基于固態(tài)切換開關(guān)的感應(yīng)電機(jī)類負(fù)荷電源快速切換新策略及參數(shù)計(jì)算
2016-10-29 06:28:07崔學(xué)深張自力王澤忠李和明楊婭萍
電工技術(shù)學(xué)報(bào) 2016年18期
崔學(xué)深 張自力 王澤忠 李和明 楊婭萍
?
基于固態(tài)切換開關(guān)的感應(yīng)電機(jī)類負(fù)荷電源快速切換新策略及參數(shù)計(jì)算
崔學(xué)深1張自力2王澤忠1李和明1楊婭萍3
(1. 華北電力大學(xué)電氣與電子工程學(xué)院 北京 102206 2. 國(guó)網(wǎng)邯鄲供電公司 邯鄲 056002 3. 國(guó)網(wǎng)河北成安縣供電公司 成安 056700)
艦船、電廠和鋼鐵等生產(chǎn)中的重要負(fù)荷感應(yīng)電機(jī)失電后要求快速地切換至備用電源,但這類動(dòng)態(tài)負(fù)荷在不利條件下所帶來的瞬態(tài)沖擊會(huì)產(chǎn)生嚴(yán)重的后果。為解決這一問題,提出一種基于固態(tài)切換開關(guān)(SSTS)的感應(yīng)電機(jī)類負(fù)荷電源快速切換控制新策略,其在各種備用電源與主電源間相位差下,既能夠快速將關(guān)鍵負(fù)荷從主電源切換至備用電源上,又能夠有效抑制電源切換中的瞬態(tài)沖擊;然后,深入分析了備用電源投入控制過程中感應(yīng)電機(jī)的復(fù)雜瞬態(tài),重點(diǎn)討論了影響瞬態(tài)沖擊抑制的主要因素;此外,還研究計(jì)算了已知備用電源與主電源間具有相位差時(shí)控制參數(shù)與電流峰值之間的關(guān)系,并根據(jù)電流抑制需求確定控制參數(shù);最后,通過定子電流計(jì)算結(jié)果和實(shí)測(cè)波形,驗(yàn)證了所提電源快速切換控制策略及參數(shù)計(jì)算的正確性和有效性。
電源快速切換新策略 固態(tài)切換開關(guān) 控制參數(shù) 限流 感應(yīng)電機(jī)
0 引言
大型工礦企業(yè)的重要負(fù)荷對(duì)供電可靠性的要求越來越高,如艦船、電廠、鋼廠、化工及其他制造業(yè)生產(chǎn)中的某些關(guān)鍵感應(yīng)電機(jī)類負(fù)荷,常同時(shí)配置兩路以上的獨(dú)立電源,以保證重要拖動(dòng)系統(tǒng)的連續(xù)穩(wěn)定運(yùn)行[1-4]。在正常情況下,由主電源向感應(yīng)電機(jī)供電,當(dāng)主電源出現(xiàn)故障或者例行檢修等問題時(shí),需立即切換到備用電源上,實(shí)現(xiàn)高可靠不停電操作,且不允許有長(zhǎng)時(shí)間掉電、轉(zhuǎn)速大幅度下降等情況發(fā)生。此外,在主電源恢復(fù)正常后,需要再次進(jìn)行電源切換,將電機(jī)恢復(fù)為主電源供電。然而,當(dāng)備用電源與主電源間相位差較大時(shí),感應(yīng)電機(jī)電源切換中會(huì)出現(xiàn)較嚴(yán)重的瞬態(tài)沖擊問題[5-7],對(duì)其所在的供電系統(tǒng)和電機(jī)設(shè)備都會(huì)造成損害,輕者影響生產(chǎn),重者造成重大經(jīng)濟(jì)損失甚至危及人身安全。
目前,主要使用自動(dòng)轉(zhuǎn)換開關(guān)(Automatic Transfer Switch, ATS)來實(shí)現(xiàn)感應(yīng)電機(jī)的電源切 換[8],并采用快速切換、同期捕捉切換和殘壓切換這三種常見電源切換方式來抑制瞬態(tài)沖擊[9-15]。但是由于ATS多為機(jī)械轉(zhuǎn)換開關(guān),其固有特性使得切換時(shí)間過長(zhǎng)、可控性差,且存在觸頭松動(dòng)、起弧等現(xiàn)象[16],這些缺點(diǎn)及三種常見切換方式適用條件限制了其應(yīng)用。