氣囊支撐浮筏隔振系統姿態控制研究
2016-11-04 12:35:35吳金波張松魁
艦船科學技術 2016年9期
吳金波,張松魁
(華中科技大學 船舶與海洋工程學院,湖北 武漢 430074)
氣囊支撐浮筏隔振系統姿態控制研究
吳金波,張松魁
(華中科技大學 船舶與海洋工程學院,湖北 武漢 430074)
將氣囊隔振器應用于艦船浮筏隔振裝置,通過控制氣囊充、排氣可實現浮筏的姿態調整。目前以氣囊工作高度為指標的控制方法,存在各個氣囊壓力分布不均和調節過程振蕩的問題,針對該問題提出一種基于氣囊工作高度、實際壓力與最優壓力偏差的浮筏姿態控制策略。將調整分為高度調整和水平姿態調整2個階段:首先采用模糊控制快速將輸出軸調整到對中高度,然后以"高排低充"的策略精確調整浮筏水平姿態。試驗結果表明,該控制策略能更加快速、平穩、精確地調整浮筏姿態。
氣囊;浮筏;隔振;姿態調整;模糊控制
0 引 言
減小動力裝置的機械振動能夠提高艦船隱身性能和改善機艙工作環境,浮筏隔振裝置是一種有效的隔振降噪系統,目前已經大量應用到艦船動力裝置和其他機械設備的減振降噪中。氣囊隔振器具有固有頻率低、穩定性高、承載能力大等特點[1-2],以氣囊代替傳統浮筏隔振裝置中的橡膠隔振器能顯著提高艦船的減振降噪能力,俄羅斯已經研制了潛艇的氣囊支撐浮筏隔振系統,近幾年國內相關研究也取得重要進展[3,4]。
氣囊的緩慢漏氣、外界擾動等會導致浮筏產生傾斜,因此需要采取一定的主動控制策略對氣囊進行充、排氣,調整浮筏姿態以滿足軸系對中的要求[5]。文獻[4]針對柴油發電機六氣囊隔振裝置提出一種具有代表性的控制方法:基于氣囊的高度檢測,選擇高度低于額定值且偏差最大的2個氣囊,對其中壓力最小的進行充氣,實現姿態調整。該方法僅以高度為基準選取氣囊,會造成調整結束后氣囊載荷分配不均勻,并且由于采取了連續的充氣策略,導致超調量過大,調整過程中存在嚴重振蕩。
為了進一步提高軸系對中精度和浮筏姿態調整的平穩性,本文提出一種基于氣囊的高度、實際壓力與最優壓力偏差的浮筏姿態控制策略。首先,對大載荷浮筏隔振系統進行分析,通過氣囊狀態、位置和浮筏重心求解得到氣囊的最優壓力;然后,將調整分為高度調整和水平姿態調整2個階段,在高度調整階段,根據氣囊的高度、實際壓力與最優壓力偏差綜合指標函數選取氣囊,采用模糊控制確定氣囊充排氣時間,快速達到對中高度,在水平姿態調整階段度,采用“高排低充”的方法對浮筏姿態進行精確調整。最后在浮筏隔振系統試驗平臺上進行驗證。
1 系統結構和超靜定問題分析
