陣列式高頻地波雷達矢量流長周期適用性比測試驗數據分析
2016-10-25 05:34:42徐全軍魏國妹商少平賀志剛雷發美
海洋技術學報 2016年1期
徐全軍,魏國妹,商少平,4,賀志剛,4*,戴 昊,雷發美,劉 軻
(1.中國人民解放軍海洋環境專項辦公室,北京 100081;2.廈門大學 水聲通信與海洋信息技術教育部重點實驗室,福建 廈門 361005;3.廈門大學 海洋觀測技術研發中心,福建 廈門 361005;4.廈門大學 海洋與地球學院,福建 廈門 361102)
陣列式高頻地波雷達矢量流長周期適用性比測試驗數據分析
徐全軍1,魏國妹2,3,商少平2,3,4,賀志剛2,3,4*,戴昊2,3,雷發美2,3,劉軻2,3
(1.中國人民解放軍海洋環境專項辦公室,北京 100081;2.廈門大學 水聲通信與海洋信息技術教育部重點實驗室,福建廈門 361005;3.廈門大學 海洋觀測技術研發中心,福建廈門 361005;4.廈門大學 海洋與地球學院,福建廈門361102)
基于高頻地波雷達長周期適用性比測試驗數據,主要從以下3個方面系統分析國產陣列式高頻地波雷達矢量流控測效果:(1)時間有效采樣率和覆蓋率的空間分布;(2)與反演的流速匹配的現場觀測深度;(3)不同區域的探測精度。長周期的海流驗證表明,雷達海流可以有效地反映有效探測區內表層海流及其時空變化,高精度區流速流向的均方根誤差(RMS)分別為7.5~19.3 cm/s和15.5°~33.7°,尤其是高精度區核心區域的RMS僅為7.5~10.1 cm/s和15.5°~28.5°。邊緣區流速流向的RMS為16.1~25.8 cm/s和39.5°~40.7°,與國內外達到業務化運行要求的同類產品實際觀測精度相當。
高頻地波雷達;長周期試驗;海洋表層流;海流探測深度
高頻地波雷達,又稱高頻海面波雷達,工作于高頻(3~30 MHz)頻段,利用垂直極化高頻電磁波沿海面(地表面)繞射傳播特性,能夠探測到視距以外的目標。1955年,Crombie用Bragg諧振散射解釋了高頻無線電波與海洋表面的相互作用[1]。1972年,Barrick進一步對高頻電磁波與海面作用產生的一階散射和二階散射作了理論上的定量解釋,為高頻地波雷達探測海洋表面流、海面風場和浪場等海洋環境信息建立了理論基礎[2]。此后,高頻地波雷達在大面積、全天候探測海洋表面動力學要素方面得到廣泛的應用和發展。
