一種電路機理等效的船舶 Nomoto 模型
2016-11-04 12:35:49張顯庫楊光平
艦船科學技術 2016年9期
張顯庫,楊光平
(大連海事大學 航海學院,遼寧 大連 116026)
一種電路機理等效的船舶 Nomoto 模型
張顯庫,楊光平
(大連海事大學 航海學院,遼寧 大連 116026)
為使船舶 Nomoto 模型方程形象化,用電阻、電容和放大器搭建電路,經推導其傳遞函數與船舶Nomoto 模型相同,通過適當選取電路元件參數,實現“育鯤輪”的電路機理等效模型。將融入旋回降速補償后的電路仿真實驗結果與實船回轉試驗結果進行比對,證明電路機理模型可以較高精度等效船舶 Nomoto 模型,對船舶運動半物理仿真具有重要指導意義。
船舶模型;電路;等效
0 引 言
建立數學模型是分析系統性能、控制器設計及系統仿真的關鍵。船舶運動數學模型一般可由理論推導、系統辨識、實船試驗等方法獲得[1-6]。船舶運動數學模型是否有較高的精度一切以是否與實船試驗結果符合較好為標準,實船試驗費用太昂貴,數字仿真試驗不直觀。本文希望以 Matlab 電路系統工具箱中的電路元件搭建一個系統,來實現軟件半物理仿真,其數學方程與推導的船舶運動數學方程相同。文獻[1]介紹了一種電路網絡的快速建模方法,本文將其反過來使用,即將數學模型變成電路網絡,使之等效于船舶Nomoto 模型。Nomoto 模型雖然是一種最簡單的船舶運動數學模型,但因其參數只有 2個且物理意義明顯,故在船舶操縱性能預報和線性控制器設計等方面仍然具有較好的應用價值。相對地,以日本學派為代表的船舶運動分離型數學模型和以歐美學派為代表的整體型船舶運動數學模型因參數眾多,且大部分參數求取使用回歸公式或經驗公式,對于新型船舶或大型船舶,其模型的精度并不能保證。故本文研究使 Nomoto 模型形象化仍然具有較好的實用價值。
1 等效電路
式(1)給出了從舵角輸入 δ 到船首向輸出 ψ 的傳遞函數形式 Nomoto 數學模型 G(s),式中 K和T 在航海領域中分別稱為旋回性指數和追隨性指數。

觀察式(1)可知它由比例、積分和一階慣性 3個環節組成。比例和積分環節的實現需要放大器元件,而一階慣性環節可由一階 RC 網絡實現。將文獻[1]中使用電路網絡法獲得傳遞函數數學模型理解透徹后,可反過來使用該方法,將傳遞函數的數學模型變成電路網絡,圖1給出了式(1)最后的實現電路。
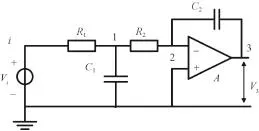
圖1 Nomoto 模型等效電路Fig. 1 An equivalent Nomoto model by circuit
由文獻[1]給出的快速推導傳遞函數數學模型方法,該電路由 3個有效節點組成,有 1個放大器元件,分母中除了含放大器元件回路項外,其他項都可省略,得到數學模型的過程如下:

為了簡化,令 R1=R2,則

以大連海事大學教學科研實習船“育鯤”為例,其船舶兩柱間長為105 m,船寬 18 m,吃水 5.4 m,排水體積 5 735.5 m3,實驗航速 15 kn(設計航速 16.7 kn),方形系數為0.559 5,舵葉面積 11.46 m2,理論計算 K=-0.28 s-1,T=71.84 s。船舶實際回轉時都有速度下降,30°舵角回轉實驗時船舶轉一圈速度可降為初始速度的48%,而使用電路網絡實現的船舶模型難以實現回轉時的速度下降,但可進行相應的影響折算[7-10]。海上試驗時速度下降、水深變淺等影響折合成對 K,T 的改變,都是減小 K、增大 T,使船舶的旋回和操縱性能下降。進行 30°舵角海上旋回試驗時,其影響最終折合為K=-0.167 s-1,T=115.8 s,則由式(3)可設:R1=R2=1 200 Ω,C1=0.193 F,C2=0.0025 F。
2 仿真實驗
使用 Matlab 2010b 的 Powerlib 電路系統工具箱進行仿真。在 Powerlib 工具箱中不存在放大器元件,如圖2所示利用電阻元件、電壓測量元件、Gain 增益元件、可控電壓源元件和Powergui 元件構建一個放大器元件[11],全選后單擊鼠標右鍵選擇“create subsystem”進行封裝,再單擊右鍵選擇“Mask subsystem”,在彈出的圖3~圖5窗口中按所示設置好各參數。注意圖3繪制放大器元件形狀的 3 根線時,使用 Plot 函數時如plot([0 0],[-1 1]),繪制直線的 2個坐標點是橫坐標放在一個向量里、縱坐標放在一個向量里,即 2個坐標點實際為(0,-1)和(0,1)。另外圖2中元件的變量名要與圖4中的變量名設為一致。圖6給出最后的使用電路元件進行 30°舵角回轉的仿真實驗框圖,圖中最右側的 Gain 元件用于弧度變角度的轉換。船舶位置是根據仿真得出的船首向角 ψ、初始航速 u=15 kn 使用計算得出。圖7給出了電路仿真結果與實船試驗結果的比較,圖7中稍高一些的曲線為實船試驗曲線,稍低一些的曲線為電路等效 Nomoto 模型仿真曲線,船舶的橫縱坐標都除了船長 L。