為克服這些問題,以固態(tài)切換開關(guān)(Solid State Transfer Switch, SSTS)代替ATS這種機(jī)械開關(guān),再利用SSTS的可控性,從而可以根據(jù)實(shí)際需求設(shè)計(jì)靈活多變的控制方法。對(duì)此,文獻(xiàn)[17-19]初步進(jìn)行了這一系列的研究。其中,文獻(xiàn)[17]針對(duì)感應(yīng)電機(jī)轉(zhuǎn)速近似同步速時(shí)的重合閘問題,基于SSTS設(shè)計(jì)了一種電源快速軟投入方法,能夠快速實(shí)現(xiàn)重合閘,并抑制其中的瞬態(tài)沖擊,但其控制策略和參數(shù)較為復(fù)雜,控制過程也相對(duì)較長(zhǎng)。文獻(xiàn)[18,19]在文獻(xiàn)[17]的基礎(chǔ)上,進(jìn)一步簡(jiǎn)化、改進(jìn)SSTS控制策略,針對(duì)感應(yīng)電機(jī)重合閘和電源切換提出了一種較為簡(jiǎn)單的分相快速投入控制方法,尤其適合于重合閘或者備用電源與主電源相位差不大的情況,但對(duì)于兩電源相位差較大時(shí),其控制沖擊效果并不好。
基于以上研究結(jié)果,本文提出一種基于SSTS的感應(yīng)電機(jī)電源快速切換控制新策略,它可以在各種備用電源與主電源相位差下,尤其是相位差較大時(shí),快速實(shí)現(xiàn)感應(yīng)電機(jī)類負(fù)荷無(wú)沖擊地進(jìn)行電源快速切換。相對(duì)文獻(xiàn)[17]中的電源快速軟投入,該方法控制參數(shù)較少、控制策略簡(jiǎn)單易行。相對(duì)文獻(xiàn)[18, 19]中的分相快速投入,其抑制瞬態(tài)沖擊的效果更好,且控制過程持續(xù)時(shí)間位于兩者之間。此外,本文還深入分析備用電源投入控制過程中感應(yīng)電機(jī)的復(fù)雜交替瞬態(tài)過程,重點(diǎn)討論控制參數(shù)對(duì)各階段定子瞬態(tài)電流峰值的影響。然后,在已知相位差下研究計(jì)算控制參數(shù)與電流峰值之間的關(guān)系,并基于限流思想確定控制參數(shù)。最后通過實(shí)驗(yàn)結(jié)果驗(yàn)證所提出的電源快速切換控制新策略及參數(shù)計(jì)算是正確可行的。
1 感應(yīng)電機(jī)電源快速切換控制新策略
基于SSTS的感應(yīng)電機(jī)電源快速切換系統(tǒng)主接線如圖1所示,圖1中KM1和KM2為斷路器,SCRs1和SCRs2為三相反并聯(lián)晶閘管組,如圖1點(diǎn)劃線框中所示,顯然系統(tǒng)結(jié)構(gòu)與SSTS相同。
以感應(yīng)電機(jī)從主電源快速切換到備用電源為例,介紹所提出的感應(yīng)電機(jī)類負(fù)荷電源快速切換控制新策略。開始時(shí)感應(yīng)電機(jī)由主電源供電,KM1閉合、KM2斷開,且兩晶閘管組均不觸發(fā)導(dǎo)通。當(dāng)系統(tǒng)判斷出需要將感應(yīng)電機(jī)切換至備用電源時(shí),首先斷開KM1,同時(shí)觸發(fā)導(dǎo)通晶閘管組SCRs1,電流轉(zhuǎn)移至晶閘管,而后撤銷SCRs1的觸發(fā)信號(hào)。然后,通過電壓互感器、CPU等判斷出備用電源B相電壓由正到負(fù)過零點(diǎn),并以該點(diǎn)為備用電源投入控制的參考點(diǎn)。先按照初始兩相觸發(fā)延遲角0同時(shí)觸發(fā)導(dǎo)通晶閘管組SCRs2中的SCRB和SCRC,再按第三相觸發(fā)延遲角1觸發(fā)導(dǎo)通SCRs2中的SCRA,之后每隔60°依次對(duì)稱觸發(fā)導(dǎo)通SCRC、SCRB和SCRA,至軟切換過程結(jié)束。同時(shí)觸發(fā)三相晶閘管,全投入三相晶閘管,最后再將KM2閉合,停止旁路晶閘管組SCRs2的觸發(fā)脈沖。這樣就完成了感應(yīng)電機(jī)從主電源快速切換到備用電源的過程,并抑制了其瞬態(tài)沖擊電流。在這種控制策略實(shí)施下,備用電源投入中定子電流典型波形及觸發(fā)脈沖如圖2所示,圖2中還給出了備用電源B相電壓波形(實(shí)際值的1/30)和晶閘管觸發(fā)序列,該圖形象展示了兩個(gè)控制參數(shù)0和1的定義以及晶閘管觸發(fā)序列。
