水下無人搜探系統(tǒng)任務(wù)載荷使用模式分析
2016-11-04 12:35:48陳強(qiáng)
艦船科學(xué)技術(shù) 2016年9期
陳 強(qiáng)
(中國(guó)人民解放軍92537部隊(duì),北京 100161)
水下無人搜探系統(tǒng)任務(wù)載荷使用模式分析
陳強(qiáng)
(中國(guó)人民解放軍92537部隊(duì),北京 100161)
研究水下靜止目標(biāo)探測(cè)任務(wù)載荷的功能和性能,分析給出基于任務(wù)載荷的航行器態(tài)勢(shì)感知自主水平。按照任務(wù)載荷是否同時(shí)使用、任務(wù)載荷探測(cè)距離、目標(biāo)類型和屬性、使用人員對(duì)航行器(含任務(wù)載荷)干預(yù)程度,以及人員干預(yù)程度和任務(wù)組合等幾個(gè)方面,提出水下無人搜探系統(tǒng)任務(wù)載荷使用模式。
任務(wù)載荷;搜探系統(tǒng);使用模式
0 引 言
水下無人搜探系統(tǒng)是以搜探型水下無人航行器(以下簡(jiǎn)稱航行器)為主體的水下無人系統(tǒng)。整個(gè)系統(tǒng)功能由母船或岸上部分的指揮與控制功能、操作與保障功能,1個(gè)或若干個(gè)航行器功能構(gòu)成。其擔(dān)負(fù)的使命任務(wù)主要是搜索和探測(cè)水下各類靜止目標(biāo)。任務(wù)載荷是航行器重要組成部分,是航行器完成任務(wù)的基礎(chǔ)和條件。其使用模式與水下無人搜探系統(tǒng)任務(wù)類型和性質(zhì)、任務(wù)海域海洋環(huán)境、航行器行動(dòng)方式、任務(wù)載荷性能和搜探對(duì)象(或目標(biāo))特征關(guān)系密切。針對(duì)上述影響因素,本文分析和提出水下無人搜探系統(tǒng)任務(wù)載荷的使用模式。
1 水下無人搜探系統(tǒng)任務(wù)載荷使用模式
1.1任務(wù)載荷類型
按照探測(cè)設(shè)備的工作原理,分為聲學(xué)探測(cè)載荷和非聲探測(cè)載荷。聲學(xué)探測(cè)載荷包括聲信標(biāo)探測(cè)儀、側(cè)掃聲吶、合成孔徑聲吶、多波束測(cè)深聲吶、前視成像聲吶等;非聲探測(cè)載荷包括水下電視、磁力儀和CTD測(cè)量?jī)x等。按照探測(cè)對(duì)象不同,分為目標(biāo)探測(cè)載荷和海洋環(huán)境要素與參數(shù)探測(cè)載荷,CTD 測(cè)量?jī)x屬于海洋環(huán)境探測(cè)載荷,其他屬于目標(biāo)探測(cè)載荷,有的兼顧海洋環(huán)境探測(cè),如多波束測(cè)深聲吶等。
1.2任務(wù)載荷性能與功能[1]
1)聲信標(biāo)探測(cè)儀
使用水聽器接收聲信標(biāo)發(fā)出的聲信號(hào),屬于被動(dòng)接收聲信號(hào)工作方式。具備對(duì)聲信標(biāo)信號(hào)的檢測(cè)、識(shí)別、定位和數(shù)據(jù)存儲(chǔ)功能。工作頻率 37.5 kHz,作用距離 1 800~3 600 m。其功能類似于人耳,能聽到航行器周圍的超聲波信號(hào)。該設(shè)備使用航速?zèng)]有嚴(yán)格限制,在整個(gè)任務(wù)海域可能持續(xù)使用。用于對(duì)失事艦艇、飛機(jī)的黑匣子或其他聲信標(biāo)的探測(cè)、識(shí)別、定位或再定位。該類設(shè)備具備對(duì)目標(biāo)聲信號(hào)的自動(dòng)識(shí)別和定位能力。
2)側(cè)掃聲吶
