基于藍牙和數傳模塊的小型四旋翼無人機通信系統設計
2016-10-22 03:37:43施洪平李志宇徐義華
電子設計工程 2016年17期
施洪平,李志宇,徐義華
(1.南京航空航天大學自動化學院,江蘇南京210016;2.南京航空航天大學無人機研究院中小型無人機先進技術工信部重點實驗室江蘇南京210016;3.空軍駐江蘇地區軍事代表室江蘇南京210016)
基于藍牙和數傳模塊的小型四旋翼無人機通信系統設計
施洪平1,李志宇2,徐義華3
(1.南京航空航天大學自動化學院,江蘇南京210016;2.南京航空航天大學無人機研究院中小型無人機先進技術工信部重點實驗室江蘇南京210016;3.空軍駐江蘇地區軍事代表室江蘇南京210016)
為實現四旋翼無人機與安卓地面站的無線通信,文中設計了一種基于藍牙和數傳模塊的通信系統。系統由藍牙Hc06模塊、控制器C8051F930和數傳Si4432模塊組成。文中介紹了系統組成模塊的特點,設計并實現了軟硬件方案,并使設計的功耗最低化,詳細闡述了設計過程中解決的重要技術問題。通過實驗驗證,本系統能以較高質量在1.5 km范圍內進行無線通信。
藍牙;數傳;四旋翼無人機;無線通信
四旋翼無人機是一種具有4個螺旋槳的飛行器,并且四個螺旋槳分為兩組呈十字形交叉結構,兩組的旋轉方向不同,而相對的螺旋槳旋轉方向相同。與傳統的直升機不同,四旋翼直升機只能通過改變螺旋槳的速度來實現各種動作。四旋翼無人機體積小、機動性好、結構較簡單、性價比高,因此在軍事和民用方面有巨大的應用價值,是目前研究的一個熱點。
四旋翼無人機地面站是無人機系統的信息控制中心,主要負責飛行器的數據接收與處理、電子地圖定位、飛行姿態顯示、軌跡導航、任務規劃、圖像接收與處理等重要功能,集通訊、顯示、控制及數據處理于一體。而安卓地面站又是一種新興的地面站,與傳統地面站比較,安卓地面站既實現了主要功能,又兼有質量輕易攜帶、工作時間長、移植性強等優點。
本設計解決的核心問題是實現四旋翼無人機和安卓地面站之間的無線通信。由于安卓手機自帶藍牙功能,藍牙的有效通信距離是10m,而數傳電臺的通信距離能達到2~3公里甚至更遠。本設計通過藍牙結合數傳電臺和四旋翼通信,提出了一種新的無線的地面系統和四旋翼機載平臺的通訊方式的設計思路。
1 通信系統設計
1.1系統總體方案
無線通信系統的結構框圖如圖1所示,安卓地面站通過藍牙發送數據時,藍牙模塊Hc06接收數據并經串口傳輸給發送模塊中的C8051F930單片機,其再將數據轉送給數傳芯片Si4432進行編碼,然后以特定的格式發送出去。當接收模塊接收到發送模塊傳來的信號后,對射頻信號進行放大、解調,再將數據發送至C8051F930單片機進行相應的處理,最后通過串口傳輸給四旋翼機載平臺;而當機載平臺發送數據時,通過上述通信鏈路的逆向傳輸也可以使數據傳輸至安卓地面站。
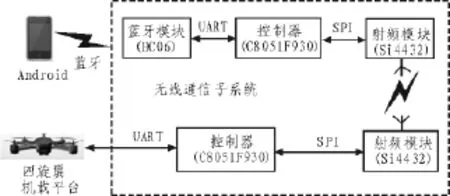
圖1 無線通信系統框圖
1.2系統硬件選擇
