HXD3C型電力機車自主化控制與監視系統(TCMS)研究與實現
2016-10-25 09:02:43李新,李哲
鐵道機車車輛 2016年3期
李 新, 李 哲
(中車大連機車車輛有限公司, 遼寧大連 116022)
?
HXD3C型電力機車自主化控制與監視系統(TCMS)研究與實現
李新, 李哲
(中車大連機車車輛有限公司, 遼寧大連 116022)
為了實現HXD3C型電力機車控制與監視系統的硬件和軟件的自主化,掌握電力機車產品的核心技術,同時提高電力機車產品的核心競爭力,提出了HXD3C型電力機車控制與監視系統完全自主化的解決方案。確定機車控制與監視系統的自主研發原則,選定PowerPC X86系列及QNX操作系統的硬件和軟件體系,使用C語言進行代碼編寫,實現硬件到軟件完全自主化。通過在沈局HXD3C機車的裝車試驗和線路試驗,整套系統工作正常,達到預期目的,完成了技術轉讓—消化吸收—自主創新的目標。
HXD3C型電力機車; 自主化; 控制與監視系統; 硬件結構; 軟件結構
HXD3C型機車是在六軸大功率交流傳動電力機車技術平臺的基礎上衍生出的具有列車供電功能的交流傳動快速客運電力機車。目前主要在全國鐵路局擔當客運主力牽引任務。HXD3C型電力機車繼承了HXD3系列電力機車的技術體系,具有牽引力大、黏著性能好、恒定功率速度范圍寬、效率高、運行速度快等特點。
該型機車的控制與監視系統(以下簡稱TCMS)從日本東芝公司技術引進,并經過技術轉讓在國內生產,但TCMS的核心技術一直被國外壟斷,近期,隨著車型和數量的不斷增加,TCMS已經表現服務響應慢,改善效果不佳的狀態,影響機車質量的快速提升。為了打破國外機車生產商的技術壁壘,完全掌握機車的TCMS,提出了以HXD3C電力機車為起點,自主研發電力機車TCMS,并不斷深入研究其相關技術的目標。
1 自主研發原則和開發路線
1.1開發原則
遵循成熟性、繼承性、自主性、可靠性、經濟性總體原則,TCMS需要結合國際最新一代網絡控制系統的相關技術,實現從硬件到軟件的完全自主化設計,獨立編寫軟件代碼,達到整體替代的目標。同時考慮到TCMS需要具有可繼承性和可移植性,以便將來推廣應用到其他車型。
1.2開發路線
首先根據實際應用需求確定HXD3C型電力機車TCMS的硬件系統配置,需要具有可靠性、處理速度快、存儲容量大等特點。為了實現對現行機車部件級替換,要保證產品的接口與既有產品完全相同。為了微機系統內部通信和其與機車設備之間的通信,添加了CAN通信板卡、HDLC通信板卡和以太網板卡。為了采集機車硬線數據,添加了數據傳輸模塊。
然后根據機車實際運行情況,制定軟件控制規范,編寫應用層軟件,軟件系統需要具有可移植性、開發方便、應用廣泛等特點,同時搭建仿真試驗平臺,實現試驗室級的仿真調試。仿真平臺相當于整車控制系統的集成,它主要由機車的控制與監視系統、工控機、電源模塊、信號發生器、指示燈顯示單元及顯示屏等硬件組成。仿真試驗平臺采用全自動信號反饋和手動信號反饋兩種形式,可以通過仿真試驗平臺模擬機車實際控制可能發生的各種工況。
最后進行裝車試驗。驗證硬件系統,不斷完善軟件系統,提高產品質量,完成技術轉讓-消化吸收-自主創新的總體目標。
2 硬件系統配置
2.1接口需求
對HXD3C機車TCMS接口進行統計,確定以下接口需求指標:
接口數量、種類和功能:
①以太網:4路機車外重聯;
②RS485(HDLC):12路車內TCMS和部件級通訊;
③數字輸入:144路,DC 110 V設備狀態采集;
④數字輸出:70路設備控制;
⑤模擬輸入:6路,4~20 mA /±10 V模擬量采集;
⑥頻率量輸入:6路,0~15 V,0~24 V頻率量采集;
2.2硬件體系框圖(見圖1)
為實現接口需求,硬件系統至少應該包括以下幾個部分:
(1) 因為CPCI總線接口標準,具有良好的可插拔性、高開放性、高可靠性、抗振性和通風性,所以TCMS采用CPCI總線接口標準進行通訊板卡和總控制板卡之間的通訊。總控制板卡和通訊板卡插到CPCI插槽上,通過CPCI總線傳輸信息。通訊板卡把接收到的機車實時信息通過CPCI總線傳輸到總控制板卡上,再把總控制板卡上發布的命令傳輸到各通訊板卡上。
(2) 因為CAN控制局域網絡,采用國際標準化的串口通信協議,是一種有效支持分布式控制或實時控制的串行通信網絡。所以TCMS的內部板卡級通信網絡采用CAN總線傳輸,實時傳輸機車硬線信息。
(3) 因為HDLC高級數據鏈路控制是一種面向比特的數據鏈路鏈路層。無論是數據還是單獨的控制信息,均以幀單位傳輸,傳輸快捷、準確。所以TCMS與機車外部設備通信采用HDLC總線傳輸,實時傳輸機車設備信息。
(4) 因為標準以太網使用CSMA/CD(載波監聽多路訪問及沖突檢測)技術,以10 Mbit/s的速率運行多種類型的電纜上,具有傳輸速率快、傳輸距離遠的特點,所以機車外重聯的通信距離較遠,所以外重聯通信采用以太網板卡通信,傳輸重聯機車總控制板卡的信息。
(5) 總控制板卡是TCMS的處理部分和邏輯運算部分,負責將采集到的信息處理,輸出運算結果。總控制板卡的CPU的頻率為1 GHz,內存為512 M,硬盤為2 G,硬件配置高、處理速度快,同時內設外部接口,可以接收和傳遞以太網板卡、CAN板卡和HDLC板卡的信息。
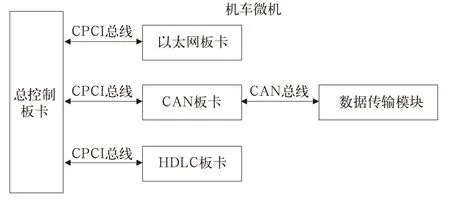
圖1 硬件體系框圖
硬件板卡從阿爾斯通技術引進,經消化吸收,已完全可以實現板卡的自主化,獨立編寫板卡的底層驅動程序,板卡間的通訊程序,板卡的自檢程序,為TCMS的自主化提供了堅實的基礎。
板卡之間的聯接關系如圖2所示,總控制板卡負責接收機車實時信息,并進行邏輯分析判斷和輸出判斷結果,整個接收和發送信息過程通過CPCI總線協議實現; CAN板卡負責通過CAN總線發送和接收通過CAN串口通信協議傳輸的數據,并且將傳輸的數據進行解析;數據傳輸模塊負責接收機車當前的模擬量信息、數字量信息和頻率量信息,并且通過CAN總線發送給CAN板卡。HDLC板卡負責與機車設備之間通過HDLC串口通信高級數據鏈路協議或RS422通信協議進行通信,同時負責根據HDLC串口通信高級數據鏈路協議將機車數據解析并且傳遞。以太網板卡負責機車外重聯之間的通信,將重聯機車的信息傳遞到本務機車TCMS的總控制板卡。
2.3產品構成
TCMS由背板、托架和內箱組成。背板用于與機車電氣系統連接;托架用于機械結構定位和支撐單內箱;內箱為主控單元MCC。主控單元的工作電壓為DC 110 V,最大功率小于500 W。
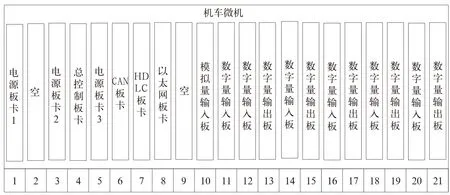
圖2 板卡連接關系
主控單元采用3U21機箱結構,由19塊電路板插件模塊、母板及箱體結構件組成,各電路板為3U標準結構(100 mm×220 mm)。MCC中的母板是總線集成板,包括4個CPCI插槽、3個電源插槽、12個I/O插槽。
其中:1號和4號插槽的電源板卡為機車微機供電;5號插槽的電源板卡為機車外部提供24V電源;4號插槽的總控制板卡控制整車運行;6號、7號、8號插槽為通信板卡,負責為總控制板卡傳輸信息;其余板卡負責數字量、模擬量、和頻率量的輸入和輸出。
3 軟件系統
3.1軟件開發平臺
因為QNX提供進程調度、進程間通信、底層網絡通信和中斷處理,提供了標準進程調度,同時規定了255個進程優先級,是目前廣泛采用的軟件開發平臺。所以TCMS的應用層軟件的底層開發平臺采用QNX。應用層軟件可以根據實際機車功能需求,將不同的功能代碼分配到不同的優先級中,實時性高的功能代碼分配的相對優先級高的代碼中,如:升弓控制、主斷路器控制等;實時性低的功能代碼分配的相對優先級低的代碼中,如:顯示屏數據顯示,實時數據記錄等。同時進程間可以進行通信傳遞信息,可以根據中斷處理,確保優先級高的進程可以實時處理。
