惡劣海況下船舶電力推進系統抗過旋控制研究
2016-11-04 12:35:42汪桐萱梁景凱曲延濱
艦船科學技術 2016年9期
汪桐萱,任 倩,梁景凱,曲延濱
(哈爾濱工業大學(威海)信息與電氣工程學院,山東 威海 264209)
惡劣海況下船舶電力推進系統抗過旋控制研究
汪桐萱,任倩,梁景凱,曲延濱
(哈爾濱工業大學(威海)信息與電氣工程學院,山東 威海 264209)
電力推進的船舶在惡劣海況下航行時存在較大擾動,螺旋槳不斷進出水面,使船舶推進電機的轉速和轉矩過大從而造成機械損耗。為此,本文提出一種針對惡劣海況的船舶電力推進系統抗過旋控制策略,不同于平靜海況的轉速控制策略,考慮船槳通風狀態以及損失的估算,對損失因子和估算轉矩進行分析,驗證抗過旋控制的可靠性。
船舶電力推進;惡劣海況;抗過旋控制;損失計算
0 引 言
電力推進是現代船舶推進方式之一,通過電動機直接或經減速齒輪裝置帶動螺旋槳推動船舶行進,目前已成為一種先進的推進方式[1]。而推進電機及其控制技術是船舶電力推進的關鍵技術之一,由于推進電機受外部負載擾動、對象建模不充分和非線性動態等不確定因素的影響,要獲得高性能的轉速控制系統,必須由先進的控制策略來解決這些不確定因素的影響。目前,常用的控制船舶推進系統的方法有模糊控制方法、神經元自適應 PID 方法、復合誤差模型自適應方法等。模糊控制魯棒性強,但是模糊控制屬于有差控制,靜態性能不夠穩定。神經元自適應 PID 控制是一種與矢量控制相結合的控制方法,此控制方法有較好的自適應能力,抗干擾性能較好[2]。復合誤差模型自適應方法的主要優點是具有很好的自適應性和穩定性[3-5]。
這些方法在一定程度上解決了不確定性對控制性能的影響,提升了系統抗干擾的能力。但當船舶遭遇惡劣海況時,螺旋槳會出現不斷進出水面的情況,導致螺旋槳經歷一個很大的負載瞬時變化,產生過大的轉矩和轉速,快速旋轉的槳葉撞擊水面,會導致機械傳動機構損壞和槳葉的損壞,產生不必要的經濟損失。只有適時根據海況調整控制策略,才能更好地解決所述的螺旋槳機械動態失衡問題。
鑒于目前針對船舶電力推進系統遭遇惡劣海況時的控制策略研究相對較少,本文提出一種惡劣海況下的船舶電力推進系統抗過旋控制策略,該控制方法能夠有效抑制螺旋槳失載時螺旋槳飛車,保障推進傳動系統的動態平衡,減少推進單元的機械損耗,有效實現船舶在惡劣海況中的安全平穩推進。
1 船舶電力推進系統模型建立
1.1船槳模型
螺旋槳特性是指螺旋槳轉矩、功率與轉速之間的關系曲線與槳的轉動方向和水流入方向有關系。根據螺旋槳工作原理,螺旋槳實際推力、轉矩分別與轉速的關系為:

式中:KF為推力系數;KT為轉矩系數;ρ 為海水密度;D 為螺旋槳直徑;n 為軸的轉速。
1.2軸動態模型
連接電機和螺旋槳軸的轉矩平衡方程為:

式中:Tmp為軸上的電機轉矩;Is為軸、螺旋槳、電機的轉動慣量;ω 為軸的角速度;f(ω)為軸的摩擦力。
軸的摩擦力方程為:

式中:Kω為摩擦系數;Ts為靜摩擦轉矩常數。
1.3電機模型
永磁同步電動機具有磁通密度高、動態響應快、嚴格的轉速同步性、更硬性的轉速特性等優點,因此目前船舶電力推進系統大多采用永磁同步電動機作為推進電機[6-7]。
電機動態模型方程為:

式中:Tm為電機的轉矩;tm為時間常數;Tcm為推進系統中電機需要的轉矩。
2 惡劣海況下船舶電力推進系統抗過旋控制策略研究
2.1平靜海況下船舶電力推進系統控制策略
平靜海況下電力推進系統轉速控制結構 如圖1所示。
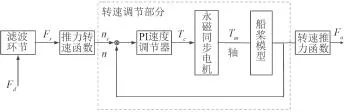
圖1 平靜海況下轉速控制結構Fig. 1 Block diagram of shaft speed control in normal condition
平靜海況是指船舶在平靜的水面航行,螺旋槳全部浸沒在海水里,不存在浪、流、涌等因素。Fr是 Fd通過一個濾波環節給定的理想的推力值,Fd是給定的一個常值。
2.1.1控制的基本參數
經過分析可知,軸的轉速 ω 與電機的轉矩 Tm可以實際測得。最基本的控制參數為螺旋槳的直徑 D、推力系數 KF和轉矩系數 KT,這 3個參數,可從船舶的推力或螺旋槳的敞水特性求出。對于此控制系統,靜摩擦轉矩常數 Ts、摩擦系數 Kω和轉動慣量 Is都為理想值。Ts與 Kω的值在確定控制系統時已經確定,轉動慣量 Is由電機本身的特性確定。
2.1.2控制目標
最終的控制目標是使實際螺旋槳輸出的推力 Fa跟隨給定的推力 Fr。在動態情況下,其他參數也應跟隨給定的推力 Fr。控制的目的是減少機械損耗,限制功率振蕩峰值。
2.1.3轉速控制
轉速控制部分主要由濾波環節、推力轉速轉換函數和轉速調節部分組成。Fd是給定的推力值,給定的推力經過濾波環節后,得到一個濾掉諧波和其它瞬時變化的推力,經過濾波后的推力為Fr,根據推力計算出需要的轉速 nr,需要的轉速再經過一個 PI 調節器,得到控制電機的轉矩 Tc。轉速控制策略最終輸出的是螺旋槳的轉速 n,與給定的轉速比較,從而達到控制轉速的目的[8]。
2.2惡劣海況下抗過旋控制策略
船舶在平靜海況下正常航行時,螺旋槳全部浸沒在水里。當海況惡劣變化時,螺旋槳會隨著外界環境的變化而露出水面,此時槳葉之間有一定的空氣流通,會產生通風變化。如果仍用平靜海況下的轉速控制策略,不能達到很好的控制效果,所以惡劣海況下,采用一種新型的控制策略,即抗過旋控制策略。圖2為抗過旋控制結構框圖。
控制目標:降低推進電機的轉矩,限制電機過速旋轉。
控制方法:計算抗過旋控制系數,調整惡劣海況下轉矩參考值 Tras,使螺旋槳最終輸出的推力值與給定值基本吻合。
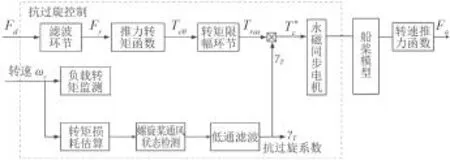
圖2 惡劣海況下抗過旋控制結構框圖Fig. 2 Block diagram of Anti-spin control in extreme condition
2.2.1抗過旋控制
抗過旋控制模塊由兩部分組成:一部分為轉矩抑制功能,一部分為轉矩平滑功能。總體控制思路:抗過旋控制器輸出一個系數送給推進器控制部分,將惡劣海況下的轉矩進行優化,乘以一個因子之后,再輸送給電機,從而對推進電機進行控制。轉矩抑制環節引入轉矩比例系數 γT控制推進器轉矩。轉矩平滑環節,用于形成與惡劣海況下的期望轉速相匹配的推進力,匹配推進力將實現電機轉矩的平滑過渡。依據調整后的軸轉速與轉矩的關系,得到轉矩參考值 Tras。Tras與 γT共同作為主推進控制模塊的輸入,實現惡劣海況下的船舶推進控制。圖3為抗過旋控制模塊結構圖。

圖3 抗過旋控制結構Fig. 3 Block diagram of Anti-spin control
2.2.2負載轉矩監測
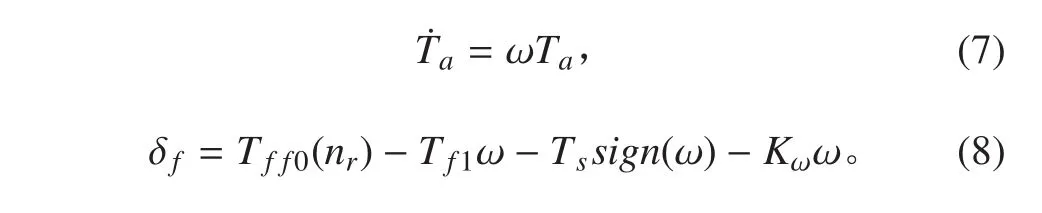
螺旋槳的旋轉動態模型為方程:

式中:nr為螺旋槳轉速參考值;Tf1為摩擦轉矩常數。Ta和δf滿足下面的方程:
有限的輸入 u 公式為:

其中 kg為電機與螺旋槳的傳動比。
與負載轉矩觀測器的數學模型類似,實際的螺旋槳旋轉動態模型關系式為:

2.2.3轉矩損耗估算

式中:n 為轉速;KTC為控制轉矩系數;為期望的額定螺旋槳負載轉矩。
期望的螺旋槳負載轉矩為:

當軸轉速比較低時,為了防止過速旋轉,對轉矩損失因子的估算值加上下限。由于軸轉速為0 時沒有推力損失,因此重新定義轉矩損失因子為:

2.2.4螺旋槳通風狀態檢測
推力損失的檢測有許多種方法,比較簡單的方法是對螺旋槳軸轉速的變化速度或者推進電機轉矩的變化速度設定一個檢測標準值。下面建立螺旋槳出入水檢測的算法[9],為了完善檢測算法,對轉矩損失因子加以限制對于檢測的另外一個要求是電機轉矩是非增的,即假定檢測信號為ζ,當檢測到螺旋槳處于通風狀態時將 ζ 置為1,否則將其置為0。數學關系式如下:
3 仿真模型的建立
圖4為系統仿真整體框圖。用 Matlab 搭建各部分仿真模型(圖5~圖8)。
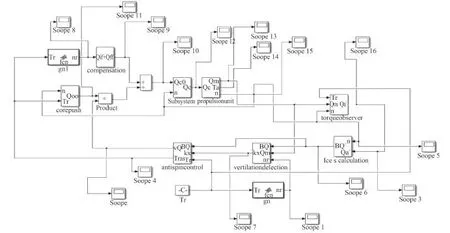
圖4 系統整體仿真框圖Fig. 4 Block diagram of simulation
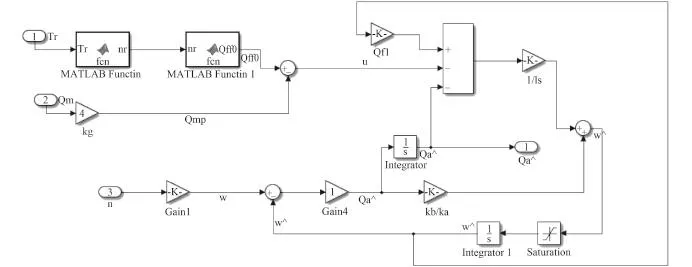
圖5 負載轉矩監測Fig. 5 Load torque detection
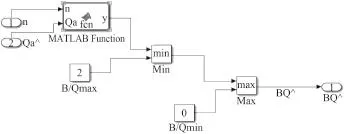
圖6 轉矩損耗估算Fig. 6 Torque loss calculation
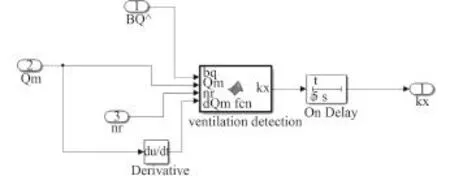
圖7 通風狀態檢測Fig. 7 Ventilation detection
仿真結果分析:抗過旋控制策略是在惡劣海況下產生控制效果。如圖9所示,2 s 之前船舶在平靜海況下航行,此時推力比較小;2 s 時產生通風,信號為1,船舶由平靜海況轉為惡劣海況航行,由于螺旋槳突然露出水面,產生通風,推力會突然增加,接近 3 500 kN。采用抗過旋控制策略后,螺旋槳產生的推力得以控制,2~5 s 之間減小到 300 kN,經過一段波動后,幾乎平穩在 300 kN,達到給定的推力值。可以證明抗過旋控制策略有一定的控制效果,能達到預期控制目標。