數傳模塊選用無線數傳芯片Si4432。它是Silicon Labs公司生產的一款EZRadioPRO系列無線收發芯片,具有多頻段、低功耗、高集成度等特點。Si4432芯片輸出功率可達+20 dBm,接收靈敏度達到-121 dBm,可提供對數據包處理、數據緩沖FIFO、接收信號強度指示(RSSI)、空閑信道評估(CCA)、喚醒定時器、低電壓檢測、溫度傳感器、8位AD轉換器和通用輸入/輸出口等功能的硬件支持。Si4432在使用時對外部元件的依賴性較小,配置若干電容、電感和一個30 MHz的晶振就可組成一個可靠性較高的數據收發系統,從而大大減小了二次開發的工作量。
控制芯片選用Silicon Labs公司的C8051F930單片機。它有64KB的Flash和4KB的RAM,并且集成了豐富的外圍模塊(包括10位A/D轉換器、SPI、串口等),完全滿足本系統的設計需求;有多種電源管理模式(如正常模式、休眠模式、空閑模式等),內部集成的2個內建欠壓檢測器分別適用于正常模式和休眠模式,在休眠模式下電流僅為50 nA。C8051F930單片機包括一個效率很高的直流升壓轉換器,最多提供65 mW給內部微控制器和其他元器件,在功耗方面它也做到了極致,其省電架構能將操作模式下的電流減小到170 μA/MHz。
為了減少設計風險和加快開發進程,藍牙模塊選用了廣州匯承信息科技有限公司推出的Hc06模塊,Hc06藍牙模塊采用CSR公司的BC417藍牙芯片,使用藍牙V2.0協議標準。模塊供電電壓為3.3~3.6V,模塊尺寸大小為27 mm×13 mm× 2 mm,工作電流不大于50 mA,功耗較低。Hc06模塊的有效通信距離可達到10m,并且通過AT指令可以對藍牙通信的波特率和配對密碼進行修改。
1.3系統硬件設計
C8051F930單片機利用SPI接口來控制數傳Si4432的工作模式,并實現讀寫狀態寄存器、讀寫緩沖數據等功能。SPI接口包括主輸入、從輸出(MISO),主輸出、從輸入(MOSI)和串行時鐘(CLK)。主機用CLK與從機時鐘同步。C8051F930單片機除了完成基本的芯片初始化工作、數據的發送和接收之外,還要求能夠根據需求在數傳Si4432的引腳產生中斷,并由所編寫的中斷處理程序進行狀態識別和狀態切換,執行相應的中斷處理,從而使得無線通信可以在發射、接收和待機之間轉換。
C8051F930單片機通過UART接口和SPI接口主要完成下面兩個方面工作:
1)C8051F930單片機通過SPI接口配置數傳Si4432的工作參數,主要是對相應的配置寄存器進行設置。
2)在發射模式下,C8051F930單片機通過UART接口接收藍牙Hc06模塊發送來的數據,再通過SPI接口時序要求將發送數據寫入數傳Si4432的發送寄存器中;在接收模式下,C8051F930單片機將數傳Si4432接收到的數據通過SPI接口讀入到接收緩沖區,再通過UART接口發送給藍牙Hc06模塊。
數傳Si4432與微控制器C8051F930是采用SPI接口進行通信的,所以只需要把數傳Si4432的SPI接口與狀態引腳與單片機相連即可完成兩者之間的硬件連接。而藍牙模塊Hc06與控制器C8051F930之間是采用UART接口進行通信的,所以只需把藍牙Hc06的Rx和Tx引腳分別接上C8051F930單片機的Tx和Rx引腳即可。硬件連接部分原理圖如圖2所示。
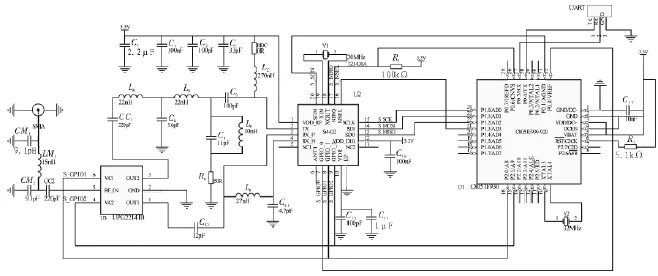
圖2 微控制器C8051F930和數傳芯片Si4432硬件連接圖
1.4系統軟件設計
1.4.1軟件主流程