某型船舶主動力浮筏隔振裝置的示意圖如圖1所示,8個氣囊沿 Y 軸對稱垂向布置且均裝有壓力傳感器,另有8個位移傳感器,6個測量浮筏平臺垂向位移,其余2個安裝于聯軸節處,分別檢測輸出軸位置的垂向、橫向位移。建立固連于浮筏的右手坐標系 OXYZ,坐標系原點 O 與浮筏重心重合,Y 軸與輸出軸軸心平行。
在姿態調整過程中各個氣囊的工作高度基本相同,根據相關文獻研究[6-7],可認為在調整過程中氣囊內部壓力與垂向位移滿足線性關系。氣囊的承載力為[8]:

式中:Pi為氣囊壓力,MPa;Sei為有效承壓面積,μ2;Pu為氣囊壓力上限。
由氣囊繞 X、Y 軸的力矩平衡和沿Z軸的受力平衡可以列出3個方程:
式中:Fi為各個氣囊的支撐力,N;G 為浮筏的自重,N;n 為氣囊個數。
由式(1)和式(2)可得,n >3時,Pi有無數解,此系統屬于超靜定系統;n ≥ 2時,各個氣囊之間存在耦合,其表現為任何一個氣囊的壓力、高度發生改變均能引起所有氣囊變化,浮筏的姿態相應改變[9]。因此氣囊浮筏隔振平臺是一個超靜定、多變量的耦合系統,從氣囊的工作壽命和安全性考慮,增加氣囊壓力均勻性這一約束條件,要求各個氣囊壓力的方差取最小值,即

通過式(2)~式(4)即可實現氣囊壓力求解的超靜定問題向靜定的轉化,得到各個氣囊的最優控制壓力為:

式中 Psi為氣囊最優控制壓力,MPa。
2 控制器設計
傳統的流體控制方法主要針對大流量、大體積的流量和壓力控制。由于氣囊隔振器的容積通常較小(本系統中僅為20 L),屬于小流量、小體積的氣動控制系統,且受電磁閥的工藝限制,傳統的流體控制方法不適用于本系統,因此,采用斷續控制方法對氣囊進行短時間充、排氣,達到姿態調整的目的。
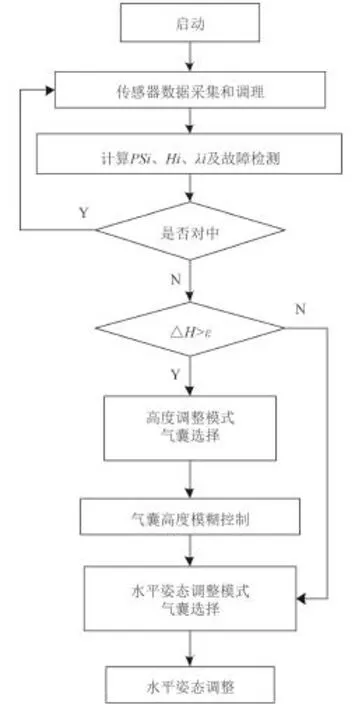
圖2 浮筏姿態控制原理圖Fig. 2 Flow diagram of the attitude control for floating raft
系統的控制原理如圖2所示。首先檢查浮筏姿態是否滿足對中要求,若未對中則進行姿態調整控制。整個調整過程包括浮筏高度調整和水平姿態調整2個階段。在浮筏高度調整階段,基于氣囊高度和氣囊壓力偏差綜合指標函數的設計了氣囊選擇控制器,采用模糊控制確定指定氣囊充、排氣時間,使輸出軸位置快速逼近對中高度;在浮筏水平姿態調整階段,使用“高排低充”的氣囊充、排氣控制策略,對浮筏姿態進行精確調整。
為了簡化控制器的設計和試驗分析,提出以下假設:1)浮筏為剛體;2)輸出軸沒有扭矩輸出;3)船體處于水平狀態,沒有縱傾和橫傾。
2.1浮筏的高度調整控制器
1)氣囊選擇策略
