iGPS系統(tǒng)測(cè)量精度測(cè)試與分析
2016-11-04 02:22:20易旺民楊再華楊玉海
測(cè)繪科學(xué)與工程 2016年1期
楊 振,易旺民,楊再華,李 叢,楊玉海
1.信息工程大學(xué),河南 鄭州,450001;2.北京衛(wèi)星環(huán)境工程研究所,北京,100094
?
iGPS系統(tǒng)測(cè)量精度測(cè)試與分析
楊振1,易旺民2,楊再華2,李叢1,楊玉海1
1.信息工程大學(xué),河南 鄭州,450001;2.北京衛(wèi)星環(huán)境工程研究所,北京,100094
iGPS測(cè)量系統(tǒng)已經(jīng)在國(guó)外航空航天制造與檢測(cè)、汽車(chē)船舶工業(yè)設(shè)計(jì)與制造、大型工業(yè)設(shè)備安裝與檢測(cè)、逆向工程等領(lǐng)域廣泛應(yīng)用。國(guó)內(nèi)應(yīng)用則剛剛展開(kāi),因?qū)ζ淞私獠粔蛏钊耄瑴y(cè)量精度沒(méi)有進(jìn)行嚴(yán)格的對(duì)比和測(cè)試,多數(shù)應(yīng)用于輔助測(cè)量任務(wù)。基于上述現(xiàn)狀,本文分析了iGPS系統(tǒng)的測(cè)量與坐標(biāo)解算原理,并分別對(duì)系統(tǒng)建站精度、靜態(tài)單點(diǎn)內(nèi)符合測(cè)量精度、與其它坐標(biāo)測(cè)量系統(tǒng)的坐標(biāo)轉(zhuǎn)換精度以及不同運(yùn)動(dòng)狀態(tài)下系統(tǒng)的動(dòng)態(tài)測(cè)量精度進(jìn)行了實(shí)驗(yàn)測(cè)試,得到了有關(guān)系統(tǒng)精度的可靠結(jié)論。
iGPS系統(tǒng);系統(tǒng)精度;動(dòng)態(tài)測(cè)量;公共點(diǎn)轉(zhuǎn)換
1 引 言
20世紀(jì)90年代,美國(guó)ARCSECOND公司率先開(kāi)發(fā)出了一種具有高精度和高效率的室內(nèi)GPS系統(tǒng),即iGPS系統(tǒng),用于室內(nèi)空間點(diǎn)位測(cè)量與定位。iGPS定位原理與GPS類(lèi)似,系統(tǒng)通過(guò)計(jì)算接收器相對(duì)于發(fā)射器的水平角和垂直角而實(shí)現(xiàn)點(diǎn)坐標(biāo)測(cè)量。iGPS系統(tǒng)相對(duì)于目前主流的工業(yè)測(cè)量設(shè)備,具備以下三個(gè)突出的優(yōu)點(diǎn):(1)多目標(biāo)實(shí)時(shí)動(dòng)態(tài)測(cè)量。標(biāo)定好的iGPS測(cè)量場(chǎng)內(nèi)可以支持多個(gè)(理論上數(shù)量無(wú)限制)獨(dú)立的接收器同時(shí)工作,互不影響,所測(cè)點(diǎn)坐標(biāo)能實(shí)時(shí)保存到數(shù)據(jù)庫(kù)中。(2)通視性要求不高。相比其它測(cè)量系統(tǒng),iGPS無(wú)需每個(gè)發(fā)射器與接收器都達(dá)到通視條件,由于發(fā)射器單元可以安置在待測(cè)空間任意位置,工作時(shí)接收器只要能接收到任意兩個(gè)以上的發(fā)射器信號(hào)即可實(shí)現(xiàn)測(cè)量。同時(shí),根據(jù)具體測(cè)量環(huán)境布設(shè)一定數(shù)量的發(fā)射器后即可有效避免其它測(cè)量系統(tǒng)轉(zhuǎn)站測(cè)量的問(wèn)題。(3)測(cè)量場(chǎng)標(biāo)定過(guò)程簡(jiǎn)單。測(cè)量場(chǎng)標(biāo)定一次即可實(shí)現(xiàn)無(wú)限次使用,大大提高了測(cè)量效率[1-3]。