側(cè)掃聲吶等目標(biāo)成像聲吶的功能類似于人的 眼睛,用來觀察航行器周圍幾百米左右的水下目標(biāo)。側(cè)掃成像聲吶安裝在航行器兩舷側(cè)中線下方。工作時(shí),發(fā)射換能器向航行器兩側(cè)下方發(fā)射扇形波束的聲脈沖,遇海底(或水下目標(biāo))產(chǎn)生反射波,接收換能器按回波到達(dá)的時(shí)間先后依次接收。經(jīng)信號(hào)處理后形成二維目標(biāo)聲圖像。側(cè)掃成像聲吶工作頻率在 200~600 kHz 之間,探測(cè)距離一般在 100~500 m 之間,距離分辨率為5~8 厘米級(jí)。美國(guó)的 2200-S 型側(cè)掃成像聲吶,可用在小型航行器上。既可全自動(dòng)工作,也可由航行器或水聲鏈控制。通過任務(wù)載荷控制界面,功率放大器的功率輸出可以人工選擇,聲波發(fā)射速率可以人工調(diào)節(jié)。在水面,1 臺(tái)帶有 DISCOVER 軟件的便攜式 PC 機(jī),顯示和儲(chǔ)存由航行器卸載的聲吶數(shù)據(jù)。該類設(shè)備用于掃側(cè)可能出現(xiàn)在航行器兩側(cè)下方的失事艦艇、飛機(jī)等較大目標(biāo)。可在整個(gè)任務(wù)海域持續(xù)使用,也可間斷使用。為確保成像質(zhì)量,使用時(shí)距離海底高度幾十米,使用航速有一定限制。由于目標(biāo)圖像數(shù)據(jù)量很大,航行器機(jī)內(nèi)設(shè)備數(shù)據(jù)實(shí)時(shí)處理后的信息,不足以形成可供航行器自動(dòng)識(shí)別和確認(rèn)目標(biāo)的情報(bào)級(jí)信息,需要通過上行水聲通信鏈將目標(biāo)圖像上傳到母船,由任務(wù)數(shù)據(jù)分析員進(jìn)行分析與處理后,再人工識(shí)別和確認(rèn)。
3)合成孔徑聲吶
合成孔徑聲吶也安裝在航行器兩舷側(cè)中線下方。它是一種新型高分辨水下成像聲吶。其原理是利用小孔徑基陣的移動(dòng)來獲得移動(dòng)方向上大的合成孔徑,從而得到方位方向的高分辨力。其分辨率比常規(guī)側(cè)掃聲吶高 1~2個(gè)量級(jí),可用于探測(cè)掩埋目標(biāo)。獲得這種高分辨率的代價(jià)是復(fù)雜的成像算法和對(duì)航行器運(yùn)動(dòng)的嚴(yán)格要求。挪威 HUGIN1000 航行器上采用了 4400 型合成孔徑側(cè)掃聲吶系統(tǒng)。該系統(tǒng)由水下聲發(fā)射和接收陣、母船載數(shù)據(jù)處理和顯示控制計(jì)算機(jī) 2個(gè)主要部分組成。聲吶工作頻率 120 kHz,探測(cè)最大距離范圍 500 m左右,水平距離分辨率 10 cm,實(shí)時(shí)處理時(shí)延 20~60 s,航行器航速 4~7 km。系統(tǒng)可實(shí)時(shí)處理合成孔徑聲吶數(shù)據(jù),其結(jié)果可用于數(shù)據(jù)后處理系統(tǒng)。合成孔徑聲吶的指令和控制來自水面顯示處理器,未處理的原始圖像數(shù)據(jù)上傳給母船上的合成孔徑處理器進(jìn)行處理。處理后的聲吶圖像發(fā)送到水面顯示處理器上,作為最終的聲吶結(jié)果用于數(shù)據(jù)顯示。該類設(shè)備可用于精細(xì)掃側(cè)航行器兩側(cè)下方可能出現(xiàn)的黑匣子等較小海底裸露或掩埋目標(biāo)。可在整個(gè)任務(wù)海域持續(xù)使用,也可間斷使用。為確保成像質(zhì)量,使用時(shí)距離海底高度幾十米,使用航速有嚴(yán)格限制。同樣,由于目標(biāo)圖像數(shù)據(jù)量很大,航行器機(jī)內(nèi)設(shè)備數(shù)據(jù)實(shí)時(shí)處理后的信息,不足以形成可供航行器自動(dòng)識(shí)別和確認(rèn)目標(biāo)的情報(bào)級(jí)信息,需要通過上行水聲通信鏈將目標(biāo)圖像上傳到母船,由任務(wù)數(shù)據(jù)分析員進(jìn)行分析與處理后,再人工識(shí)別和確認(rèn)。