由于各個氣囊之間存在耦合,其高度和壓力均受其他氣囊影響,例如相鄰的2個氣囊,高度較高的氣囊壓力較低,高度較低的氣囊反而壓力較大,此時若僅以高度為指標選擇氣囊則會對壓力較高的氣囊再次充氣,進一步造成氣囊之間壓力分布不均,對氣囊的工作壽命造成不利影響。因此,針對高度調整階段本文提出了以氣囊壓力和高度綜合指標為判據的氣囊選擇控制策略,最大限度地排除氣囊耦合對于高度控制的影響。判據的形式為:

式中:Qi為高度偏差綜合指標,mm;K 為高度隨最優壓力比例 λi的變化率,mm;λi為實際壓力與最優壓力比例,λ 為λi的平均值,無量綱。
Qi的實際意義為氣囊考慮耦合因素后的廣義高度差,能夠較好地反映氣囊與理想對中狀態時的偏差。基于各個氣囊的廣義高度差 Qi可以設計出如下的氣囊選擇策略:首先,判斷輸出軸實際高度 Hs與指令對中高度 Ho是否在允許誤差范圍內,確定是否進行高度調整;然后,計算各個氣囊的廣義高度差,若且則對第 i 號氣囊充氣,若且則對第 i 號氣囊排氣。氣囊選擇原理框圖如圖3所示。
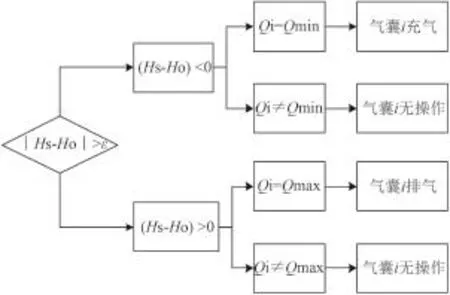
圖3 高度調整氣囊選擇原理框圖Fig. 3 Air spring selection principle in height adjustment stage
2)充氣時間模糊控制器
由流體力學理論可知,當 P氣源≥ 1.893P氣囊時,氣體以超音速流向氣囊,此時流量很大;當 P氣源<1.893P氣囊時,氣體處于亞音速流動,此時流量相對較小[10]。相同充氣時間內氣囊壓力改變量差異較大,為保證在流量變化時氣囊高度調整的準確性,在設計控制器時需要考慮氣囊壓力與氣源壓力差。本系統為多輸入多輸出的復雜控制對象,加之系統采取斷續控制的方法,傳統的控制方法難以獲得期望的控制效果[11],因而本文采用模糊控制策略,以氣囊的廣義高度差 Qi和氣囊壓力與氣源壓力差 ΔP 為輸入量,ΔP=Pi-P氣源(排氣時 P氣源為0)確定氣囊單次充、排氣時間,從而快速、精確調整浮筏姿態。
Qi,ΔP,T 的物理論域分別為{-3,3},{-1.2,1.2},{0,200},偏差變量 Qi、ΔP 的模糊集論域均為{-3,3},分別表示 {負大,負中,負小,零,正小,正中,正大},用 {NB,NM,NS,ZE,PS,PM,PB}代替。電磁閥開啟時間 T 模糊集論域為{0,4},分別表示 {零,短開,中開,長開,超長開},用 { ZE,PS,PM,PB,PG,} 代替,由于排氣管路背壓為0 MPa,排氣時取短開和中開。得出量化因子 KQi=1,KΔP=2.5,KT=50,根據三角形隸屬函數和實際調試經驗設計模糊控制規則表,如表1所示。
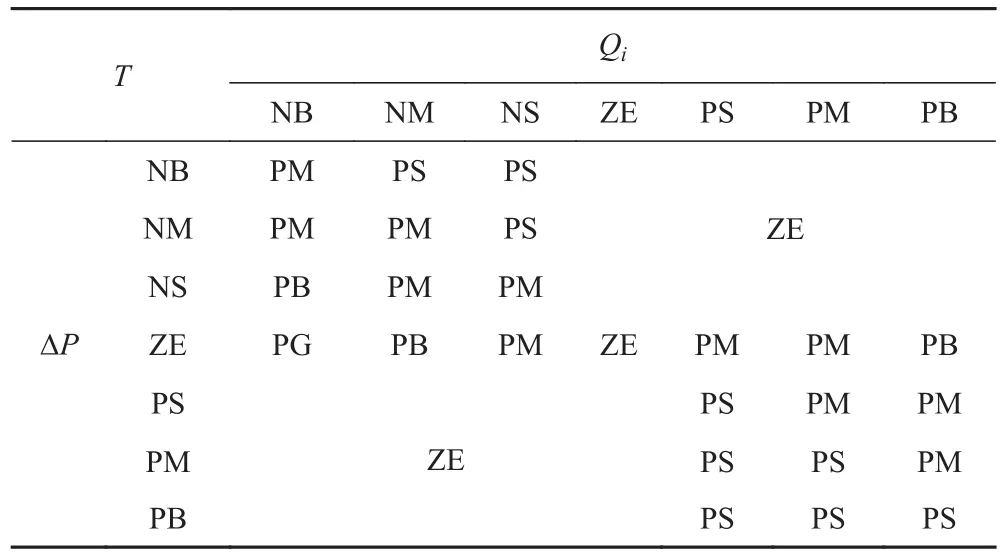
表1 模糊規則表Tab. 1 Fuzzy rule of T