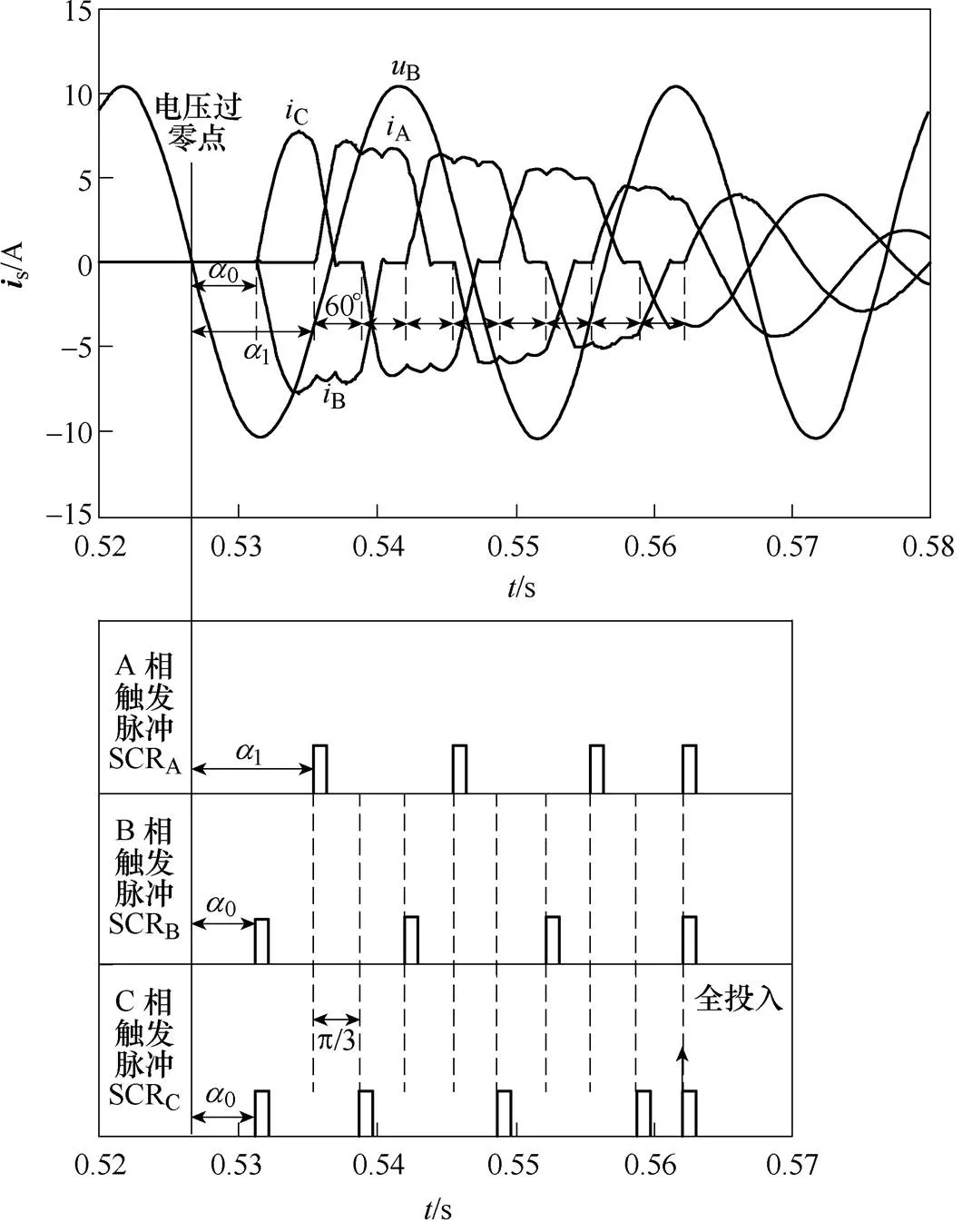
圖2 備用電源投入中定子電流典型波形及觸發(fā)脈沖
感應(yīng)電機(jī)這種電源快速切換控制策略,是通過控制備用電源投入過程中晶閘管的導(dǎo)通,并利用晶閘管自然過零關(guān)斷的特性,使得感應(yīng)電機(jī)定子繞組與備用電源相接通的相數(shù)在兩相、三相之間交替變化,即感應(yīng)電機(jī)運(yùn)行狀態(tài)在兩相不對(duì)稱瞬態(tài)和三相對(duì)稱瞬態(tài)交替變化,使磁通(或者磁鏈)接近平滑地按照開螺旋的軌跡過渡到穩(wěn)態(tài),從而實(shí)現(xiàn)一種快速調(diào)壓的效果,最終消除瞬態(tài)沖擊,因此,也將該快速切換稱為“快速軟切換”。
2 影響備用電源投入控制的因素分析
由感應(yīng)電機(jī)電源快速切換控制策略及圖2所示的典型受控定子電流波形可知,備用電源投入控制中感應(yīng)電機(jī)運(yùn)行狀態(tài)呈現(xiàn)復(fù)雜交替變化特點(diǎn),具體如圖3所示。備用電源投入感應(yīng)電機(jī)之前,先將電流從KM1轉(zhuǎn)移至SCRs1,然后撤銷SCRs1的觸發(fā)脈沖,從而切除主電源,這時(shí)感應(yīng)電機(jī)首先進(jìn)入轉(zhuǎn)子自由運(yùn)動(dòng)過程。當(dāng)系統(tǒng)按照初始觸發(fā)延遲角0控制SCRs2中的SCRB和SCRC同時(shí)導(dǎo)通后,備用電源投入控制開始,這時(shí)感應(yīng)電機(jī)進(jìn)入“初始B、C兩相不對(duì)稱瞬態(tài)”;當(dāng)系統(tǒng)以第三相觸發(fā)延遲角1控制SCRs2中的SCRA導(dǎo)通時(shí),感應(yīng)電機(jī)進(jìn)入“初始三相對(duì)稱瞬態(tài)”。此后,感應(yīng)電機(jī)交替出現(xiàn)兩相不對(duì)稱瞬態(tài)和三相對(duì)稱瞬態(tài),其中,感應(yīng)電機(jī)兩相不對(duì)稱瞬態(tài)是某相定子繞組電流過零導(dǎo)致對(duì)應(yīng)相中的晶閘管組自然關(guān)斷的結(jié)果,而三相對(duì)稱瞬態(tài)則是按對(duì)稱觸發(fā)策略控制已關(guān)斷晶閘管組再次導(dǎo)通的結(jié)果。結(jié)合圖2和圖3可以發(fā)現(xiàn),控制參數(shù)0決定“初始B、C兩相不對(duì)稱瞬態(tài)”中的電流波形及電流峰值,而1則決定“初始三相對(duì)稱瞬態(tài)”及緊隨其后的A、B兩相不對(duì)稱瞬態(tài)中的電流波形及電流峰值。
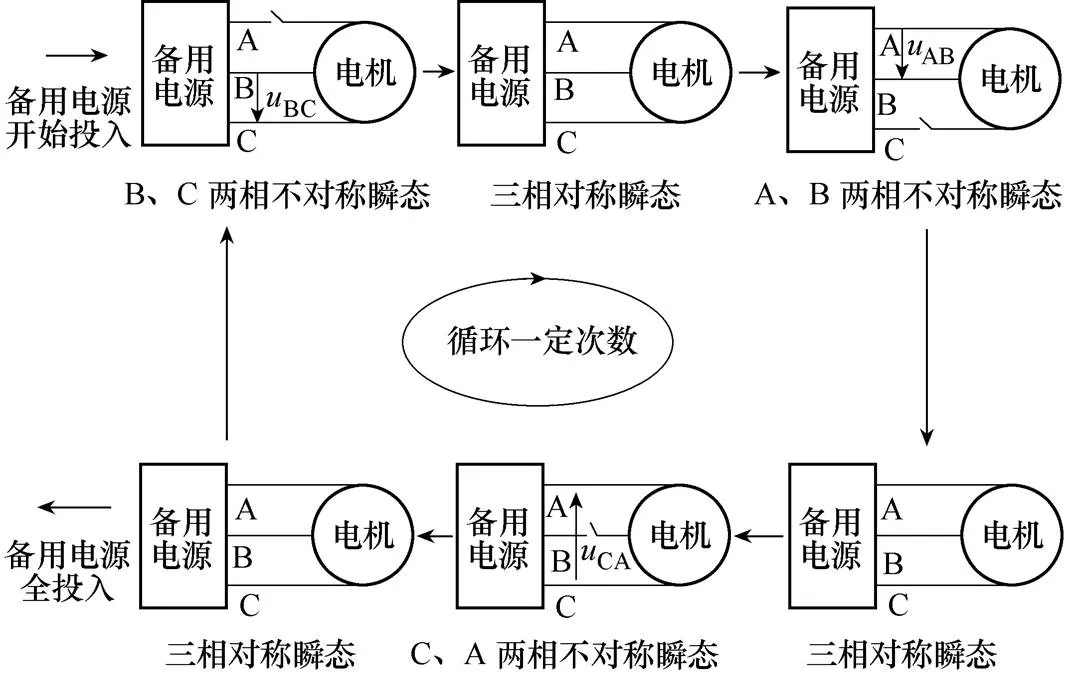
圖3 備用電源投入控制中感應(yīng)電機(jī)運(yùn)行狀態(tài)變化
除控制參數(shù)0和1以外,還存在影響感應(yīng)電機(jī)電源快速切換控制的客觀因素,主要有電機(jī)轉(zhuǎn)速、備用電源投入時(shí)的轉(zhuǎn)子電流以及備用電源與定子殘壓間的相位差。然而,由于所提電源快速切換中感應(yīng)電機(jī)斷電過程較為短暫,大約1~2個(gè)周波,故一般可近似認(rèn)為轉(zhuǎn)子轉(zhuǎn)速不變。在一定轉(zhuǎn)速下,感應(yīng)電機(jī)斷電過程中的轉(zhuǎn)子電流與定子殘壓一一對(duì)應(yīng),但由于斷電時(shí)間短暫,可認(rèn)為定子殘壓幾乎不衰減,近似等于主電源電壓。轉(zhuǎn)子電流大小和相位均取決于斷電瞬間的主電源電壓幅值和相位,因此,在以備用電源電壓為參考時(shí),轉(zhuǎn)子電流對(duì)感應(yīng)電機(jī)電源快速軟切換瞬態(tài)過程的影響最終取決于備用電源與主電源的相位差。
