通氣超空泡形態及視景仿真研究
2016-11-04 12:35:47鄒啟明倪文璽
艦船科學技術 2016年9期
關鍵詞:系統
鄒啟明,鄭 為,倪文璽
(中國船舶重工集團公司第七〇五研究所,陜西 西安 710077)
通氣超空泡形態及視景仿真研究
鄒啟明,鄭為,倪文璽
(中國船舶重工集團公司第七〇五研究所,陜西 西安 710077)
超高速航行器在水下運動時,其大部分表面被超空泡包裹,構成了一種新的流體動力布局,運動模式和運動特性完全不同于常規水下航行器。為了分析超高速水下航行器運動的穩定性,本文對超空泡生成機理進行研究,給出描述超空泡形態的數學模型,得到不同影響因素作用下超空泡形態的變化規律。為驗證超空泡實時生成效果和超高速水下航行器運動過程各種動作功能,采用 Vega Prime 構建三維虛擬環境,在此基礎上設計超空泡視景演示系統,通過 ADI 仿真系統實時解算超空泡和水下航行器運動數據來驅動超空泡視景系統,逼真地演示超空泡動態生成過程以及水下航行器高速運行軌跡和“空泡 + 航行器”的相對運動關系等關鍵技術。
超空泡;生成機理;視景系統
0 引 言
當水下航行器與液體相對高速運動時,航行器表面附近的液體因低壓而發生相變,即物體表面水的壓強降低,且速度越高,壓強越低。當水壓降低到水的飽和蒸汽壓強(2 350 Pa)以下時,物體表面的水產生汽化現象,形成薄的包含水汽的包絡,這便是空泡。根據文獻[1-3]可知,隨著航行器速度越來越大或者人工通氣量的增大,空泡的發展過程是由局部空泡發展為超空泡、自然空泡發展為通氣空泡。另外,根據航行器速度和空泡流場中的壓差的變化,其邊界有脈動存在,從而形成非定常超空泡;當空泡流場中壓力不變時,且沿自由邊界速度恒定,形狀基本穩定形成定常超空泡[1]。
超高速航行器正是利用超空泡產生的原理和特性以及本身結構設計特點,在水下航行過程中生成大小、長度、閉合位置等滿足航行器運動穩定要求的超空泡,使航行器表面的大部分與水隔開,減小了航行器表面與水之間的粘性摩擦損失,從而大大減小航行阻力,獲得難以想象的水中高速。
在實際工程應用中,人工通氣超空泡的形成及穩定是一個涉及因素很多、研究難度很大、實現困難等復雜問題。本文主要開展人工通氣超空泡的數學仿真研究。根據所建立的數學模型,分析影響超空泡形態的因素,在給定的速度變化規律下,改變通氣參數和運動參數進行空泡形成過程的數學仿真模擬。并結合視景演示系統測試超空泡包絡動態形成和超高速航行器運動過程。
1 超空泡產生機理及數學模型
1.1超空泡產生機理
由描述流場壓力特性的伯努力方程可知,當物體在水下運動時,物體表面所受到的水壓力降低,速度越快壓力越小,然而當壓力降至水的飽和蒸汽壓 2 350 Pa(20 ℃ 時)以下時,由于水的表面擴張力的作用,物體表面的水產生汽化現象,這便形成空泡。根據文獻[5-6]可知,通過人工通氣,空泡長度就會增大,當與物體長度相當或將雷體包裹時,就形成了超空泡。其形成過程如圖1所示。
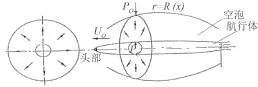
圖1 超空泡的產生機理Fig. 1 Sketch of generation mechanism for supercavitation
圖1中,當一個軸對稱細長水下航行器向前運動時,推開無運動(靜止)的流體,流體沿橫剖面擴展,隨著流體向外擴展,空泡在外部壓力 P0和內部壓力 Pc的形成壓差作用下擴展開來,隨著航行器向前運動,就不斷推開無運動的流體,不斷產生流體和空泡的徑向擴展,從而形成 r=R(x)空泡流場的連續邊界,于是空泡外形就這樣確定了,并具有一定的大小和形狀。
從圖1可看出,對于軸對稱細長航行體,生成的空泡形態基本上是橢圓形,在橫剖面上則認為空泡形狀是一個圓。
對于軸對稱細長航行器所生成的理想超空泡具有以下特性:
1)空泡外形具有確定性,只與雷體頭部(空化器)大小和空泡數有關;
2)空泡大部分長度上具有平滑清晰的邊界,內部透明,空泡壁是光滑的,厚度可認為等于 0;
3)自然超空泡雖然不穩定,但可向內部充氣形成更大穩定可控的超空泡;
4)受攻角和空化器舵角的影響,超空泡軸會發生偏移。
根據超空泡的上述特點,可以生成長度、大小及閉合位置均滿足要求的超空泡,從而達到水下航行器減阻的目的。
1.2數學模型
針對軸對稱的通氣超空泡進行數學描述。根據文獻[7]可給出細長航行體所形成的超空泡的有關數學模型。