3.2軟件邏輯結構(見圖3)
根據實際機車運行需求,以及便于團隊合作開發的執行。將整個執行軟件編寫部分分成11個小部分,首先是輸入設備檢測和運行控制部分,獲取機車當前實時信息,包括機車硬線信息、機車設備信息和司機的實時操作信息;然后是機車設備控制,TCMS根據不同設備的保護邏輯和控制邏輯進行設備控制;接著是工況控制、工況選擇、維護模式、通訊總線控制、速度控制、輸出信號控制、接觸器邏輯判斷進行控制,TCMS根據實時機車信息選擇進入不同的工況模式,對機車設備,接觸器狀態和運行情況等進行實時邏輯控制;最后是故障邏輯診斷,實時報出機車故障信息,司機可以根據故障類型采取不同的操作。

圖3 軟件邏輯結構
4 裝車試驗
4.1裝車方案
原TCMS的裝車方案如圖4所示,接口CN7-CN10不是直接接入機車配線,而是通過INF1和INF2連入機車配線。INF1和INF2的作用是電平轉換,將內箱110 V電壓轉換為24 V電壓,然后再連入機車配線。
自主化TCMS內部增加電源板卡3,電源板卡3的作用是將110 V轉換為24 V,所以接口不需要通過INF1和INF2,可以直接接入機車配線。
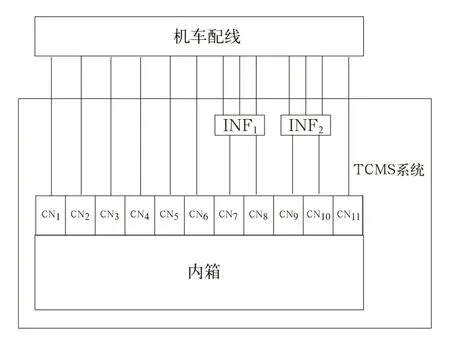
圖4 原TCMS裝車方案

圖5 自主化TCMS裝車方案
4.2軟件試驗情況
采用QNX的軟件開發平臺。QNX是一種分布式、嵌入可規模擴展的實時操作系統。由于其核心內核非常小,而且運行速度非常快,所以可以根據實際需要進行裁剪,裁剪之后的也非常小,減少對主控制板卡硬件的需求。
首先進行了庫內靜態調試,主要包括TCMS和機車各部件之間的通信狀態,TCMS的各類開關輸入指令DI的確認,操縱臺鑰匙開關的連鎖控制各類標志燈、輻照燈等的控制。
然后通過主回路庫用電源為機車提供600 V直流電源,進行庫內牽引試驗,查看牽引力和牽引力矩的數值是否正確,接著進行靜態動車試驗,查看機車通信是否正常,輸出的實際牽引力和牽引力矩是否正確。
最后是在高壓網下完成高壓試驗,受電弓試驗、主斷保護試驗、高壓隔離開關試驗,接著讓機車在線路上運行,查看機車實際運行狀態。
4.3線路考核
2015年下半年HXD3C型電力機車的自主化TCMS在沈陽鐵路局進行了實際線路運用考核,重點進行了過分相試驗和定速試驗,機車TCMS與機車各部件通信正常,機車整體運行平穩,圓滿的完成了自主化的任務目標。
5 調試經驗
5.1定速穩定性
HXD3C型電力機車具有定速功能,即司機在機車任意行駛工況下,可以通過點擊定速按鈕實現機車恒定速度運行。由于運行線路環境復雜,部分路段會出現連續起伏,因此對定速控制功能的穩定性要求很高。
原始設計的TCMS定速控制模型加入了比例環節,對速度偏差能夠即時反應,偏差一旦出現,調節器立即采取對應調節,調節作用的強弱取決于比例系數的大小,系數越大,調節速度越快但容易產生殘余穩態誤差。加大比例系數可以減小穩態誤差,但過大會使系統的動態質量變壞,引起輸出力震蕩,系統不穩定。因此在機車模擬實際線路運行的過程中多次發生了控制精度欠佳的情況。
基于此對原始的定速控制模型進行優化,采用PI調節同時加入積分環節,以便消除比例環節中的殘余穩態誤差。整個定速控制模型具有累積成分,只要偏差不為零,將通過累積作用影響輸出力,從而減小偏差,直至偏差為0。
定速狀態下牽引制動力計算:定速控制根據定速狀態觸發的設定速度與實際機車速度的偏差,采用PI閉環調節進行控制。其輸入量為速度偏差E,輸出量為牽引或制動力F,通過牽引或制動力的變化改變速度值的大小從而形成閉環控制。調節依據為牽引或制動力輸出的波動性和響應速度。將增量式PI公式離散化得到如下公式:
其中;ΔFn為第n次的力增量,KP為比例系數,En為第n次的速度差,En-1為第n-1次的速度差,Ki為積分系數。