軟件的開發環境為keiluVISION4,使用的語言為keilC51。軟件的功能主要為了完成C8051F930單片機和數傳Si4432的初始化;與藍牙模塊Hc06進行通信;對數傳Si4432的管理;完成數據的無線傳輸。系統軟件的主要流程圖如圖3所示。
首先對C8051F930單片機、數傳Si4432和藍牙Hc06進行初始化,再判斷UART是否有來自藍牙的完整的數據包,如果有完整數據包則繼續判斷是否是配置命令包,是則進行相應的配置操作,不是則通過數傳Si4432發送數據;如果沒有完整數據包則判斷是否產生數傳Si4432的中斷,是則處理其相應事件,通過UART向藍牙發送接收的數據。軟件采用中斷驅動模式,因此可以最大程度降低功耗,即在沒有任何外部中斷觸發時,C8051F930單片機將進入空閑模式;否則,被喚醒,并執行相關的操作,在執行完當前操作后,再次進入空閑模式。RSSI信號是對接收信號強度的評估值,最后將該值返回至安卓地面站,從而讓地面站實時地了解當前的信號質量。

圖3 軟件主流程圖
1.4.2C8051F930單片機的編程要點
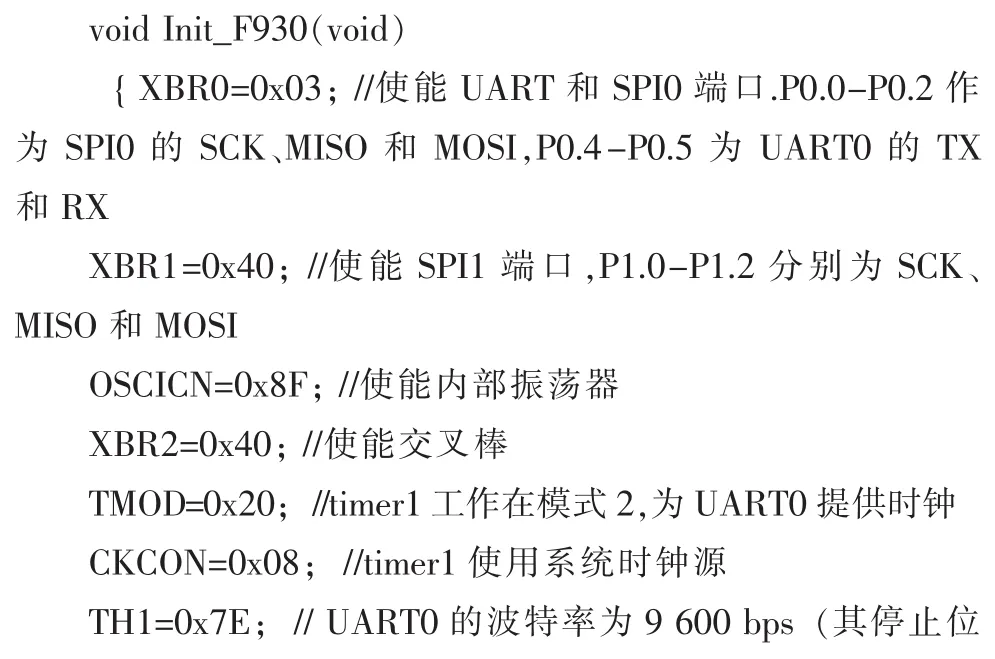
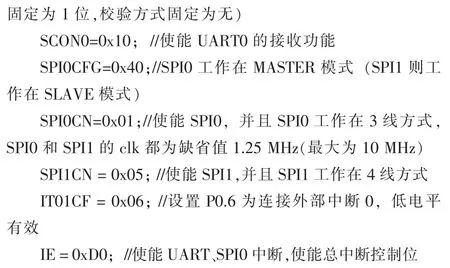
C8051F930是一個支持混合信號的單片機,在使用前必須對它進行初始化,而在運行過程中,在模塊不影響正常工作的前提下,可以充分利用其低功耗特性,把系統功耗降到最低。可根據寄存器的定義或者可視化的配置工具來對單片機進行初始化,內容包括端口、URAT、定時器、振蕩器、SPI和中斷的初始化。下面為初始化代碼片段。
1.4.3數傳Si4432的編程要點
1)寄存器操作
數傳Si4432共有128個寄存器,通過SPI接口對它們的進行訪問來控制芯片的工作方式和記錄工作狀態。SPI的bit順序是可配置的,配置缺省時與MCU的順序相同,命令格式為兩字節結構:讀/寫標志(1bit,0為讀,1為寫),寄存器地址(7bit)+待寫入數據。每次可由時鐘信號來決定讀寫一至多個字節,即在讀寫一個字節后,如果時鐘仍然有效,那么,地址將會自動加1,對下一個寄存器繼續進行讀寫。通過Silicon Labs提供的WDS(WirelessDevelopment Suit)也可訪問上述寄存器,并可生成相應的代碼進行初始化。要注意的是只能在空閑狀態下對寄存器進行初始化,否則將可能出現意外結果。為提高傳輸信號的質量,保證數據的可靠性,增大通信距離,系統采用GFSK調制并使能數據白化、CRC校驗、曼徹斯特(Manchester)編碼。
2)狀態機
在完成不同的功能時,芯片所處的狀態是不同的。這些狀態在滿足一定的條件時可實現相互轉移。狀態機如圖4示。
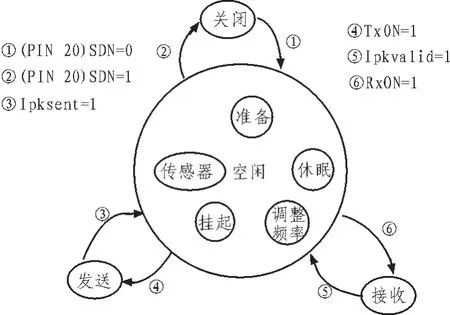
圖4Si4432的狀態轉移圖