2 iGPS系統(tǒng)測(cè)量與坐標(biāo)解算原理
iGPS系統(tǒng)由激光發(fā)射器(類(lèi)似GPS衛(wèi)星)、激光接收器(類(lèi)似GPS接收機(jī))、Scale Bar(基準(zhǔn)尺)及相應(yīng)附件(包括信號(hào)放大器、解算處理器等)組成,如圖1所示。其核心是能發(fā)射扇形光束的激光發(fā)射器。系統(tǒng)運(yùn)行后每臺(tái)發(fā)射器都以一定角速度勻速旋轉(zhuǎn),同時(shí)發(fā)射兩種激光束。一種為選通脈沖激光,作為方位角的起始方向參考;另一種為兩束扇形光束,如圖2所示,扇形光束在水平面上夾角固定(90°左右),接收器的空間位置不同,兩束扇形光束旋轉(zhuǎn)經(jīng)過(guò)接收器的時(shí)間差就不同,以此作為iGPS系統(tǒng)角度測(cè)量依據(jù)[1]。

圖1 iGPS系統(tǒng)組成

圖2 iGPS發(fā)射器扇形光束
對(duì)于某發(fā)射器而言,設(shè)t1時(shí)刻扇形光束1到達(dá)接收器,t2時(shí)刻扇形光束2到達(dá)接收器,則該接收器相對(duì)于該發(fā)射器的水平角和垂直角分別為:
(1)
(2)
式中,ω為發(fā)射器旋轉(zhuǎn)的角速度,θ為兩束扇形光束在水平面內(nèi)夾角,φ為任一扇形面與水平面的夾角值,都為固定值。
為了實(shí)現(xiàn)最終點(diǎn)位坐標(biāo)測(cè)量,測(cè)量場(chǎng)中還需要加入長(zhǎng)度基準(zhǔn)。iGPS系統(tǒng)采用手持接收器基準(zhǔn)尺實(shí)現(xiàn)長(zhǎng)度基準(zhǔn)解算。基準(zhǔn)尺兩端分別固定有標(biāo)準(zhǔn)接收器,其中心間距已被標(biāo)定。測(cè)量前需將基準(zhǔn)尺在測(cè)量場(chǎng)內(nèi)移動(dòng),得到一定數(shù)量的基準(zhǔn)尺觀(guān)測(cè)值后即可實(shí)現(xiàn)系統(tǒng)坐標(biāo)系的建立。與經(jīng)緯儀系統(tǒng)坐標(biāo)系建立有所區(qū)別,這里的發(fā)射器間無(wú)法實(shí)現(xiàn)互瞄測(cè)量,且沒(méi)有水準(zhǔn)器等設(shè)備進(jìn)行發(fā)射器的調(diào)平,因此,系統(tǒng)的定向解算方法采用六自由度三維網(wǎng)平差的方法。對(duì)于任一發(fā)射器i和任一探測(cè)器中心點(diǎn)k的觀(guān)測(cè)值有:
(3)
(4)
(5)
其中,Hz、V、S分別為相應(yīng)的水平角、垂直角和斜距觀(guān)測(cè)值。對(duì)上述方程線(xiàn)性化后即可解得所有發(fā)射器中心坐標(biāo)和基準(zhǔn)尺探測(cè)器的坐標(biāo)值。系統(tǒng)坐標(biāo)系建立過(guò)程中,可通過(guò)自定義的方式指定坐標(biāo)系的原點(diǎn)和三軸指向。坐標(biāo)系建立完成后,當(dāng)探測(cè)器的位置能同時(shí)接收到兩個(gè)以上的發(fā)射器信號(hào),即該位置有兩組以上的水平垂直觀(guān)測(cè)角度值,就可解算出探測(cè)器的在指定坐標(biāo)系下的中心點(diǎn)位坐標(biāo)[4-6]。
3 iGPS系統(tǒng)精度測(cè)試