為了驗證高頻地波雷達系統在海態監測方面的實用性能,國內外不少學者開展了海態要素的比測試驗[3],比測試驗的方法主要有兩種:一是選擇一型較為成熟的高頻地波雷達作為參考雷達,將參試雷達和參考雷達的海態結果做對比[4-5];二是在海上布放定點或移動式觀測設備,將參試雷達的觀測結果和海上設備的觀測結果做對比[6-10]。由于海上布點觀測方式的多樣化,布設站點的選擇更為靈活,海上觀測儀器的精度更高等,第二種比測方式目前使用得更為普遍。
雖然國內外已有不少的學者對各型高頻地波雷達海流探測的實用性能進行研究[11-14],但對比驗證的時間偏短,海上不同雷達探測區同步觀測的對比站點偏少,且專門針對雷達海流最佳探測深度的報道較少[15]。為了更好地了解雷達系統探測海流的綜合性能,于2013年1月到3月在臺灣海峽西南部海域,組織了為期45 d的高頻地波雷達適用性比測試驗。本文主要從以下3個方面對雷達測流結果進行系統地分析:(1)雷達海流探測的時間有效采樣率和覆蓋率的空間分布;(2)雷達反演矢量流的最佳深度;(3)不同區域雷達矢量流探測的精度。
1 雷達系統及試驗方案
參試的是國產陣列式高頻地波雷達,工作頻率約7.8 MHz(相應波長為38.5 m),有效探測距離10~200 km,波束覆蓋扇角120°,徑向角度和距離分辨率分別為1.5°和5 km。
試驗海區位于臺灣海峽西南部海域,陣列式高頻地波雷達部署在福建龍海、東山兩地(圖中簡寫為LOHI、DOSA),海上浮標按雷達探測的高精度區和邊緣區進行布設(圖1),藍色和黃色分別為雷達測流高精度區和最大探測區域,A,B,D和E站位于高精度區(A和D站位于核心區域),其中,B,E站浮標工作一段時間后移到B1,E1站對邊緣區進行觀測。雷達合成矢量流的高精度區為兩雷達站徑向流高精度區重疊部分,徑向流的高精度區范圍為距地波雷達站10%~60%最大探測距離、地波雷達站探測方位中心線±45°內。
目前普遍采用聲學多普勒流速剖面儀(簡稱ADCP)進行海流的觀測,ADCP淺海長期測流方式基本上有3種:坐底式觀測、懸浮式觀測和浮標觀測[16]。綜合考慮觀測方式的安全性和觀測結果的可靠性,本試驗的海上定點觀測均采用3 m浮標懸掛ADCP方式測流。Stewart和Joy[17]從理論上推導出雷達觀測海流的理論積分深度為(λ為雷達電磁波的波長),為了更好地滿足雷達海流檢驗的需要,選擇挪威Nortek工作頻率為1 000 kHz的ADCP測流,層厚設為0.5 m,共20層,第一層深度為1.5 m,采樣間隔5 min。
