié)語
在制動系統(tǒng)車輛模型的基礎(chǔ)上,運用PID控制理論,基于SIMULNK平臺研究以滑移率為控制目標(biāo)的車輛防抱死制動系統(tǒng)。通過仿真對比分析,PID控制的防抱死制動系統(tǒng)能有效的提高車輛制動時的方向操縱性和制動效能。
參考文獻:
[1]余志生.汽車?yán)碚揫M].北京:機械工業(yè)出版社,2000.
[2]喻凡.車輛動力學(xué)及其控制[M].北京:人民交通出版社,2004.
[3]程軍.汽車防抱死制動系統(tǒng)的理論與實踐[M].北京:北京理工大學(xué)出版社,1999.
[4]葉磊,尹作發(fā).基于Matlab/Simulink的車輛制動過程分析[J].公路與汽運,2006(6):5-7.
[5]M.Gavas, M.Izciler. Deep drawing with anti-braking system(ABS)[J]. Mechanism and Machine Theory, 2006,Vol41(12):1467-1476.
[6]程軍.汽車防抱死制動系統(tǒng)的控制方法分析[J].汽車技術(shù),1992(10):1-8.
猜你喜歡
中國教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