iGPS系統(tǒng)的精度主要取決于三個(gè)方面:與發(fā)射器有關(guān)的誤差,與接收器有關(guān)的誤差和環(huán)境誤差。與發(fā)射器有關(guān)的誤差主要包括發(fā)射器發(fā)出的扇形光束相應(yīng)角度與標(biāo)準(zhǔn)值不符合等系統(tǒng)誤差;與接收器有關(guān)誤差主要包括接收器信號(hào)接收中心與實(shí)際物理中心不符合的誤差;環(huán)境誤差主要包括溫度和氣壓對(duì)光學(xué)發(fā)射和接收產(chǎn)生的影響。上述誤差影響可通過(guò)系統(tǒng)標(biāo)校、穩(wěn)定系統(tǒng)測(cè)量環(huán)境等方法予以改善。另外,系統(tǒng)不同的建站方法對(duì)系統(tǒng)精度也有一定影響,靜態(tài)測(cè)量和動(dòng)態(tài)測(cè)量時(shí)系統(tǒng)精度也有差別[1,7]。
3.1系統(tǒng)建站精度測(cè)試
iGPS系統(tǒng)理論上支持兩個(gè)以上,多至無(wú)限個(gè)發(fā)射器在空間任意位置建站。實(shí)際作業(yè)中,根據(jù)測(cè)量空間需要,一般在室內(nèi)空間布置3-8臺(tái)發(fā)射器進(jìn)行測(cè)量。測(cè)試中,在15×30m室內(nèi)空間范圍內(nèi)(常溫、標(biāo)準(zhǔn)氣壓)按照不同方式分別布設(shè)3-6臺(tái)發(fā)射器進(jìn)行多次建站。建站過(guò)程中,發(fā)射器基本處于同一高程平面內(nèi),將基準(zhǔn)尺在測(cè)量空間范圍內(nèi)任意位置移動(dòng),基準(zhǔn)尺兩頭的接收器接收到測(cè)量信號(hào),得到一定數(shù)量點(diǎn)位空間信息,利用軟件計(jì)算每臺(tái)發(fā)射器的平差精度,不同結(jié)果顯示在表1-4中。
表13臺(tái)發(fā)射器建站系統(tǒng)精度(mm)

基準(zhǔn)尺點(diǎn)數(shù)1號(hào)發(fā)射器2號(hào)發(fā)射器3號(hào)發(fā)射器平均350.1190.1370.1340.130520.1080.1260.1280.121980.1210.1380.1360.131
表24臺(tái)發(fā)射器建站系統(tǒng)精度(mm)

基準(zhǔn)尺點(diǎn)數(shù)1號(hào)發(fā)射器2號(hào)發(fā)射器3號(hào)發(fā)射器4號(hào)發(fā)射器平均420.1270.1090.1290.1270.123670.1160.1330.1280.1340.128920.1280.1310.1370.1410.1341400.1490.1340.1360.1280.137
表35臺(tái)發(fā)射器建站系統(tǒng)精度(mm)

基準(zhǔn)尺點(diǎn)數(shù)1號(hào)發(fā)射器2號(hào)發(fā)射器3號(hào)發(fā)射器4號(hào)發(fā)射器5號(hào)發(fā)射器平均820.1260.1190.1350.1290.1300.1281660.1390.1460.1330.1480.1370.141
表46臺(tái)發(fā)射器建站系統(tǒng)精度(mm)

基準(zhǔn)尺點(diǎn)數(shù)1號(hào)發(fā)射器2號(hào)發(fā)射器3號(hào)發(fā)射器4號(hào)發(fā)射器5號(hào)發(fā)射器6號(hào)發(fā)射器平均940.1340.1490.1310.1320.1300.1370.1361810.1470.1520.1390.1430.1570.1470.148