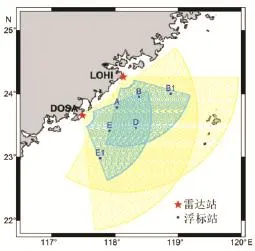
圖1 高頻地波雷達和浮標布放站位
2 分析方法
2.1雷達系統運行情況
(1)雷達系統時間有效采樣率。時間有效采樣率可用于說明雷達工作的連續性,其定義如下:時間有效采樣率=統計期間實際采樣場次/統計期間理論采樣場次。
雷達連續工作是其穩定運行的重要保證,實際得到的采樣場次越接近于理論采樣場次,則說明雷達的連續工作能力越強。
(2)雷達系統采樣率的空間分布。引入雷達元采樣率(或合成格點采樣率)的概念,用以評估雷達的觀測能力,確定雷達的有效觀測距離。由于矢量流是龍海和東山兩個單站探測的徑向流合成得到,其采樣率為中心站合成格點的采樣率,定義如下:中心站合成格點(或雷達元)采樣率=統計期間網格點(或雷達元)樣本數/統計期間實際采樣場次。
探測距離的定義如下:單站的探測距離=雷達元到雷達站的距離。
2.2雷達和海上定點觀測數據的對比方法
浮標ADCP觀測的海流數據采樣頻率為5 min,數據時間點為整點起逢尾數為0 min,5 min的時刻,如0:00,0:05,0:10等。高頻地波雷達的海流觀測數據采樣頻率為10 min,數據時間點為整點起尾數逢0 min的時刻,如0:00,0:10,0:20等。為了保證浮標和雷達的采樣時間段盡量重合,將雷達每組數據觀測時間段內的2組浮標海流數據做矢量平均,然后與雷達測流數據做對比分析和誤差統計等。
為分析高頻地波雷達海流數據精度,以浮標海流數據為基準,計算同時段雷達觀測結果的平均誤差(θ)、平均絕對誤差(Δm)、均方根誤差(RMS)、相關系數和復相關系數。由于合成海流是一個矢量,因此采用復相關系數來分析浮標測得的海流與高頻地波雷達測得的合成矢量流的相關性[18],其表達式如下:

式中:尖括號〈〉表示時間平均;u1,v1為浮標海流的東分量和北分量;u2,v2為雷達矢量流的東分量和北分量;復數ρ的模(小于1)表示雷達和浮標數據整體的相關性。
3 結果與討論
3.1雷達運行情況
3.1.1運行可靠性除去客觀因素,如斷電、雷電天氣等因素造成的采樣場次缺失,高頻地波雷達探測流場的時間有效采樣率東山站為97.3%,龍海站為93.8%,合成站為92.6%,采樣率最低。總體上雷達系統能穩定運行。
