三節點單拉桿式軸箱定位剛度研究
2016-10-25 09:02:43劉高坤劉啟昂
鐵道機車車輛 2016年3期
張 江, 劉高坤, 劉啟昂
(1 克諾爾車輛設備(蘇州)有限公司, 江蘇蘇州 215011;2 中鐵第四勘察設計院, 湖北武漢 430063;3 西南交通大學 牽引動力國家重點實驗室, 四川成都 610031)
?
三節點單拉桿式軸箱定位剛度研究
張江1, 劉高坤2, 劉啟昂3
(1克諾爾車輛設備(蘇州)有限公司, 江蘇蘇州 215011;2中鐵第四勘察設計院, 湖北武漢 430063;3西南交通大學牽引動力國家重點實驗室, 四川成都 610031)
推導了三節點單拉桿式軸箱定位剛度的理論計算公式,然后利用SIMPACK建立了三節點單拉桿的物理模型,通過該模型驗證了理論公式的正確性,同時探討了拉桿等效剛度的影響因素。結果表明:三節點單拉桿等效剛度的理論計算公式能夠反映實際情況,拉桿的橫向、縱向和垂向等效剛度誤差均在10%范圍內;拉桿縱向長度對拉桿的橫向和垂向等效剛度影響明顯,當長度增加時,橫向和垂向等效剛度顯著減小;拉桿不對稱因素對拉桿的橫向、垂向等效剛度無影響,而對拉桿縱向等效剛度影響明顯,且隨著不對稱因素的增加,拉桿縱向等效剛度先增大后減小,最后趨于平穩;拉桿的橫向等效剛度隨著拉桿橫向長度的增加而近似呈線性增加。
三節點單拉桿; 軸箱定位剛度; 拉桿等效剛度
三節點單拉桿(以下簡稱拉桿)軸箱定位結構如圖1,通過拉桿兩端3個橡膠關節連接軸箱與構架,通常兩個關節與構架安裝座連接,另一端關節與軸箱體連接。三節點拉桿軸箱定位結構較為緊湊,可在有限的結構空間內實現較大的軸箱橫向定位剛度。軸箱垂向定位剛度主要由一系彈簧提供,軸箱橫向和縱向定位剛度主要由拉桿的橡膠關節提供。三節點拉桿式軸箱定位可實現較大的橫向剛度和一系懸掛垂向靜撓度,對機車車輛來講增大轉向架一系彈簧的柔度有利于降低輪軌垂向力。
根據軸箱彈簧布置型式可分為兩類:一系彈簧對置(主要用于機車)和一系彈簧頂置(主要用于地鐵車輛)。
目前,我國鐵道機車車輛中采用三節點單拉桿式軸箱定位方式的主要是CRH5[1],通過對該種定位方式的定位剛度的研究為我國鐵路機車車輛轉向架一系定位設計計算提供參考。

圖1 三節點單拉桿軸箱結構圖
1 拉桿等效剛度計算
針對一般的拉桿進行剛度分析,假設拉桿的三邊的長度不同,且三個節點的剛度也不同,拉桿的幾何參數如圖2所示。節點A與軸箱連結,節點B、C與轉向架構架相連。關節參考坐標采用統一的鐵路坐標系表示,如圖2,拉桿相關參數及符號如表1所示。