從以上結(jié)果可以看出,iGPS系統(tǒng)的建站精度較為穩(wěn)定,隨著發(fā)射器的增多以及測(cè)量基準(zhǔn)尺點(diǎn)數(shù)的增多,平差結(jié)果本身沒(méi)有出現(xiàn)明顯的變化,系統(tǒng)精度不會(huì)因?yàn)榘l(fā)射器臺(tái)數(shù)的增加而大幅提高。因此,從系統(tǒng)穩(wěn)定性、可靠性、經(jīng)濟(jì)性和測(cè)量的通視性出發(fā),普通場(chǎng)地布設(shè)4臺(tái)發(fā)射器,基準(zhǔn)尺測(cè)量點(diǎn)數(shù)設(shè)置為發(fā)射器個(gè)數(shù)的10-15倍,基本可以滿(mǎn)足測(cè)量任務(wù)需求。
在4臺(tái)發(fā)射器基礎(chǔ)上,進(jìn)一步改變建站網(wǎng)形。分三種情況進(jìn)行建站,網(wǎng)形一為將1號(hào)發(fā)射器降低0.5m,其余發(fā)射器不變;網(wǎng)形二為將1、2號(hào)發(fā)射器降低0.5m,3、4號(hào)發(fā)射器升高0.5m;網(wǎng)形三為將1、3號(hào)發(fā)射器降低0.5m,2、4號(hào)發(fā)射器升高0.5m。網(wǎng)形二和網(wǎng)形三使發(fā)射器間高差達(dá)到1m左右,三種網(wǎng)形測(cè)量基準(zhǔn)尺點(diǎn)數(shù)均為60個(gè)左右,重新計(jì)算建站精度,平差結(jié)果見(jiàn)表5。
表54臺(tái)發(fā)射器三種網(wǎng)形建站系統(tǒng)精度(mm)

基準(zhǔn)尺點(diǎn)數(shù)1號(hào)發(fā)射器2號(hào)發(fā)射器3號(hào)發(fā)射器4號(hào)發(fā)射器平均網(wǎng)形一0.0970.1110.0930.0870.097網(wǎng)形二0.0840.0750.0730.0750.077網(wǎng)形三0.0720.0810.0770.0780.077
從表5可看出,在改變網(wǎng)形后,特別是發(fā)射器間有一定高差時(shí),建站平差結(jié)果有明顯的改善。分析原因在于平差時(shí)其基準(zhǔn)尺的不確定性,當(dāng)基準(zhǔn)尺在運(yùn)動(dòng)時(shí),由于基準(zhǔn)尺本身的姿態(tài)在不斷變化,部分點(diǎn)位對(duì)于發(fā)射器的角度交會(huì)性不理想,特別是發(fā)射器都處于同一水平面時(shí)不利于平差計(jì)算,因此改善發(fā)射器組網(wǎng)的網(wǎng)形可有效提高系統(tǒng)整體平差精度[7]。在實(shí)際測(cè)量工程中,可視情況盡量將空間發(fā)射器設(shè)置為不同水平面組網(wǎng)。
3.2靜態(tài)點(diǎn)位內(nèi)符合精度測(cè)試
iGPS系統(tǒng)屬于動(dòng)態(tài)實(shí)時(shí)測(cè)量,測(cè)量靜態(tài)點(diǎn)位時(shí)需將接收器通過(guò)特定工裝或其它方法穩(wěn)定在待測(cè)點(diǎn)位,系統(tǒng)按照一定頻率進(jìn)行實(shí)時(shí)測(cè)量,并顯示誤差范圍。測(cè)試中,在15×30m室內(nèi)空間范圍內(nèi)(常溫、標(biāo)準(zhǔn)氣壓)布設(shè)4臺(tái)發(fā)射器進(jìn)行建站,接收器終端采用標(biāo)準(zhǔn)1.5英寸球,與通用基座配合使用,如圖3所示。在空間通視情況良好的平臺(tái)上固定設(shè)置5個(gè)基座,重復(fù)測(cè)量8次,計(jì)算每個(gè)點(diǎn)的均方根誤差,結(jié)果顯示在表6中。

圖3 1.5英寸標(biāo)準(zhǔn)球終端
表6靜態(tài)點(diǎn)位內(nèi)符合精度測(cè)試(mm)