圖8 抗過旋控制Fig. 8 Anti-spin control
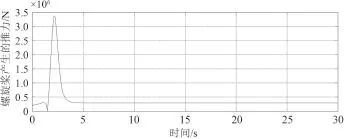
圖9 螺旋槳輸出的推力與時間關系曲線圖Fig. 9 Simulation result of thrust
4 結 語
抗過旋的組成部分包括抗過旋控制、螺旋槳負載轉矩監測、轉矩損耗估算、螺旋槳通風狀態檢測。抗過旋控制能在極端工況,即惡劣海況下控制螺旋槳,并能控制和降低軸轉速直至該現象結束。惡劣海況下,螺旋槳進出水面,使得螺旋槳轉速過快,采用抗過旋控制方法可以使轉速降低,減少轉矩損耗,避免機械損失。本文使用 Matlab 仿真軟件對船舶電力推進系統進行建模仿真,最終輸出的推力值與給定的推力值基本吻合,達到了降低推力的效果,驗證了抗過旋控制策略在惡劣海況下的可行性。
[1]何琪. 船舶電力推進負載模擬系統研究[J]. 艦船科學技術,2015, 37(2): 128-131. HE Qi. Research of load simulation system for marine electric propulsion[J]. Ship Science and Technology, 2015, 37(2):128-131.
[2]程木軍, 孫才勤. 智能PID控制器在船舶發電機電壓控制中的應用[J]. 大連海事大學學報, 2006, 32(2): 5-8, 16. CHENG Mu-jun, SUN Cai-qin. A new intelligent PID controller in application to marine generator voltage control system[J]. Journal of Dalian Maritime University, 2006, 32(2): 5-8, 16.
[3]李勇. 船舶電力推進模糊-PI控制方法[J]. 中國航海, 2014,37(1): 34-38. LI Yong. A fuzzy-PI control for vessel electric propulsion[J]. Navigation of China, 2014, 37(1): 34-38.
[4]何新英, 徐曼平. 基于神經元自適應PID船舶電力推進電機控制系統研究[J]. 廣東造船, 2013, 32(4): 47-48, 64. HE Xin-ying, XU Man-ping. Research on ship electric propulsion motor control system based on neuron adaptive PID control[J]. Guangdong Shipbuilding, 2013, 32(4): 47-48, 64.
[5]張桂臣. 復合誤差模型自適應船舶控制系統的應用研究[D].大連: 大連海事大學, 2009. ZHANG Gui-chen. The study and application of hybrid error adaptive model for ship control systems[D]. Dalian: Dalian Maritime University, 2009.
[6]郭燚, 鄭華耀. 船舶電力推進電機驅動技術研究[J]. 艦船科學技術, 2005, 27(4): 22-26. GUO Yi, ZHENG Hua-yao. Research on vessel electric propulsion motor drives technology[J]. Ship Science and Technology,2005, 27(4): 22-26.
[7]張利軍, 孟杰, 蘭海. 船舶電力系統的非線性魯棒性控制[M].北京: 國防工業出版社, 2011: 40-41. ZHANG Li-jun, MENG Jie, LAN Hai. Nonlinear robust control of ship power systems[M]. Beijing: National Defence Industry Press, 2011: 40-41.
[8]劉維亭, 李文秀. 艦船電力系統分散魯棒勵磁控制器的研究[J]. 船舶工程, 2005, 25(3): 46-50. LIU Wei-ting, LI Wen-xiu. Decentralized robust excitation controller for improvement of warship power system's stability[J]. Ship Engineering, 2005, 25(3): 46-50.
[9]SMOGELI ? N. Control of marine propellers-from normal to extreme conditions[D]. Trondheim, Norway: Norwegian University of Science and Technology, 2006.
Research on anti-spin control of marine electric propulsion system in extreme conditions
WANG Tong-xuan, REN Qian, LIANG Jing-kai, QU Yan-bin
(School of Information and Electrical Engineering, Harbin Institute of Technology at Weihai, Weihai 264209, China)
A propeller subject to extreme conditions may experience large load transients due to ventilation and in-andout-of water effects. The controllers designed for normal conditions may then no longer give satisfactory performance. Since torque and power control needs keeping constant, a loss of propeller load torque will lead to severe motor racing. To assure satisfactory performance for all conditions, the anti-spin control strategy for extreme conditions is therefore introduced. Differing from control strategy for normal conditions, the ventilation detection and loss effects are included the Anti-Spin control strategy. Moreover, loss factor and torque calculation are analyzed. The reliability of the anti-spin control strategy is verified.
marine electric propulsion system;extreme conditions;anti-spin control;loss calculation
U661.4
A
1672-7619(2016)09-0078-05
10.3404/j.issn.1672-7619.2016.09.015
2016-02-02;
2016-03-04
工信部高技術船舶科研資助項目(工信部聯裝[2013]411號);威海市大學共建資助項目(2013DXGJ04)
汪桐萱(1990-),女,碩士研究生,主要從事船舶電力推進系統的技術研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19