混合驅動自主潛航器續航能力分析
2016-10-25 05:34:44王曉鳴
海洋技術學報 2016年1期
關鍵詞:系統
王曉鳴
(1.天津科技大學 機械工程學院,天津 300222;2.天津大學 機械工程學院,天津 300072)
混合驅動自主潛航器續航能力分析
王曉鳴1,2
(1.天津科技大學 機械工程學院,天津 300222;2.天津大學 機械工程學院,天津 300072)
混合驅動自主潛航器融合了自主潛航器機動靈活和水下滑翔機續航能力強的優點,針對自身攜帶能源有限的問題,對在兩種工作模式下如何實現最大航行距離進行了研究。從航行過程中的能源消耗入手,得出航行距離與速度、電子設備功率等的關系,通過理論分析和仿真手段得出最大續航能力的實現方法。在螺旋槳驅動模式下,當以經濟航速航行時,可以達到最大航行距離;在浮力驅動模式下,當以最大滑翔效率航行時,水平方向上的滑翔距離最大,并且水平方向上的滑翔距離隨著剖面深度的增大而增大,當剖面深度大到一定程度之后,最大滑翔距離趨于恒定。該研究方法可為類似水下航行器電源管理系統的能源分配提供參考,也可為航行器外形的設計和傳感器的選型提供理論指導。
混合驅動自主潛航器;續航能力;螺旋槳驅動;浮力驅動;經濟航速;滑翔效率
自主潛航器(Autonomous Underwater Vehicle,簡稱AUV)采用動力定位和航行姿態控制技術,能夠獲得良好的操縱性,但由于螺旋槳的能源消耗較大,需要攜帶大量的電池,難以實現小型化,續航能力較差,最大為數百千米;與自主潛航器相比,水下滑翔機(Autonomous Underwater Glider,簡稱AUG)具有兩方面的優勢:續航能力強和具有垂直剖面走航測量的功能,具有良好的探測能力,水下滑翔機的續航里程很容易達到1 000 km以上,但其缺點是操縱性較差,定位精度很低,很難準確保持任務航跡[1-4]。由于自主潛航器和水下滑翔機存在各自的優缺點,目前水下航行器正在朝混合方向發展,主要是AUV和AUG混合。在這個基礎上研發成功了混合驅動自主潛航器(Hybrid Autonomous Underwater Vehicle,簡稱HAUV),本文主要分析HAUV的續航能力[5-10]。
1 HAUV介紹
本文開發成功的HAUV主要由9部分組成,如圖1所示。
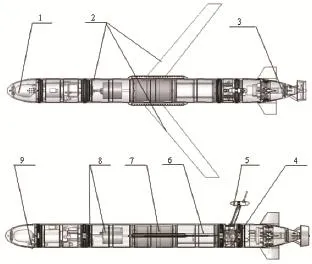
圖1 HAUV結構布局圖