2.2浮筏的水平姿態調整控制器
浮筏高度調整結束后,輸出軸高度與指令對中高度在允許誤差范圍內,但浮筏可能存在一定的傾斜,造成軸承受力不均并引起軸系振動,因此需要進一步進行水平姿態調整。這里采用“高排低沖”的策略,將8個氣囊分為4個象限,根據幾何關系計算4個象限中心的高度 Hxn,若 Hs-Ho<0則選定高度最低的象限,然后對象限內最優壓力比例較小的氣囊充氣;反之,若 Hs-Ho>0則選定高度最高的象限,然后對象限內最優壓力比例較大的氣囊排氣。在調整過程中,各個氣囊的高度均在指令對中高度附近,采用短時充、排氣即可快速將浮筏調整到水平姿態。氣囊選擇原理框圖如圖4所示:
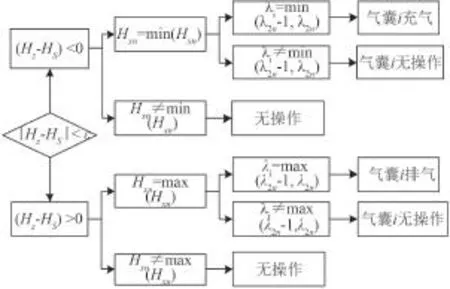
圖4 姿態調整氣囊選擇原理框圖Fig. 4 Air spring selection principle in horizontal attitude adjustment stage
3 實驗研究
本文提出的控制策略在某型船舶主動力浮筏隔振系統試驗平臺上進行試驗驗證。浮筏平面尺寸大約為7.80 m × 8.42 m,質量約為180 t。控制器為BACKHOFF PAC 控制器(TWINCAT3),系統運行周期為10 ms。系統實時根據氣囊狀態和浮筏重量計算出一組最優壓力,并傳送到邏輯控制程序,開啟電磁閥對選擇的氣囊進行充、排氣,系統氣路原理如圖5所示。

圖5 系統氣路原理Fig. 5 Pneumatic system diagram
初始狀態為各個氣囊壓力接近0 MPa,此時浮筏隔振平臺落在支撐底座上,軸系高度低于對中高度。在各個氣囊無氣時,為達到快速調整的目的,選擇最優壓力比例最小的氣囊單次充氣500 ms,各個氣囊最優壓力比例均大于 0.5 后進行試驗;在調整過程中,為減小浮筏振蕩產生的干擾,設置相臨2次的充、排氣間隔為5 s;終止狀態為將浮筏隔振平臺調整到對中高度,調整精度 ε=0.1 mm。在主機靜止的狀態下,分別采用本文所述控制策略與現有控制策略做了對比試驗,試驗結果如圖6~圖8所示。
對比圖6~圖7可以看出,采用本文所述的控制策略從開始調整至達到對中精度所用時間約為300 s,而采用文獻[4]所述控制策略所用時間約為380 s;在調整過程中,浮筏姿態的振蕩幅度明顯小于對比試驗。從圖8可看出,本文的控制策略能夠使氣囊的壓力更接近于最優壓力分布。
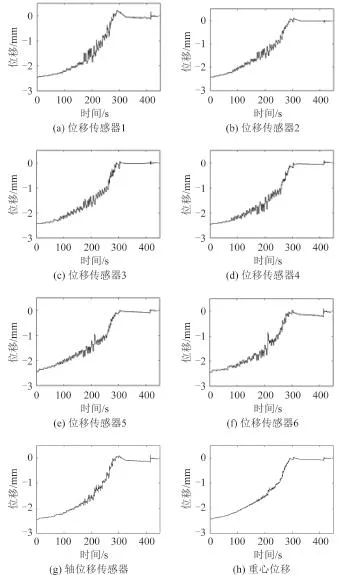
圖6 采用本文所述控制策略的試驗結果曲線Fig. 6 Test curves of the control strategy proposed in this paper