圖2 拉桿幾何參數
1.1拉桿縱向等效剛度kx
當拉桿的∠ACB或∠ABC不為鈍角時,拉桿節點A的芯軸在縱向力P作用下的變形和受力如圖3。
拉桿A端芯軸在力P作用下相對拉桿的縱向位移為Δx1,由拉桿轉動產生的附加位移為Δx2,拉桿B端相對B芯軸的縱向位移為ΔBx,拉桿C端相對C芯軸的縱向位移為ΔCx,拉桿D端相對構架的縱向位移為ΔDx。則A端關節芯軸相對于轉向架構架的縱向位移為Δx=Δx1+Δx2,在小變形情況下,Δx2≈ΔDx,φ為拉桿轉動的角度。
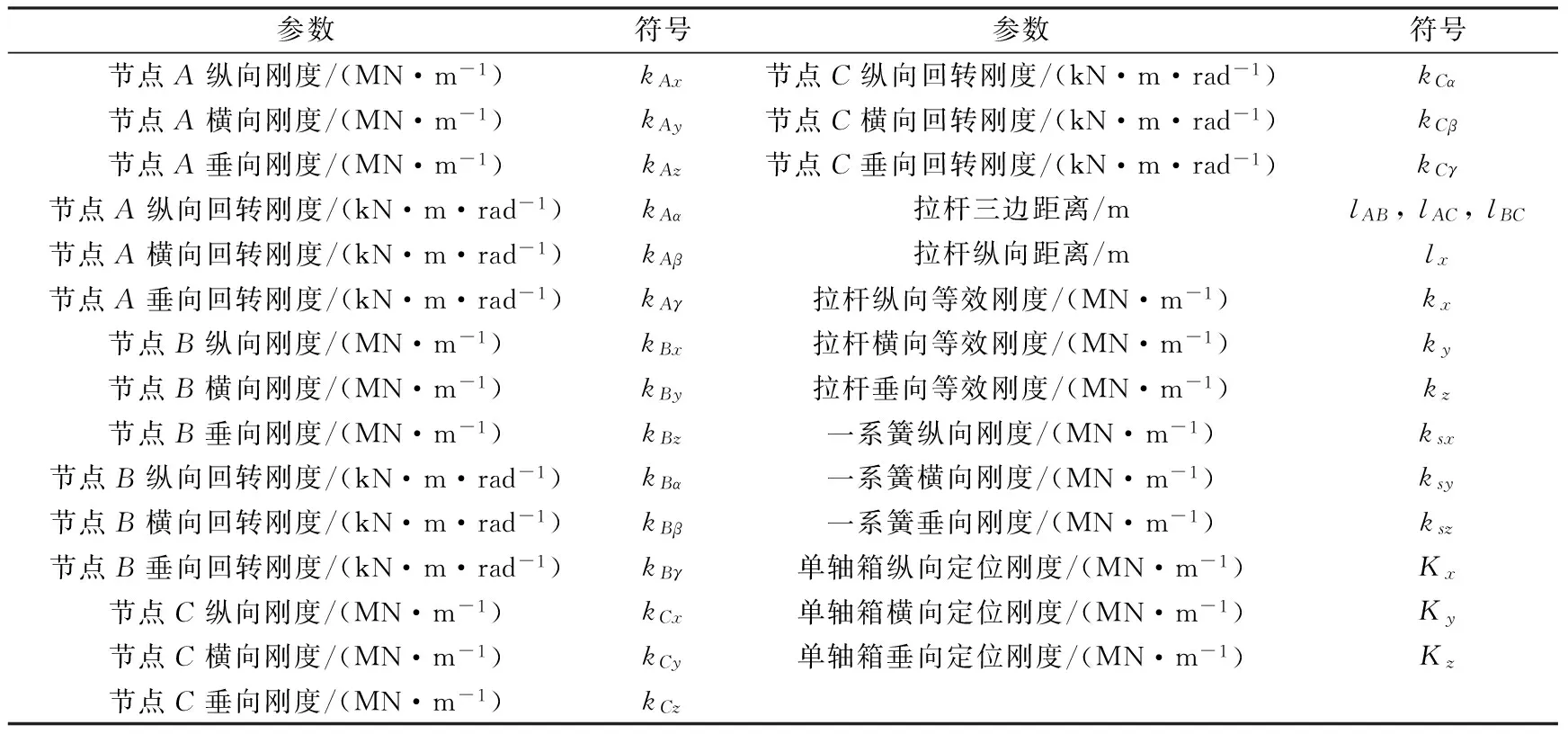
表1 拉桿節點參數符號
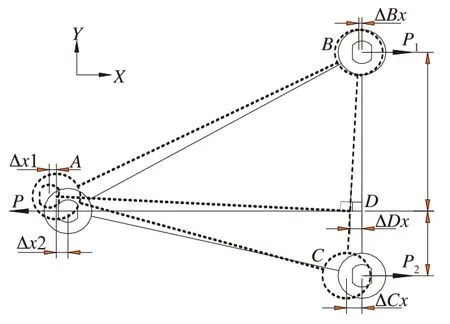
圖3 拉桿縱向受力和變形圖
根據拉桿的受力與幾何關系可得如下關系式:
(1)
由方程組(1)解得拉桿的縱向等效剛度:
(2)
當拉桿的∠ACB或∠ABC為鈍角時,拉桿節點A的芯軸在縱向力P作用下變形和受力如圖4,這里忽略節點偏轉剛度對拉桿縱向等效剛度的影響。
A端芯軸在力P的作用下相對拉桿的位移為Δx1,拉桿在力P的作用下,拉桿B端相對B芯軸的縱向位移為ΔBx,拉桿C端相對C芯軸的縱向位移為ΔCx,則拉桿上虛擬點D相對構架的縱向位移為ΔDx,A端關節芯軸相對于轉向架構架的縱向位移為Δx=Δx1+Δx2,在小變形情況下,Δx2≈ΔDx,r1為B點到轉心O的距離,r2為C點到轉心O的距離,φ為拉桿轉動的角度。