綜上分析可得,為了在不同客觀因素下均能有效抑制電源切換中的瞬態(tài)沖擊,需在已知備用電源與主電源相位差下研究計(jì)算控制參數(shù)0和1,其中相位差是通過互感器測(cè)量得到的,不是本文重點(diǎn),不再細(xì)述。
3 控制參數(shù)的計(jì)算方法
3.1 初始兩相觸發(fā)延遲角a0的計(jì)算
本節(jié)使用感應(yīng)電機(jī)兩相不對(duì)稱瞬態(tài)空間矢量數(shù)學(xué)模型,先求解出定子電流表達(dá)式,然后研究計(jì)算初始兩相不對(duì)稱瞬態(tài)中電流峰值與初始觸發(fā)延遲角0之間的關(guān)系,再根據(jù)電源快速軟切換的限流要求,求出對(duì)應(yīng)的0。
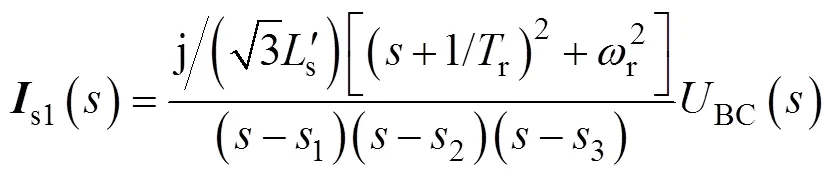
通過分析可知,當(dāng)系統(tǒng)以初始兩相觸發(fā)延遲角0來控制晶閘管SCRB和SCRC導(dǎo)通時(shí),電機(jī)過渡到B、C兩相不對(duì)稱瞬態(tài)階段,該階段的“初值”為轉(zhuǎn)子自由運(yùn)動(dòng)階段的“終值”,由第2節(jié)分析可知,近似認(rèn)為初始兩相不對(duì)稱瞬態(tài)的初值等于電機(jī)斷電瞬間的轉(zhuǎn)子電流值。由文獻(xiàn)[20]可知,恒速下感應(yīng)電機(jī)定子B、C兩相繞組接通電源時(shí)的兩相不對(duì)稱瞬態(tài)空間矢量數(shù)學(xué)模型為
式中,BC為備用電源施加于電機(jī)定子繞組B、C兩相間的線電壓;為定子電流空間矢量;、分別為歸算到定子側(cè)的轉(zhuǎn)子電流空間矢量及其共軛分量;s、s分別為定子每相繞組的電阻和總電感;r、r分別為歸算到定子側(cè)的轉(zhuǎn)子每相繞組的電阻和總電感;m為電機(jī)互感參數(shù);r為轉(zhuǎn)子電角速度;為微分算子,=dd。
其中


1、2和3是一元三次方程
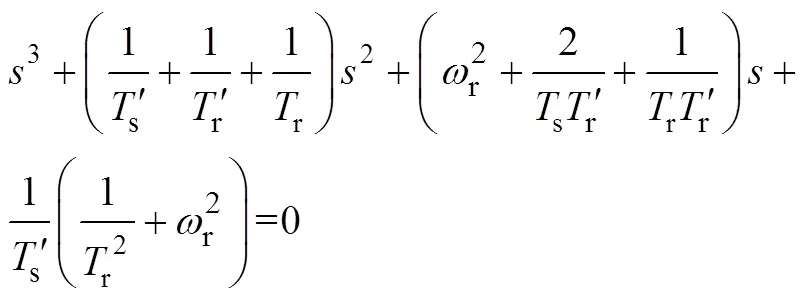
的特征根,可利用卡丹公式[21,22]、牛頓切線法[23]等求得。對(duì)實(shí)驗(yàn)電機(jī)而言,該方程有一個(gè)實(shí)數(shù)根和兩個(gè)共軛復(fù)根,分別記為
則備用電源B、C兩相間線電壓為
對(duì)式(2)進(jìn)行拉普拉斯反變換,可求得定子電流空間矢量的時(shí)域表達(dá)式為
其中
式中,系數(shù)s1k(=1, 2, 3, 4, 5)是由備用電源電壓BC決定的,它們是初始兩相觸發(fā)延遲角0和相位差的函數(shù);而余下系數(shù)則是由該階段轉(zhuǎn)子電流初值決定,即近似由感應(yīng)電機(jī)從主電源斷開瞬間的轉(zhuǎn)子電流值決定,于是,在感應(yīng)電機(jī)斷電位置確定不變時(shí),這些系數(shù)為常數(shù)。
考慮到初始B、C兩相不對(duì)稱瞬態(tài)階段中定子A相電流恒為零,即,則,再根據(jù)空間矢量和三相變量之間的關(guān)系[24,25],并結(jié)合式(6),可求得電源快速軟切換中感應(yīng)電機(jī)初始B、C兩相不對(duì)稱瞬態(tài)中定子電流的表達(dá)式為