4 結 語
本文研究了氣囊支撐浮筏隔振平臺的姿態控制策略,針對調整過程中的平穩性和氣囊壓力分布問題,設計了基于氣囊的高度、實際壓力與最優壓力偏差的浮筏姿態控制策略,通過將調整過程分為2個階段,實現了浮筏輸出軸的快速對中和浮筏姿態的精確控制。試驗結果表明,該控制策略與其他方式相比,姿態調整時間縮短了 20% 以上,同時調整過程的平穩性得到大幅提高。
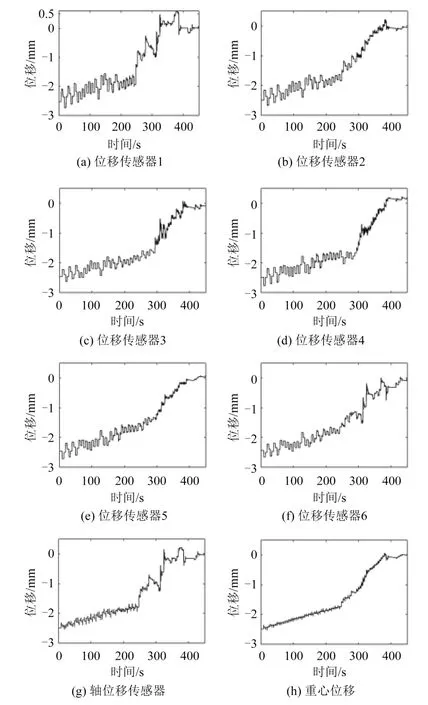
圖7 采用文獻[4]控制策略的試驗結果曲線Fig. 7 Test curves of the control strategy proposed in reference [4]
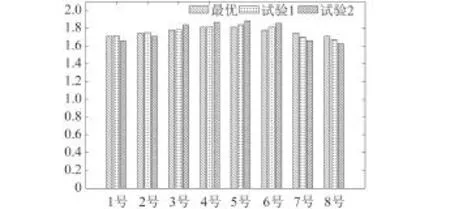
圖8 氣囊的最優壓力與試驗壓力對比圖Fig. 8 Comparison histogram of air spring's optimal and test pressure
[1]徐偉, 何琳, 呂志強, 等. 船舶主機氣囊隔振系統動態特性分析[J]. 振動與沖擊, 2007, 26(7): 122-124. XU Wei, HE Lin, LV Zhi-qiang, et al. Dynamic analysis of an air spring mounting system for marine main engine[J]. Journal of Vibration and Shock, 2007, 26(7): 122-124.
[2]劉增華. 鐵道車輛空氣彈簧動力學特性及其主動控制研究[D]. 成都: 西南交通大學, 2007. LIU Zeng-hua. Study on the dynamics characteristic and active control of air spring on railway vehicle[D]. Chengdu:Southwest Jiaotong University, 2007.
[3]何琳, 趙應龍. 艦船用高內壓氣囊隔振器理論與設計[J]. 振動工程學報, 2013, 26(6): 886-894. HE Lin, ZHAO Ying-long. Theory and design of high-pressure and heavy-duty air spring for naval vessels[J]. Journal of Vibration Engineering, 2013, 26(6): 886-894.