4)多波束測(cè)深聲吶
多波束測(cè)深聲吶可同時(shí)獲得與航行器航跡相垂直面內(nèi)的數(shù)十個(gè)深度值,屬于回聲測(cè)深聲吶范疇,通常安裝在航行器底部。發(fā)射換能器發(fā)射一束扇形立體波束,接收換能器接收海底或目標(biāo)的回波信號(hào)。通過計(jì)算機(jī)實(shí)時(shí)處理后,可獲得全覆蓋海底地形圖及航行障礙物的位置和深度等資料。其工作頻率一般為200~400 kHz,作用距離一般為200~500 m,工作深度 1 500 m。該類設(shè)備可用于探測(cè)航行器正下方的水下目標(biāo)。可兼顧用于海洋調(diào)查的大面積海底高度測(cè)量。可在整個(gè)任務(wù)海域持續(xù)使用,也可間斷使用。為確保成像質(zhì)量,使用時(shí)距離海底高度幾十米,使用航速有嚴(yán)格限制。同樣,該類聲吶不具備對(duì)目標(biāo)自動(dòng)識(shí)別能力。需要通過上行水聲通信鏈將目標(biāo)圖像上傳到母船,由任務(wù)數(shù)據(jù)分析員進(jìn)行分析與處理后,再人工識(shí)別。
5)前視成像聲吶
前視成像聲吶使用自身發(fā)射和目標(biāo)反射的聲波,對(duì)航行器前進(jìn)方向的水中目標(biāo)進(jìn)行探測(cè)、識(shí)別和定位。前視成像聲吶工作頻率一般在 75~500 kHz 之間,探測(cè)距離一般在 200~500 m 之間,距離分辨率為厘米級(jí),垂直波束寬度 15°~27°,水平波束寬度128°~165°,聲吶陣工作深度一般在 500 m 左右。當(dāng)航行器距水面和海底較近時(shí),受海面和海底反射影響,有時(shí)成像質(zhì)量難以保證。該類設(shè)備能用于對(duì)航行器正前方的水中目標(biāo)進(jìn)行近距離探測(cè)和聲學(xué)目標(biāo)成像,其圖像分辨率很高,可用于目標(biāo)識(shí)別與確認(rèn)。可在整個(gè)任務(wù)海域持續(xù)使用,也可間斷使用。為確保成像質(zhì)量,對(duì)航行器航速有一定限制。同樣,該類設(shè)備不具備對(duì)目標(biāo)的自動(dòng)識(shí)別和確認(rèn)能力,需要通過上行水聲通信鏈將目標(biāo)圖像上傳到母船,由任務(wù)數(shù)據(jù)分析員分析與處理后,再人工識(shí)別與確認(rèn)。
6)水下光學(xué)成像設(shè)備
水下光學(xué)成像設(shè)備的功能類似于人的眼睛,能觀察到航行器周圍幾十米以內(nèi)的水下目標(biāo)。挪威 Kongsberg Maritime 公司研發(fā)的 OE 系列水下照相機(jī),是高清晰度增強(qiáng)型 CCD 照相機(jī)。分辨率為400~570 電視線,靈敏度為1.0 × 10-5~2.0 × 10-2lux,工作深度為3 000~4 500 m。該類設(shè)備用于近距離拍攝水下疑似目標(biāo),獲取目標(biāo)光學(xué)圖像信息,用以人工判定是否為待尋目標(biāo),如沉底水雷或錨雷。通常在整個(gè)任務(wù)海域短時(shí)使用。該類設(shè)備成像質(zhì)量受海水渾濁度和航速影響很大。