3.1.2探測覆蓋范圍高頻地波雷達徑向流采樣率的空間分布及不同探測距離上的平均覆蓋率如圖2,圖中灰色和黑色同心半圓分別表示距離雷達站100 km和200 km,粉紅色、天藍色、綠色和黃色分別表示采樣覆蓋率為90%,80%,60%和40%以上的區域。雷達元采樣率的空間分布呈現以雷達接收天線和發射天線法向方向的角平分線為軸的近似橢圓分布,離雷達站同一距離的雷達元,靠近雷達法向方向的采樣覆蓋率高于雷達扇區邊緣的區域;在雷達的波束覆蓋范圍內(120°),平均覆蓋率隨距離的增大而減小,115 km以內,雷達的覆蓋率可以達到90%,135 km以內80%,155 km以內60%。
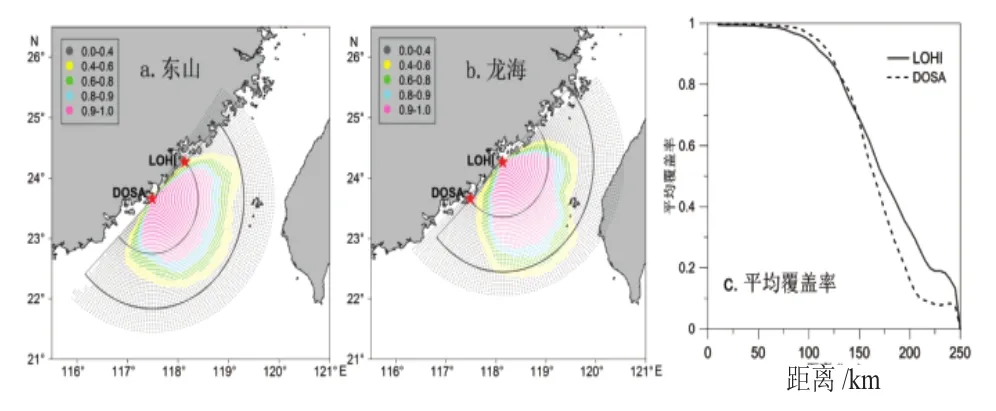
圖2 高頻地波雷達探測徑向流采樣率的空間分布及不同距離上的平均覆蓋率
高頻地波雷達合成矢量流采樣率的空間分布如圖3,采樣覆蓋率隨著距離的增大逐漸降低,等值線的分布大致呈近似橢圓形,除了兩臺雷達連線附近的采樣率較低外,在兩臺雷達探測視角的共同覆蓋海區的采樣率較高,往兩側采樣率逐漸降低。可能受龍海站西南側障礙物的影響,東山站附近的采樣覆蓋率較低。浮標布設站位的采樣覆蓋率均在80%以上,A,B,D和E站的采樣覆蓋率在99%以上。
3.2雷達探測海流的深度
高頻地波雷達是通過海洋表面對高頻電磁波的一階散射機制,從雷達回波中提取流場信息,所提取的流場按其原理應是近海面一定厚度水體在觀測時段里的平均速度,根據積分中值定理,若將該厚度的水體分為多層,必定存在某一層的速度最接近該厚度水體的平均速度,而實際應用中一般也認為高頻地波雷達提取的流場代表水下近表層某一層的海流。
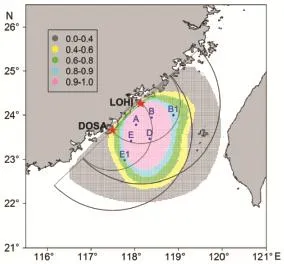
圖3 高頻地波雷達探測矢量流采樣率的空間分布(同心半圓同圖2)
考慮到海流是一個矢量,采用復相關系數(式1)來分析高頻地波雷達測量海流與不同深度浮標海流的相關性,將復相關系數最高的那一層海流確定為雷達測流的比測代表層。
由于各浮標與雷達站的相對位置不同,計算得到的復相關系數也有明顯差別。D,A浮標位于高頻地波雷達測流高精度中心區,B,E浮標位于兩個雷達站測流高精度區的邊緣,對B1,E1浮標而言,各有一個雷達站已處于測流的邊緣區(超過70%最大探測距離)。因此,以D,A浮標處相關性分析結果來判定高頻地波雷達測流的代表層更為合理。