由上文分析知,式(8)中的系數(shù)s1k(=1, 2, 3, 4, 5)受0和的影響,其余系數(shù)近似常數(shù)不變,因此該階段中電流波形及其峰值m1由0和決定。當(dāng)相位差確定不變時(shí),通過式(8)可以計(jì)算得到m1與0間的關(guān)系曲線,其結(jié)果如圖4所示。圖4中給出了分別為120°、180°和-120°時(shí)m1和0之間的關(guān)系。若要求該階段電流峰值m1不超過某個(gè)限流值,則可通過圖4所示關(guān)系曲線確定對(duì)應(yīng)的觸發(fā)延遲角0。例如,限流值為6.5A時(shí),三種相位差下的初始觸發(fā)延遲角應(yīng)該分別取60°、92°和113° 左右。
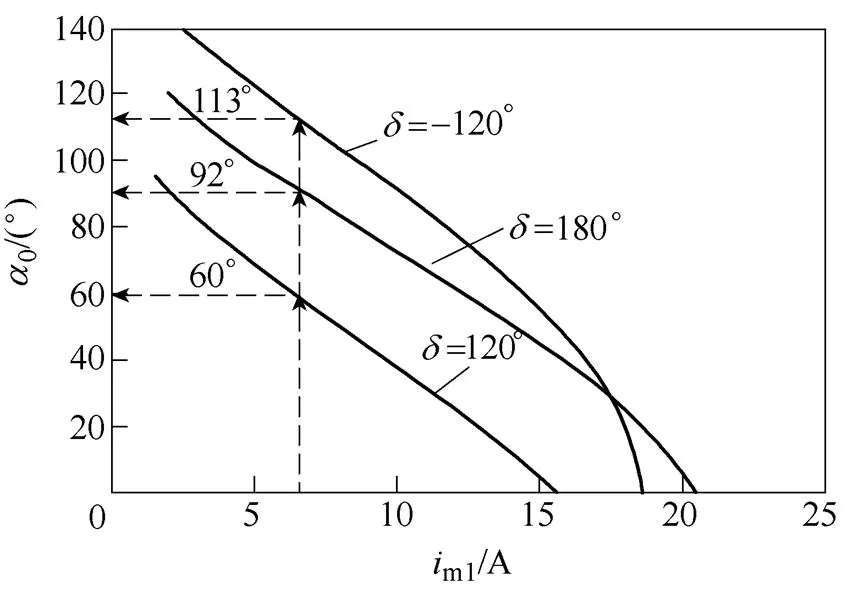
圖4 im1與a0間的關(guān)系曲線
3.2 定子第三相初始觸發(fā)延遲角a1的計(jì)算
由第2節(jié)分析結(jié)果可知,在根據(jù)首半波限流值確定0后,第三相觸發(fā)延遲角1決定“初始三相對(duì)稱瞬態(tài)”及緊隨其后的A、B兩相不對(duì)稱瞬態(tài)中的電流波形及電流峰值。其中A、B兩相不對(duì)稱瞬態(tài)是由于“初始三相對(duì)稱瞬態(tài)”中定子C相繞組電流過零導(dǎo)致晶閘管組SCRC自然關(guān)斷的結(jié)果。該過程持續(xù)到SCRC再次觸發(fā)導(dǎo)通瞬間,由第1節(jié)易知,感應(yīng)電機(jī)這兩個(gè)階段持續(xù)時(shí)間之和為1p/3。本節(jié)采用與2.1節(jié)類似的辦法,使用感應(yīng)電機(jī)對(duì)稱、不對(duì)稱空間矢量數(shù)學(xué)模型,研究計(jì)算這兩個(gè)階段中的電流峰值與1的關(guān)系,再根據(jù)限流值確定對(duì)應(yīng)的1。
由文獻(xiàn)[20,24,25]知,描述感應(yīng)電機(jī)“初始三相對(duì)稱瞬態(tài)”及緊隨其后的A、B兩相不對(duì)稱瞬態(tài)的空間矢量數(shù)學(xué)模型分別為
再根據(jù)后一階段的“初值”等于前一階段的“終值”這一原則來確定這兩個(gè)階段的定、轉(zhuǎn)子電流初值,就可使用與2.1節(jié)類似的辦法求解出定子電流空間矢量時(shí)域表達(dá)式,具體過程略,定子三相電流計(jì)算如下[24,25]。
在初始觸發(fā)延遲角0確定后,可根據(jù)這兩個(gè)階段中所推導(dǎo)的定子電流表達(dá)式,計(jì)算得到不同相位差下的電流峰值m2與第三相觸發(fā)延遲角1間的關(guān)系曲線,其結(jié)果如圖5所示,圖5給出的分別是= 120°、0=60°,=180°、0=92°及=-120°、0= 113°這三種情況下的結(jié)果,由該關(guān)系曲線,可以根據(jù)該階段限流值確定第三相觸發(fā)延遲角1。一般地,要求電源快速軟切換中后續(xù)各階段電流峰值不超過上一階段電流峰值,如該階段電流限流值取6A時(shí),三種情況下的第三相觸發(fā)延遲角1應(yīng)該分別取為 132°、162°和185°左右。
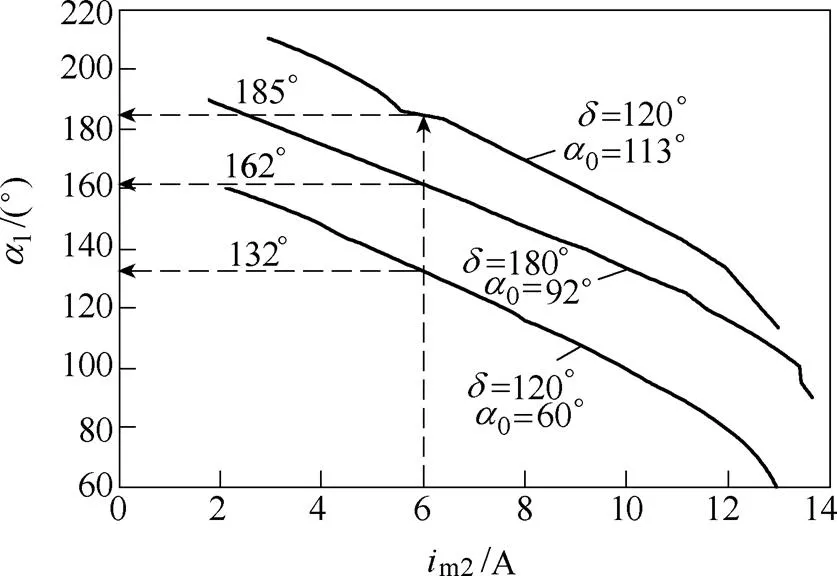
圖5 im2與a1間的關(guān)系曲線
需要說明的是,在根據(jù)電流峰值確定控制參數(shù)0和1時(shí),限流值既不能選得太大,也不能太小,因?yàn)樘笃鸩坏较蘖髯饔茫?huì)導(dǎo)致后續(xù)各階段中電流峰值很大,并超過這兩個(gè)初始階段的電流峰值。研究發(fā)現(xiàn),初始兩階段的限流值一般取為額定電流的1.5倍左右比較合適。
4 感應(yīng)電機(jī)電源快速切換實(shí)驗(yàn)
上文中所給波形都是基于實(shí)驗(yàn)電機(jī)而言的,其為一臺(tái)2.2kW的籠型感應(yīng)電機(jī),在分析過程中將籠型轉(zhuǎn)子等效為繞線式轉(zhuǎn)子,額定電壓為380V,額定電流為4.8A,定、轉(zhuǎn)子每相繞組電阻分別為6.92W、7.36W(折合到定子側(cè)的值),定、轉(zhuǎn)子每相繞組漏電抗均為14.1W,勵(lì)磁電阻為36.3W,勵(lì)磁電抗為486.7W,頻率為50Hz,極對(duì)數(shù)為2,轉(zhuǎn)動(dòng)慣量為0.005kg·m2。