由上圖可以看出,數傳Si4432有空閑、關閉、發送、接收幾種狀態,其中空閑和關閉狀態為低功耗狀態。而空閑狀態又可細分為傳感器、準備、休眠、掛起、調整頻率5種子狀態,它們主要是為了低功耗地完成各種與無線數據收發無關的操作。發送和接收兩種狀態又統稱為激活狀態,它們主要用來完成無線數據的發送和接收。除了關閉狀態只能通過單片機的I/O腳來設置外,其它狀態都可以通過SPI接口來設置和讀取。對于當前狀態的檢測,可通過訪問02h寄存器來獲取。對于狀態的切換,可以通過寫寄存器07h來實現,其不僅可以使狀態立即發生改變,而且可以決定在完成收發任務后返回到空閑狀態的哪一個子狀態(本系統設置為休眠狀態,即enwt=1)。數傳Si4432還有個喚醒定時器,利用它來定時喚醒芯片進入Rx狀態,可以保證數據不被漏收,即設置定時常數寄存器14 h和19 h中的值,并設置08 h寄存器中的enldm位為1,確認收完數據后再返回到原來的空閑子狀態。
2 系統的低功耗設計
由于系統的耗電主要集中在C8051F930單片機和數傳Si4432模塊,而它們都具備低功耗運行功能。C8051F930單片機有正常、停止、空閑、掛起和休眠5種功率模式,電源管理單元對這些模式進行管理和切換。設置C8051F930單片機的常態為休眠,在收到任何中斷后,單片機將從休眠模式切換到正常模式;而在完成相應的任務后,單片機又立即從正常模式切換回休眠模式。同時單片機禁止所有不用的模擬端口,設置數字外設為低功率工作模式。并且利用C8051F930單片機內部集成的DC-DC升壓模塊的輸出電源給藍牙Hc06模塊和數傳Si4432芯片供電,這使得該模塊的電源可以低至0.9V。在數傳Si4432方面,由于芯片內部集成的功放(PA)的輸出功率是可編程的,大小可為11、14、17或者20 dBm,因此可根據RSSI的值來動態調整輸出功率的值。當RSSI的值較小時,可增大輸出功率,反之則減小功率。
3 軟硬件設計策略
在硬件和軟件設計的過程中,本設計也遇到若干問題。在硬件設計初期,由于未考慮PCB板的耦合效應以及射頻電路的特殊性,導致數傳Si4432的射頻模塊工作并不穩定,信號時好時壞。所以在設計PCB時應盡量消去電路元件間的耦合效應,走線應避免信號輸入輸出端,使各電感保持相互垂直,電源端增加去耦電容和旁路電容;射頻電路應盡量選用較小封裝的元器件,所布信號線應盡可能短,并盡量減少過孔數目。而在軟件設計過程中,在狀態轉換時也遇到轉換失敗的問題,原因是數傳Si4432狀態轉換前需要先進入掛起狀態再等待15 ms;之后遇到在沒有發送喚醒的情況下接收端數傳Si4432自動產生下降沿中斷問題,發現是由于同步字檢測中斷設置過于簡單,數傳Si4432易受空氣中無線電波干擾;在通信前也必須要先設置藍牙Hc06的波特率使其與數傳Si4432一致。下面是硬件和軟件設計時為避免錯誤使用的一些策略。
3.1硬件設計策略
1)對整個PCB板都覆地銅,以減少輻射效應。數傳Si4432芯片的外圍元件使用體積小的0402封裝貼片器件。其中電感是關鍵部分,應選用高精度電感。
2)數傳Si4432的扼流電感LC應盡量靠近Tx引腳;并聯在RX_N和RX_P上的電感LR應與LC垂直布局;Tx通道上的電感LM、LH、LO也需要保證相互垂直以減少耦合。同時PCB板上其它走線應盡量避免Tx/Rx區域,防止產生耦合效應。
3)為得到更好濾波性能,濾波電容應盡量靠近相應管腳。電源接入端需添加去耦電容,且盡量靠近Si4432芯片。
3.2軟件設計策略
1)對數傳Si4432初始化時,應先設置其處于空閑狀態。
2)數傳Si4432發送和接收之間可以相互轉換,但是轉換之前需要先進入掛起狀態然后至少15 ms之后再進入發送或者接收狀態。故while(1)函數之前就將其配置為掛起狀態:SI4432_WriteReg(0x07,?0x01)。