為確保成像質(zhì)量,使用航速有嚴(yán)格限制。同樣,由于目標(biāo)圖像數(shù)據(jù)量很大,航行器機(jī)內(nèi)設(shè)備數(shù)據(jù)實(shí)時(shí)處理后的信息,不足以形成可供自動(dòng)識(shí)別和確認(rèn)目標(biāo)的情報(bào)級(jí)信息,需要通過上行水聲通信鏈將目標(biāo)圖像上傳到母船,由任務(wù)數(shù)據(jù)分析員進(jìn)行分析與處理后,再人工識(shí)別和確認(rèn)。
7)磁力儀
磁力儀利用水下目標(biāo)具有磁性特性,會(huì)影響地球表面磁力線的原理作為探測(cè)的基本理論。磁力儀采用被動(dòng)方式工作,具有隱蔽性好,可靠性高,受水文、底質(zhì)等海洋環(huán)境因素影響小等優(yōu)點(diǎn)。磁力儀的功能可類似于人的嗅覺器官。根據(jù)探測(cè)目標(biāo)磁場(chǎng)強(qiáng)度的不同,磁力儀作用距離在幾米至幾百米。G-880 海洋銫光泵磁力/梯度儀,具有測(cè)量磁場(chǎng)、海底深度等功能,磁力測(cè)量范圍為17 000~100 000 nT,采樣周期 0.1 s 的靈敏度為0.05 nT,可在航行器上使用。每套 G-880 設(shè)備提供一套數(shù)據(jù)紀(jì)錄和系統(tǒng)控制的基本軟件包,軟件記錄了磁力數(shù)據(jù)及 GPS 數(shù)據(jù),這些數(shù)據(jù)可在船上或岸上的計(jì)算機(jī)上顯示。磁力儀可在整個(gè)任務(wù)海域持續(xù)使用,對(duì)航行器航速?zèng)]有嚴(yán)格限制。該類設(shè)備可用于目標(biāo)精確定位和類型辨識(shí)。特定時(shí)空點(diǎn)的磁特征數(shù)據(jù),可通過水聲通信鏈上傳給母船,便于使用人員對(duì)疑似目標(biāo)的識(shí)別和確認(rèn)。
8)CTD 測(cè)量?jī)x
CTD 測(cè)量?jī)x的功能可類似于人的觸覺器官-皮膚,能感受到周圍海水的溫度、鹽度和水壓。FastCAT SBE 49 型 CTD 測(cè)量?jī)x,傳導(dǎo)率測(cè)量范圍 0~9 S/m,溫度測(cè)量范圍-5 ℃~+ 35 ℃,壓力測(cè)量范圍 0~7 000 m,采樣頻率 16 Hz,可以提供非常高的海洋構(gòu)造和梯度空間分辨率,最大工作深度 7 000 m。采樣模式包括自動(dòng)采樣和選擇采樣。CTD 測(cè)量?jī)x使用時(shí)對(duì)航行器航速?zèng)]有嚴(yán)格限制,可在整個(gè)任務(wù)海域持續(xù)使用。該種儀器作為海洋環(huán)境要素和參數(shù)探測(cè)載荷時(shí),其測(cè)量的原始數(shù)據(jù)不需實(shí)時(shí)處理,可以記錄在航行器機(jī)內(nèi)設(shè)備中,特定時(shí)空點(diǎn)的測(cè)量數(shù)據(jù),可通過水聲通信鏈上傳給母船。
1.3基于任務(wù)載荷的航行器態(tài)勢(shì)感知自主水平[2]
根據(jù)航行器態(tài)勢(shì)感知能力的不同,美國(guó) F2541 標(biāo)準(zhǔn)給出了航行器態(tài)勢(shì)感知自主水平度量的定義:1)原始。傳感器收集的信息未經(jīng)處理;2)半處理。傳感器信息經(jīng)過初步的半處理;3)特征。經(jīng)過過濾、標(biāo)準(zhǔn)化并描繪特征;4)聚類。聚類整個(gè)時(shí)間、空間和/或特征以及多種形態(tài)(多種傳感器)的信息;5)解讀。