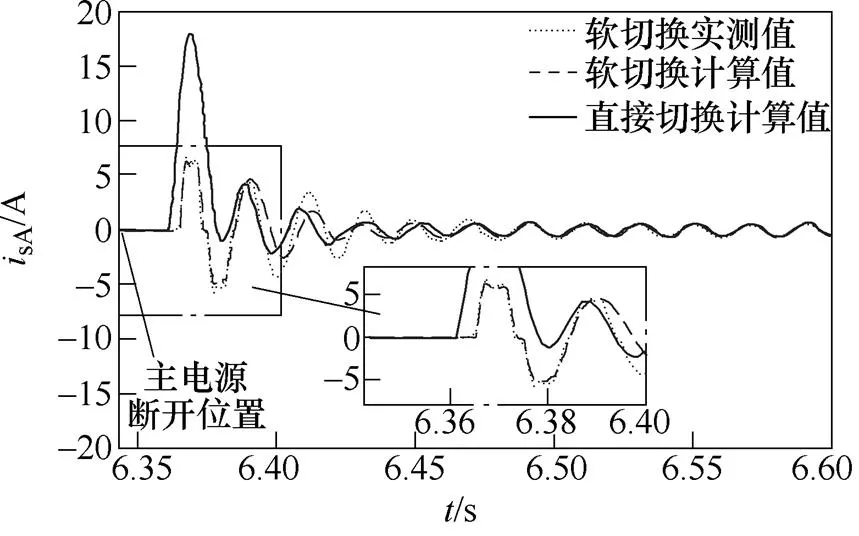
(a)A相電流
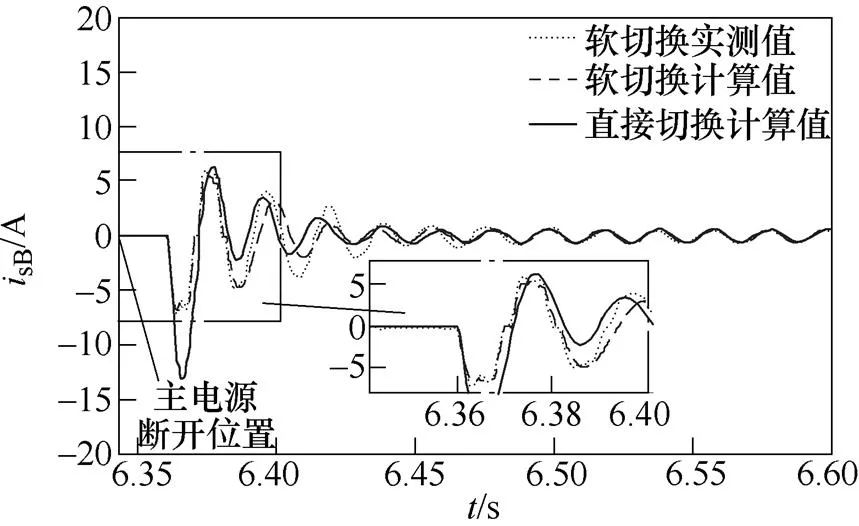
(b)B相電流
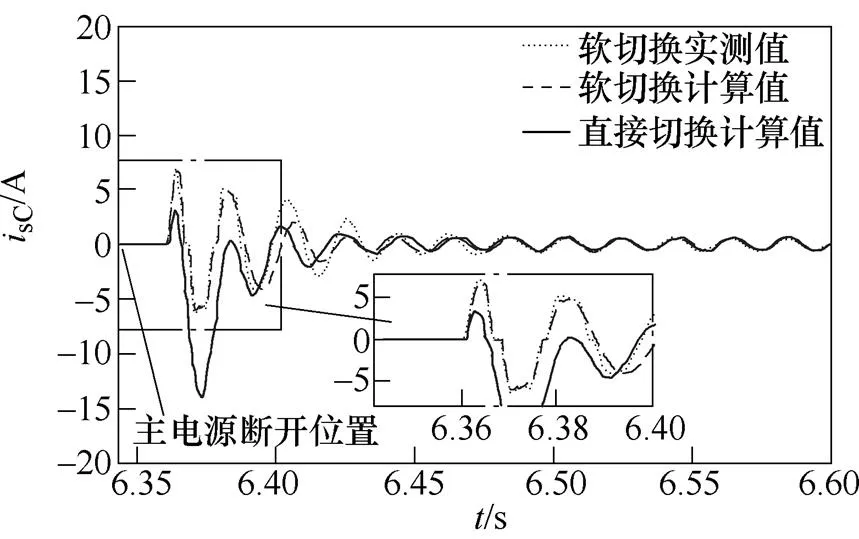
(c)C相電流
圖6=120°時(shí)備用電源投入中定子電流計(jì)算和實(shí)測(cè)結(jié)果
Fig.6 Calculation and test results of the stator currents during the switching of alternate source with=120°
由圖6可見,快速軟切換中定子電流明顯小于直接切換中的電流,說明了所提電源快速軟切換方法能夠有效抑制沖擊電流。感應(yīng)電機(jī)快速軟切換中定子電流計(jì)算結(jié)果與實(shí)測(cè)波形基本一致,驗(yàn)證了所提電源軟切換方法是正確可行的,也說明了控制參數(shù)的計(jì)算是正確的。此外還能夠看出,感應(yīng)電機(jī)電源軟切換能夠在2~3個(gè)周波內(nèi)實(shí)現(xiàn),說明了所提出的電源軟切換方法是非常快速的。
(a)=180°

(b)=-120°
圖7=180°和-120°時(shí)備用電源投入中定子電流實(shí)測(cè)結(jié)果
Fig.7 Test results of the stator currents during the switching of alternate source with=180°and=-120°
5 結(jié)論
通過實(shí)驗(yàn)室小功率感應(yīng)電機(jī)的實(shí)驗(yàn)結(jié)果,驗(yàn)證了本文所提感應(yīng)電機(jī)電源快速切換控制新策略的正確性和可行性,其既能在2~3個(gè)周波內(nèi)快速實(shí)現(xiàn)感應(yīng)電機(jī)的電源切換,又能有效地將瞬態(tài)沖擊電流控制在1.5倍額定值以內(nèi),該方法尤其能夠?qū)崿F(xiàn)備用電源與主電源間相位差較大時(shí)的電源快速軟切換,至于大功率電機(jī)的應(yīng)用效果還需進(jìn)一步研究分析。此外,還在已知備用電源與主電源相位差下,計(jì)算研究了備用電源投入控制過程中參數(shù)與電流峰值之間的關(guān)系,并根據(jù)限流值來確定控制參數(shù)。
所提出的基于SSTS的感應(yīng)電機(jī)電源快速切換控制新策略,不僅賦予了SSTS新的意義,而且豐富了電源軟切換方法體系,能夠與快速切換、同期切換和殘壓切換這三種常見電源切換方式配合使用,更完善地解決了感應(yīng)電機(jī)電源切換中的瞬態(tài)沖擊問題,為實(shí)際生產(chǎn)提供理論參考和指導(dǎo),具有工程應(yīng)用價(jià)值。
參考文獻(xiàn)
[1] Goswami A K, Gupta C P, Singh G K. Voltage sag assessment in a large chemical industry[J]. IEEE Transactions on Industry Applications, 2012, 48(5): 1739-1746.
[2] 王煥文. 艦船電力系統(tǒng)及自動(dòng)裝置[M]. 北京: 科學(xué)出版社, 2004.
[3] Hornak D L, Zipse D W. Automated bus transfer control for critical industrial processes[J]. IEEE Transactions on Industry Applications, 1991, 27(5): 862-871.
