基于S7-400H的功率管理系統在海洋平臺中的應用
2016-10-27 07:55:13張奇,金奎
船電技術 2016年8期
張 奇,金 奎
?
基于S7-400H的功率管理系統在海洋平臺中的應用
張 奇,金 奎
(武漢船用電力推進裝置研究所,武漢 430064)
為了實現350英尺自升式多功能服務平臺項目中的電站功率管理功能,設計了滿足系統功能要求的冗余功率管理系統,詳細描述了該系統的功能、結構、接口、軟件設計等內容。該系統結構以西門子S7-400H PLC和DEIF并車保護單元(PPU)為核心,并采用西門子TIA Portal進行軟件設計。通過在項目中的實際應用證明,本系統功能完善,操作方便,滿足項目使用要求。
S7-400H冗余 并車保護單元 功率管理系統
0 引言
350英尺自升式多功能服務平臺是一款4樁腿多功能自升式服務平臺,適用于無限航區航行,全船設有三臺全回轉的尾部推進器和三臺管隧式首側推,采用電力推進系統技術,為滿足DP-2及電力推進需求,設計了冗余的功率管理系統(簡稱PMS)。PMS根據電力推進系統的功率需求,自動的管理發電機組的運行和電能的分配[1]。PMS適用于電力推進系統,模塊化的設計使系統簡潔、易于升級。PMS內置于配電板中,根據功率的需求對每臺柴油發電機組進行監控并協調各柴油發電機組的工作,并可以對電站系統進行故障診斷和處理。
1 系統硬件設計
1.1系統功能
PMS主要由PMS控制主站、PMS后備控制站、觸摸屏、柴油發電機組并車保護單元(PPU)組成。每套柴油發電機組配一套PPU,它可以控制柴油發電機組的調頻調載、負載分配、并車解列,并提供機組的安全保護功能[2]。PPU通過通訊總線將信息送給PMS主控站,由PMS主控站完成PMS的其它功能和安全保護,并在觸摸屏上進行工況顯示。觸摸屏可以監測柴油發電機組的運行工況及全船重要用電設備的工況,可以通過觸摸屏手動控制機組的并網、解列以及更改控制參數。PMS主控站和后備控制站之間熱備冗余。
1.2系統結構
PMS設置了一個PLC控制器作為主站,同樣為每臺發電機組設置了一個機組并車保護單元(PPU)作為從站。PLC控制器采用西門子公司PLC及輔件構成,機組控制器采用DEIF公司PPU3及輔件構成。 PMS自帶觸摸式操作面板(HMI),用以常用參數設置和重要參數及狀態的指示。PMS基本結構如圖1所示。
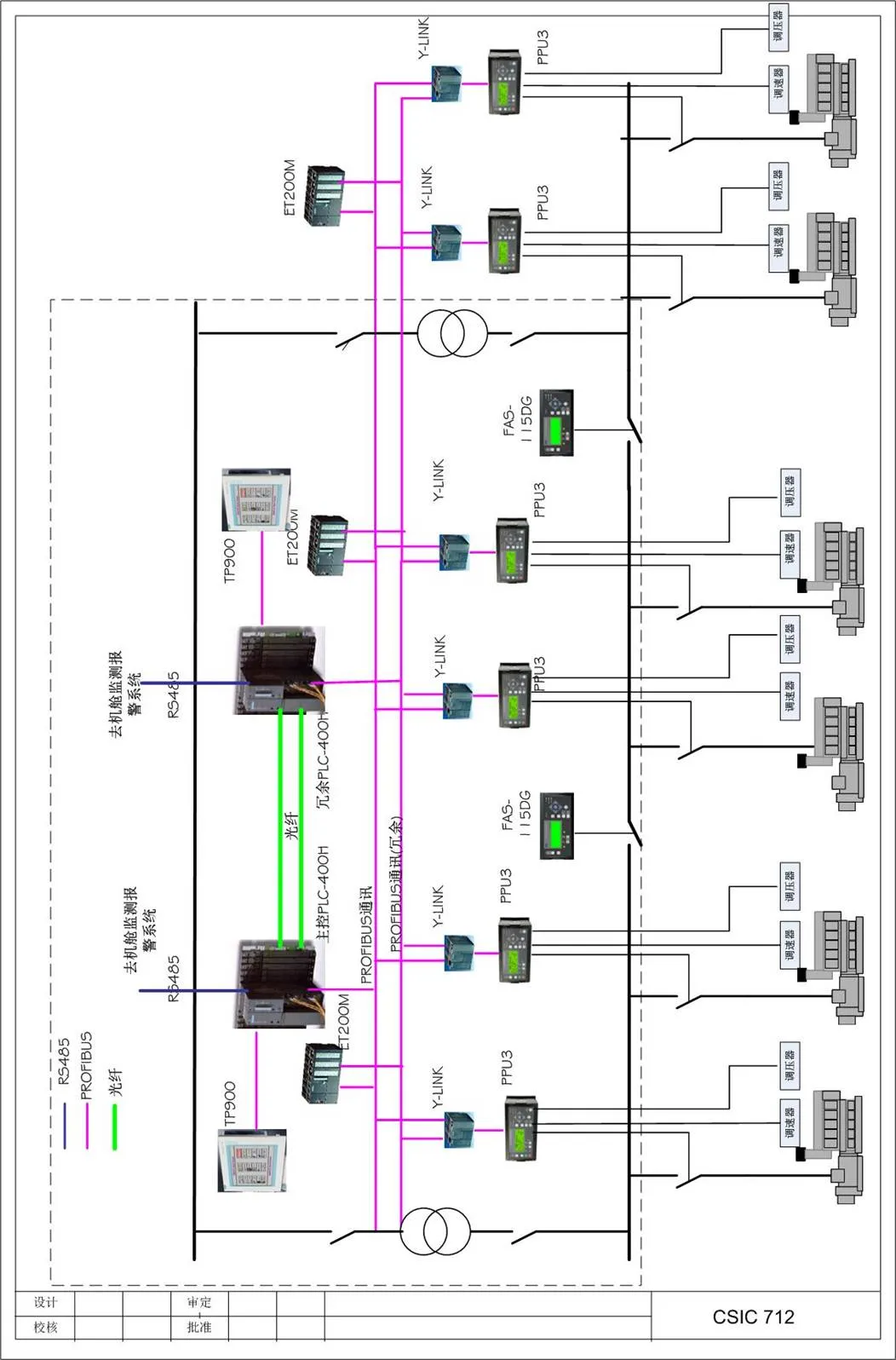
圖1 PMS系統結構圖
為了確保供電連續性和系統可靠性,PMS采用兩級控制網絡完成。上層采用冗余的PROFIBUS控制網絡,PLC控制器采用西門子的兩套S7-400H熱冗余控制器,S7-400H配置有2個同步模塊,通過光纖進行實時同步通訊,兩套S7-400H獨立運行并互為備用。一套S7-400H將在電站功率管理系統中發揮主控制站的功能,另一套則運行在備用控制站的狀態。一旦主用S7-400H出現故障,備用S7-400H將被自動切換成主用控制器。控制器的切換時間小于100 ms。上層PROFIBUS通過Y-link連接DEIF公司的PPU3。與機艙監測報警系統的接口采用兩路485,采用MODBUS RTU協議發送PMS系統狀態及相關參數。PMS配置兩個9寸觸摸屏(TP900)作為人機界面交互,互為備用,分別布置在配電板同步屏上,可進行相關PMS控制操作、參數設置、運行狀態及報警顯示。觸摸屏采用英文圖形界面。