混合驅動使HAUV同時具有AUV和AUG的優點,并克服了各自的缺點,續航里程長,同時具有動力定位能力,有利于完成深遠海的精確探測任務。針對海洋探測任務的需要,可搭載CTD、濁度計等海洋環境觀測儀器,在需要探測的航線上自主航行,探測深海剖面的溫度、鹽度和濁度的信息。探測過程中,根據數據的變化情況和任務指令可以隨時轉化為螺旋槳推進模式工作,對局部區域海洋數據進行精細探測。
HAUV的工作過程如圖2所示,首先將HAUV由海洋考察船放入特定的海域,HAUV在浮力驅動模式下進行大范圍的目標搜索;當HAUV接近預定目標后,則變換為螺旋槳驅動模式航行,在螺旋槳驅動模式下可以進行高精度定位,并能夠按照浮力驅動模式無法實現的精確軌跡航行。
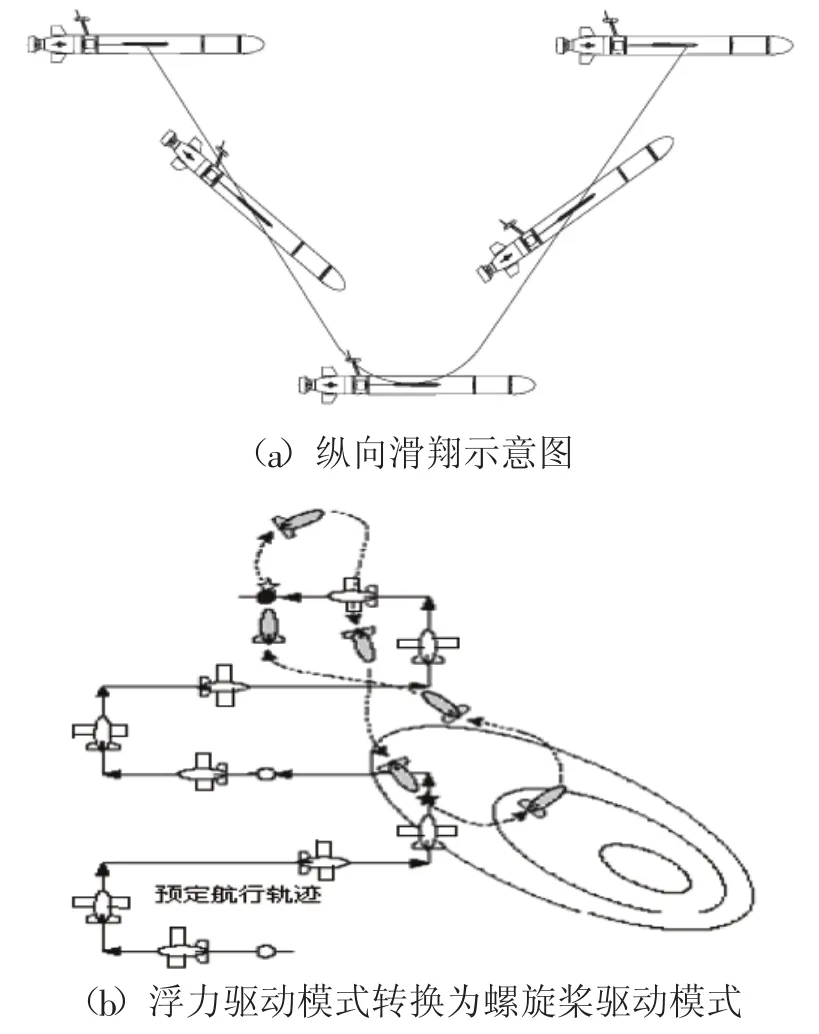
圖2 HAUV工作策略示意圖
HAUV的能源供給系統由3塊電池構成:(1)24 V鋰離子電池,其容量為28 Ah,用于給控制系統及傳感器供電;(2)24 V鎳氫電池,其容量為28 Ah,用于給浮力驅動泵及姿態調節裝置供電;(3)48 V鎳氫電池,其容量為14 Ah,用于給螺旋槳及舵機供電。如何利用自身攜帶的有限能源實現航行距離的最大化將是本文的主要研究內容。
2 螺旋槳驅動模式下的續航能力分析
在螺旋槳驅動模式下,24 V鋰離子電池和48 V鎳氫電池處于工作狀態,24 V鎳氫電池不工作或工作時間很短,所以暫不考慮24 V鎳氫電池的消耗。
在螺旋槳驅動模式下,定義如下變量:S為HAUV的航程,m;ηp為HAUV推進系統的效率;F為HAUV的航行阻力,N;Pd為推進系統的有效功率,W;Pe為用48 V鎳氫電池供電的其他電子設備的功率,W;VT為HAUV的巡航速度,m/s;We,Wd,WN48為其他電子設備、推進系統及系統的總能耗,J;t為續航時間,s。
HAUV的航行阻力可以近似表達為:

推進系統的總能耗:
Wd=Pdt/ηp=FVTt/ηp=FS/ηp,其他電子設備的總能耗We=Pet,所以有:
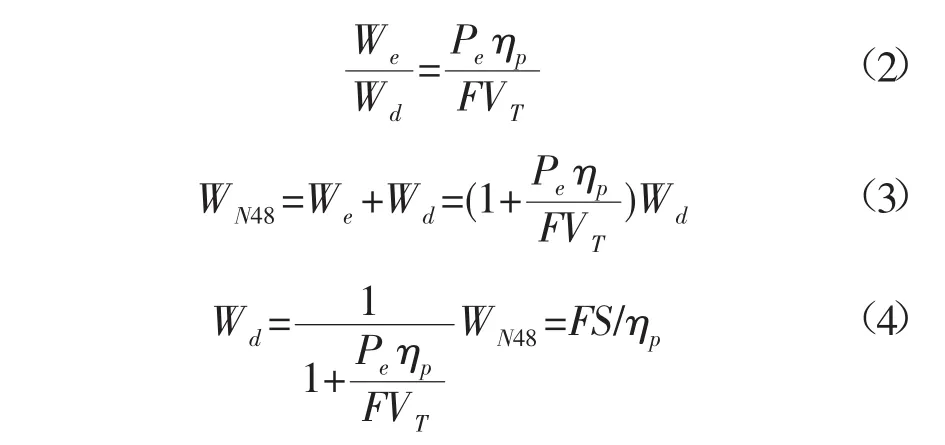
HAUV的總航程:
總航行時間:
HAUV推進系統的效率ηp=0.4,除螺旋槳之外其他電子設備的功率約為Pe=40 W,系統的總能耗等于48 V鎳氫電池所能釋放出的總能量WN48=48× 14×3600=2.4×106J,則航程和速度的關系如圖3所示。