點(diǎn)號(hào)XYZ點(diǎn)位Point10.1412250.2068650.0508890.256Point20.0877750.2013550.0234860.221Point30.0917680.1369060.0354830.169Point40.1274030.2556630.0450360.289Point50.1430530.1745420.0589980.233
從以上結(jié)果可以分析,測(cè)量環(huán)境穩(wěn)定情況下,iGPS系統(tǒng)靜態(tài)測(cè)量綜合點(diǎn)位坐標(biāo)值較為穩(wěn)定,不確定度保持在0.2mm左右,達(dá)到了標(biāo)稱(chēng)精度。結(jié)果中Z方向精度較高,反映了實(shí)際測(cè)量過(guò)程中坐標(biāo)系的建立方法與人為測(cè)量因素。iGPS系統(tǒng)屬于接觸實(shí)時(shí)測(cè)量系統(tǒng),靜態(tài)固定點(diǎn)位的測(cè)量需要將接收器與待測(cè)點(diǎn)接觸,測(cè)量過(guò)程中不可避免受人為因素影響,系統(tǒng)要求坐標(biāo)數(shù)值穩(wěn)定在一定范圍內(nèi)才可測(cè)量。由于建立測(cè)量坐標(biāo)系采用三點(diǎn)法,其中前三臺(tái)發(fā)射器的平面法線(xiàn)方向?yàn)閆方向,其接近豎直方向,因此,當(dāng)使用基座進(jìn)行測(cè)量時(shí)Z方向數(shù)值基本穩(wěn)定。通過(guò)測(cè)試,很好地反映了iGPS系統(tǒng)靜態(tài)單點(diǎn)測(cè)量的特點(diǎn)。
3.3與其它測(cè)量系統(tǒng)公共點(diǎn)轉(zhuǎn)換精度測(cè)試
iGPS系統(tǒng)接收器可配置多種測(cè)量終端,其中的1.5英寸標(biāo)準(zhǔn)球所測(cè)坐標(biāo)點(diǎn)為球中心點(diǎn),等效于激光跟蹤儀1.5英寸標(biāo)準(zhǔn)球棱鏡。測(cè)試中,在15×30m室內(nèi)空間范圍內(nèi)(常溫、標(biāo)準(zhǔn)氣壓)布設(shè)4臺(tái)發(fā)射器進(jìn)行建站,在空間不同通視條件的位置(墻壁、平臺(tái)、地面)固定設(shè)置15個(gè)基座,分別利用徠卡AT901型激光跟蹤儀和徠卡TM6100A電子經(jīng)緯儀進(jìn)行測(cè)量,獲取15個(gè)點(diǎn)空間坐標(biāo),并進(jìn)行最小二乘擬合的公共點(diǎn)轉(zhuǎn)換,計(jì)算轉(zhuǎn)換精度,結(jié)果顯示在表7中。
表7公共點(diǎn)轉(zhuǎn)換精度測(cè)試(mm)
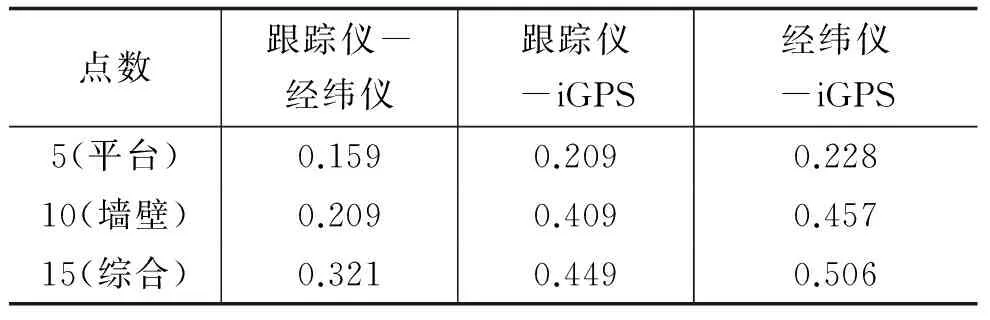
點(diǎn)數(shù)跟蹤儀-經(jīng)緯儀跟蹤儀-iGPS經(jīng)緯儀-iGPS5(平臺(tái))0.1590.2090.22810(墻壁)0.2090.4090.45715(綜合)0.3210.4490.506
從上表可以分析,iGPS系統(tǒng)點(diǎn)位絕對(duì)精度與內(nèi)符合精度基本保持一致,在較為穩(wěn)定的平臺(tái)進(jìn)行點(diǎn)位測(cè)量,轉(zhuǎn)換精度達(dá)到標(biāo)稱(chēng)數(shù)值0.2mm。隨著參與轉(zhuǎn)換的點(diǎn)位增多,綜合轉(zhuǎn)換精度亦在可接受范圍。公共點(diǎn)轉(zhuǎn)換的精度為iGPS系統(tǒng)與其它測(cè)量系統(tǒng)進(jìn)行聯(lián)合測(cè)量提供了良好的保證。通過(guò)不同接收器工裝的配合,iGPS系統(tǒng)可以實(shí)現(xiàn)與經(jīng)緯儀測(cè)量系統(tǒng)、激光跟蹤測(cè)量系統(tǒng)、全站儀測(cè)量系統(tǒng)、關(guān)節(jié)臂等多種工業(yè)測(cè)量系統(tǒng)進(jìn)行聯(lián)合,實(shí)現(xiàn)復(fù)雜工業(yè)設(shè)備的精密測(cè)量。