1.3硬件組成
PMS主要硬件組成如下:
1)西門子冗余PLC S7-412H 一套。主要包括:UR-2H機架、電源模塊PS407、CPU412H、同步模塊、同步光纜(1m)、MMC存儲卡(4M)、電池。
2)YLink套件六套。主要包括:YLink有源背板、IM153-2有源背板、IM153-2接口模塊、YLink模塊。
3)ET200M分布式子站三套。主要包括:ET200M、IM153冗余連接模塊、I/O冗余連接模塊、I/O輸入輸出模塊等。4)PPU3并車保護單元六套。5)TP900精智觸摸屏兩塊。
2 系統接口設計
2.1電源接口
為滿足DP2模式下的FMEA(故障模式分析)要求,外部電源采用三臺在線式不間斷電源UPS(DC24V/1.5kVA)分別為三個子站獨立供電要求,各個子站電源故障情況下均不會對其他子站運行造成影響。同時,為提高PMS可靠性,另外接三路來自充放電板的DC24V作為備用電源,確保UPS故障時PMS仍然能夠正常運行。
2.2控制及信號接口
PMS接口對象主要包括:柴油發電機組、配電板、重載設備、推進變頻器、DP設備等,主要包含以下接口內容:
柴油發電機組:機組啟動、機組停機、機組報警、機組故障、升/降速控制、升/降壓控制、遙控狀態、備車狀態、急停控制等接口。
配電板:開關狀態及合分閘控制、絕緣低報警、應急切斷、優先脫扣、PMS模式轉換開關等接口。
重載設備:重載詢問、重載運行、允許啟動等接口。
推進變頻器:推進斷路器合分閘及狀態、機組功率信號、快速降負荷信號等接口。
DP設備:PMS提供與DP的接口,發送PMS開關狀態、機組運行狀態、實時功率等數據,并接收DP系統控制指令實現DP系統功率管理。
2.3網絡通訊接口
PMS內部各分布式子站及PPU3間的通訊接口采用Profibus-DP通訊;通過PPU可以讀取發電機電壓、電流、功率、功率因數、頻率等信息;
與機艙監測報警系統的通訊接口采用485 Modbus-Rtu通訊,可實時向機艙監測報警系統PMS實時功率、運行狀態、斷路器的狀態和報警信號等;
與人機界面(TP900觸摸屏)采用MPI通訊,通過觸摸屏可以在線監測PMS實時功率、運行狀態、斷路器的狀態和報警信號等。
3 軟件設計
3.1程序描述
PMS采用SIEMENS公司S7-300 PLC控制器,控制程序采用SIEMENS公司的Step7V5.5編程工具開發,通過Step 7軟件包可以實現程序編制、調試等功能。PLC控制程序可以采用語句表(STL)、梯形圖(LAD)及功能圖(CFC)來編寫。Step 7編程語言與SIMATIC S7系列可編程序控制器PLC相結合,用以實現各種自動控制功能[3]。