[4]卜文俊, 單樹軍, 胡宗成. 基于模糊控制的超靜定、多變量耦合空氣彈簧隔振系統姿態控制[J]. 振動與沖擊, 2007,26(11): 174-177. BU Wen-jun, SHAN Shu-jun, HU Zong-cheng. Attitude control of statically indeterminate and multivariable coupling air spring vibration isolation system based on fuzzy contrller[J]. Journal of Vibration and Shock, 2007, 26(11): 174-177.
[5]施亮, 何琳, 徐偉, 等. 船舶主機氣囊隔振裝置的對中可控性[J]. 海軍工程大學學報, 2011, 23(5): 27-30, 35. SHI Liang, HE Lin, XU Wei, et al. Alignment controllability of ship main engine air suspension system[J]. Journal of Naval University of Engineering, 2011, 23(5): 27-30, 35.
[6]NIETO A J, MORALES A L, GONZáLEZ A, et al. An analytical model of pneumatic suspensions based on an experimental characterization[J]. Journal of Sound and Vibration, 2008,313(1/2): 290-317.
[7]戚壯, 李芾, 黃運華, 等. 高速動車組空氣彈簧垂向動態特性研究[J]. 機械工程學報, 2015, 51(10): 129-136. QI Zhuang, LI Fu, HUANG Yun-hua, et al. Study on the vertical dynamic characteristics of air spring used in high-speed EMU[J]. Journal of Mechanical Engineering, 2015, 51(10):129-136.
[8]張亞洲. 船舶推進裝置-氣囊隔振系統校中特性研究[D]. 西安: 西安科技大學, 2013. Zhang Ya-zhou. The study of the marine propulsion system alignment with air spring vibration isolation system[D]. Xi'an:Xi'an University of Science and Technology, 2013.
[9]呂志強, 施亮, 趙應龍. 氣囊浮筏隔振裝置姿態控制問題[J].振動與噪聲控制, 2013, 33(1): 40-43. LV Zhi-qiang, SHI Liang, ZHAO Ying-long. Attitude control of air spring raft isolation system[J]. Noise and Vibration Control, 2013, 33(1): 40-43.
[10]許福玲, 陳堯明. 液壓與氣壓傳動[M]. 2版. 北京: 機械工業出版社, 2004. XU Fu-ling, CHEN Xiao-ming. Hydraulic and pneumatic transmission[M]. 2nd ed. Beijing: China Machine Press, 2004.
[11]師黎, 陳鐵軍, 李曉媛, 等. 智能控制理論及應用[M]. 北京:清華大學出版社, 2009. SHI Li, CHEN Tie-jun, LI Xiao-yuan, et al. Intelligent control theory and its application[M]. Beijing: Tsinghua University Press, 2009.
Research on attitude control of floating raft vibration-isolation system with air spring
WU Jin-bo, ZHANG Song-kui
(School of Naval Architecture and Ocean Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
Air springs are equipped on ship floating raft vibration isolation system, and the attitude adjustment of floating raft can be realized by controlling the air bag charging and discharging. To solve the control problem of pressure distribution and raft oscillating in the course of raft's attitude adjustment, an control strategy is proposed based on air spring's height and press, which contains two stages: first, output shaft alignment is achieved using fuzzy control; then, using a strategy of 'high-discharge or low-charge' to adjust the horizon attitude precisely. Tests are carried out to verify the efficacy of this strategy, and the test results indicate that the designed control system is effective.
air spring;floating raft;vibration isolation;attitude adjustment;fuzzy control
TP273
A
1672-7619(2016)09-0049-05
10.3404/j.issn.1672-7619.2016.09.009
2016-04-27
國家自然科學基金資助項目(50909046)
吳金波(1974-),男,副教授,研究方向為艦船運動仿真、水下機器人的操作與控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26