3)數傳Si4432在低功耗模式下的同步字檢測中斷,容易被空氣中其他無線電波干擾觸發,故設置同步字為3-4位并打開檢測超時,PRABL設置為20位,寄存器33的最高位設置為0。
4)在對C8051F930單片機初始化后,利用UART口發送AT指令給藍牙Hc06模塊,以修改藍牙的波特率和數傳Si4432一致,本系統默認設置為115 200 bps。
4 系統測試與分析
為驗證本無線通信系統設計的可靠性,進行了6組“安卓地面站—四旋翼機載平臺”通信實驗。在空曠地通信距離約為1 500m時,6組“安卓地面站—四旋翼機載平臺”分別工作在430MHz、431MHz、432MHz等6個中心頻率上,帶寬取常用串口通信頻率,發送3 000個數據包,實驗結果如表1所列。
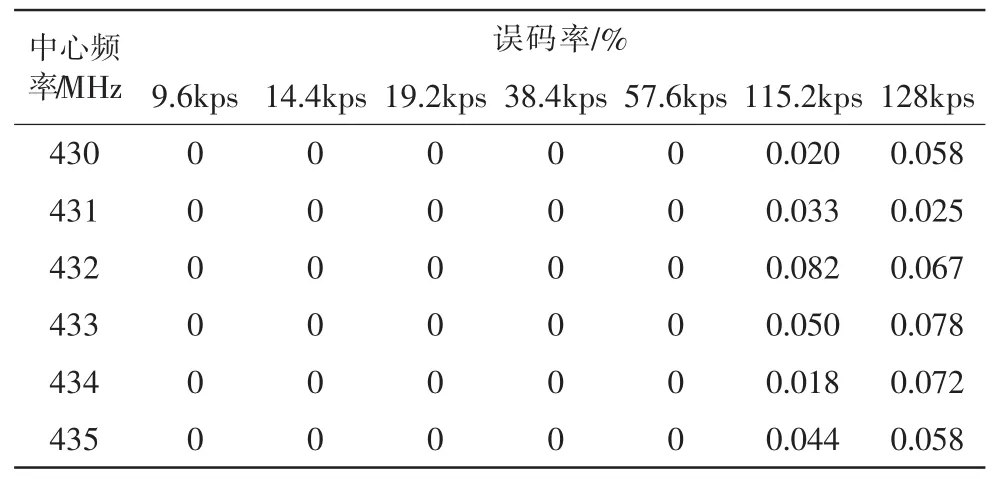
表1 系統在6組不同中心頻率及常用波特率下的通信誤碼率
從以上實驗結果分析,當系統的傳輸速率較低時,誤碼率為0;當系統的傳輸速率大于115 200 bps時,存在一定的誤碼率,但誤碼率較低。故得出以下結論:該無線通信系統傳輸距離可達1.5 km以上,并且誤碼率較低,通信穩定,能夠應用在四旋翼機載平臺和安卓地面站的通信上。
5 結束語
本系統設計為實現四旋翼無人機和安卓地面站之間的無線通信。通過藍牙Hc06模塊、單片機C8051F930、數傳Si4432的配合開發,最終實現這一目的。并且經過大量測試,證明該系統穩定、可靠,高質量通信距離達到1.5 km左右,如果需要更遠的通信距離,相應提高數傳模塊的功率即可。而且,該系統方案不僅可應用在無人機地面站上,在其他數據傳輸和通信領域也有較好的應用前景。
[1]肖征宇.無人機地面站軟件的設計與實現[D].杭州:浙江大學,2010.
[2]金大鵬.四旋翼無人飛行器控制器的設計與實現[D].沈陽:東北大學,2010.
[3]孫雨.小型無人機通信系統的研究與構建[D].廣州:華南理工大學,2011.
[4]潘旭兵.基于Si4432的無線收發模塊的設計[J].計算機應用,2009,12(29),189-192.
[5]郭亮.基于Si4432的無線射頻收發系統設計[J].單片機與嵌入式系統應用,2009(11)38-41.
[6]Burdakov A O.Positioning Unmanned Aerial Vehicles as Communication Relays for SurveillanceTasks[C]//In Proceedings of the 5th Robotics:Science and Systems Conference(RSS),Seattle,Washington,2009.
[7]Dynia M.Maintaining communication between an explorer and a base station[J].Biologically Inspired Cooperative Computing,2006:137-146.
The communication system of small quadrotor UAV based on bluetooth and digital radio
SHI Hong-ping1,LI Zhi-yu2,XU Yi-hua3
(1.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Research Institute of Unmanned Aerial Vehicle,Nanjing University of Aeronautics and Astronautics,Middle and Small Size UAV Advanced Technique Key Laboratory of Ministry of Industry and Information Technology,Nanjing 210016,China;3.Office of Air Force Military Affairs Delegate for Jiangsu Area,Nanjing 210016,China)
In order to realize the communication between small quadrotor UAV and its ground station based on android,One kind of communication system based on bluetooth and digital radio is presented in this paper.This kind of system is consisted of bluetooth Hc06 module,controller C8051F930,and digital radio Si4432 module.This paper introduces the characteristics of the modules of system.Software and hardware scheme are designed and realized in this paper,which making the design costs minimum power at the same time.This paper also expounds the important technical problems in the design process.The experimental results show that this kind of system is high qualified within the scope of 1.5 km for wireless communication.
buletooth;digital radio;quadrotor UAV;wireless communication
TN923
A
1674-6236(2016)17-0081-04
2015-09-23稿件編號:201509160
總裝預研資助項目(51325010601)
施洪平(1991—),男,江蘇鎮江人,碩士研究生。研究方向:嵌入式系統應用、飛行控制系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