圖4 拉桿縱向受力和變形圖
根據拉桿的受力與幾何關系可得如下關系式:
(3)
由方程組(3)解得拉桿的縱向等效剛度:
(4)
為簡化縱向等效剛度計算結果,將上述兩種情況進行數學統一,得到拉桿的縱向等效剛度kx,忽略節點回轉剛度(由2.1的仿真研究表明,忽略節點回轉剛度對計算結果的誤差小于1%),可得:
(5)
其中:lBC=a+b,lBD=a,lCD=b,當三節點拉桿的∠ACB或∠ABC為鈍角時,b的取值為負。
1.2拉桿橫向等效剛度ky
拉桿A端芯軸在橫向力P的作用下的變形和受力分別如圖5和圖6。

圖5 拉桿橫向變形圖

圖6 拉桿橫向受力圖
如圖,拉桿在橫向力P作用下,A端芯軸相對構架的橫向位移Δy可看成A端芯軸相對拉桿的橫向位移Δy1,拉桿相對構架的橫向位移Δy2,和拉桿A點由拉桿回轉運動產生的附加橫向位移Δy33部分組成。設拉桿繞力平衡回轉中心O旋轉的角度為ψ,則Δy3=ψ·r1,由于轉動角 較小,r1≈lx。
由拉桿的力平衡和變形協調可得:
由方程組(6)解得拉桿的橫向等效剛度:
(7)
1.3拉桿垂向等效剛度kz
拉桿A端芯軸在垂向力P的作用下的變形和受力如圖7。

圖7 拉桿垂向受力及變形圖
拉桿A端芯軸相對構架的垂向位移Δz可看成A端芯軸相對拉桿的垂向位移Δz1,拉桿相對構架的垂向位移Δz2和拉桿A點因拉桿繞y軸的回轉運動而產生的附加垂向位移Δz33部分之和。設拉桿的回轉角為θ,則Δz3=lxθ,由拉桿的力平衡和變形協調可得:
(8)
由方程組(8)解得拉桿的垂向等效剛度
(9)
1.4三節點拉桿式軸箱定位剛度
軸箱定位剛度可看成拉桿的等效剛度與一系簧剛度并聯,因此可得軸箱的三向定位剛度計算公式。
(10)
2 拉桿等效剛度公式驗證
利用SIMPACK軟件[2]建立拉桿的計算模型,如圖8,由于與構架相連的兩個芯軸通過螺栓與構架剛性連接,因此這兩個芯軸不用單獨建模,這樣模型由拉桿以及與軸箱端連接的芯軸兩個剛體組成。拉桿具有6個自由度,芯軸只具有三向平動自由度,芯軸與拉桿之間用6自由度的力元相連接以模擬橡膠節點的各向剛度,與構架連接的兩個節點同樣用6自由度的力元來模擬。
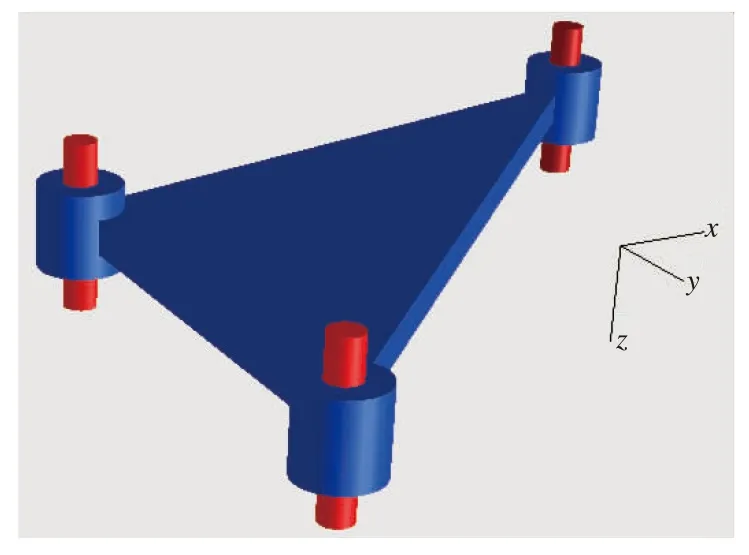
圖8 拉桿的力學模型
2.1理論計算與仿真結果比較
通過在芯軸上分別施加x、y、z向的外力得到芯軸對應的x、y、z向位移,從而得到拉桿x、y、z向的等效剛度。同時為了驗證不同結構尺寸拉桿的等效剛度計算公式,采用表2的6組拉桿參數來計算相應的拉桿等效剛度。