與某些知識(shí)數(shù)據(jù)庫進(jìn)行比較(將特征集與特定真實(shí)物體關(guān)聯(lián))或與某些特征數(shù)據(jù)庫進(jìn)行比較(數(shù)據(jù)形態(tài)表明真實(shí)物體),以便根據(jù)物理測(cè)量值來推測(cè)物體特征;6)推理。與態(tài)勢(shì)或行為特征知識(shí)庫相關(guān)聯(lián);7)意圖。與已知運(yùn)行模式知識(shí)庫相關(guān)聯(lián),包括識(shí)別計(jì)劃和目的、識(shí)別并/或推測(cè)意圖。根據(jù)上述定義,枚舉若干個(gè)任務(wù)載荷傳感器,以及傳感器與航行器和人員的組合方式,給出基于任務(wù)載荷傳感器的航行器態(tài)勢(shì)感知自主水平。
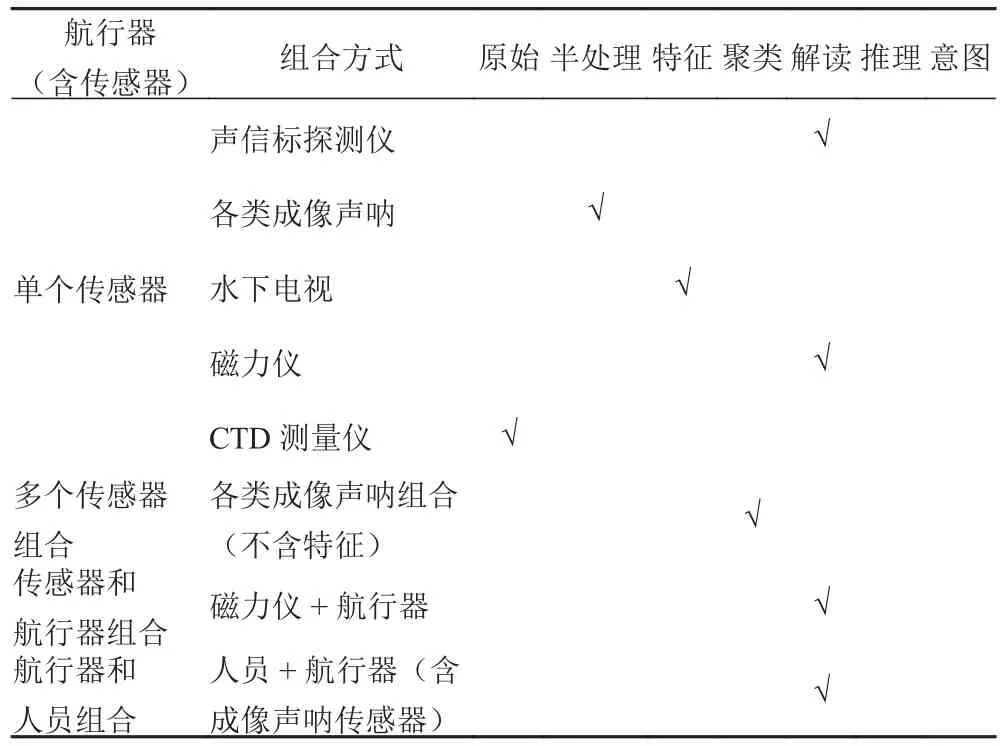
表1 基于任務(wù)載荷傳感器的航行器態(tài)勢(shì)感知自主水平Tab. 1 Situational awareness levels of autonomy for UUV considering payload
1.4各類任務(wù)載荷使用模式
1)按照任務(wù)載荷是否同時(shí)或分時(shí)使用模式
① 同時(shí)使用模式。
即航行器進(jìn)入搜探海區(qū)后,同時(shí)打開和使用若干個(gè)任務(wù)載荷。優(yōu)點(diǎn)是獲取目標(biāo)和環(huán)境數(shù)據(jù)多,不容易遺漏目標(biāo)。不足是造成蓄電池能源部分浪費(fèi)。通常,側(cè)掃成像聲吶、合成孔徑聲吶、前視成像聲吶、多波束測(cè)深聲吶適宜同時(shí)打開使用。
② 分時(shí)使用模式。
即航行器進(jìn)入搜探海區(qū)開始搜探后,根據(jù)任務(wù)載荷性質(zhì)和性能,按照一定時(shí)間順序打開預(yù)設(shè)任務(wù)載荷。優(yōu)點(diǎn)是節(jié)約蓄電池能源,搜探行動(dòng)針對(duì)性較強(qiáng)。如對(duì)于搜探黑匣子等發(fā)聲目標(biāo),先打開聲信標(biāo)探測(cè)儀,當(dāng)其發(fā)現(xiàn)目標(biāo)后,引導(dǎo)航行器向疑似目標(biāo)方向航行,并激活側(cè)掃成像聲吶、合成孔徑聲吶、前視成像聲吶和多波束測(cè)深聲吶等聲學(xué)成像設(shè)備進(jìn)入工作狀態(tài)。由于聲信標(biāo)探測(cè)儀探測(cè)距離遠(yuǎn),且能夠自動(dòng)識(shí)別目標(biāo)并確定方位,可以減少成像聲吶在不確定位置和方向上的搜索。
2)按照任務(wù)載荷探測(cè)距離可分為遠(yuǎn)距離“粗略”探測(cè)、中距離“粗略”探測(cè)和近距離定點(diǎn)“精準(zhǔn)”探測(cè)。
① 遠(yuǎn)距離 “粗略”探測(cè)。指作用距離在千米級(jí)的聲信標(biāo)探測(cè)儀,結(jié)合航行器機(jī)動(dòng)對(duì)水下目標(biāo)的探測(cè),用以獲取目標(biāo)概略位置和方向。
② 中距離“粗略”探測(cè)。指作用距離在百米級(jí)的側(cè)掃聲吶、合成孔徑聲吶多波束測(cè)深聲吶、前視聲吶等成像聲吶和磁力儀,結(jié)合航行器機(jī)動(dòng)對(duì)水下目標(biāo)的探測(cè),用以自動(dòng)發(fā)現(xiàn)水下疑似目標(biāo),獲取目標(biāo)位置、概略聲圖像和概略磁特征,并對(duì)已觀察目標(biāo)進(jìn)行初步判斷,為目標(biāo)圖像人工識(shí)別和確認(rèn)提供支持。