[4] 王璐, 周海瀟, 羅建, 等. 感應(yīng)電動(dòng)機(jī)電源切換的UPS逆變器控制策略[J]. 電力系統(tǒng)保護(hù)與控制, 2014, 42(24): 49-55.
Wang Lu, Zhou Haixiao, Luo Jian, et al. Control strategy of UPS for the induction motor[J]. Power System Protection and Control, 2014, 42(24): 49-55.
[5] Balamourougan V, Sidhu T S, Kasztenny B, et al. Robust technique for fast and safe transfer of power plant auxiliaries[J]. IEEE Transactions on Energy Conversion, 2006, 21(2): 541-551.
[6] Pettigrew R D, Powell P, Burnworth J, et al. Motor bus transfer[J]. IEEE Transactions on Power Delivery, 1993, 8(4): 1747-1758.
[7] 崔學(xué)深, 張自力, 李和明, 等. 感應(yīng)電機(jī)電源切換中殘壓和電壓差的研究及最優(yōu)切換策略[J]. 電工技術(shù)學(xué)報(bào), 2015, 30(2): 162-171.
Cui Xueshen, Zhang Zili, Li Heming, et al. Residual voltage, voltage difference and optimal switching strategy during the power switching of induction motors[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 162-171.
[8] Tian Bing, Mao Chengxiong, Lu Jiming, et al. 400V/ 1000kV·A hybrid automatic transfer switch[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5422-5435.
[9] Beckwith T R, Hartmann W G. Motor bus transfer: considerations and methods[J]. IEEE Transactions on Industry Applications, 2006, 42(2): 602-611.
[10] Higgins T A, Snider W L, Young P L, et al. Report on bus transfer I assessment and application[J]. IEEE Transactions on Energy Conversion, 1990, 5(3): 462- 469.
[11] Higgins T A, Young P L, Snider W L, et al. Report on bus transfer II computer modeling for bus transfer studies[J]. IEEE Transactions on Energy Conversion, 1990, 5(3): 470-476.
[12] Young P L, Snider W L, Higgins T A, et al. Report on bus transfer III full scale testing and evaluation[J]. IEEE Transactions on Energy Conversion, 1990, 5(3): 477-484.