圖2 放大器元件構建Fig. 2 Building amplifier

圖3 放大器參數設置界面一Fig. 3 First setting window of amplifier parameters
為了方便分析,定義了式(4)所示的曲線符合度。使用曲線符合度的概念可以較好地說明仿真曲線與實船試驗曲線的符合程度。
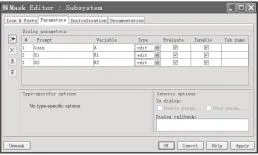
圖4 放大器參數設置界面二Fig. 4 Second setting window of amplifier parameters

圖5 放大器參數設置界面三Fig. 5 Third setting window of amplifier parameters

圖6 仿真電路圖Fig. 6 Circuit diagram of simulation

圖7 仿真結果Fig. 7 Simulation result

由圖7可知,仿真時橫向戰術直徑 3.5 L,實船3.35 L;仿真時縱向戰術直徑 2.8 L,實船 3.6 L,橫向縱向平均符合度為86.8%。因為進行了速度和水深影響的折合,其精度比 Nomoto 模型本身的精度稍高。Nomoto 模型的優點是形式簡單、只有 2個參數且物理意義明顯,但精度不高是其不足。如果 Nomoto 模型與實船試驗的結果曲線符合度能達到 90%以上,反而難以讓人相信。
3 另外一種解法
深入研究發現,Nomoto 模型的電路實現方法并不唯一,圖8給出了式(1)另外一種實現電路。

圖8 Nomoto 模型另外一種等效電路Fig. 8 Another equivalent Nomoto model by circuit
由文獻[1]給出的快速推導傳遞函數數學模型方法,該電路由 5個有效節點組成,有 2個放大器元件,分母中除了相互獨立的 2個放大器元件回路項外,其他項都可省略,得到數學模型的過程如下:

式中:
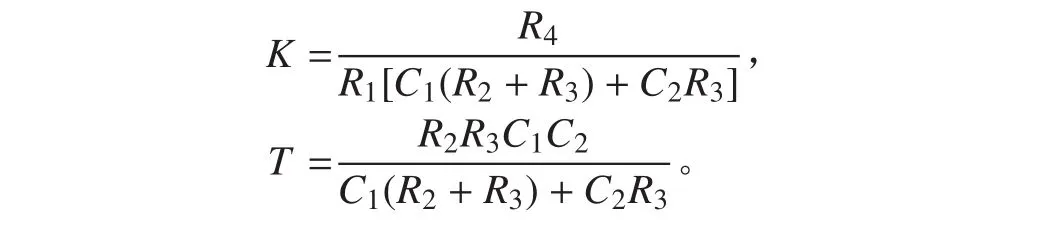
為了簡化,令 R2=R3,C1=C2,則
這樣,任意船舶的等效數學模型的旋回性指數 K唯一由電阻 R1確定,追隨性指數 T 唯一由電阻 R2確定,等效模型的構建變得更為簡單。
設 R1=2 Ω,R2=347.4 Ω,即可得到與圖7相同的仿真結果。
4 結 語
本文給出了 2種船舶 Nomoto 模型的電路網絡實現形式,從理論上推導出的數學模型與 Nomoto 模型相同,使用 Matlab 仿真驗證了其與實船試驗結果符合度為86.8%。如果船舶 Nomoto 模型的 K,T 指數不做速度等影響的折合,則模型精度只能達到約 75%。下一步計劃真正使用電路、電容和放大器元件搭建成電路板,然后使用儀器測量輸出電壓,進行相關的物理實驗,結果將更直觀。本研究使用電路軟件仿真船舶模型,為進一步的半物理仿真打下理論基礎。
[1]王賢惠, 紀致紋. 線性電工、電子及機械網絡計算新法[M].大連: 大連海事大學出版社, 1997. WANG Xian-hui, JI Zhi-wen. A new method for calculating linear electrical, electronic and mechanical network[M]. Dalian: Dalian Maritime University Press, 1997.
[2]張顯庫, 金一丞. 控制系統建模與數字仿真[M]. 2版. 大連:大連海事大學出版社, 2013. ZHANG Xian-ku, JIN Yi-cheng. Modeling and digital simulation for control systems[M]. 2nd ed. Dalian: Dalian Maritime University Press, 2013.
[3]張顯庫. 船舶運動簡捷魯棒控制[M]. 北京: 科學出版社,2012. ZHANG Xian-ku. Concise robust control for ships[M]. Beijing: Science Press, 2012.
[4]ZHANG X K, ZHANG G Q, ZHANG S H, et al. Researches on the Williamson turn for very large carriers[J]. Naval Engineers Journal, 2013, 125(4): 129-137.
[5]ZHANG G Q, ZHANG X K. Concise robust adaptive path-following control of underactuated ships using DSC and MLP[J]. IEEE Journal of Oceanic Engineering, 2014, 39(4): 685-694.
[6]趙越. 欠驅動船舶水面的非線性數學模型及跟蹤控制[J]. 艦船科學技術, 2015, 37(5): 192-195. ZHAO Yue. Nonlinear methematical model and tracking control study for underactuated marine surface vessels[J]. Ship Science and Technology, 2015, 37(5): 192-195.
[7]李曉君, 謝新連. 重大件運輸的貨物分配與航速聯合優化[J].西南交通大學學報, 2015, 50(4): 747-754. LI Xiao-jun, XIE Xin-lian. Integrated optimization of cargo distribution and ship speed for heavy-cargo transportation[J]. Journal of Southwest Jiaotong University, 2015, 50(4):747-754.
[8]范愛龍, 嚴新平, 尹奇志, 等. 船舶主機能效模型[J]. 交通運輸工程學報, 2015, 15(4): 69-76. FAN Ai-long, YAN Xin-ping, YIN Qi-zhi, et al. Energy efficiency model of marine main engine[J]. Journal of Traffic and Transportation Engineering, 2015, 15(4): 69-76.
[9]趙志強, 閆亞勝, 黃連忠, 等. 船舶翼帆回轉速度的非線性補償控制[J]. 哈爾濱工程大學學報, 2015, 36(10): 1346-1350. ZHAO Zhi-qiang, YAN Ya-sheng, HUANG Lian-zhong, et al. Nonlinear compensation of ship wing-sail slewing speed[J]. Journal of Harbin Engineering University, 2015, 36(10):1346-1350.
[10]張顯庫. 基于 Lyapunov 穩定性的船舶航向保持非線性控制[J]. 西南交通大學學報, 2010, 45(1): 140-143. ZHANG Xian-ku. Nonlinear control for ship course-keeping based on Lyapunov stability[J]. Journal of Southwest Jiaotong University, 2010, 45(1): 140-143.
[11]哼之月. 有關如何讓用matlab制作放大器[EB/OL]. (2012-11-21). http://blog.sina. com.cn/s/blog_a19f963501012ysl.html. HENG Zhi-yue. (2012-11-21). http://blog.sina.com.cn/s/ blog_a19f963501012ysl.html.
An equivalent Nomoto model of ships by circuit
ZHANG Xian-ku, YANG Guang-ping
(Navigation College, Dalian Maritime University, Dalian 116026, China)
In order to make the Nomoto model of ships visual, a circuit is built using resistances, capacitors and the amplifiers. The derived transfer function of circuit is the same as the Nomoto model of ships. An equivalent Nomoto model of Vessel Yukun by circuit is realized by appropriately choosing the parameters of circuit elements. The simulation results of circuit added speed loss compensation during turning, indicate that the model of circuit can be equivalent to the Nomoto model with satisfactory precision, comparing with the experimental results of real ship turning. And this has the important guiding significance to the semi-physical simulation of ship motion.
ship model;circuit;equivalent
U661.73
A
1672-7619(2016)09-0112-04
10.3404/j.issn.1672-7619.2016.09.023
2016-02-02;
2016-02-29
國家自然科學基金資助項目(51109020,51409033);中央高校基本科研業務費專項資金資助項目(3132014302)
張顯庫(1968-),男,教授,主要從事船舶運動控制及魯棒控制研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03