③ 近距離定點(diǎn)“精準(zhǔn)”探測(cè)。指作用距離在 10 米級(jí)的水下電視,結(jié)合航行器定點(diǎn)或小半徑回轉(zhuǎn)工況,對(duì)水下目標(biāo)進(jìn)行的探測(cè),用以自動(dòng)或人工識(shí)別與確認(rèn)目標(biāo)。該探測(cè)模式的特點(diǎn)是:距離目標(biāo)近,定點(diǎn)或回轉(zhuǎn)工況,可采用多方位、多角度、變化高度進(jìn)行觀察。
3)按照搜探目標(biāo)類型和屬性分類
① 對(duì)掩埋目標(biāo)使用合成孔徑聲吶探測(cè),其他任務(wù)載荷可不開機(jī)。
② 對(duì)不發(fā)聲目標(biāo),聲信標(biāo)探測(cè)儀不需要開機(jī)。
③ 對(duì)非磁性目標(biāo),磁力儀不必開機(jī)。由此,節(jié)省能源,避免浪費(fèi)。在水下無人搜探系統(tǒng)任務(wù)載荷實(shí)際使用和應(yīng)用軟件設(shè)計(jì)中,要綜合考慮搜探任務(wù)性質(zhì)、已掌握待搜尋目標(biāo)情報(bào)、海區(qū)海洋環(huán)境情況、航行器行動(dòng)方式、任務(wù)載荷性質(zhì)和性能、搜探目標(biāo)的屬性和特征,統(tǒng)籌各類任務(wù)載荷使用時(shí)機(jī)和策略。在掌握目標(biāo)位置和屬性情況下,可以采用針對(duì)性強(qiáng)的使用策略。
4)按照使用人員對(duì)航行器(含任務(wù)載荷)干預(yù)程度分類
按照使用人員對(duì)航行器(含任務(wù)載荷)干預(yù)程度,可大致分為:
① 不干預(yù)。是指航行器從布放后到回收前,航行器和任務(wù)載荷始終自動(dòng)運(yùn)行,使用人員在必要情況下向航行器發(fā)出指令。
② 弱干預(yù)。是指任務(wù)載荷通過航行器按一定規(guī)則(如按時(shí)間間隔、發(fā)現(xiàn)疑似目標(biāo)等)向使用人員報(bào)告情況,使用人員根據(jù)報(bào)告情況提出處理意見,航行器按照使用人員的反饋意見,自主制訂航行器和任務(wù)載荷規(guī)劃,并執(zhí)行和評(píng)估。
③ 中干預(yù)。使用人員在航行器行動(dòng)前,審查航行器所有行動(dòng)和任務(wù)載荷工作參數(shù)和狀態(tài),但不直接操作航行器。
④強(qiáng)干預(yù)。是指使用人員使用視頻和/或其他傳感器,通過“持續(xù)”的通信方式(如光纜通信)直接控制任務(wù)載荷,如連續(xù)直接遙控操作航行器的目標(biāo)成像聲吶、水下電視等傳感器,航行器和任務(wù)載荷沒有主動(dòng)動(dòng)作。該模式如同有纜無人潛器(ROV)使用模式,除了不需要母船供電。
5)人員干預(yù)程度和任務(wù)組合的使用模式
與航行器使用模式類似,任務(wù)載荷采用何種使用模式,與航行器任務(wù)類型、任務(wù)性質(zhì)、任務(wù)載荷傳感器工作原理和基于任務(wù)載荷傳感器的航行器態(tài)勢(shì)感知自主水平有很大關(guān)系。以面向防險(xiǎn)救生的水下目標(biāo)搜探任務(wù)為例,分析給出各類任務(wù)載荷傳感器人員干預(yù)程度。

表2 面向防險(xiǎn)救生水下目標(biāo)搜探任務(wù)的任務(wù)載荷人員干預(yù)程度Tab. 2 Client intervention degree to payload on task of search and detection underwater target about distress prevention and rescue