其中:

方程的積分初始條件如下(t=τ):

式中:t 為時間;τ 為某截面 ξ 形成的時間;S(τ,t)為截面 ξ 在 t 時刻的橫截面積;Vn(τ)為生成截面ξ 時空化器的瞬時速度;p(∞)為環境壓力;Dn為空化器直徑;pc(t)為非定常通氣空泡內壓力 。

在假設的仿真條件下,結合超高速航行器的應用需求,根據空泡內氣體模型及超空泡形態模型進行數學仿真計算。通氣超空泡仿真變化曲線如圖2所示。

圖2 通氣超空泡變化曲線Fig. 2 Change curve of supercavitation
2 視景系統設計
為了演示超空泡包絡動態形成和超高速航行器運動過程,本文應用 Multigen Creator 等視景開發工具創建了效果逼真、紋理清晰的水下航行器、發射艦艇及攻擊目標等三維模型,以發射艦艇裝載發射超高速航行器的仿真過程,采用 VegaPrime 構建三維戰場環境,在此基礎上設計實現了超空泡數學仿真應用的視景系統。該視景系統通過實時光纖網絡和以太網絡兩種鏈路方式接收來自數學或半實物仿真系統的網絡數據,驅動三維實體在立體視場中展現水下航行器和目標追蹤對抗全過程,重點實現系統中超空泡數學建模,通過實時仿真數據在線驅動視景動態生成包絡、航行器高速運行軌跡和“空泡+航行器”的相對運動關系等關鍵技術。視景演示系統研制的技術要求如下:
1)模型要求(發射艇模型、水下航行器實體模型、海洋環境模型等);
2)視頻效果要求(海底、海面、雷體動作變化、水下航行器航跡等);
3)接口要求(硬件接口、數據接口、通訊協議等);
4)顯示要求(三維動畫視窗、二維動畫視窗、運動參數視窗等);
5)運行環境要求(軟件平臺、硬件平臺等)。
根據這些要求,選取 AdvantageGP 軟件環境作為開發平臺,在 AdvantageGP 軟件環境下運用 Matlab/ Simulink 開發超空泡動態數學模型和超高速水下航行器全彈道數學模型,以及在 AdvantageGP 軟件環境下以太網的驅動程序,然后通過規定的接口協議,用數學仿真平臺實時解算的數據通過數據接口去驅動視景演示平臺,實現超高速航行器全彈道運動過程中的彈道軌跡和超空泡動態生成過程,其視景仿真演示系統平臺構成如圖3所示。
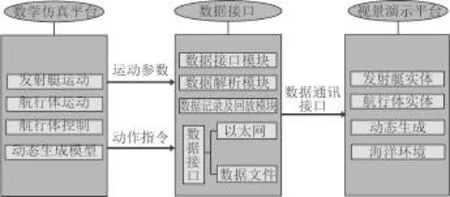
圖3 視景仿真演示系統Fig. 3 Demonstration system of visual simulation
3 視景測試效果及驗證
為了驗證超空泡實時生成效果和超高速航行器姿態控制原理和控制方法的可行性和可操作性,以及檢驗水下航行器運動過程中的動作時序和完成功能的正確性,利用圖3的仿真系統視景演示平臺,對超空泡生成過程進行測試,相應的視景測試效果如圖4~圖6所示。
圖4~圖6測試結果表明:

圖4 自然空泡生成效果圖Fig. 4 Effect diagram of natural cavity

圖5 充氣空泡生成效果圖Fig. 5 Effect diagram of ventilated cavity

圖6 空泡穩定閉合狀態效果圖Fig. 6 Effect diagram of closure of stability supercavitation
1)超空泡仿真視景演示系統設計正確,功能完備,能正確反映超空泡包絡動態運動和超高速航行器運動過程各種動作功能;
2)超高速航行器姿態控制數學仿真演示系統能夠模擬 200 kn 超高速水下航行器全彈道運動過程,且所計算的主要運動參數符合要求;
3)在 AdvantageGP 軟件環境下,能夠正確解算Matlab/Simulink 的超高速航行器全彈道數學模型和超空泡動態數學模型,通過規定的接口協議能夠實時驅動超高速航行器的彈道軌跡和超空泡動態生成過程。
4 結 語
本文從超空泡生成機理出發,主要描述了超空泡形態的數學模型,進行仿真計算,得到了不同影響因素作用下,超空泡形態的變化規律,進一步認識了超空泡的動態特性。在研究超空泡技術的應用方面,通過視景系統演示平臺接收的實時解算數據,驅動三維實體模型和空泡模型動態運動,能夠逼真的演示三維戰場環境。該仿真演示系統可以作為研究超空泡運動過程中各種功能、性能、指標、運動參數、充氣參數、動作時序等的軟件平臺,并可為進一步開展超高速航行器控制系統相關工作研究提供參考。
[1]SAVCHENKO Y N. Supercavitation-problems and perspectives[C]//Proceedings of the Fourth International Symposium on Cavitation. Pasadena: California Institute of Technology, 2001.
[2]LOGVINOVICH G V. Hydrodynamics of flows with free boundaries[M]. Kyiv: Naukova Dumka, 1969.
[3]EUTENEUER E A. Further studies into the dynamics of a supercavitating torpedo[D]. Minneapolis: University of Minnesota,2003.
[4]VANEK B, BOKOR J, BALAS G. Theoretical aspects of highspeed supercavitation vehicle control[C]//Proceedings of the 2006 American Control Conference. Minneapolis, Minnesota,USA: IEEE, 2006.
[5]GOEL A. Control strategies for supercavitating vehicles[D]. Florida: University of Florida, 2002.
[6]GOEL A. Robust control of supercavitating vehicles in the presence of dynamic and uncertain cavity[D]. Florida: University of Florida, 2005.
[7]VLASENKO Y D. Experimental investigation of supercavitation flow regimes at subsonic and transonic speeds[C]//Proceedings of the Fifth International Symposium on Cavitation(CAV2003). Osaka, Japan, 2003.
[8]褚彥軍, 康鳳舉, 聶衛東, 等. 水下航行器對抗視景仿真系統研究[J]. 艦船電子工程, 2004, 24(5): 18-21. CHU Yan-jun, KANG Feng-ju, NIE Wei-dong, et al. Research and development of visual scene simulation system in underwater vehicle distributed interactive simulation system[J]. Ship Electronic Engineering, 2004, 24(5): 18-21.
Research on the shape and scene simulation of ventilated supercavitation
ZOU Qi-ming, ZHENG Wei, NI Wen-xi
(The 705 Research Institute of CSIC, Xi'an 710077, China)
Supercavitation can be viewed as a phenomenon that would help us to break the speed barrier in underwater vehicles. The idea is to make the vehicle surrounded by water vapor while it is traveling underwater. The new hydrodynamic position and motion mode of a high speed supercavitation vehicle is not same as an usual bedewed vehicle. The motion characteristics have also unique behavior. In order to analysis the motion stability, it is necessary to study the forming principle of supercavitation and mathematics model of supercavitation shape was given in this paper. The affecting parameters of supercavitation shape were analyzed and calculated by simulation method.In order to validate the generation function of the supercavitation and movement process of the high speed supercavitation vehicle. It is created by using MultiGen Creator and Vega Prime software platform, a 3D environment model is created by using Skyline software platform. The simulation results show that this virtual simulation about the course of the supercavitation forming and the movement connections between the supercavitation and the vehicle.
supercavitation;forming principle;view system
U661
A
1672-7619(2016)09-0101-03
10.3404/j.issn.1672-7619.2016.09.020
2016-02-25;
2016-04-18
國家重點實驗室基金資助項目(9140C230403150C23103)
鄒啟明(1979-),男,高級工程師,主要從事水下航行器數學建模與仿真技術研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32