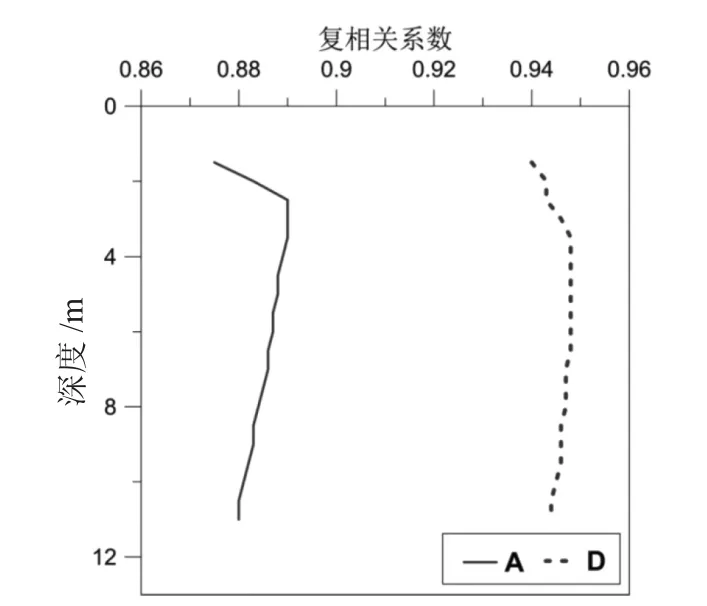
圖4 高頻地波雷達與A、D浮標不同層海流之間的復相關系數
根據圖4,近表層中,雷達與A,D浮標不同層海流之間的復相關系數分別為0.875~0.89和0.94~0.95,同一站位各層之間復相關系數比較接近,說明該區域表層的海流較為均勻。復相關系數隨深度變深先增大后減小,在1~20層的海流中,D浮標第5~11層的相關性略高于其他層次,A浮標第3~5層的相關性略優于其他層次,綜合兩浮標的結果,選擇第5層,即3.5 m層浮標海流為高頻地波雷達的比對代表層,該深度和理論積分深度[17]較為接近。
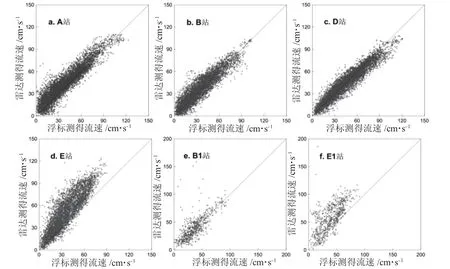
圖5 雷達合成流速與浮標代表層流速相關性散點圖
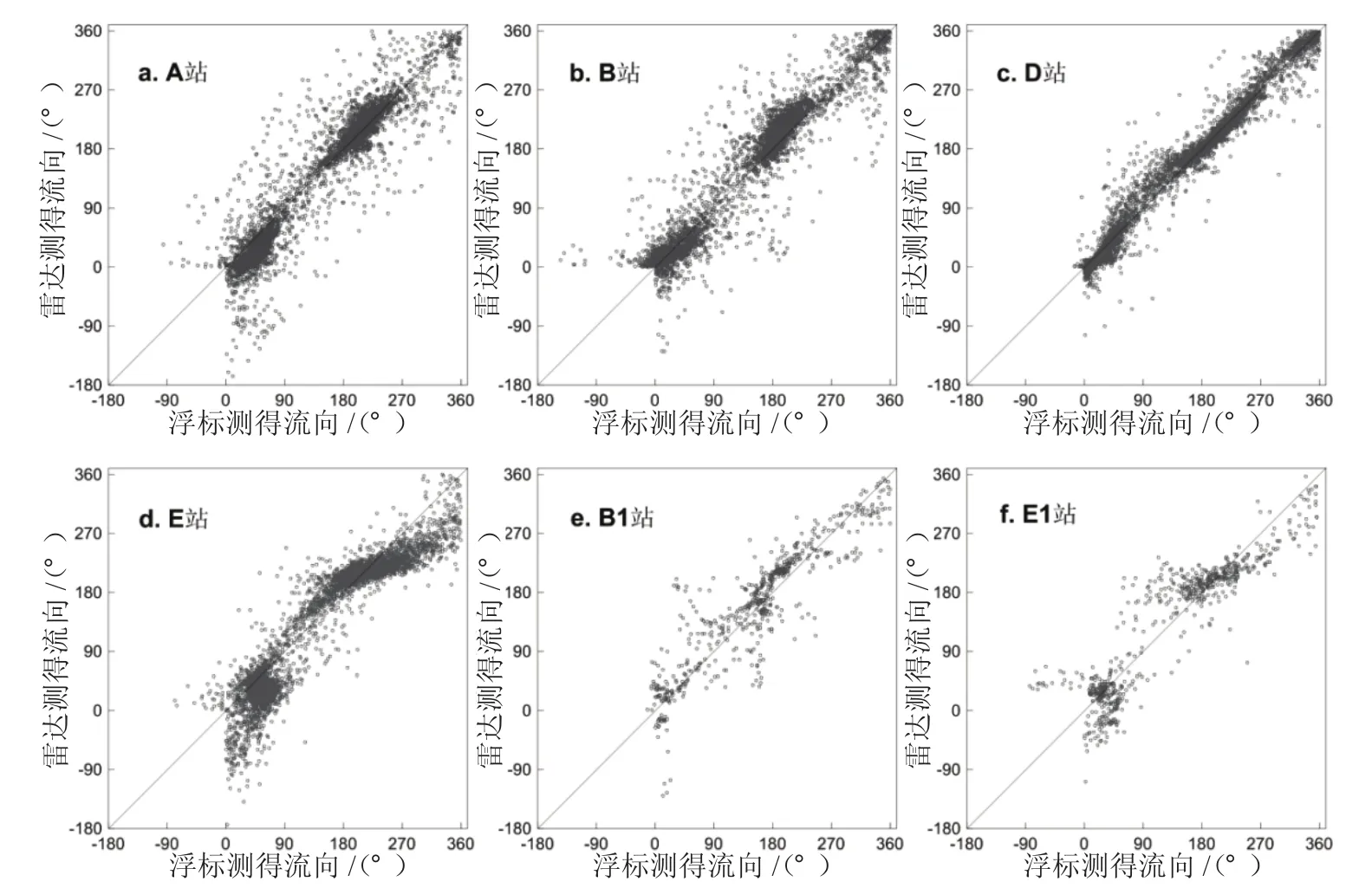
圖6 雷達合成流向與浮標代表層流向相關性散點圖
3.3雷達探測海流的精度
高頻地波雷達合成流流速與各浮標ADCP第5層流速的散點比較如圖5。A,B,D站雷達和浮標的流速比對結果均勻且集中地分布在1:1線的兩側,相關性較高,相關系數在0.91~0.95,誤差較小,平均誤差為-1~5.4 cm/s、平均絕對誤差為5.8~7.8 cm/s、均方根誤差為7.5~10.1 cm/s。E站的雷達和浮標流速的相關性也較高,相關系數為0.873,但雷達流速明顯高估,所以誤差也較大(θ為14.8 cm/s,Δm為15.4 cm/s,RMS為19.3 cm/s)。處在邊緣區的B1站的比對結果明顯偏離1:1線的數據較多,而E1站的雷達流速明顯高估且比對結果較為離散。
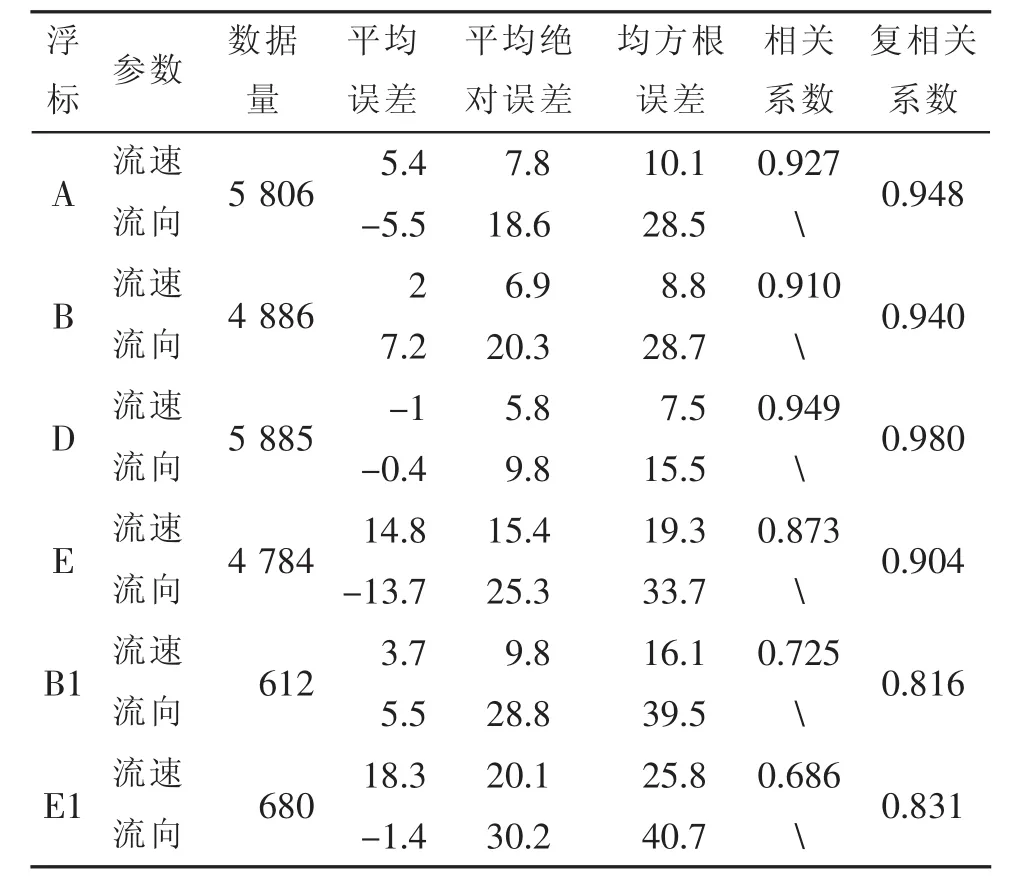
表1 雷達合成流誤差及相關性分析結果
對于矢量流流向(圖6),D站雷達和浮標的比對效果最好,復相關系數達到0.98,誤差也最小,θ為-0.4°,Δm為9.8°,RMS為15.5°。A,B,B1和E1站雷達和浮標的比對結果大部分較為集中地分布在1:1線的兩側,但出現部分的離散點,均方根誤差也較大,為28.5°~40.7°。E站當浮標流向為100°~220°時,雷達值略高估,其他情況下,雷達值總體低估。