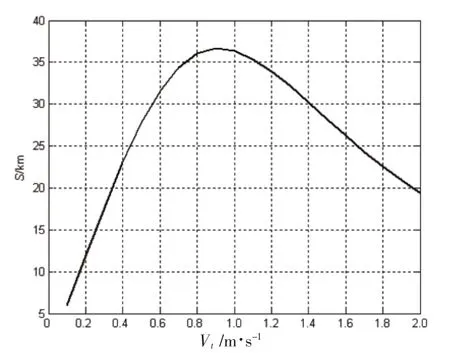
圖3 螺旋槳驅動模式下航速與航程的關系
總航程對速度求一階導數,得:
令S(VT)’=0,即可以求出航程最大時所對應的經濟航速:

對應的最大航程為:

總航行時間:
而控制系統和傳感器的總功率約為PS=8 W,24 V鋰離子電池的總能量WL=24×28×3 600=2.4×106J,鋰離子電池的續航時間為所以,HAUV可以在經濟航速下完成最大航程約36.6 km。
3 浮力驅動模式下的續航能力分析
在浮力驅動模式下,24 V鋰離子電池和24 V鎳氫電池處于工作狀態,48 V鎳氫電池不工作或工作時間很短,所以暫不考慮48 V鎳氫電池的消耗。
續航能力分析和螺旋槳驅動模式下類似,定義如下變量:
S為HAUV在水平方向上的航程,m;Pb為液壓泵的有效功率,W;ηb為液壓泵的效率;Pf為姿態調整系統的功率,W;Vx為HAUV在水平方向上的速度,m/s;Vy為HAUV在縱垂方向上的速度,m/s;d為剖面深度,m;Wf,Wb,WN24為姿態調整系統、泵及系統的總能耗,J;t為續航時間,s。
由于向上滑翔時和向下滑翔時的速度相差不大,簡單起見,用向下滑翔代替HAUV的全部工作過程,則完成一個剖面的時間
泵在一個剖面過程中的工作時間約為t2≈50 s,則泵的平均功率;姿態調整系統的實耗功率Pf≈30 W,其在一個剖面過程中的工作時間為t3,則其平均功率。泵消耗的能量Wb=P'bt,姿態調整系統消耗的能量Wf=P'ft,所以有
液壓泵的功率:

式中:Q為液壓泵流量,L/min;PS為系統壓力,bar。
本文暫不考慮泵效率隨深度的變化,將其作為定值,分析理想情況下滑翔距離與控制參數的關系。
在滑翔過程中,姿態調整系統并不實時調整姿態,只是將橫滾重物轉到平衡橫滾重物轉角,平移重物移動到某固定位置,做自由滑翔運動。這種情況下,在一個剖面過程中姿態調整系統的工作時間t3≈20 s。
由式(16)可得:
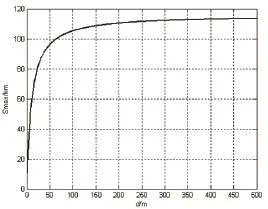
圖4 最大滑翔距離與剖面深度的關系

HAUV滑翔效率最高時水平方向上的速度約為Vx=0.25 m/s。如果控制系統連續工作,則HAUV的最大滑翔距離同時受24 V鎳氫電池續航時間和鋰離子電池續航時間的限制,當24 V鎳氫電池續航時間足夠時,最大滑翔距離由鋰離子電池的續航時間決定Smax=Vx×T×3.6=73.8 km。將Smax=73.8 km、Rmax=1.41[5]代入式(19)可求得臨界剖面深度dl=17.8 m。