[13] 高雅, 劉衛(wèi)國(guó), 駱光照. 大慣量負(fù)載永磁同步電機(jī)斷電-尋優(yōu)重投控制系統(tǒng)[J]. 電工技術(shù)學(xué)報(bào), 2014, 29(5): 62-69.
Gao Ya, Liu Weiguo, Luo Guangzhao. A large inertia load PMSM power down-rejoining on optimizing control system[J]. Transactions of China Electro- technical Society, 2014, 29(5): 62-69.
[14] Young C C, Dunki-Jacobs J. The concept of in-phase transfer applied to industrial systems serving essential service motors[J]. American Institute of Electrical Engineers, Part II: Transactions of the Applications and Industry, 1961, 79(6): 508-518.
[15] Kelly A R. Relay response to motor residual voltage during automatic transfers[J]. American Institute of Electrical Engineers, Part II: Transactions of the Applications and Industry, 1955, 74(4): 245-252.
[16] 王松岑, 湯廣福, 于坤山, 等. 新型中壓固態(tài)切換開關(guān)的研究[J]. 電網(wǎng)技術(shù), 2006, 30(增): 311-315.
Wang Songcen, Tang Guangfu, Yu Kunshan, et al. Development of a novel medium voltage solid state transfer switch[J]. Power System Technology, 2006, 30(S): 311-315.
[17] 崔學(xué)深, 羅應(yīng)立, 周振華, 等. 感應(yīng)電動(dòng)機(jī)的電源快速軟投入技術(shù)及其初始瞬態(tài)解析[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2009, 29(6): 93-99.
Cui Xueshen, Luo Yingli, Zhou Zhenhua, et al. Rapid soft re-switching technique of three-phase induction motors and its initial transient analytical method[J]. Proceedings of the CSEE, 2009, 29(6): 93-99.
[18] 吳玲. 感應(yīng)電機(jī)在電源切換時(shí)分相投入控制的理論研究[D]. 北京: 華北電力大學(xué), 2009.
[19] 李衛(wèi)國(guó), 崔學(xué)深, 羅應(yīng)立, 等. 感應(yīng)電機(jī)快速投入控制參數(shù)的解析[J]. 電工技術(shù)學(xué)報(bào), 2013, 28(3): 154-160.
Li Weiguo, Cui Xueshen, Luo Yingli, et al. Analytical method on control parameter of quick switching on induction motor load[J]. Transactions on China Electrotechnical Society, 2013, 28(3): 154-160.
[20] 李和明, 張自力, 崔學(xué)深, 等. 晶閘管-電動(dòng)機(jī)系統(tǒng)不對(duì)稱瞬態(tài)建模及解析[J]. 電工技術(shù)學(xué)報(bào), 2013, 28(8): 241-249.
Li Heming, Zhang Zili, Cui Xueshen, et al. Asymmetrical transient modeling and analytical research of SCR-motor systems[J]. Transactions of China Electrotechnical Society, 2013, 28(8): 241- 249.
[21] 崔學(xué)深. 感應(yīng)電機(jī)電源軟投入相關(guān)理論及節(jié)能控制新技術(shù)的研究[D]. 北京: 華北電力大學(xué), 2009.
[22] 馬明. 塔塔利亞與三次方程的故事[J]. 數(shù)學(xué)史話, 2001 (27): 14-16.
Ma Ming. The story of Tatalia and the cubic equation[J]. Myth of Mathematics, 2001(27): 14-16.
[23] 羅煒, 崔學(xué)深, 羅應(yīng)立. 感應(yīng)電機(jī)不對(duì)稱暫態(tài)分析中一類一元三次特征方程及其近似求解[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2008, 28(27): 126-130.
Luo Wei, Cui Xueshen, Luo Yingli. Approximate solutions of a class of cubic characteristic equations in asymmetric transient analysis of induction machines[J]. Proceedings of the CSEE, 2008, 28(27): 126-130.
[24] Novotny D W, Lipo T A. Vector control and dyna- mics of AC drives[M]. New York: Clarendon Press Oxfard, 1996.
[25] Krause P C, Wasynczuk O, Sudhoff S D. Analysis of electric machinery and drive systems[M]. New York: Wiley-IEEE Press, 2002.
Novel Rapid Power Switching Strategy and Its Parameter Calculation of Induction Motor-Load Based on Solid State Transfer Switch
12113
(1. School of Electrical and Electronic Engineering North China Electric Power University Beijing 102206 China 3. State Grid Handan electric Power Supply Company Handan 056002 China 2. State Grid Heibei Cheng’an Electric Power Company Cheng’an 056700 China)
As an important load of naval vessels, electric plants and steel plants, induction motor should be switched rapidly from main source to alternative source after its power outages. However, the transient inrush produced by such dynamic load under the adverse conditions would have serious consequences. Accordingly, a novel rapid power switching control strategy of induction motor load was proposed based on solid state transfer switch (SSTS) in this paper. The proposed strategy could not only rapidly transfer the critical load from main source to alternative source, but also effectively suppress the transient inrush under the condition of the various phase-angle differences between the two sources. Then, the complex transient of induction motor during the switching control process of the alternative source was analyzed. And the main factors affecting the suppression of the transient inrush were discussed. Besides, the relationship between control parameters and current peak values was explained when the phase-angle difference between the two sources was known. The control parameters could be obtained by the requirement of the current-limit suppression. Finally, the calculation and test results of the stator currents verified that the proposed rapid power switching strategy and the parameters calculation were correct and effective.
Novel rapid power switching strategy, solid state transfer switch, control parameters, current limit, induction motor
TM32;TM346
崔學(xué)深 男,1973年生,副教授,主要研究方向?yàn)榻涣麟姍C(jī)過渡過程分析與控制。
E-mail: cxs@ncepu.edu.cn
張自力 男,1985年生,博士研究生,主要研究方向?yàn)殡娫纯焖佘浲度搿④浨袚Q和交流電機(jī)過渡過程分析與控制等。
E-mail: zhangzili@ncepu.edu.cn(通信作者)
2015-08-12 改稿日期 2016-01-02
中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(13XS06)和國(guó)家自然科學(xué)基金(51077048)資助項(xiàng)目。