為了更直觀地了解雷達在不同區域的探測精度,根據誤差分析結果,得出高頻地波雷達測流(矢量流流速、流向)的均方根誤差分布圖(圖7),流速誤差的單位是cm/s,流向誤差的單位是(°),離雷達站的距離越遠,雷達觀測的誤差越大。高精度區(A,B,D和E)雷達的探測精度高于邊緣區(B1和E1)。
總體上,陣列式高頻地波雷達海流有效探測區內的矢量流流速流向的觀測誤差較小,高精度區流速流向的均方根誤差(RMS)分別為7.5~19.3 cm/s和15.5°~33.7°,尤其是高精度區核心區域的RMS僅為7.5~10.1 cm/s和15.5°~28.5°,邊緣區流速流向的RMS為16.1~25.8 cm/s和39.5°~40.7°,與國內外達到業務化運行要求的同類產品實際觀測精度相當[3,5,12]。
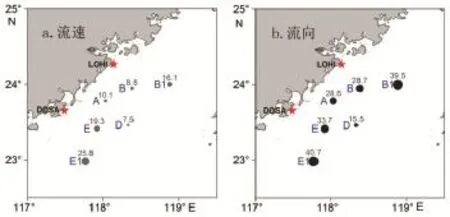
圖7 高頻地波雷達合成流流速流向均方根誤差分布
4 結論
試驗期間,雷達合成流的時間有效采樣率為92.6%,說明該系統基本上能穩定運行。雷達徑向流空間采樣率呈現近似橢圓分布,靠近雷達法向方向的采樣覆蓋率高于雷達扇區邊緣的區域,平均覆蓋率隨距離的增大而減小,115 km以內,雷達的覆蓋率可以達到90%,135 km以內80%,155 km以內60%。
通過試驗數據比對分析表明:(1)雷達探測海流復相關系數最高的出現在3.5 m;(2)雷達海流有效探測區內的矢量流流速流向的觀測誤差較小,高精度區流速流向的RMS分別為7.5~19.3 cm/s和15.5°~33.7°(其中核心區域的RMS為7.5~10.1 cm/s和15.5°~28.5°),邊緣區的RMS為16.1~25.8 cm/s和39.5°~40.7°,與國內外達到業務化運行要求的同類產品實際觀測精度相當。
本文側重從不同觀測深度和不同觀測區域長周期驗證了國產陣列式高頻地波雷達在探測海流方面的準確性、可靠性和穩定性,彌補了以往該方面研究的不足,為全面綜合地了解雷達系統海流探測性能及評估其適用性提供有力的根據。
致謝:參與本次試驗并提供數據支持的單位,在此一并表示衷心感謝。
[1]Crombie DD.Doppler SpectrumofSea Echoat 13.56 Mc./s[J].Nature,1955,175:681-682.
[2]Barrick D.First-Order Theoryand Analysis ofMF/HF/VHF Scatter from the Sea[J].IEEE Transactions on Antennas and Propagation,1972,20(1):2-10.