當剖面深度d≤dl時,控制系統可以連續工作,HAUV以最高滑翔效率滑翔時的滑翔距離最大;當剖面深度d>dl時,HAUV以最高滑翔效率滑翔時,24 V鎳氫電池的續航時間大于鋰離子電池的續航時間,為了實現滑翔距離的最大化,控制系統應采取間歇工作策略,即每隔10 s或更長時間工作一次,記錄必要的傳感器數據,然后進入休眠模式,則鋰離子電池的續航時間將大大延長,可以完成最大滑翔距離。
HAUV的極限滑翔距離與螺旋槳驅動模式下的航行距離相當,并沒有充分體現出浮力驅動的優勢,這主要是由于選用的皮囊容積(V=1.5 L)太大引起的,較大的皮囊容積使得HAUV的滑翔速度快、機動性好。但是,由于由式(14)可知,液壓泵的功耗與皮囊容積成正比,在自身攜帶能源一定的情況下,由式(19)極限滑翔距離與皮囊容積成反比。
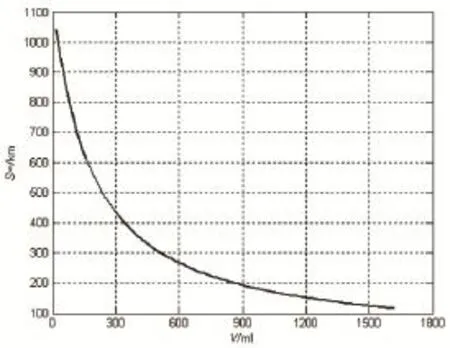
圖5 極限滑翔距離與皮囊容積的關系
4 結論
本文分析了混合驅動自主潛航器最大續航能力的實現方法。在螺旋槳驅動模式下,其經濟航速為0.9 m/s,對應最大航行距離36.6 km。在浮力驅動模式下,水平方向上的滑翔距離與滑翔效率和剖面深度相關,滑翔效率越高、剖面深度越大,水平方向上的滑翔距離越大,但當深度增大到一定程度后(500 m),最大滑翔距離趨于恒定,為116 km;在其他條件不變的情況下,混合驅動水下自航行器在水平方向上的最大滑翔距離與皮囊容積成反比。

圖6 HAUV航行照片
本文所開發HAUV只是一個原型樣機,其能源供給系統分為3個部分:控制系統電源、浮力調節系統電源和螺旋槳電源,而其他類似水下航行器的開發過程中,基本都會采用一個集中能源系統,并采用電源管理系統給各個部分分配電源,本文研究方法不僅可為電源的合理分配提供參考,在設計完成的情況下,除推進系統外的電子設備的功耗決定了經濟航速和最大航行距離,電子設備的工作時間又決定了可采集的數據量,可采用本文方法對能源進行有效的分配,在完成必要信息采集的基礎上,使航程達到最大,或在航程滿足要求的前提下,采集盡可能多的數據;除此之外,本文研究方法還可應用在潛器的設計初期,為傳感器的選型和外形設計提供理論指導。
[1]蔣新松,封錫盛,王棣棠.水下機器人[M].沈陽:遼寧科學技術出版社,2000.