表2 拉桿計算參數
將仿真計算結果與理論公式(5),式(7),式(9)計算結果進行比較,得到仿真值與理論值的誤差百分比,進而可以驗證理論公式的正確性,如表3所示。

表3 公式計算值與仿真計算值對比
注:上述公式計算結果中,縱向剛度kx一欄,括號內為考慮節點繞z軸回轉剛度的計算值;橫向剛度ky一欄,括號內為考慮到節點繞z軸回轉剛度的計算值;垂向剛度kz一欄,括號內為考慮節點沿z軸的垂向剛度的計算值,計算的誤差百分比以非括號數據為準。
通過對表3中的數據進行分析,可得如下結論:
(1)拉桿的縱向等效剛度公式計算值與仿真值基本一致,當欄桿形狀為直角三角形時誤差較大,其他情況下誤差非常小;拉桿的縱向等效剛度受到拉桿的結構尺寸影響明顯,公式可以反映出拉桿結構尺寸的影響;節點的回轉剛度對拉桿縱向等效剛度影響非常小,誤差小于1%,可以將其忽略。
(2)拉桿的橫向等效剛度公式計算值與仿真值基本一致,誤差在3%以內;節點轉動剛度對拉桿的橫向等效剛度影響小于2%,可以將其忽略。
(3)拉桿的垂向等效剛度公式計算值與仿真值誤差小于3%,拉桿節點的垂向平移剛度對拉桿垂向等效剛度的影響小于3%,可以將其忽略;拉桿的形狀對拉桿垂向等效剛度沒有影響。
由上可將三節點拉桿的等效剛度計算理論公式進一步簡化為式(11)~式(13)。
拉桿縱向等效剛度kx(當∠ACB或∠ABC為鈍角時,b的取值為負數)
(11)
拉桿橫向等效剛度ky:
(12)
拉桿垂向等效剛度kz:
(13)
2.2拉桿幾何參數對其等效剛度的影響分析
該節主要研究以下3個方面,拉桿的計算參數取表2中第2組數據。
拉桿長度lx對拉桿橫向和垂向等效剛度的影響如圖9、圖10所示。

圖9 拉桿長度lx對拉桿橫向等效剛度的影響
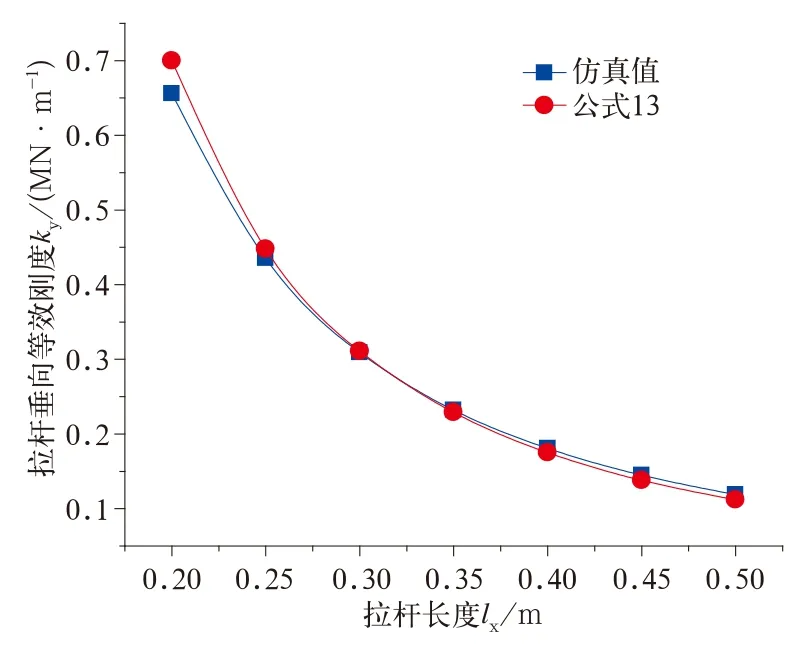
圖10 拉桿長度lx對拉桿垂向等效剛度的影響
不對稱影響因素b/a(a+b=lBC=0.3 m)對拉桿橫向和縱向等效剛度的影響如圖11、12所示,當b/a為正時,即∠CAB>90°,當b/a為負時,即∠ACB>90°,當b/a為零時,即∠ACB=90°。
當拉桿對稱時(a=b),拉桿BC邊長lBC對拉桿橫向等效剛度的影響如圖13所示。
由上可得:拉桿縱向長度lx對拉桿的橫向和垂向等效剛度影響明顯,當lx增加時,拉桿橫向和垂向等效剛度顯著減小;拉桿不對稱因素對拉桿的橫向、垂向等效剛度無影響,而對拉桿縱向等效剛度影響明顯,隨著不對稱因素的增加,拉桿縱向等效剛度先增大后減小,最后趨于平穩;當拉桿形狀為直角時,拉桿縱向等效剛度減小為對稱時的一半;拉桿的橫向等效剛度隨著拉桿橫向長度增加而呈線性增加。