3.4動(dòng)態(tài)測(cè)量精度測(cè)試
iGPS系統(tǒng)可進(jìn)行不同頻率的實(shí)時(shí)動(dòng)態(tài)測(cè)量,但受發(fā)射器轉(zhuǎn)速影響,測(cè)量頻率不高,實(shí)現(xiàn)較穩(wěn)定動(dòng)態(tài)測(cè)量的頻率不高于20hz。為測(cè)試動(dòng)態(tài)測(cè)量精度,在15×30m室內(nèi)空間范圍內(nèi)(常溫、標(biāo)準(zhǔn)氣壓)布設(shè)4臺(tái)發(fā)射器進(jìn)行建站,將探測(cè)器綁定于BallBar桿上一端,如圖4所示。

圖4 動(dòng)態(tài)測(cè)量精度測(cè)試
BallBar接通電源后以低中高三種速度作圓周運(yùn)動(dòng)兩周,利用iGPS系統(tǒng)以不同頻率采集測(cè)量數(shù)據(jù),同時(shí)用激光跟蹤儀進(jìn)行測(cè),并作圓擬合計(jì)算,結(jié)果顯示在表8中。
表8動(dòng)態(tài)測(cè)量精度測(cè)試(mm)

測(cè)量頻率運(yùn)轉(zhuǎn)速度測(cè)量點(diǎn)數(shù)iGPS擬合圓跟蹤儀測(cè)量數(shù)值2hz低速941.6852hz中速421.4682hz高速191.47110hz低速5741.44810hz中速2021.59410hz高速971.48220hz低速10751.48420hz中速3961.65320hz高速1951.4720.020
從上表可以分析,iGPS系統(tǒng)實(shí)現(xiàn)動(dòng)態(tài)測(cè)量時(shí)精度較低,達(dá)到1.5mm左右,但系統(tǒng)以不同頻率對(duì)不同速度物體實(shí)現(xiàn)動(dòng)態(tài)測(cè)量時(shí),跟蹤準(zhǔn)確,很少出現(xiàn)粗差點(diǎn),點(diǎn)位精度保持穩(wěn)定。
4 結(jié) 論
針對(duì)iGPS系統(tǒng)的測(cè)量原理、坐標(biāo)計(jì)算和系統(tǒng)建站原理作了分析,對(duì)系統(tǒng)在各種情況下的測(cè)量精度問(wèn)題作了具體的測(cè)試與分析。測(cè)試結(jié)果表明,iGPS系統(tǒng)建站方便快捷,系統(tǒng)穩(wěn)定可靠, 測(cè)量
精度較高,靜態(tài)測(cè)量點(diǎn)位達(dá)到了0.2mm的標(biāo)稱(chēng)精度,動(dòng)態(tài)測(cè)量精度相對(duì)較低。利用iGPS系統(tǒng)可以實(shí)現(xiàn)快速、準(zhǔn)確的工業(yè)測(cè)量和檢測(cè)任務(wù),也可以與其它多種測(cè)量系統(tǒng)實(shí)現(xiàn)聯(lián)合測(cè)量,應(yīng)用于越來(lái)越多的工業(yè)制造和安裝領(lǐng)域。
[1] 李廣云,李宗春. 工業(yè)測(cè)量系統(tǒng)原理與應(yīng)用[M].北京:測(cè)繪出版社, 2011.
[2] 杜福洲,陳哲涵,唐曉青. iGPS測(cè)量場(chǎng)精度分析及其應(yīng)用研究[J].航空學(xué)報(bào),2012,33(9):1737-1744.
[3] 鄒方,尚可. 未來(lái)工廠(chǎng)的數(shù)字化測(cè)量世界[J]. 航空制造技術(shù),2008(19):26-29.