[3]朱大勇,李炎,郭小鋼,等.高頻地波雷達海流驗證研究述評[J].熱帶海洋學報,2013,32(4):1-7.
[4]吳世才,楊子杰,文必洋,等.高頻地波雷達的東海試驗[J].武漢大學學報:理學版,2001,47(1):111-117.
[5]Wyatt L R,Atwater D,Prytz A,et al.A Comparison Between SeaSonde and WERA HF Radar Current Measurements[C]//OCEANSBergen,2013 MTS/IEEE,Bergen,2013:1-4.
[6]Roarty H,Kohut J,Glenn S.Intercomparison of an ADCP,ADP,Standard and Long-Range HF RADAR:Influence of Horizontal and Vertical Shear[C]//Proceedings ofthe IEEE/OESSeventh WorkingConference on IEEE,2003:75-78.
[7]吳雄斌,楊紹麟,程豐,等.高頻地波雷達東海海洋表面矢量流探測試驗[J].地球物理學報,2003,6(3):340-346.
[8]Long R M,Barrick D E.Surface Current Measurements During Safe Seas 2006:Comparison and Validation of Measurements from High-FrequencyRadar and the Quick Release Estuarine Buoy[C]//OCEANS2007.IEEE,2007:1-7.
[9]Molcard A,Poulain P M,Forget P,et al.Comparison Between VHF Radar Observations and Data from Drifter Clusters in the GulfofLa Spezia(Mediterranean Sea)[J].Journal ofMarine Systems,2009,78:S79-S89.