PLC程序采用了典型的結構化程序設計思想,采用軟件塊來構造程序。各功能模塊可以單獨進行調試運行,對各種參數進行統一管理,這樣使得程序結構清晰,易于調試和維護,可靠性強。軟件塊分組織塊OB、功能塊FB、功能FC、數據塊DB。組織塊OB是操作系統與用戶的接口,用以管理用戶程序,可用于循環、中斷驅動或定時驅動。PLC系統在運行時循環調用組織塊OB1,用戶程序從OB1開始自頂向下構造。功能塊FB是在邏輯操作塊內的功能或功能組,在操作塊內分配有存儲器,并存儲有變量,需要背景數據塊。功能FC是類似于FB的邏輯操作塊,但是不分配存儲區,不需要背景數據塊。數據塊DB存貯用戶數據。本系統控制程序主要使用了啟動塊OB100、OB101、OB102; I/O訪問錯誤中斷運行塊OB122;周期循環運行的OB1;以及各種被OB1調用的功能塊FB和功能FC。利用塊調用把各個塊組織在一起,組成一個完整的用戶程序。
3.2軟件功能
PMS根據功率的需求對每套機組進行功率管理并協調各機組的工作,對供電系統進行故障報警和處理,為電力推進系統及其他用電設備提供可靠、穩定及優化配置的電力能源。
該系統的主要功能如下:
1)控制模式選擇
PMS具有手動、自動控制模式選擇,手動是指通過觸摸屏手動控制發電機組的起停、并網、解列。自動控制是指PMS程序自動控制發電機組的相關功能。
2) PMS模式選擇
PMS具有港口、航行模式、DP模式和升降平臺模式。在港口模式,系統不再按照功率關系解列機組,而是只增機不減機;在航行模式,按照系統正常模式增減機;DP模式,配電板分區供電;升降平臺模式,根據諧波計算的結果,保證在該模式下的發電機組在網數量。
3)發電機組手動遙控起停
當PMS工作在手動模式下,在PMS的觸摸屏上可直接手動控制發電機組的起動、停止;當PMS工作在自動模式下,程序根據電站負載的狀況自動控制發電機組的起動、停止。
4)機組備用/優先選擇(用戶可編程機組優先級順序)
PMS對柴油發電機組的起/停順序按照優先級管理,并可在線修改機組的優先級順序。當柴油機起動成功之后,可以自動并網合閘。當系統發出停車指令后,可以自動解列/停車。
5)電站運行狀態監測備用發電機組自動起動
系統監測到一臺發電機組預報警,則立即起動備用機組投入電網,以預防單臺發電機組故障對電網的影響。
6)自動同步、增機和解列、減機
推進負載不同,對電站的功率需求就不同,在網發電機數量應根據負載不同動態調整。可根據實際的使用情況及機動性能的要求,實現自動起動、同步并網備用機組,或者自動解列和停止在網的一臺機組。
7)大功率負載起動詢問
大功率設備啟動前,需向全船功率管理系統申請,全船PMS將檢測在網的可用功率,當在網可用功率滿足該設備起動條件時,管理系統發出允許啟動信號。否則首先鎖止該設備的起動,同時增加在網功率,滿足該設備的啟動和運行條件。
9)過負載自動分級卸載
將船上各類負載分級,當故障發生或啟動大負載,需對功率進行限制時,先將優先級低的或當時不重要的負載卸載,以保證推進系統的運行。
10)自動負荷分配
PMS系統實施采集每臺發電機組的功率,通過PPU可以實現發電機組在并網、運行、解列過程的負荷自動分配。
11)功率限制功能
當在網功率不能滿足推進功率和其他設備的需求是,PMS會發出功率限制指令給推進系統限制推進功率的增加。