5.2定速極值計算
當速度偏差始終大于或小于0時,牽引或制動力根據速度偏差值產生相應變化。如果不對力矩的限界進行約束,可能會超過變流器最大輸出力矩,報出過流、過壓或者門級電路等故障,甚至對變流器產生損傷。
原始設計的TCMS力矩極值模型將牽引力力矩和制動力力矩的最大級位全部設定為12級,在線路模擬試驗中發生了在牽引力最大級位的情況下,牽引力無法到達最大值的情況;在制動力最大級位的情況下,電制力可以到達最大值。
基于此對TCMS的力矩極值模型進行修改,修改牽引特性曲線,牽引特性曲線的最大值改為13級,當在12級時,牽引力矩可以達到最大值,在其他級位時,級位對應的牽引力矩值保持不變。同時對定速工況下牽引制動力的調節極限進行計算,具體情況分為以下4類:
當在牽引狀態下實施定速且實際速度始終大于設定速度,則牽引力矩值先減小至0并轉換為電制力矩值繼續增大,其增大極值為該設定速度及電制工況下,最大級位12時的力矩值(即極值位于最大級位時對應的電制特性曲線力矩值)。
當在牽引狀態下實施定速且實際速度始終小于設定速度,則牽引力矩值始終增大,其增大極值為該設定速度及牽引狀態下,最大級位13時的力矩值(即極值位于最大級位時對應的牽引特性曲線力矩值)。
當在電制狀態下實施定速且實際速度始終大于設定速度,則電制力矩值始終增大,其增大極值為該設定速度及電制狀態下,最大級位12時的力矩值(即極值位于最大級位時對應的電制特性曲線力矩值)。
當在電制狀態下實施定速且實際速度始終小于設定速度,則電制力矩值先減小至0,然后轉換為牽引狀態繼續增大,其增大極值為該設定速度及牽引工況下,最大級位13時的力矩值(即極值位于最大級位時對應的牽引特性曲線力矩值)。
在4種狀態下,當速度偏差為0時,牽引力矩值或制動力矩值保持不變。
5.3與顯示屏數據通信
HXD3C機車將采用自主化的TCMS與原裝的機車顯示屏通信,因此需要解析TCMS與顯示屏之間的數據流,以便完成TCMS與顯示屏的數據交互。顯示屏處理器沒有邏輯運算功能,也沒有信息存儲功能,每個顯示界面內不同圖標的顯示狀態全部與內部存儲結構SR、SM寄存器一一對應。顯示屏顯示的界面數多,每個界面顯示的圖標數多,因此需要解析的數據量大。
制作數據收發儀模擬TCMS同顯示屏通信,由于TCMS與顯示屏的通訊方式采用硬線RS485,所以數據收發儀通過RS485連接機車顯示屏,通過發送不同的數據值查看顯示屏界面不同圖標的顯示狀態變化,觸發顯示屏不同的按鍵,查看接收顯示屏數據的變化,并記錄發送和接收的數據信息,最終解析出顯示屏與TCMS的整個數據流。
5.4經驗總結
自主化TCMS的應用考核非常成功,首次考核完成了全部試驗項目,機車進行了上線運用試驗,機車運行狀態平穩。應用考核的成功依賴于軟件在HXD3C試驗平臺的反復調試。HXD3C試驗平臺模擬了所有機車設備,在試驗平臺上,可以通過硬線開關模擬機車所有硬線信號,通過模擬軟件模擬所有機車設備發送的數據流信息,模擬了機車可能遇到的各種工況,對自主化TCMS提供了堅實的基礎。
6 結束語
針對控制與監視系統自主化的要求,從硬件系統和軟件系統兩個角度考慮控制與監視系統所需要達到的要求,再考慮需要同時可以對已經上線機車進行部件級替換的要求。提出了同原硬件接口、硬件尺寸等做到相同的標準,采用原機車通信協議,模擬仿真機車實際運行情況編寫軟件的總體解決思路。
2015年HXD3C型電力機車自主化控制與監視系統在沈陽鐵路局897號HXD3C型電力機車上進行了載客運用考核,取得了圓滿成功,自主化控制與監視系統可以實現整車的邏輯控制,為后期HXD3D型電力機車控制與監視系統的自主化和后續其他電力機車控制與監視系統的自主化提供了堅實的理論和實踐基礎。
[1]李哲, 李新, 趙鑫, 等. HXD3D型電力機車冬季寒冷地區升弓技術的研究與實現[J]. 鐵道機車車輛,2015, 35(2):87-89.