[2]燕奎臣,李一平,袁學慶.遠程自治水下機器人研究[J].機器人,2002,24(4):299-303.
[3]BachmayerR,LeonardN,GraverJ,etal.UnderwaterGliders:RecentDevelopmentsandFutureApplications[C]//UnderwaterTechnology,2004,UT'04.2004 International Symposiumon,2004:195-200.
[4]Sherman J,Davis R E,Owens W B,et al.The Autonomous Underwater Glider“Spray”[J].IEEE Journal ofOceanic Engineering,2001,26(4):437-446.
[5]王曉鳴.混合驅動水下自航行器動力學行為與控制策略研究[D].天津:天津大學,2009.
[6]Hyakudome,Tadahiro,et al.BuoyancyControl for Deep and LongCruisingRange AUV[C]//Proceedings ofthe 12th(2002)International Offshore and Polar EngineeringConference,2002,12:325-329.
[7]Zhao Wen-De,Xu Jian-An,Zhang Ming-Jun.A Variable Buoyancy System for Long Cruising Range AUV[C]//2010 International Conferenceon Computer,Mechatronics,Control and Electronic Engineering,CMCE 2010,2010,2:585-588.
[8]Aoki,Taro,Yokosuka,Kanagawa,et al.Advanced Technologies for Cruising AUV Urashima[J].International Journal of Offshore and Polar Engineering,2008,18(2):81-90.
[9]Hobson,Brett W,Bellingham,et al.Tethys-Class Long Range AUVs-Extending the Endurance of Propeller-Driven Cruising AUVs fromDays toWeeks[C]//2012 IEEE/OESAutonomous Underwater Vehicles.
[10]Zhao Wei,Yang Can-Jun,Chen Ying.Design and Dynamic Performance Study of Buoyancy Regulating System of Autonomous Underwater Glider[J].Journal ofZhejiangUniversity,2009,43(10):1772-1776.
Analysis on the Cruising Ability of the Hybrid Autonomous Underwater Vehicle
WANG Xiao-ming1,2
1.College of Mechanical Engineering,Tianjin University of Science&Technology,Tianjin 300222,China;
2.School of Mechanical Engineering,Tianjin University,Tianjin 300072,China
The hybrid autonomous underwater vehicle(HAUV)has the advantages of high mobility of autonomous underwater vehicle(AUV)and outstanding cruising ability of autonomous underwater glider(AUG).To resolve the problem of limited onboard electrical power,research is conducted on how to realize the maximal cruising range under two modes.Considering the energy consumption during the cruise,this paper derives the relationship among distance,speed and the power of electronic equipment.The method with which the maximal cruising ability can be obtained is developed through theoretical analysis and simulation.In the propeller-driven mode,the maximal range can be achieved with the economic speed.In contrast,in the buoyancy-driven mode,the maximal gliding range in the horizontal direction can be obtained with the maximal gliding efficiency,and the gliding range becomes larger with increasing profile depth.The gliding range tends to be constant when the depth is large enough.This method is helpful for the power management system of similar underwater vehicles,and can provide theoretical guidance for the configuration design and sensor selection.
hybrid autonomous underwater vehicle(HAUV);cruising ability;propeller-driven mode;buoyancydriven mode;economic speed;gliding efficiency
P715;TP242.3
A
1003-2029(2016)01-0036-05
10.3969/j.issn.1003-2029.2016.01.005
2015-09-20
王曉鳴(1981-),男,博士研究生,講師,主要研究方向為機電一體化技術。E-mail:wxm@tust.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