[4] 康海東,范百興,李宗春等. iGPS測(cè)量技術(shù)及其精度分析[J].測(cè)繪通報(bào),2012(3) : 9-11.[5] 吳曉峰,張國(guó)雄. 室內(nèi)GPS測(cè)量系統(tǒng)及其在飛機(jī)裝配中的應(yīng)用[J]. 航空精密制造技術(shù),2006,42(5) :1-5.[6] 張劍清,胡安文. 多基線(xiàn)攝影前方交會(huì)方法與精度分析[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2008, 32(10):847-851.[7] Maropoulos P G, Guo Y, Jamshidi J, et al. Large Volume Metrology Process Models: A Framework for Integrating Measurement with Assembly Planning[J]. CIRP Annals-manufacturing Technology, 2008, 57(2):477-480.
Test and Analysis of iGPS System Accuracy
Yang Zhen1, Yi Wangmin2, Yang Zaihua2, Li Cong1, Yang Yuhai1
1. Information Engineering University, Zhengzhou 450001, China 2. Beijing Research Institute of Satellite Environment Engineering, Beijing 100094, China
iGPS measuring system has been widely applied in various fields at abroad, such as aerospace manufacturing and testing, marine industries, installation and test of large-size industrial equipment and reverse engineering. However, the system is mainly used for assistant measuring in China for lack of necessary knowledge and rigorous comparison and test of measuring accuracy. According to the situation, the measurement and coordinate calculation principles of iGPS system are analyzed, and the coordinate system accuracy, static single point measuring accuracy, dynamic accuracy and coordinate transformation accuracy in various situations are tested to reach a reliable conclusion about the system accuracy.
iGPS system; system accuracy; dynamic measuring; common point transformation
2015-11-10。
航天器高精度測(cè)量聯(lián)合實(shí)驗(yàn)室基金資助項(xiàng)目(201401)。
楊振(1981—),男,講師,主要從事精密工程測(cè)量研究。
P258
A
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