其中,聲信標(biāo)探測(cè)儀可實(shí)時(shí)給出目標(biāo)方位;磁力儀可實(shí)時(shí)或近實(shí)時(shí)給出目標(biāo)距離和目標(biāo)磁特征信息;CTD 測(cè)量?jī)x可實(shí)時(shí)或近實(shí)時(shí)給出海洋環(huán)境數(shù)據(jù)。各類成像聲吶和水下電視可以將觀察到的目標(biāo)視頻圖像截取成靜止圖片,按照一定時(shí)間間隔或事件觸發(fā)方式(如發(fā)現(xiàn)疑似目標(biāo)),將目標(biāo)圖像上傳給母船,經(jīng)過任務(wù)數(shù)據(jù)分析員的分析和處理后,由指揮員決策航行器后續(xù)行動(dòng)。
2 結(jié) 語
正確分析和提出水下無人搜探系統(tǒng)任務(wù)載荷使用模式,對(duì)于確定水下無人搜探系統(tǒng)任務(wù)剖面、搞好裝備應(yīng)用軟件研制和部隊(duì)訓(xùn)練使用具有重要意義。本文結(jié)合國(guó)內(nèi)外水下無人航行器相關(guān)任務(wù)載荷的功能和性能,初步提出了任務(wù)載荷的使用模式,所選任務(wù)載荷組合使用方式不夠全面和完整,對(duì)任務(wù)載荷使用時(shí)序關(guān)系的描述還不到位,有待于今后進(jìn)一步研究和豐富該方面的工作。
[1]陳強(qiáng). 水下無人航行器[M]. 北京: 國(guó)防工業(yè)出版社, 2014.
[2]Standard guide for unmanned undersea vehicles (UUV)autonomy and control: ASTM F2541-2006[S]. 2007.
Analysis of payload application mode for search and detection system of UUV
CHEN Qiang
(No. 92537 Unit of PLA, Beijing 100161, China)
This paper described function and performance for payload of detection underwater resting target, It presented situational awareness levels of autonomy for UUV considering payload. This paper proposed payload application mode for search and detection system of UUV, According to payload application whether is simultaneity or not, payload detection distance, kind and attribute of target, client intervention degree to UUV (include payload) and client intervention degree is combined with the task etc.
payload;search and detection system;application mode
U674.94
A
1672-7619(2016)09-0104-04
10.3404/j.issn.1672-7619.2016.09.021
2016-04-27
陳強(qiáng)(1961-),男,研究員,主要從事UUV發(fā)展規(guī)劃論證、型號(hào)立項(xiàng)論證、關(guān)鍵技術(shù)研究。