12)觸摸屏監測功能
彩色觸摸屏的動態顯示:在觸摸屏上動態實時監測柴油發電機組的運行狀態、匯流排電壓、頻率等運行參數、電能分配狀況等;同時可以在線修改電網設置參數。
故障報警功能:對柴油發電機組進行動態實時故障報警監測,并對故障進行相應的處理。
13)最小發電機組數量功能
系統可以設定在網發電機組的最小數量,即使在實際功率比較低的情況下也不減機。
14)系統自檢功能
系統在起動過程中進行自檢,系統本身出現的問題通過屏幕故障報警。
3.3性能指標
CPU 循環處理OB1。并逐行地讀取及執行程序命令。當CPU 返回到第一個程序行時,它已經完成一個循環處理。所需要的平均掃描循環時間不大于15 ms;
系統采用模塊化設計,系統易于維護;
系統采用統一的組態、編程,數據管理;
PMS及發電子站子網采用Profi-Bus總線型電氣網絡,通訊速率1.5 Mbit/s;
功率管理系統技術指標:
1) 啟動成功達到投網電壓后自動投入的時間小于30 s。
2) 機組投入運行后,頻率調節精度為50±0.5 Hz。
3) 任意發電機組長期并聯運行,當總負荷率在20%~100%和功率因數在0.6~0.9(滯后)范圍變化時,保證有功功率分配差度不大于5%。
4) 當解列發電機組經負荷轉移后,負荷率低于10%(可調),電流不超過30%In(可調)時發出分閘指令。
3.4程序及畫面設計
PMS控制程序按照模塊化設計的思想,整個系統主要分為以下幾個功能模塊:母線失電處理功能模塊,PMS重載增機處理功能模塊,PMS輕載減機處理功能模塊,分級卸載處理功能模塊,禁止多臺發電機主開關同時合閘功能模塊。PMS總流程圖如圖2。

圖2 PMS控制程序總流程圖
MS中的觸摸屏軟件采用西門子TIA Portal進行軟件設計,主要包含單線圖、電氣參數、機組狀態、系統設置、報警列表等菜單等功能。
4 結束語
本文主要從系統結構、硬件組成、系統接口、軟件功能和性能等方面闡述了350英尺自升式多功能服務平臺項目中的功率管理系統(PMS)的系統。實際應用證明,本系統功能完善,操作方便。
參考文獻:
[1] 尚安利, 張達寬. 電力推進船舶功率管理系統綜述[J]. 船電技術, 2011, 31(10).
[2] 柯常國, 王勁, 楊俊飛. 電力推進船舶功率管理系統設計和研究[J]. 船電技術, 2013, 33(9).
[3] 向曉漢. 西門子PLC工業通信完全精通教程. 北京:化學工業出版社, 2013.
Application of S7-400H-based Power Management System to Offshore Platform
Zhang Qi, Jin Kui
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM761
A
1003-4862(2016)08-0013-04
2015-12-15
張奇(1986-),男,碩士。研究方向:船舶電力推進系統設計與應用。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39