[2]王偉群, 楊偉君, 王鵬飛. 動車組升弓控制系統[J]. 鐵道機車車輛,2011, 31(5):115-117.
[3]謝春華. 對韶山系電力機車操縱控制電路的改進建議[J]. 鐵道機車車輛,2010, 30(2):88-89.
[4]李新, 謝陳剛. HXD3C型電力機車輔助變流器水冷卻技術的研究與實現[J]. 鐵道機車車輛,2012, 32(3):57-59.
[5]于萬聚. 高速電氣化鐵路接觸網 M]. 成都: 西南交通大學出版社, 2003.
[6]杜建波. HXD3C型機車受電弓故障的查找和原因分析[J]. 鐵道機車車輛,2013, 33(4):113-116.
Research and Realization of TCMS Localization Development on HXD3C Type Electric Locomotive
LIXin,LIZhe
(CRRC Dalian Co.,Ltd.,Dalian 116022 Liaoning, China)
In order to achieve localization development of the HXD3C type electric locomotive control and monitoring system include related hardware and software, furthermore master core technology products of electric locomotive, improve the core competitiveness of electric locomotive products at the same time, puts forward solutions to local develop the HXD3C type electric locomotive control and monitoring system completely. Determine the locomotive control and monitoring system of the principle of independent research and development, selected PowerPC X86 series and QNX operating system, related hardware and software of the system for writing code, using C language to realize development locally completely from hardware to software. Through HXD3C locomotive loading test and line test in Shenyang Bureau, the system working properly, achieved the desired purpose, completed the transfer of technology, digestion, absorption, distribution, the goals of the independent innovation.
HXD3C type electric locomotive; development; TCMS; hardware; software
1008-7842 (2016) 03-0028-06
男,高級工程師(
2016-01-13)
U264.91+1
Adoi:10.3969/j.issn.1008-7842.2016.03.06