[10]Lorente P,Piedracoba S,Fanjul E A.Validation of High-Frequency Radar Ocean Surface Current Observations in the NW of the Iberian Peninsula[J].Continental ShelfResearch,2015,92:1-15.
[11]Barrick D E.30 Years of CMTC and CODAR[C]//2008 IEEE/OES 9th Working Conference on Current Measurement Technology(CMTC),Charleston,2008:131-136.
[12]Helzel T,Kniephoff M,Petersen L.Oceanography Radar System WERA:Features,Accuracy,Reliability and Limitations[J].Turkish Journal ofElectrical Engineering&Computer Sciences,2010,18(3):389-398.
[13]周浩,文必洋,吳世才,等.亞帆賽間便攜式高頻地波雷達的海態觀測[J].電波科學學報,2012,27(2):293-300.
[14]Lorente P,Soto-NavarroJ,AlvarezFanjul E,et al.AccuracyAssessment ofHigh FrequencyRadar Current Measurements in the Strait ofGibraltar[J].Journal ofOperational Oceanography,2014,7(2):59-73.
[15]文必洋,李自立,周浩,等.便攜式高頻地波雷達東海洋山海域探測深度試驗[J].電子與信息學報,2010,32(4):998-1002.
[16]侍茂崇,高郭平,鮑獻文.海洋調查方法[M].青島:青島海洋大學出版社,2000.
[17]Stewart R H,Joy J W.HF Radio Measurements of Surface Currents[J].Deep Sea Research and Oceanographic,1974,21(12): 1039-1049.
[18]Kundu P K.Ekman VeeringObserved Near the Ocean Bottom[J].Journal ofPhysical Oceanography,1976,6(2):238-242.
Data Analysis of Long-Term Applicability Test for Surface Currents by HF Surface Wave Radar
XU Quan-jun1,WEI Guo-mei2,3,SHANG Shao-ping2,3,4,HE Zhi-gang2,3,4,DAI Hao2,3,LEI Fa-mei2,3,LIU Ke2,3
1.Marine Environment Special Office of the Chinese People's Liberation Army,Beijing 100081,China;
2.Key Laboratory of Underwater Acoustic Communication and Marine Information Technology,Ministry of Education,Xiamen University,Xiamen 361005,Fujian Province,China;
3.Research and Development Center for Ocean Observation Technologies,Xiamen University,Xiamen 361005,Fujian Province,China;
4.College of Ocean and Earth Sciences,Xiamen University,Xiamen 361102,Fujian Province,China
In order to evaluate the capability of current measurement,verification tests of the OSMAR071 HF surface wave radar system against in-situ measurements had been conducted during Jan 29 to Mar 15,2013.The comprehensive evaluation includes that(1)effective sampling rate and space coverage;(2)the depth of the current measured by radar;and(3)the precision of the currents measured by radar in different areas.The longterm verification suggests that the radar system can effectively retrieve the temporal and spatial variation of surface currents in the effective detection area.The error of the retrieved currents is relatively small,with a root mean square error(RMS)of 7.5-19.3 cm/s(speed)and 15.5-33.7°(direction)in high precision area,7.5-10.1 cm/s and 15.5-28.5°in the core area within the high precision area,and 16.1-25.8 cm/s and 39.5-40.7°in other areas,which is comparable to the actual observing accuracy of similar products at home and overseas.
HF Surface Wave Radar;long-term experiment;surface currents;detection depth of ocean currents
P715
A
1003-2029(2016)01-0023-07
10.3969/j.issn.1003-2029.2016.01.003
2015-10-08
國家高技術研究發展計劃(863計劃)資助項目(2012AA091906)
徐全軍(1969-),男,高級工程師,主要從事海洋環境觀測設備管理。E-mail:zcqxjxqj@126.com
賀志剛,男,博士,副教授,主要從事南海及其臨近海域環流的研究。E-mail:zghe@xmu.edu.cn