圖11 拉桿不對稱影響因素b/a對拉桿橫向等效剛度的影響

圖12 不對稱影響因素b/a對縱向等效剛度的影響

圖13 拉桿BC邊長lBC對拉桿橫向等效剛度的影響
3 結 論
首先推導了三節點單拉桿的等效剛度的理論計算公式,并通過多體動力學軟件SIMPACK驗證了所得理論公式的正確性,最后對所得理論計算公式進行了工
程簡化,得到了滿足工程需求的簡化計算公式(11)、式(12)、式(13),進而為該類型的軸箱定位設計提供了理論指導。 同時得到如下結論:
(1)拉桿縱向長度lx對拉桿的橫向和垂向等效剛度影響明顯,當lx增加時,橫向和垂向等效剛度顯著減小。
(2)拉桿不對稱因素對三節點拉桿的橫、垂向等效剛度幾乎影響,而對拉桿縱向等效剛度影響明顯,隨著不對稱因素的增加,拉桿縱向等效剛度先增大后減小,最后趨于平穩;當拉桿形狀為直角時,拉桿縱向等效剛度減小為對稱時的一半。
(3)拉桿的橫向等效剛度隨著拉桿橫向長度的增加而近似呈線性增加。
[1]王安國,呂成吉,王靖.CRH5A型動車組轉向架一系雙拉桿定位剛度及性能影響[J].大連交通大學學報,2013,34(5):33-36.
[2]繆炳榮,方向華,傅秀通.SIMPACK動力學分析基礎教程[M].成都;西南交通大學出版社,2008.
Study on Positioning Stiffness of Three-node Pull-rod Axle-box
ZHANGJiang1,LIUGaokun2,LIUQiang3
(1Knorr Equipment (Suzhou) Co., Ltd., Suzhou 215011 Jiangsu, China;2China Railway Fourth Survey and Design Institute Group Co., Ltd., Wuhan 430063 Hubei, China;3State Key Laboratory of Traction Power, Southwest Jiao Tong University, Chengdu 610031 Sichuan, China)
This paper deduces the theoretical calculation formula of positioning stiffness of three-node single pull-rod axle-box at first. Then established the physical model of three-node simplex pull rod, and the correctness of the theoretical formula is verified by this model, and the influence factors of rod equivalent stiffness are discussed simultaneously. It turned out that: The theoretical calculation formula of positioning stiffness of three-node single pull-rod axle-box can reflect the real situation, the deviation of the lateral, longitudinal and vertical equivalent stiffness of the rod were within 10%; the longitudinal length of the rod made a big difference to lateral and vertical equivalent stiffness, and as the length increased, lateral and vertical equivalent stiffness was significantly reduced; Asymmetry factors on the lateral, vertical equivalent stiffness of the pull rod had no effect on lateral and vertical equivalent stiffness, but having significant impact on longitudinal equivalent stiffness, moreover the longitudinal equivalent stiffness increased firstly and then decreased ,at last it leveling out during the increasing of asymmetry factors; the lateral equivalent stiffness increased linear with the increase of rod lateral length approximately.
three-node rod; axle-box positioning stiffness; pull-rod equivalent stiffness
1008-7842 (2016) 03-0011-05
男,工程師(
2015-12-20)
U260.331+.7
Adoi:10.3969/j.issn.1008-7842.2016.03.03
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
媽媽寶寶(2017年3期)2017-02-21 01:22:28
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
